Validación del Sistema de control sobre Robot Diferencial
Alejandro Daniel José Gómez Flórez
Estudiante de Ingeniería de Control
Objetivo
La finalidad es implementar un sistema de control, que permita controlar las trayectorias sobre un robot móvil, cuya tracción está dada por la diferencia de velocidades de dos ruedas.
Trabajo Previo
En el semestre 2014-02 se realizó un estudio sobre el modelado de robots diferenciales, en un Proyecto Academico Especial dirigido por la profesora Eliana Arango y realizado por las estudiantes Verónica Londoño y Maria Clara Salazar.
Trabajo Previo
Se destaca el uso del modelado del sistema mecánico a partir de las ecuaciones de Euler-Lagrange:
Energía cinética
Energía Potencial
Lagrangiano
Fuerzas externas
Trabajo Previo
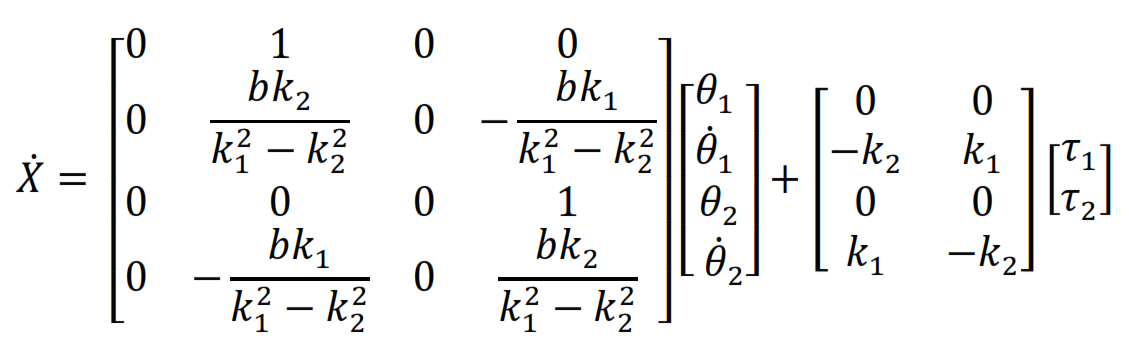
Variables de estado:
Trabajo Previo
Trabajo Previo
la velocidad lineal y la velocidad angular de cuerpo del robot puede representarse como el promedio de la suma de las velocidades angulares
Trabajo Previo
La señal de salida:
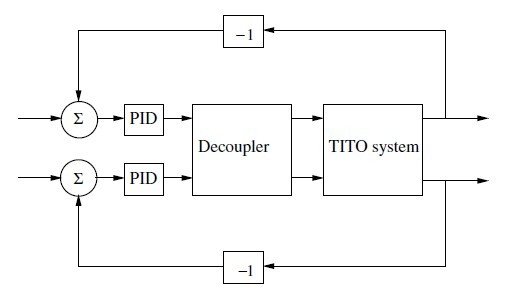
Dos funciones de transferencia:
Controlador:
Un polo más rápido para la solución de la ecuación de Diphantine.
Trabajo Previo
Trabajo Previo
Resultados:
Objetivos Nuevos:
Implementación y validación:

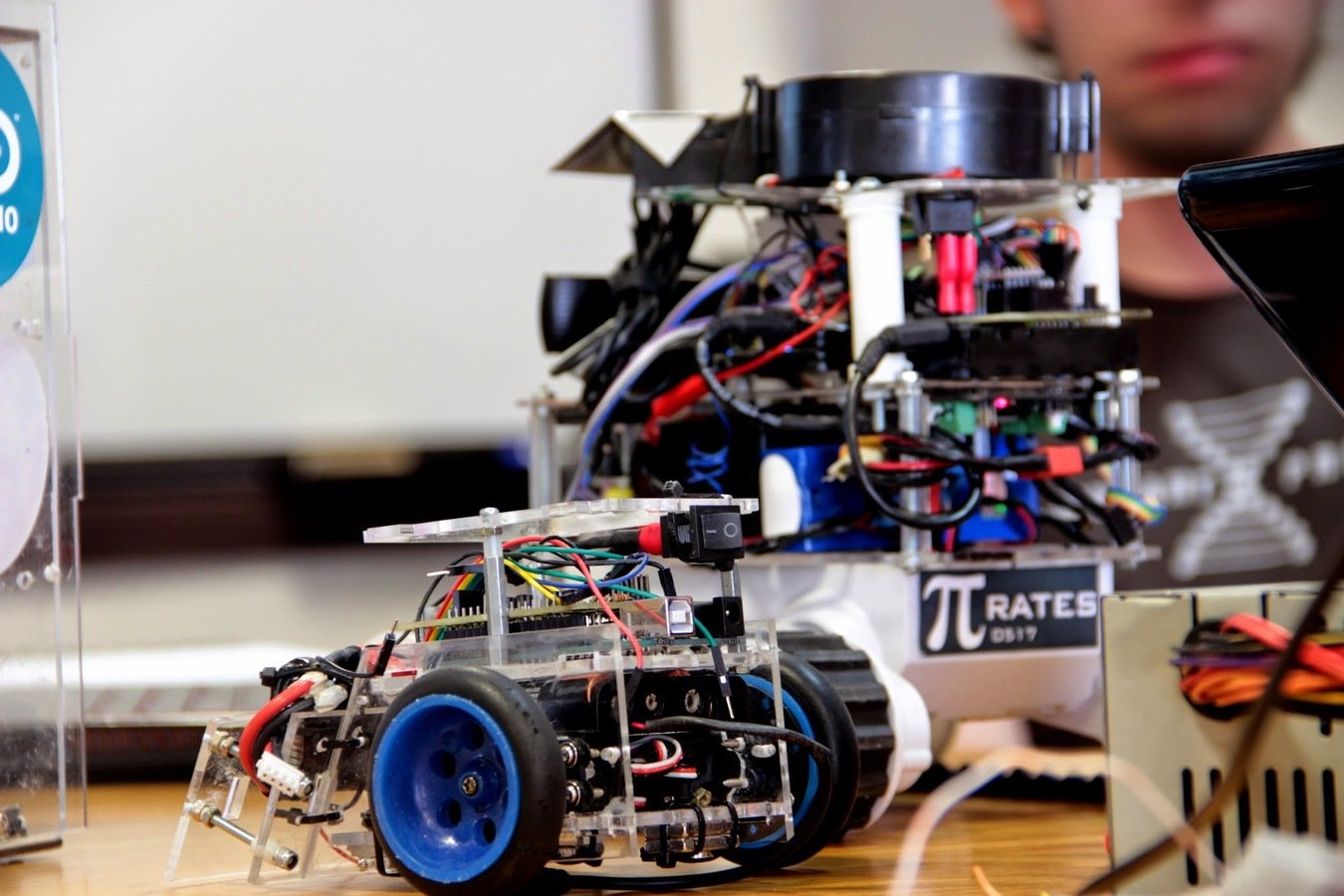
ROBOT
