Fast Trajectory Optimization for Legged Robots using Vertex-Based ZMP Constraints


Alexander W. Winkler Farbod Farshidian Diego Pardo Michael Neunert Jonas Buchli
Robot and Automation Letters (RA-L), 2017
(www.awinkler.me)
(ZMP)
(Capture Point)
Trotting
Push recovery
Walking
Pacing
Bounding
(Capture Point)
Single Formulation/Planner
Motivation
Alexander W. Winkler et al.
M. Kalakrishnan et al, “Learning, planning, and control for quadruped locomotion over challenging terrain,” IJRR, 2010
J. Pratt et al, “Capture point: A step toward humanoid push recovery,” in Humanoids, 2006.
Single Formulation/Planner
Alexander W. Winkler et al.
M. Kalakrishnan et al, “Learning, planning, and control for quadruped locomotion over challenging terrain,” IJRR, 2010
J. Pratt et al, “Capture point: A step toward humanoid push recovery,” in Humanoids, 2006.
Youtube: "animal gaits for animators"
Trajectory Optimization
given initial state
dynamic Model
Path Constraints
Desired Final State
Objective
Alexander W. Winkler et al.
OPtimization Variables
Alexander W. Winkler et al.
Dynamic Consistency
Linear Inverted Pendulum Model

S. Kajita et al, “Biped walking pattern generation by using preview control of zero-moment point,” IEEE International Conference on Robotics and Automation, 2003.
Alexander W. Winkler et al.


foothold
change
Alexander W. Winkler et al.
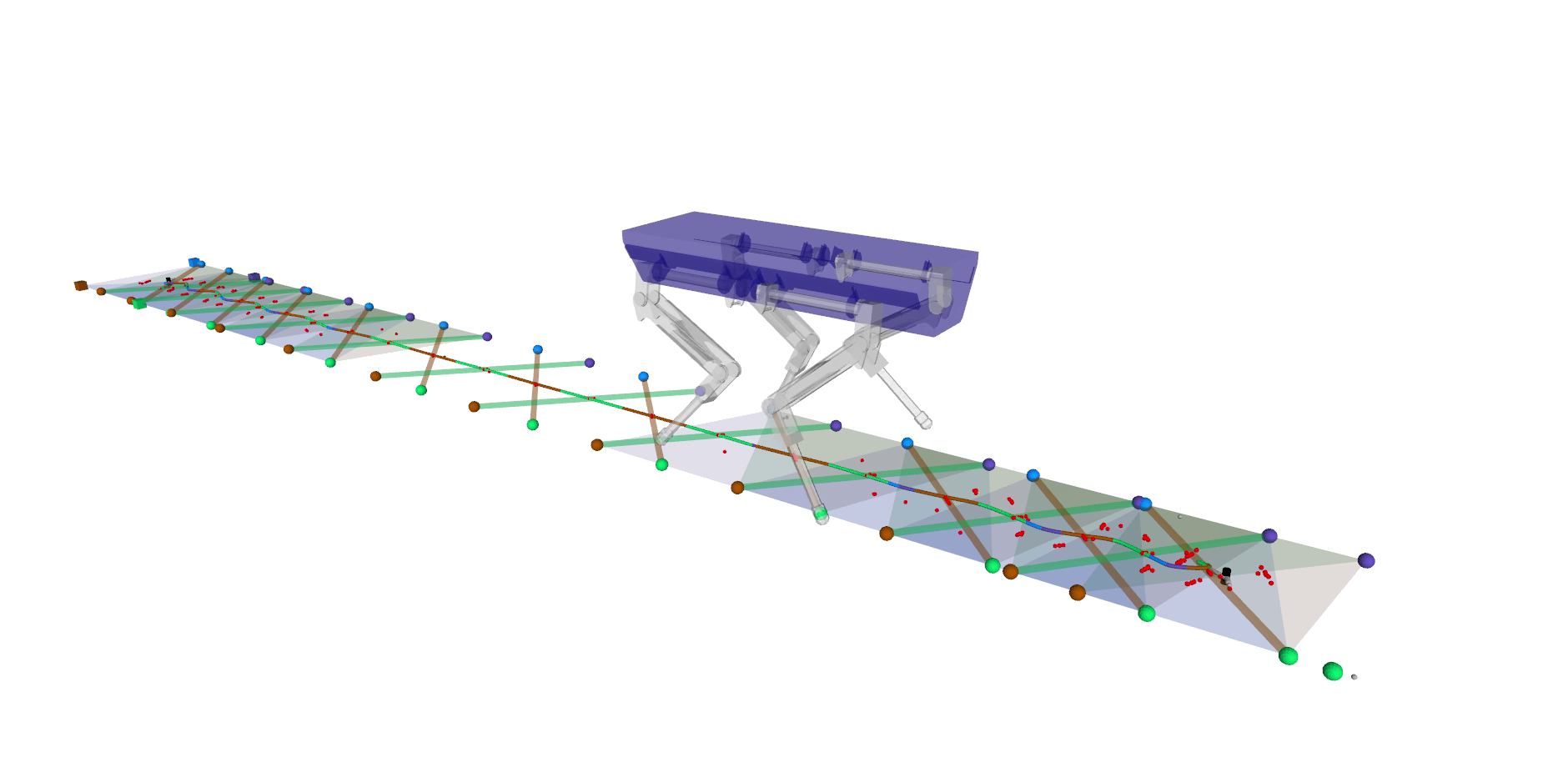
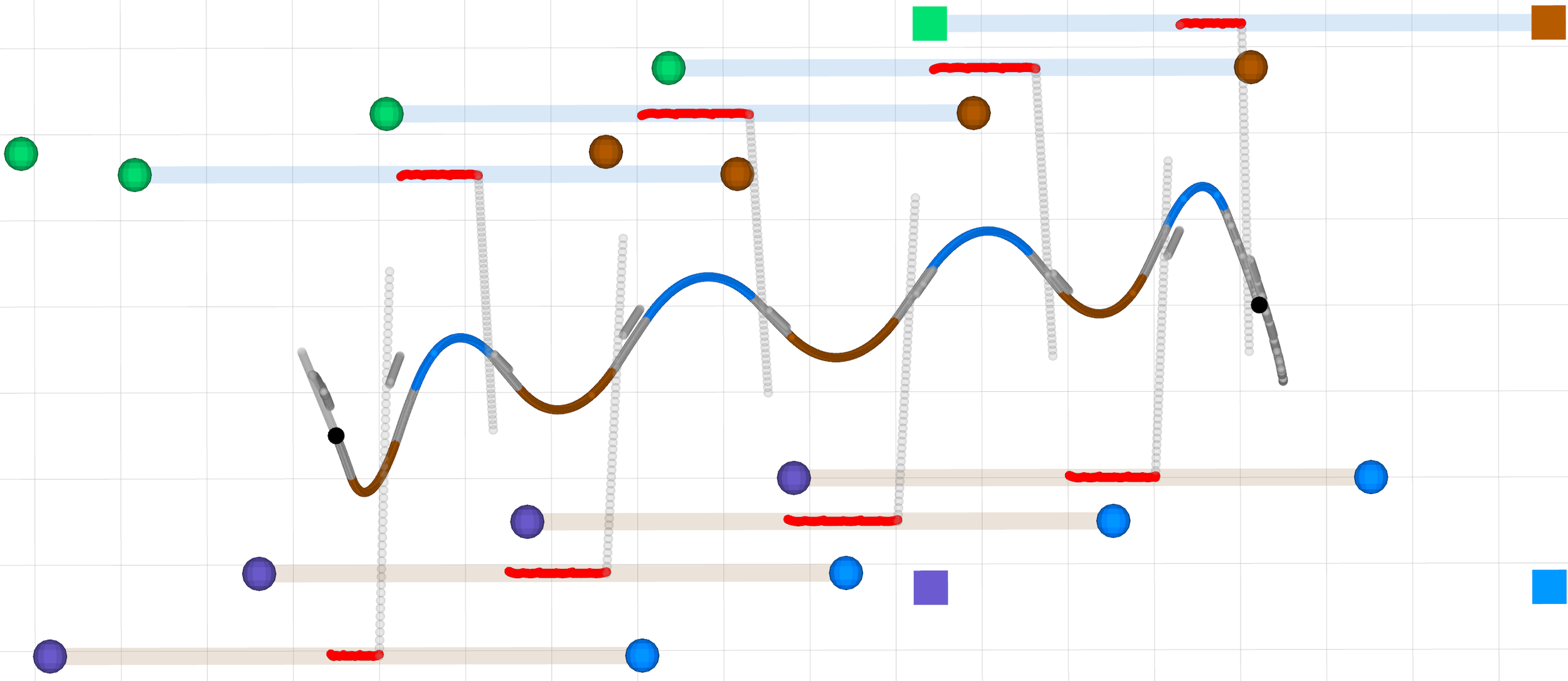
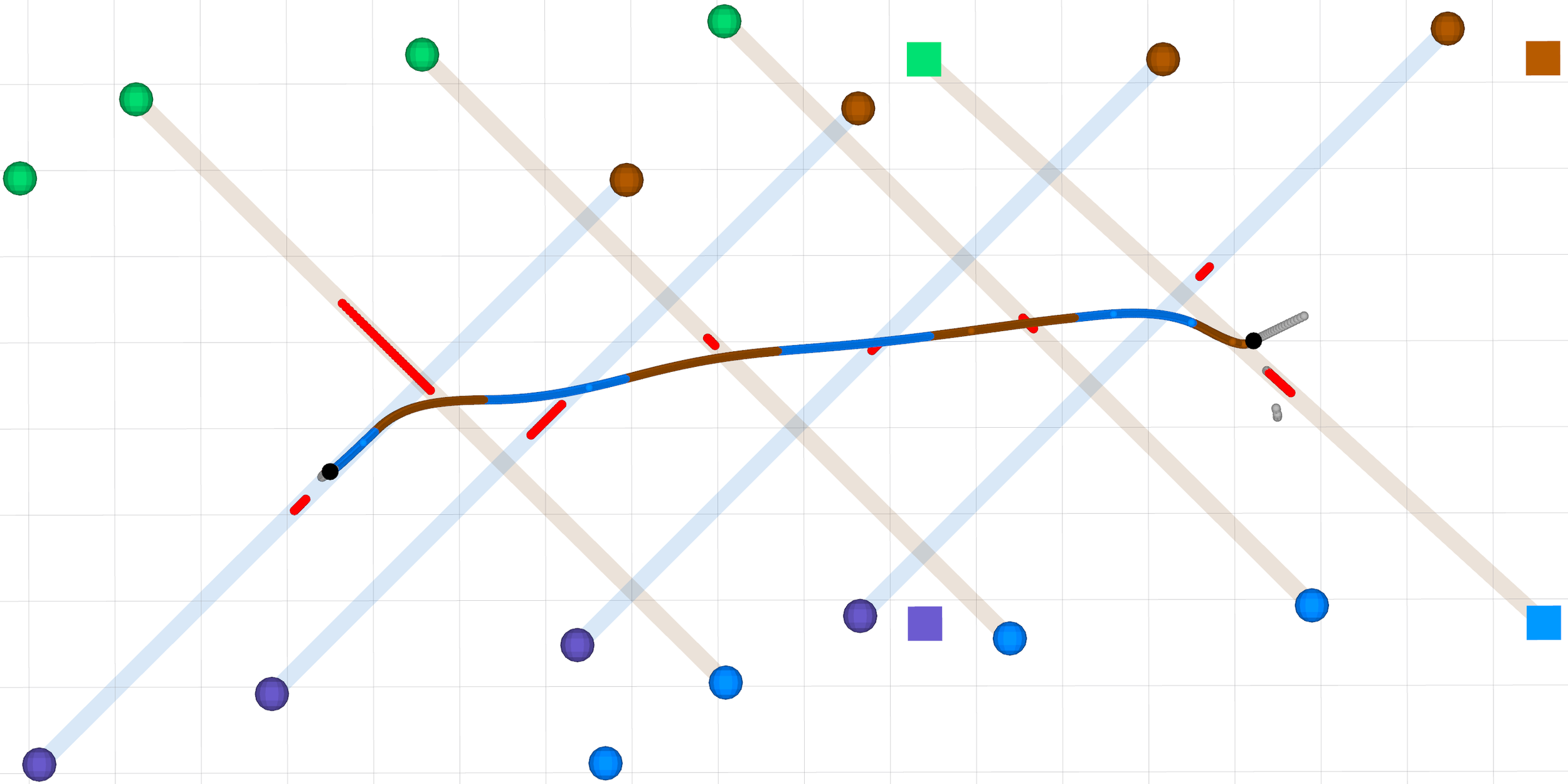
Simultaneous Base and Feet Optimization
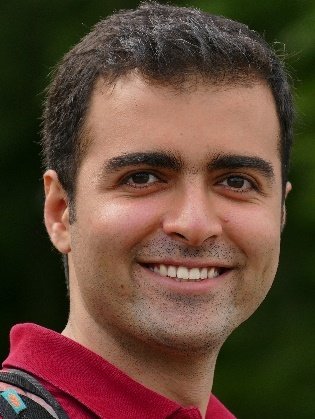
Unilateral Contact Forces


Unilateral Contact Forces CoP inside Support-Area
M. Kalakrishnan et al, “Learning, planning, and control for quadruped locomotion over challenging terrain,” IJRR, 2010
Alexander W. Winkler et al.
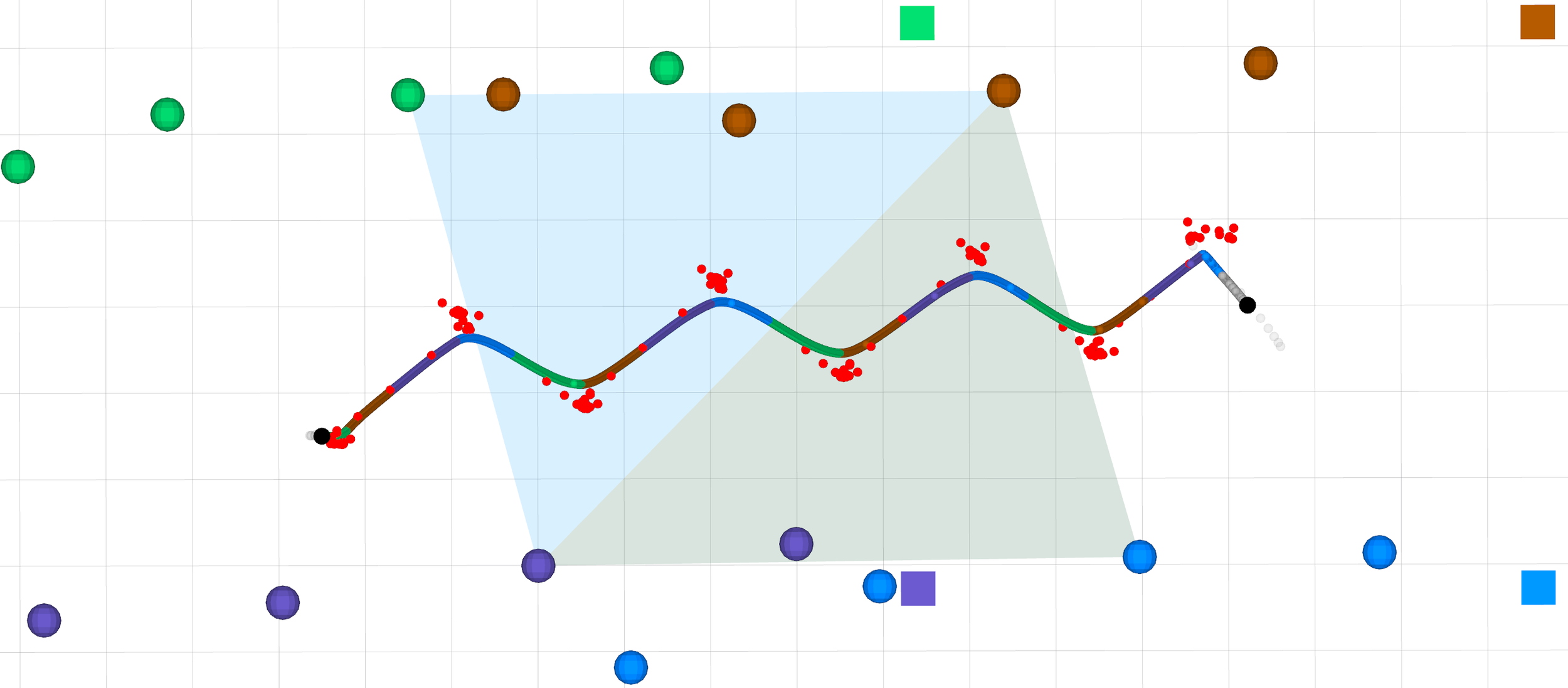
- Cannot represent single point-contacts or lines
- Heuristic expansion of points or lines into areas
- Ordering of contact points necessary.
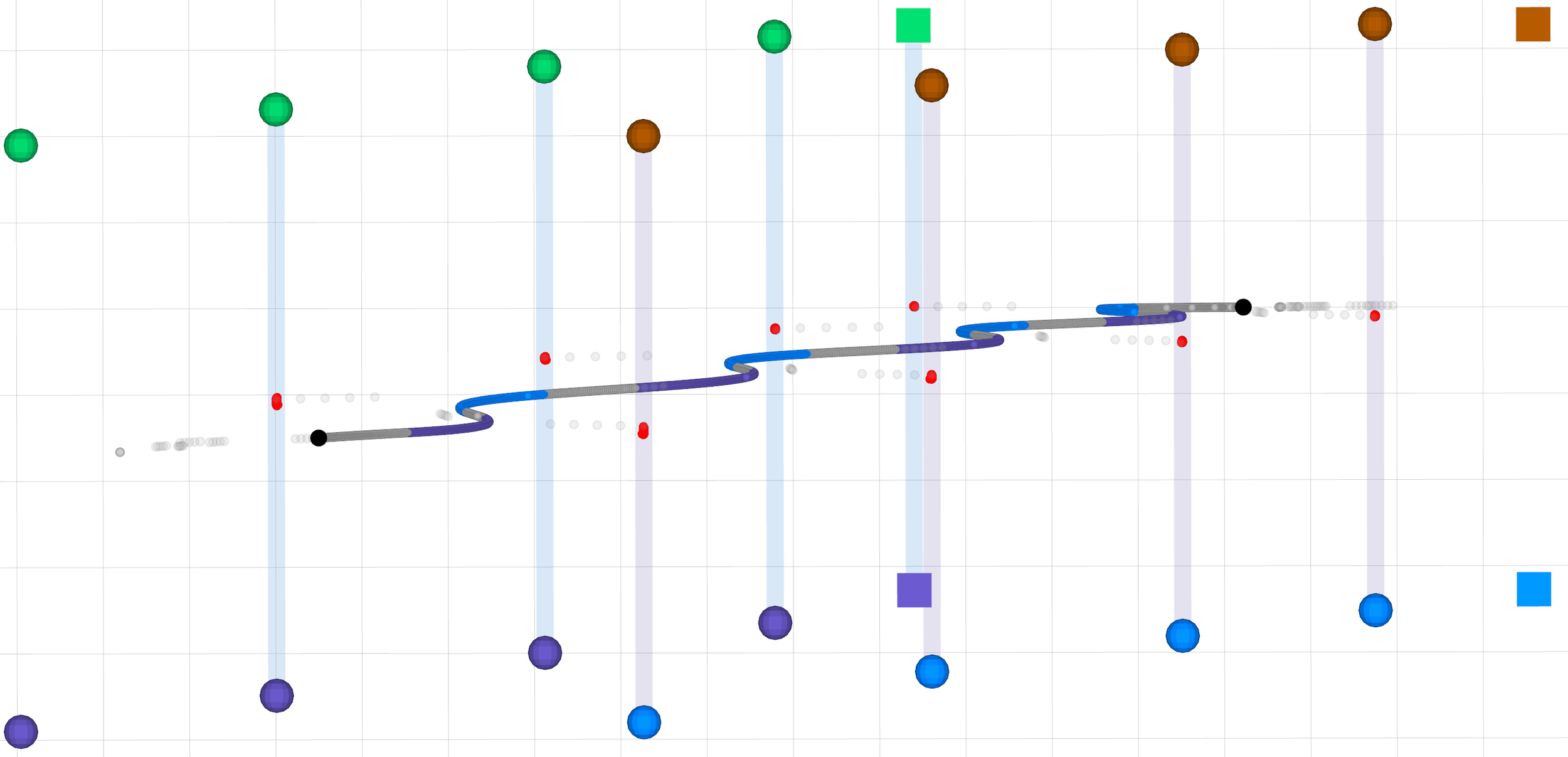
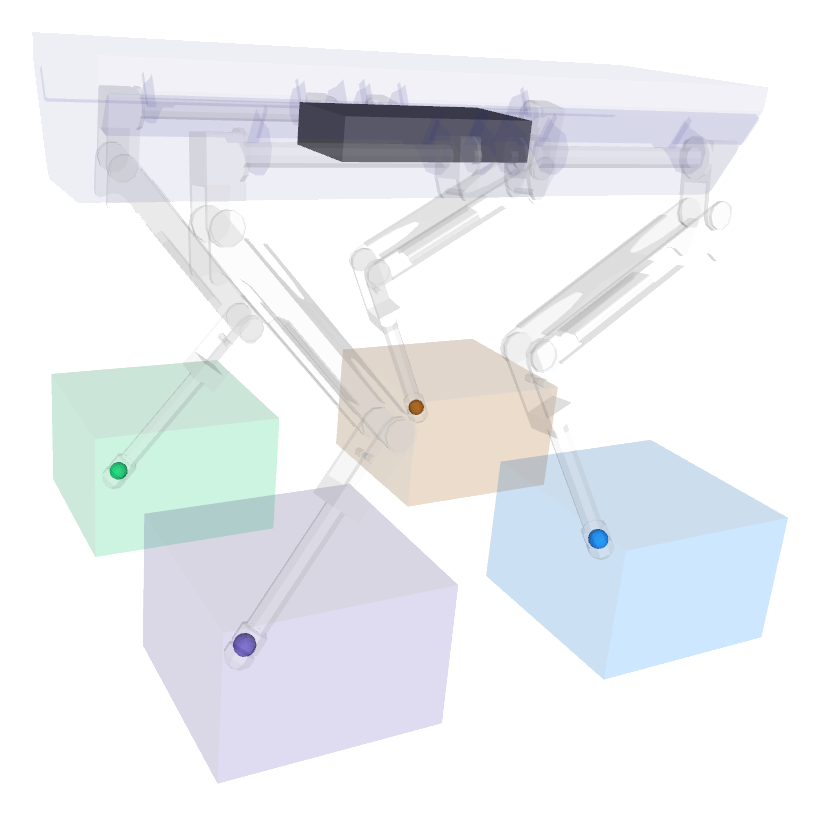
Vertex-Based Zmp-Constraint Formulation
Alexander W. Winkler et al.
Future Work
(under review for ICRA/RAL 2018)




F. Farshidian
D. Pardo
M. Neunert
J. Buchli
A. Winkler
Paper, Video and Presentation: www.awinkler.me
Reduce heuristics by simultaneously optimizing over body motion and footholds
Vertex-based ZMP-constraint formulation allows to uniformly handle point-, line- and area-contacts
Take-Away MSGs
Walk
Trot
Bound
Pace
Alexander W. Winkler et al.
Kinematic Range
kinematic Range:
Alexander W. Winkler et al.
Robust Motions


"If possible, Avoid The Extremes"
Alexander W. Winkler et al.

Biped with non-point-feet:
Generating Torques to Track the Optimized Motion

[1] F. Aghili, “A unified approach for inverse and direct dynamics of constrained multibody systems based on linear projection operator: Applications to control and simulation,” IEEE T-RO, 2005.
[2] M. Mistry, J. Buchli, and S. Schaal, “Inverse dynamics control of floating base systems using orthogonal decomposition,” IEEE ICRA, 2010
Cartesian \(\to\) Joint:
Joint+Contacts \(\to\) Torque \(^{[1,2]}\):