PHYSICS SIMULATION
PHYSICS SIMULATION
PHYSICS SIMULATION
Real Time Rigid Body Simulation on GPUs
Real Time Rigid Body Simulation on GPUs
CRISTIANO SANTOS & TÉRCIO SOUZA
RIGID BODY SIMULATION
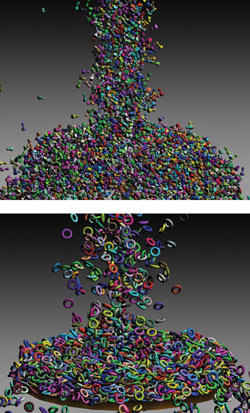
- FÁCIL PARA UM OBJETO
- CONSIDERANDO MILHARES ...
- PODER COMPUTACIONAL
MOVIMENTO
MOVIMENTO
TRANSLAÇÃO E ROTAÇÃO

TRANSLAÇÃO
FORÇA F ATUANDO NO CORPO

VELOCIDADE v DO CENTRO DE MASSA

VELOCIDADE PELA POSIÇÃO x

ROTAÇÃO
VARIAÇÃO CAUSADA PELA FORÇA F
VELOCIDADE ANGULAR w
INÉRCIA ROTACIONAL


COMO ARMAZENAR A ORIENTAÇÃO DA ROTAÇÃO?
COMO ARMAZENAR A ORIENTAÇÃO DA ROTAÇÃO?
ROTAÇÃO
- QUATÉRNIO: q = [s, vx , vy , vz ]
- VARIAÇÃO DO QUATÉRNIO q COM VELOCIDADE ANGULAR w

ROTAÇÃO
- QUATÉRNIO NO TEMPO (t + dt)

SHAPE REPRESENTATION
DETECÇÃO DE COLISÃO NÃO É BASEADA NOS POLIGONOS
SHAPE REPRESENTATION
- REPRESENTAÇÃO POR IDÊNTICAS PARTÍCULAS ESFÉRICAS
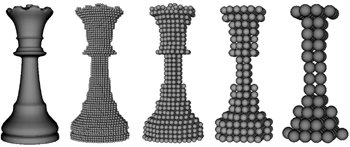
- VOXEL
- RAIOS INTERAGINDO COM A MALHA

DEPTH PEELING
DEPTH PEELING
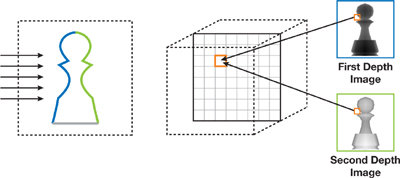
- EXTRAÇÃO DE IMAGENS
- PROJEÇÃO ORTOGRÁFICA
- FRAGMENT SHADER
COLLISION DETECTION
COLLISION DETECTION
- BASEADO NA DISTÂNCIA ENTRE PARTÍCULAS
- DIÂMETRO DA PARTÍCULA
- VELOCIDADE DA SIMULAÇÃO
- ACURÁCIA
COLLISION DETECTION
- GRID UNIFORME TRIDIMENSIONAL
- REDUÇÃO DA CARGA COMPUTACIONAL
- DOMÍNIO COMPUTACIONAL DIVIDIDO EM VOXEL
- ÍNDICE DO VOXEL: g = (gx, gy, gz) DE UMA PARTÍCULA
p = (px, py, pz)

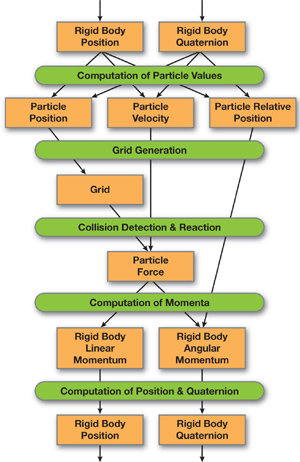
RIGID BODY SIMULATION ON GPU
APLICAÇÕES
Copy of PHYSICS SIMULATION
By terciodejesus



