OUR ROADMAP TO USEFUL ROBOTICS

HELLO!
Ugo Cupcic - Chief Technical Architect
-
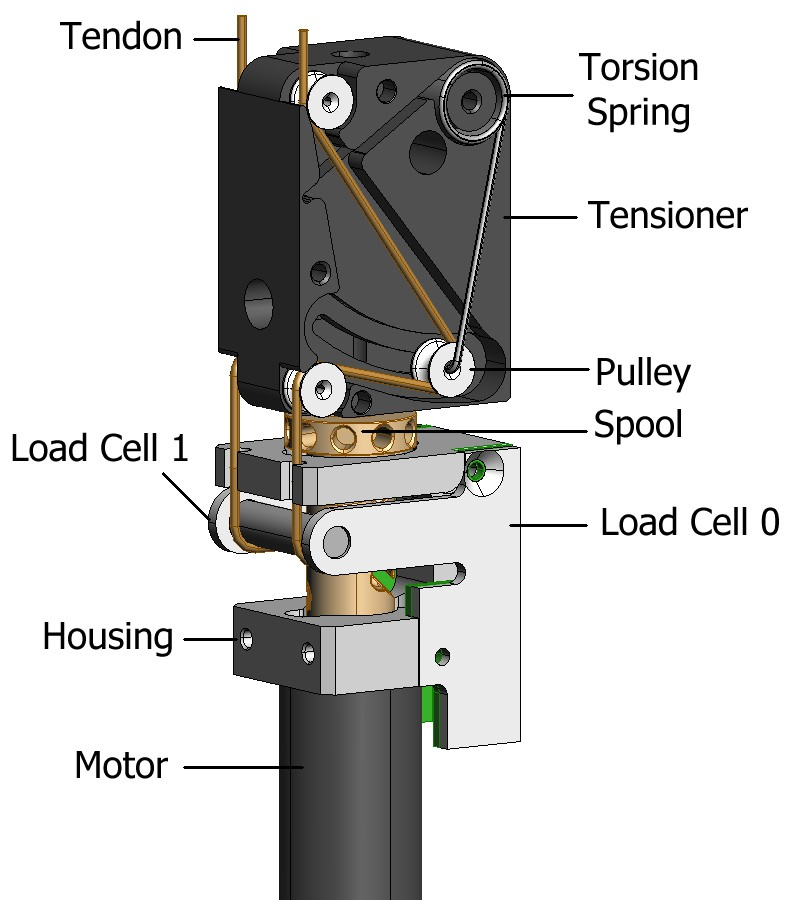
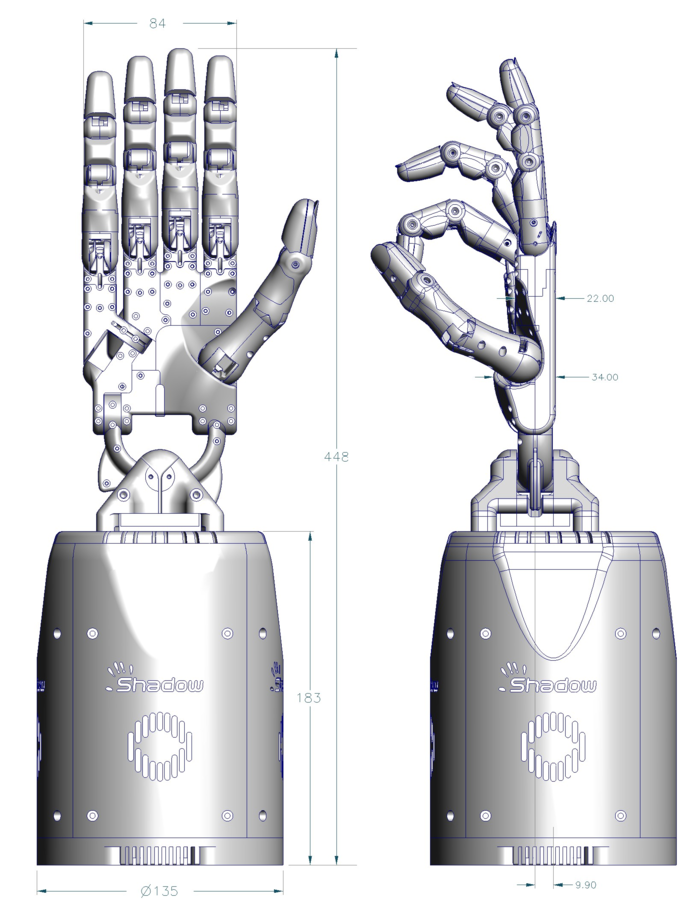
A complex product
-
Making it more useful
-
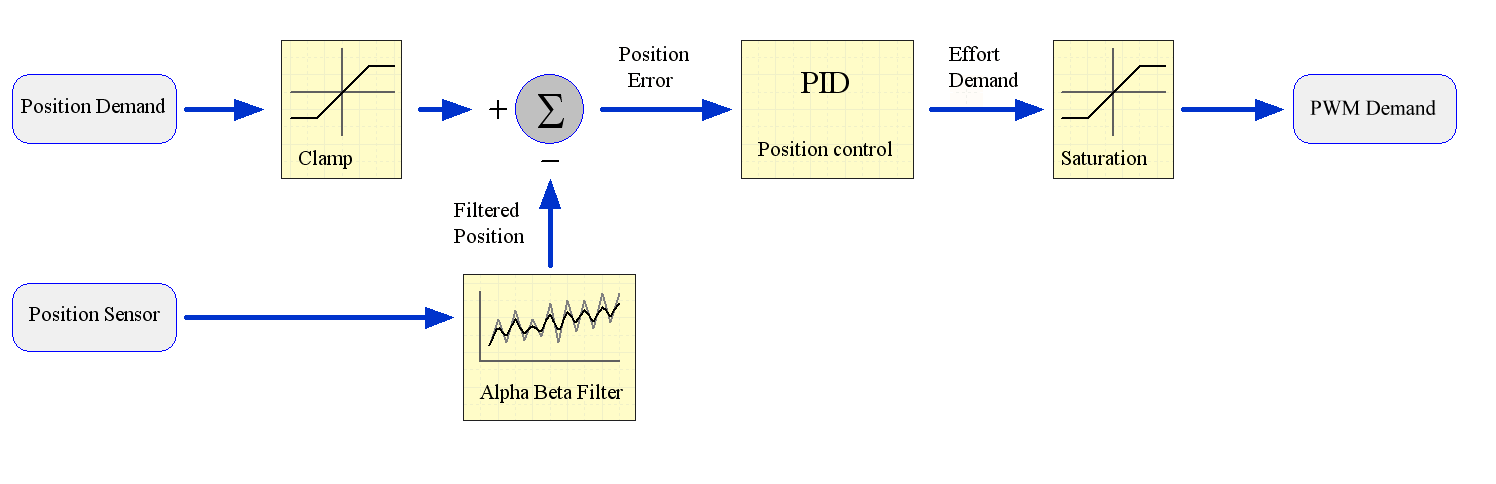
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper



1987 -> 2016


Manipulation / Autonomous Grasping / High Level UI
GSC
CAPABILITY GAP

-
A complex product
-
Making it more useful
-
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper
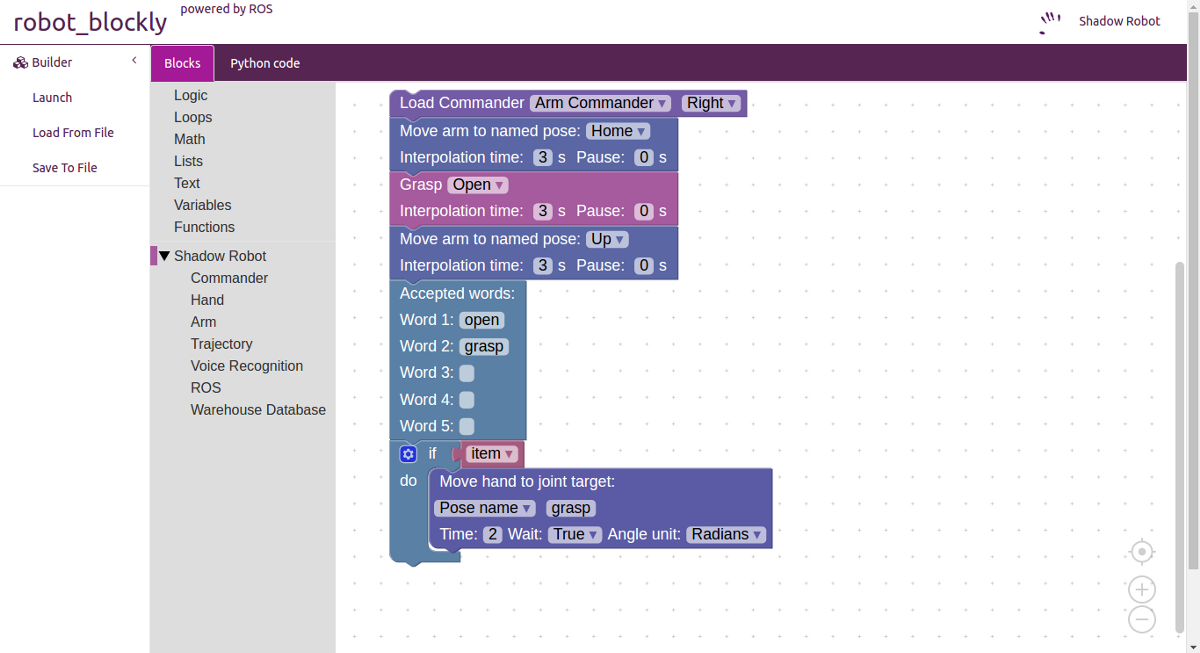
A simple yet powerful UI
-
A complex product
-
Making it more useful
-
Going deeper
-
A complex product
-
Making it more useful
-
Going deeper
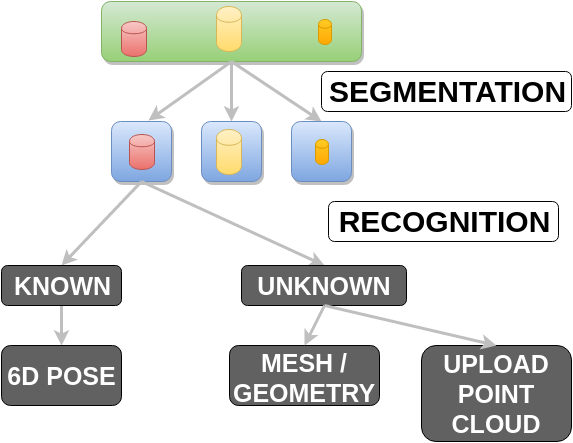
VISION PIPELINE - ROBOT
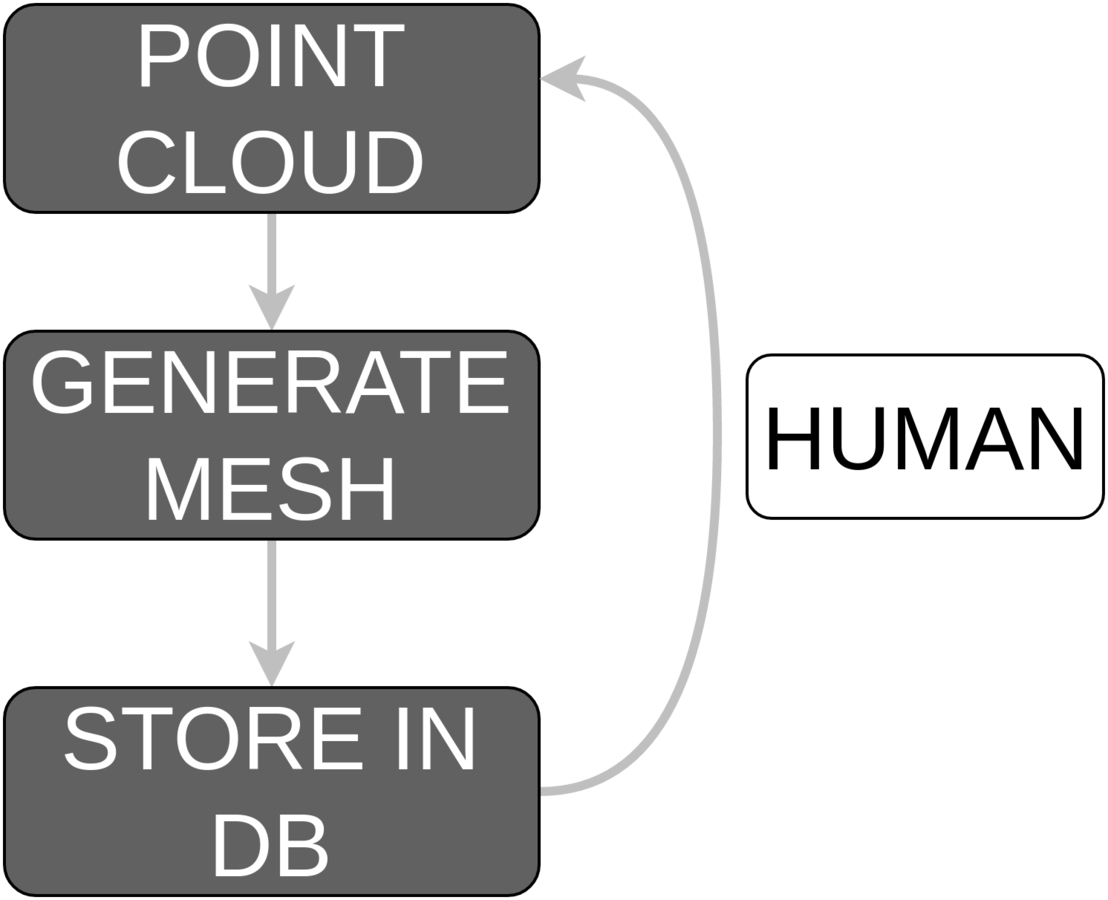
VISION PIPELINE - CLOUD
GRASPING - INSPIRATION
Optimal Control with Learned Local Models: Application to Dexterous Manipulation
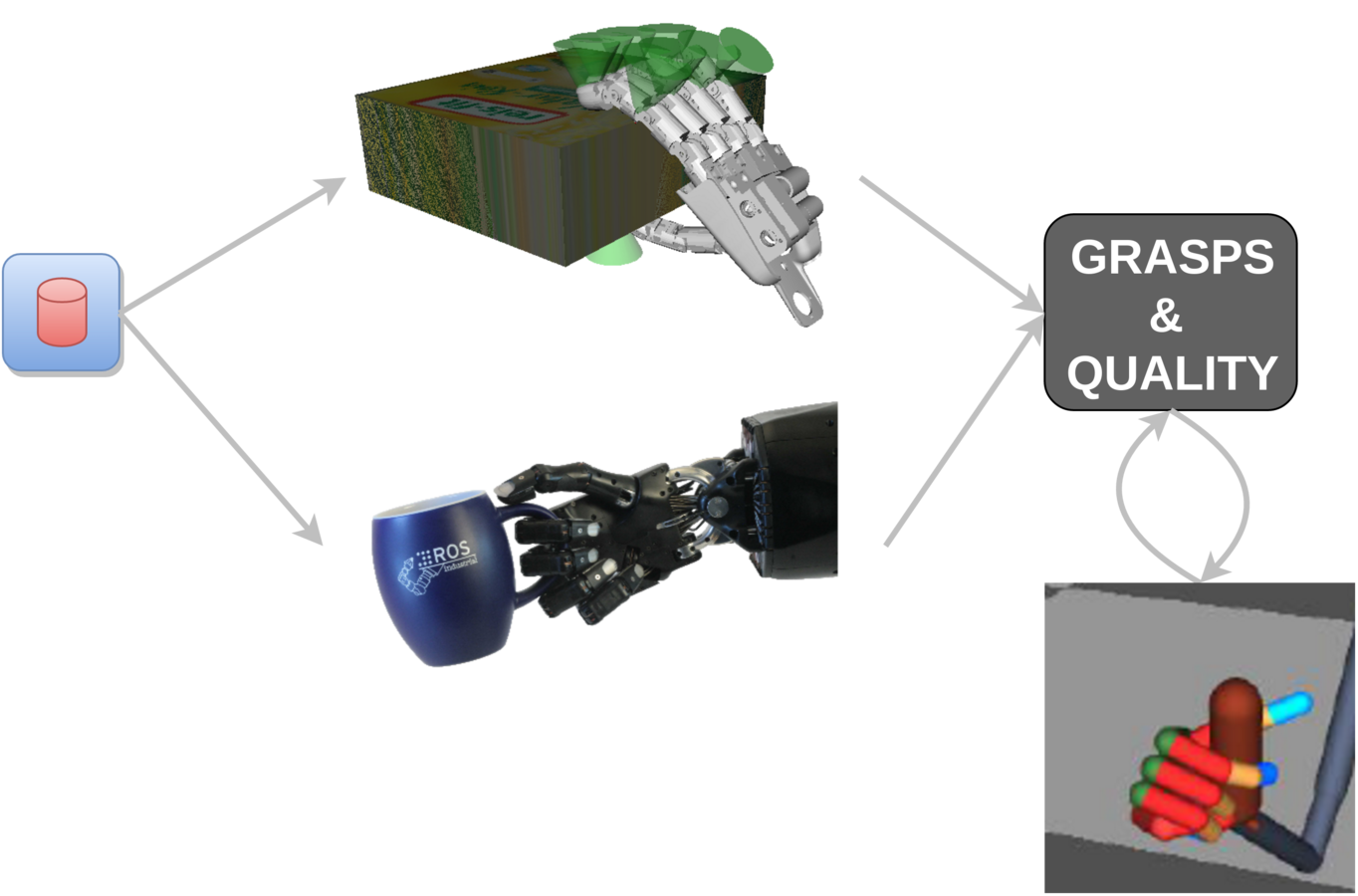
GRASP PIPELINE - ROBOT
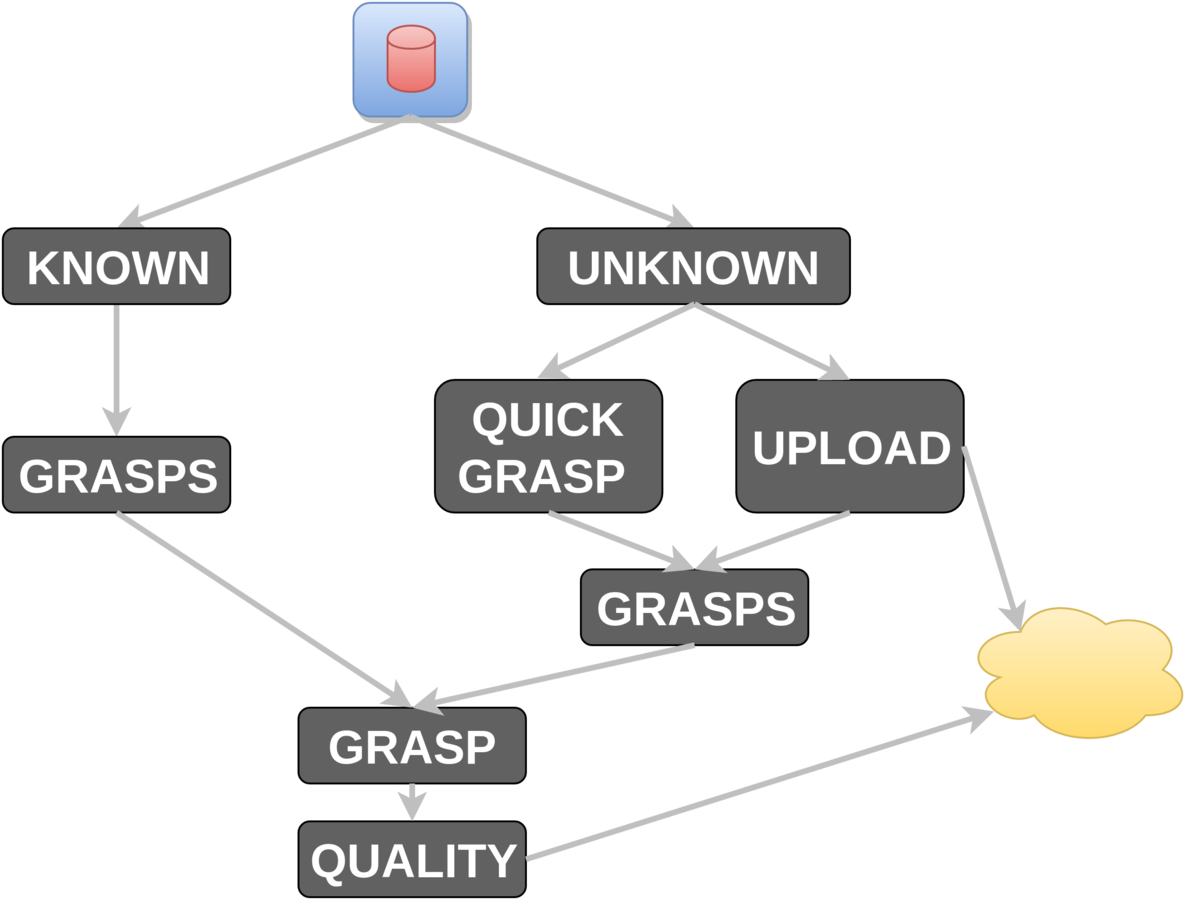
GRASP PIPELINE - CLOUD
QUICK GRASP
Guillaume Walck - Bielefeld
GRASP QUALITY
-
A complex product
-
Making it more useful
-
Going deeper
THANKS!
We're hiring! - ugo@shadowrobot.com