AULA 30
Processamento Digital + Revisão
Prof. Dr. Adenauer G. CASALI
09 de Setembro de 2024
Conteúdo da Aula
Processamento Digital de sinais de tempo contínuo

AULA 30
AULA 29


Exemplos
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Processamento digital de sinais de tempo contínuo
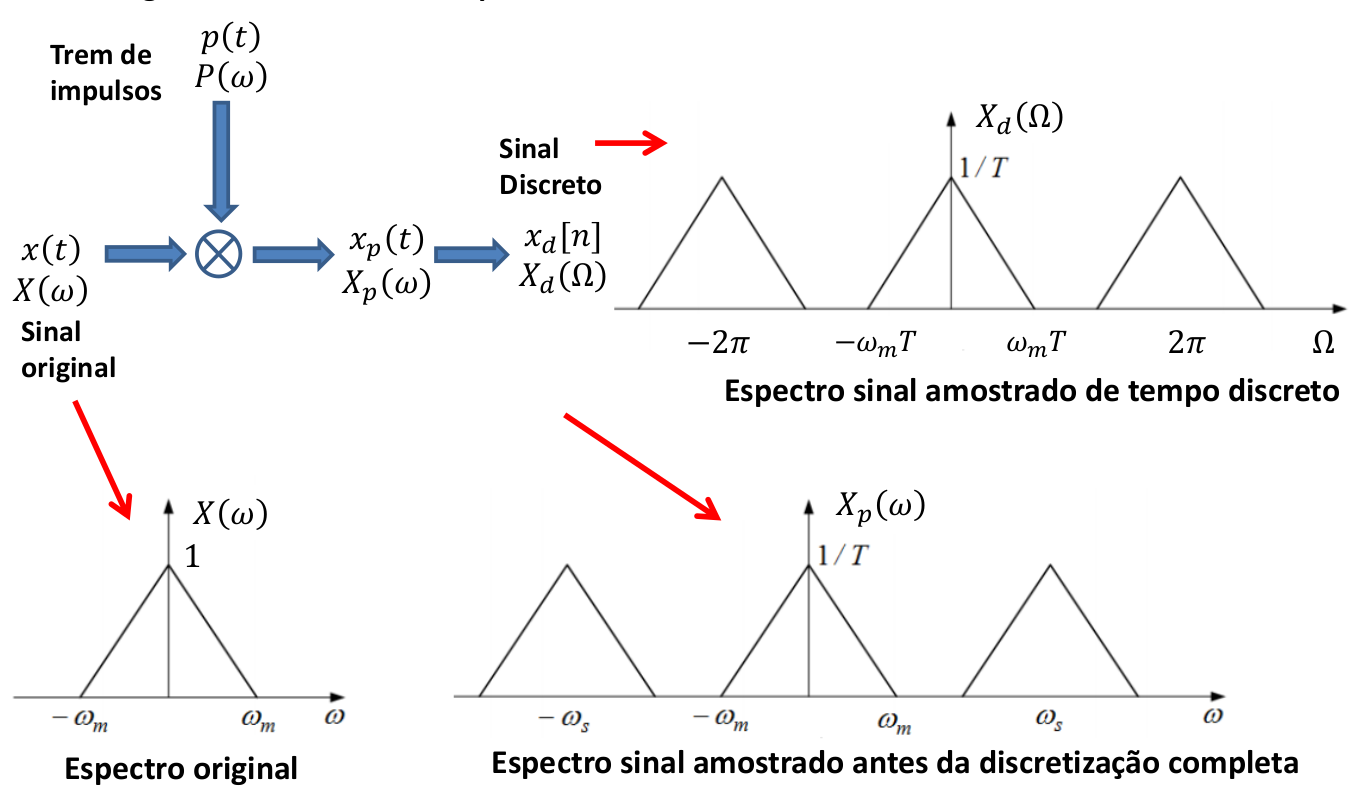
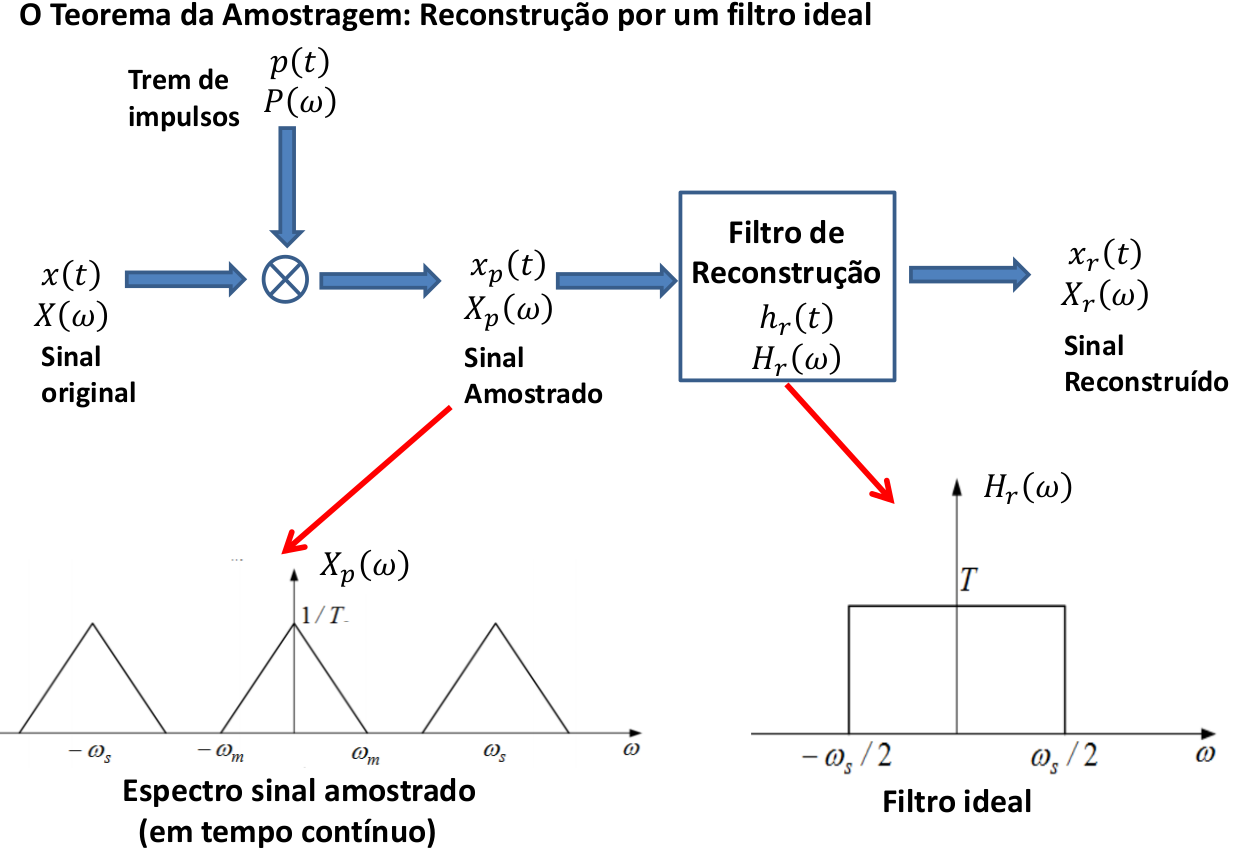
O Teorema da Amostragem permite que tracemos as bases matemáticas de como pode ser processado, em tempo discreto, um sinal de tempo contínuo.
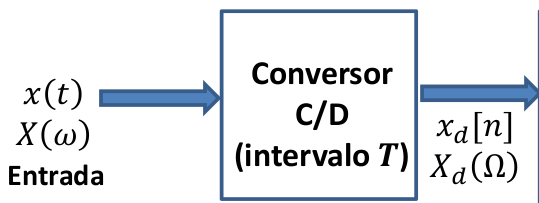
Ingrediente 1: o conversor C/D (contínuo para discreto)
Parâmetro: T (intervalo de amostragem)
Conversor C/D
(intervalo T)
Filtro anti-aliasing
(se necessário)
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplos
(possivelmente após
filtro anti-aliasing)
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
O Teorema da Amostragem permite que tracemos as bases matemáticas de como pode ser processado, em tempo discreto, um sinal de tempo contínuo.
Ingrediente 2: o sistema digital (filtro de tempo discreto)
Parâmetro:
Como determinar
Sistema de Tempo Discreto
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
O Teorema da Amostragem permite que tracemos as bases matemáticas de como pode ser processado, em tempo discreto, um sinal de tempo contínuo.
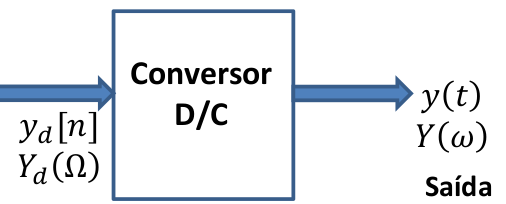
Ingrediente 3: o conversor D/C (discreto para contínuo)
Parâmetro:
Conversor D/C
Filtro de reconstrução ideal:
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Reconstrução ideal:
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
O Teorema da Amostragem permite que tracemos as bases matemáticas de como pode ser processado, em tempo discreto, um sinal de tempo contínuo.
Parâmetro:
Como determinar ?
Ingrediente 2: o sistema digital (filtro de tempo discreto)
Sistema de Tempo Discreto
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Com reconstrução ideal:
Esquema Geral:
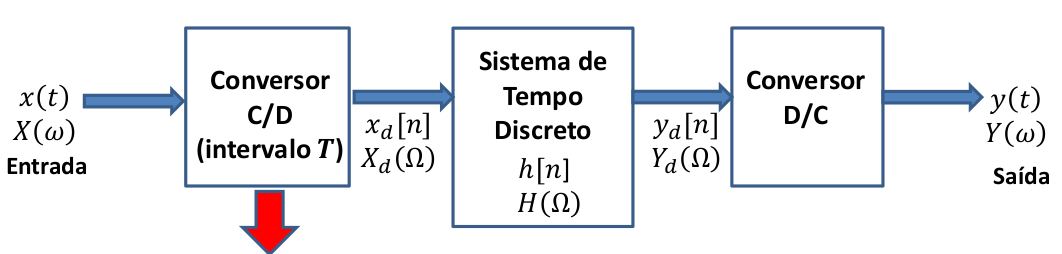
(possivelmente com filtro anti-aliasing)
Idealmente com filtro ideal de ganho T na banda de passagem (caso contrário revisar o filtro digital)
Processamento digital de sinais de tempo contínuo
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
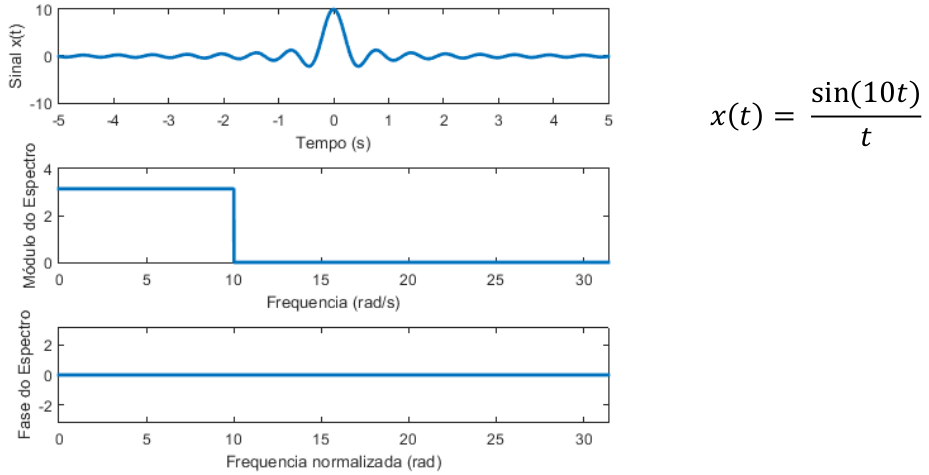
Exemplo: um diferenciador digital
Considere um sinal de tempo contínuo x(t) de banda limitada a .
Projete um sistema de tempo discreto para calcular a derivada deste sinal.
O que queremos?
Qual deve ser o filtro digital?
Filtro diferenciador
(analógico, amplifica altas frequências, elimina componente DC)
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: um diferenciador digital
Considere um sinal de tempo contínuo x(t) de banda limitada a .
Projete um sistema de tempo discreto para calcular a derivada deste sinal.
Por exemplo:
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Por exemplo:
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
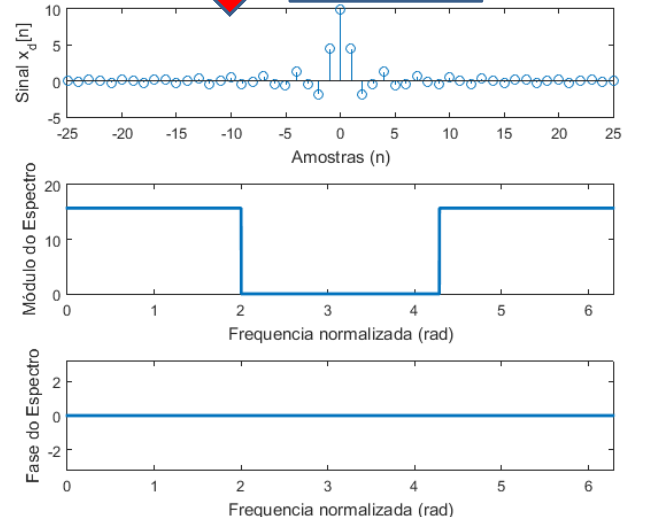
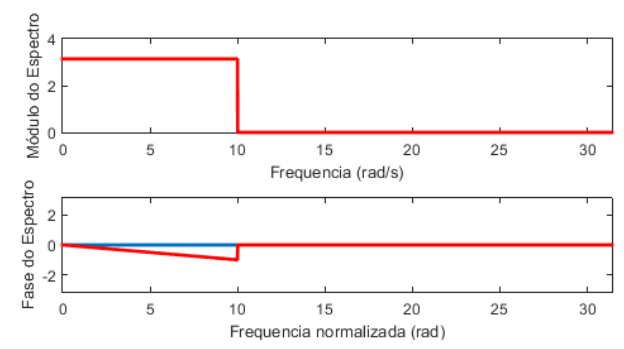
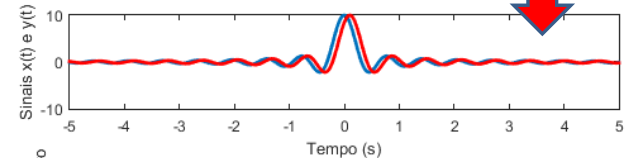
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
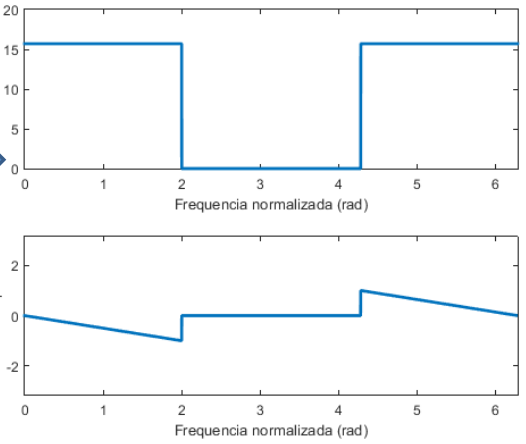
Em tempo discreto, o que faz esse filtro?
Não é um mero "atraso"!
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
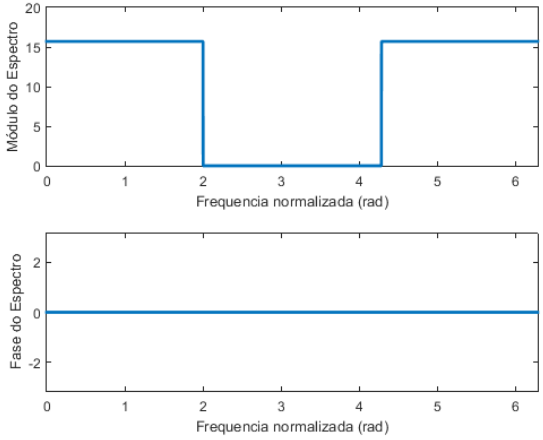
Conversor D/C:
Filtro ideal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
Exemplo: atraso de "meia amostra"
Projete um sistema em tempo discreto que produz um atraso de meia amostra no sinal
Processamento em tempo discreto de sinais contínuos
Exemplos
Conversor C/D
Conversor D/C
Sistema de Tempo Discreto
Processamento Digital
PROCESSAMENTO EM TEMPO DISCRETO DE SINAIS DE TEMPO CONTÍNUO
Exemplo
Conversor D/C
Revisão Final
Conversor C/D
1) Sistemas LIT no Domínio da Frequência
TFTD
TFTD
TFTD
Nesta altura do curso, você certamente já conhece algumas TFs importantes :
Revisão Final
2)Análise de Sistemas LIT no domínio da Frequência
Ação de um sistema LIT no domínio da frequência:
(produto dos módulos)
(soma das fases)
(soma dos módulos em escala logarítmica)
No domínio da frequência, analisar um sistema LIT envolve:
- Analisar a magnitude da sua resposta em frequência
2. Analisar a fase da sua resposta em frequência
informa quais frequências são amplificadas ou reduzidas pelo sistema
Magnitude em decibéis (dB):
informa o atraso/adiantamento produzido pelo filtro em determinada frequência
Atraso de grupo:
Revisão Final
3) Filtros Ideais
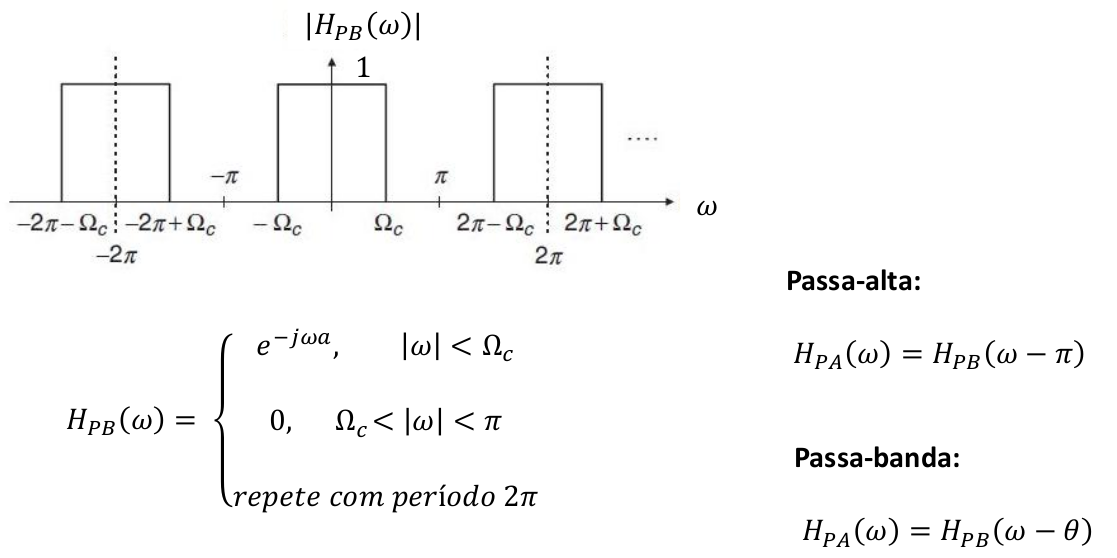
Repete com período
Ideal "passa-baixa"
Todos os outros filtros ideais podem ser construídos a partir deste!
Revisão Final
4) Filtros não ideais
Possíveis polos somente na origem e/ou no infinito
Sistema é sempre ESTÁVEL
em geral tem transições nos máximos mais suaves que filtros IIR da mesma ordem (picos menos definidos, mas com vales mais definidos)
em geral é uma função mais comportada, com fase podendo ser linear ou próxima de linear
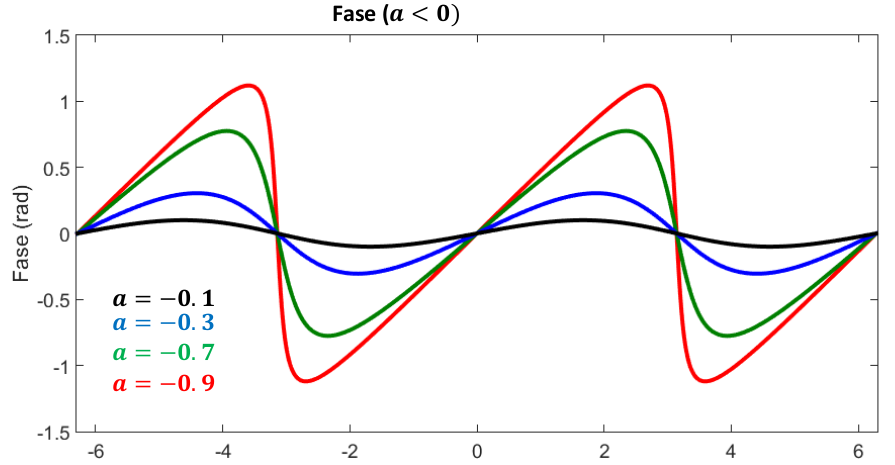
Fase de
Sistema pode não ser ESTÁVEL
em geral tem transições nos máximos mais bruscas que a de filtros FIR de mesma ordem (picos mais definidos, mas com vales menos definidos)
em geral é uma função menos comportada, menos linear que a fase de filtros FIR
FIR
Além da origem e/ou no infinito, possíveis polos também nas raízes do denominador.
IIR
Estabilidade
Polos
Equação de Diferenças
Resposta em Frequência
Revisão Final
5) Análise de Filtros Compostos
Escreva a Resposta em Frequência como o produto de sistemas de ordem inferior
Analise cada sistema individualmente
Esboce os gráficos do sistema composto (somando fases e magnitudes em dB) e analise o sistema composto
Use técnicas de inversão (frações parciais ou derivada em z/Omega) para achar a resposta ao impulso
Revisão Final
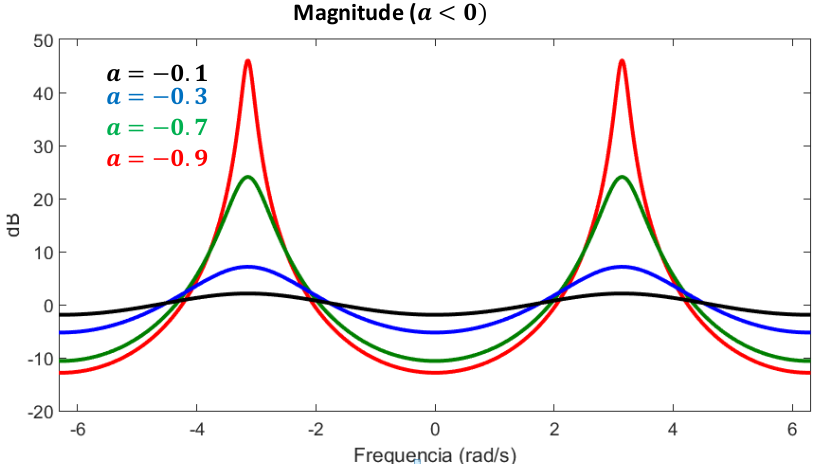
6) IIR de primeira ordem
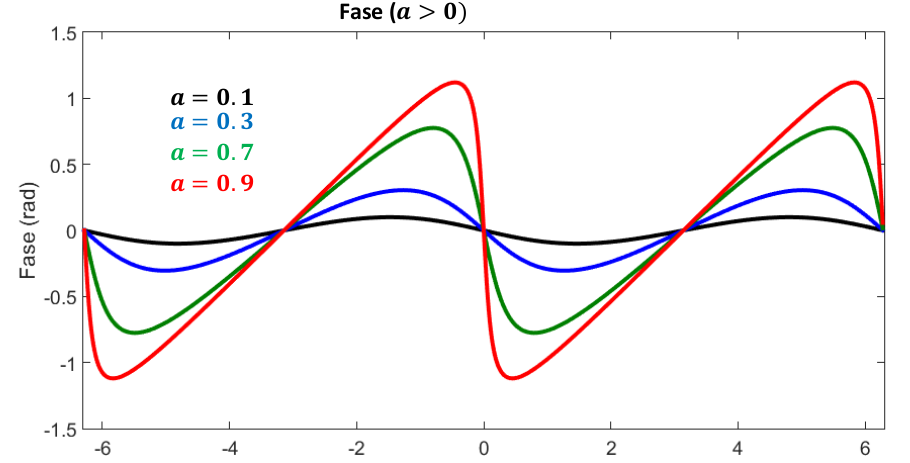
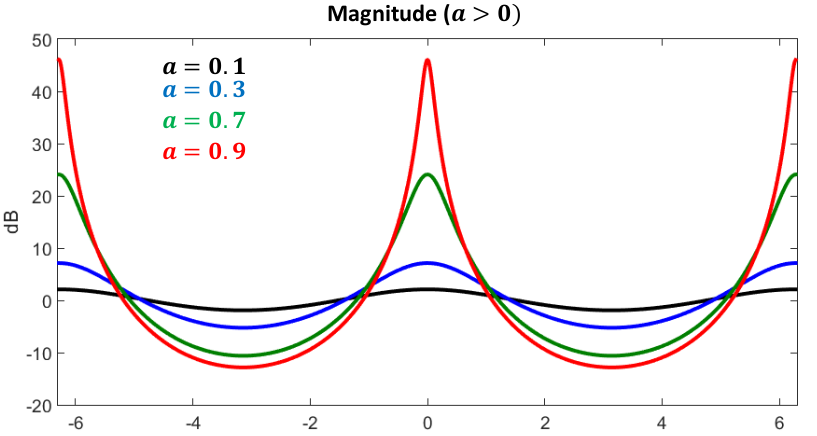
a>0 - Filtro Passa Baixa
a<0 - Filtro Passa Alta
Revisão Final
Extremos da fase em:
7) IIR de segunda ordem
Caso 1:
Se r < 1, o filtro é estável
Neste caso os filtros de primeira ordem estão deslocados do ângulo phi:
Caso 2:
Dois filtros de primeira ordem em série!
Revisão Final
Frequência de passagem
Fator de amortecimento
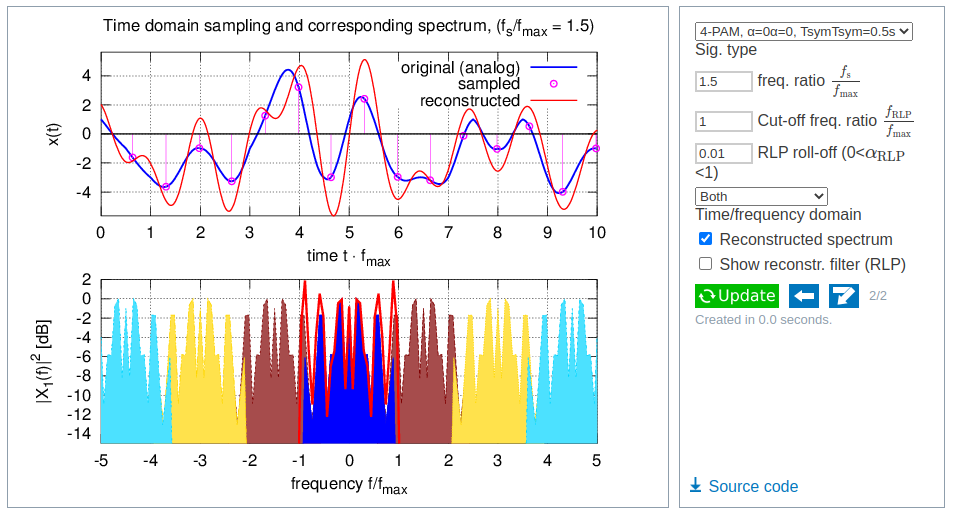
8) Amostragem
Revisão Final
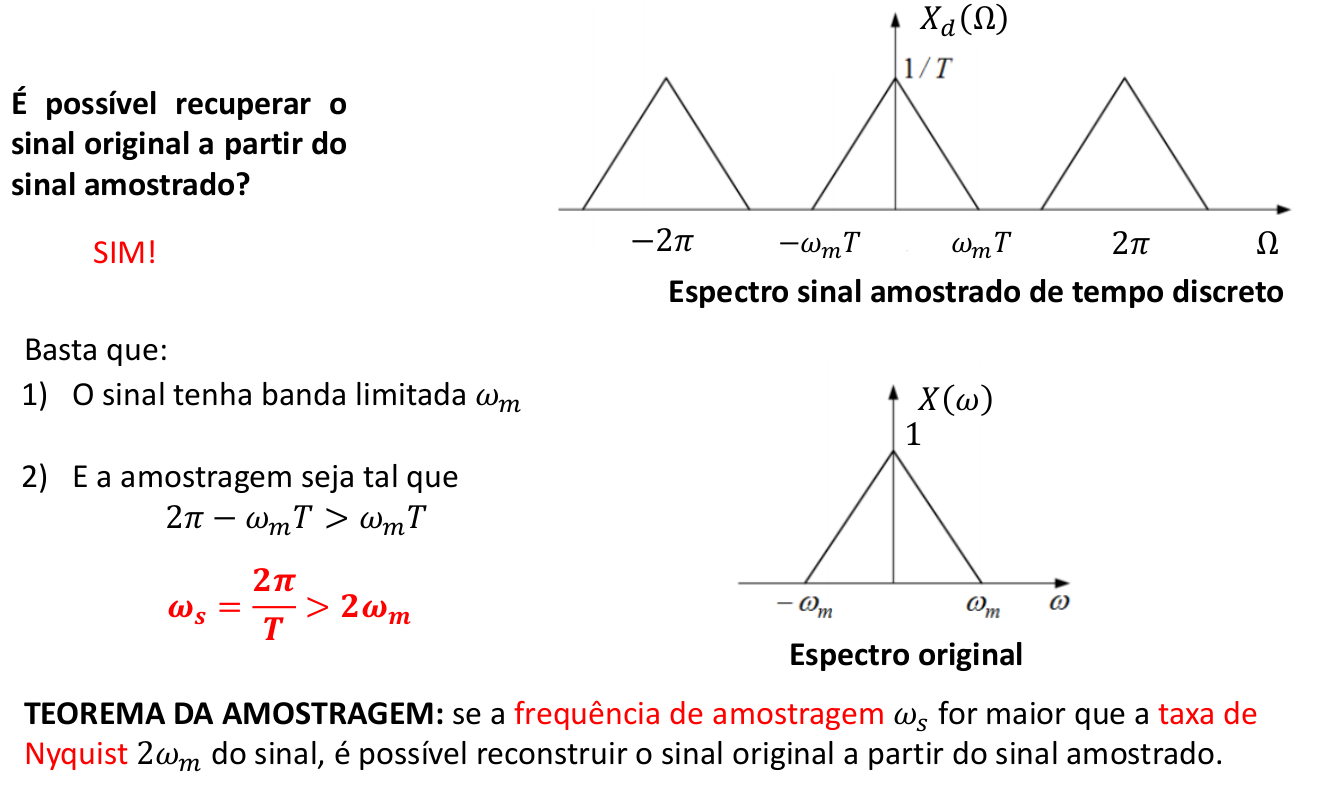
Taxa de Nyquist
8) Amostragem
Revisão Final
8) Amostragem em Tempo Discreto
Revisão Final
Tempo
Frequência
Multiplicar por trem de impulsos com período N (zerar amostras)
Dividir o espectro por 1/N e replicá-lo a cada
Remover N-1 zeros entre as amostras (dizimação)
Multiplicar a frequência por N
Inserir N-1 zeros entre as amostras
Dividir a frequência por N
Interpolar
Usar um filtro de reconstrução passa-baixa
9) Interpolação
Revisão Final
10) Aliasing
Revisão Final
11) Processamento em Tempo Discreto de Sinais de Tempo Contínuo
Revisão Final
(possivelmente com filtro anti-aliasing)
Idealmente com filtro ideal de ganho T na banda de passagem (caso contrário revisar o filtro digital)
12) Algumas aplicações diretas da Teoria de Análise de Sinais
Revisão Final
Técnicas
Científicas
- Análise de Sistemas Compostos
- Projeto de Sistemas Compostos
- Filtragem (remoção de artefatos, seleção de informação, etc)
- Amostragem (subamostragem, sobreamostragem, etc)
- Reconstrução de sinais (interpolação)
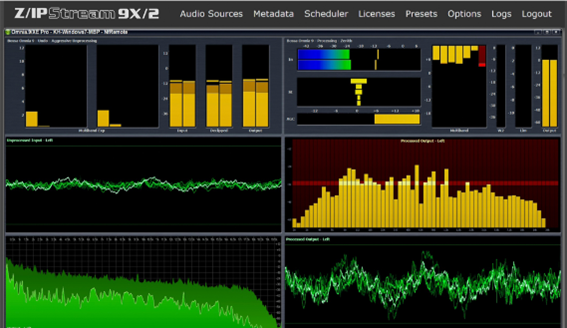
- Bases do processamento digital
- Desenvolvimento de softwares e jogos
- Processamento de imagens
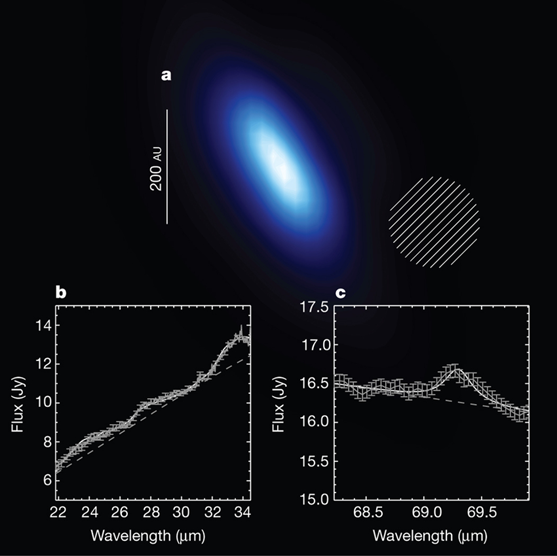
- Inúmeras aplicações da análise espectral (exemplo: diagnóstico médico, estudo de mecanismos fisiológicos, sincronia e conectividade, astrofísica, geologia, ciência dos materiais, meteorologia, etc...)
- Aprendizado de máquina e inteligência artificial (características no domínio da frequência)
- Modelagem linear de sistemas físicos e biológicos
Revisão Final



- Ler a(s) leitura(s) recomendada(s) e slides da aula
- Assistir a(s) vídeo-aula(s) recomendada(s) no Moodle
- Fazer exercício(s) recomendado(s)
Em casa: preparar-se para a aula 30
Próxima Aula
AULA 29
AULA 30

Aula 30 - Revisão Final