The effect of tightening constraints for semidefinite relaxations: A case study
Bernhard Paus Græsdal
RLG Short Talk - Fall 2024



Motivation
Some questions that have been asked in this lab:
- What can you do when the relaxation is loose?
- How much does tightening constraints help?
- What tightening constraints should you add?
Goal for this talk
Provide a simple case study with some empirical answers to these questions
Case-study: Translational Pushing of a Box

Problem formulation
Decision variables:
- \( q^a_t \) finger x-position
- \( q^u_t \) box x-position
- \( u_t \) commanded finger x-position
- \( n_t \) applied normal impulse
Quasi-Dynamic EoMs:

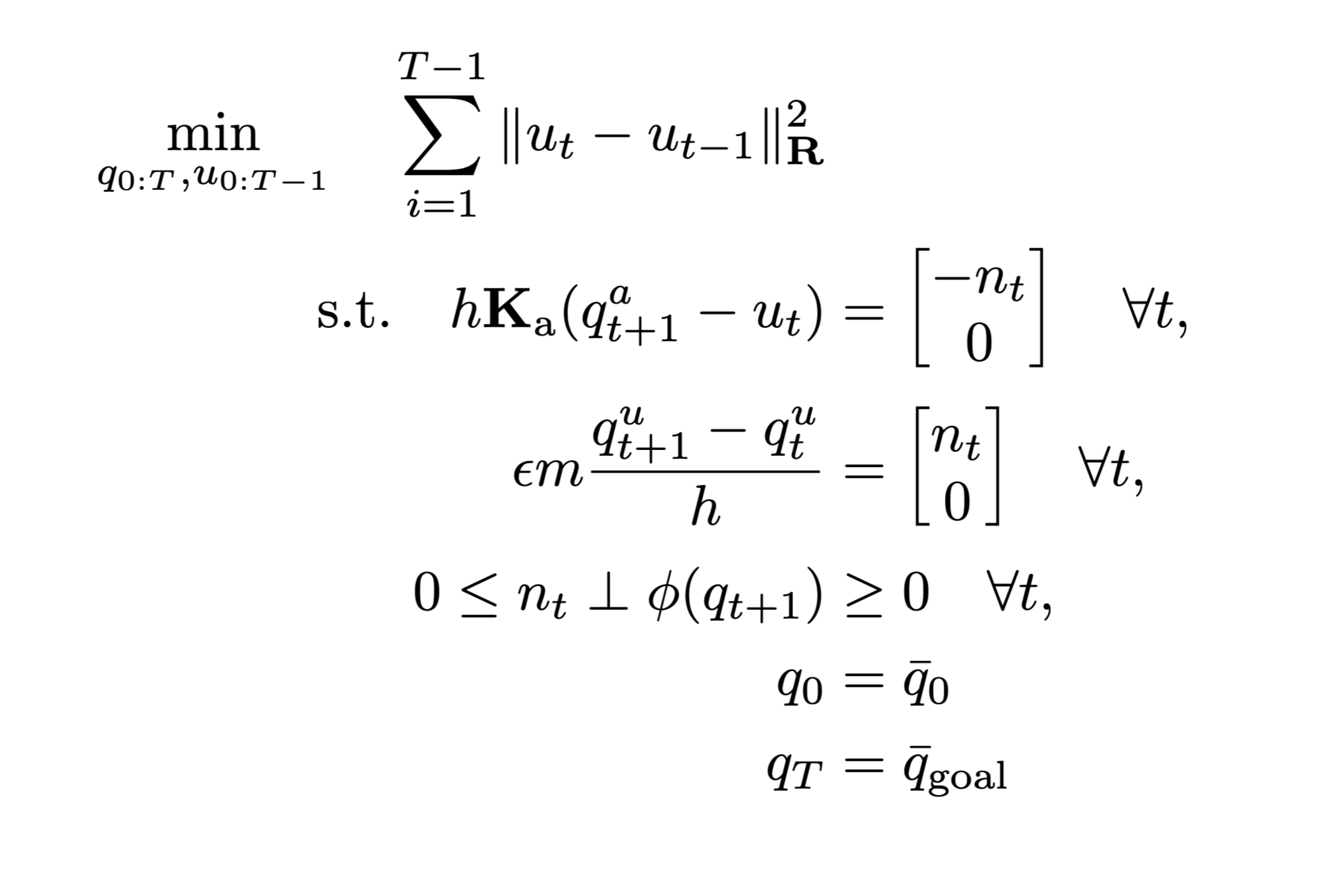
Nonconvex trajectory optimization problem
Nonconvex complementarity constraints!
Optimal solution
Optimal cost:
\( C_\text{opt} = 0.968 \)
For horizon \( T = 10 \)
How to solve the nonconvex trajopt?
Our problem is a QCQP:
Let's get a lower bound by solving a semidefinite relaxation

Attempt 1: Exploit no structure
QCQP
SDR
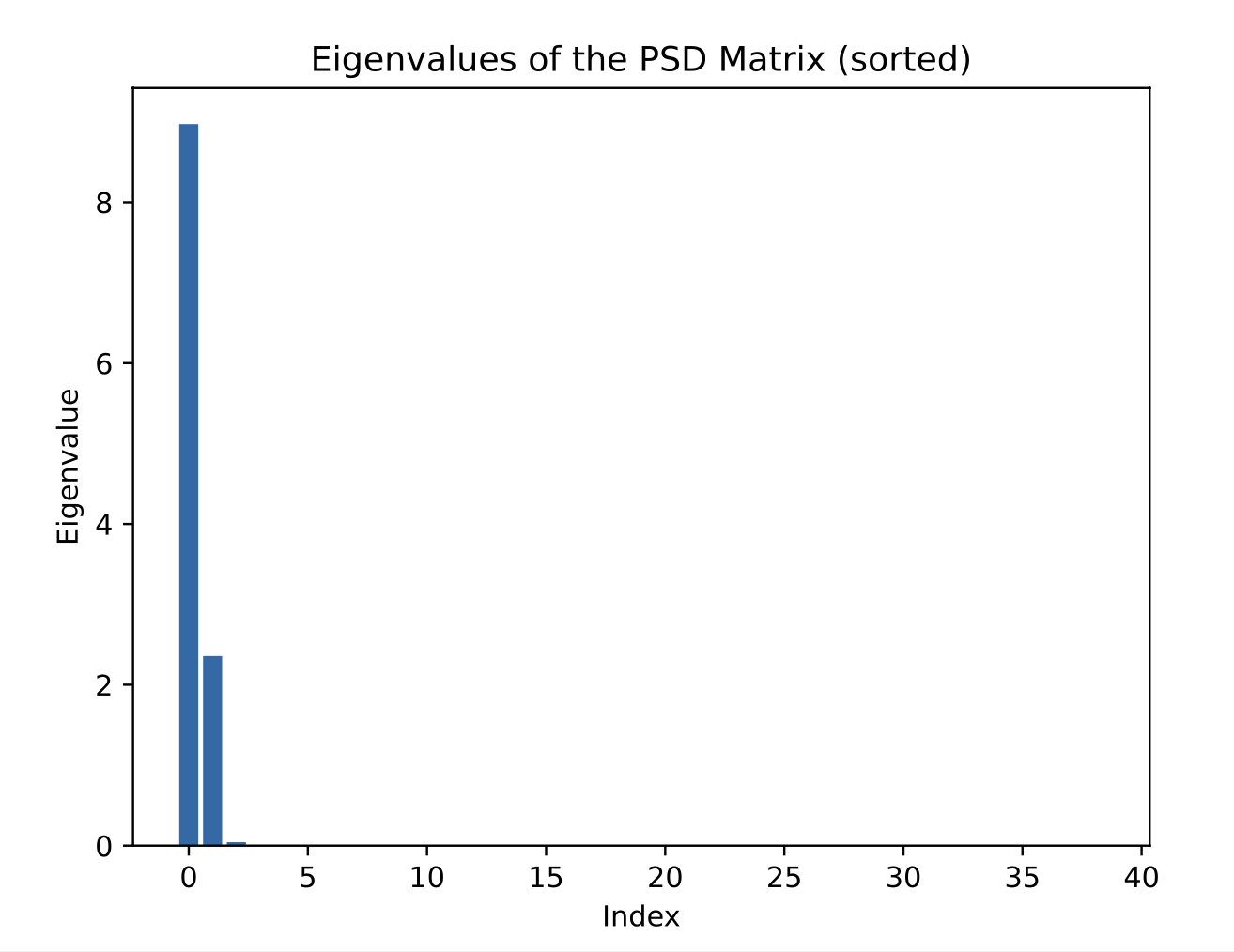
Attempt 1: Result
\( \text{rank}(X) \gg 1 \)
\( C_\text{relaxed} = 0.1 \)
\( C_\text{opt} = 0.968 \)
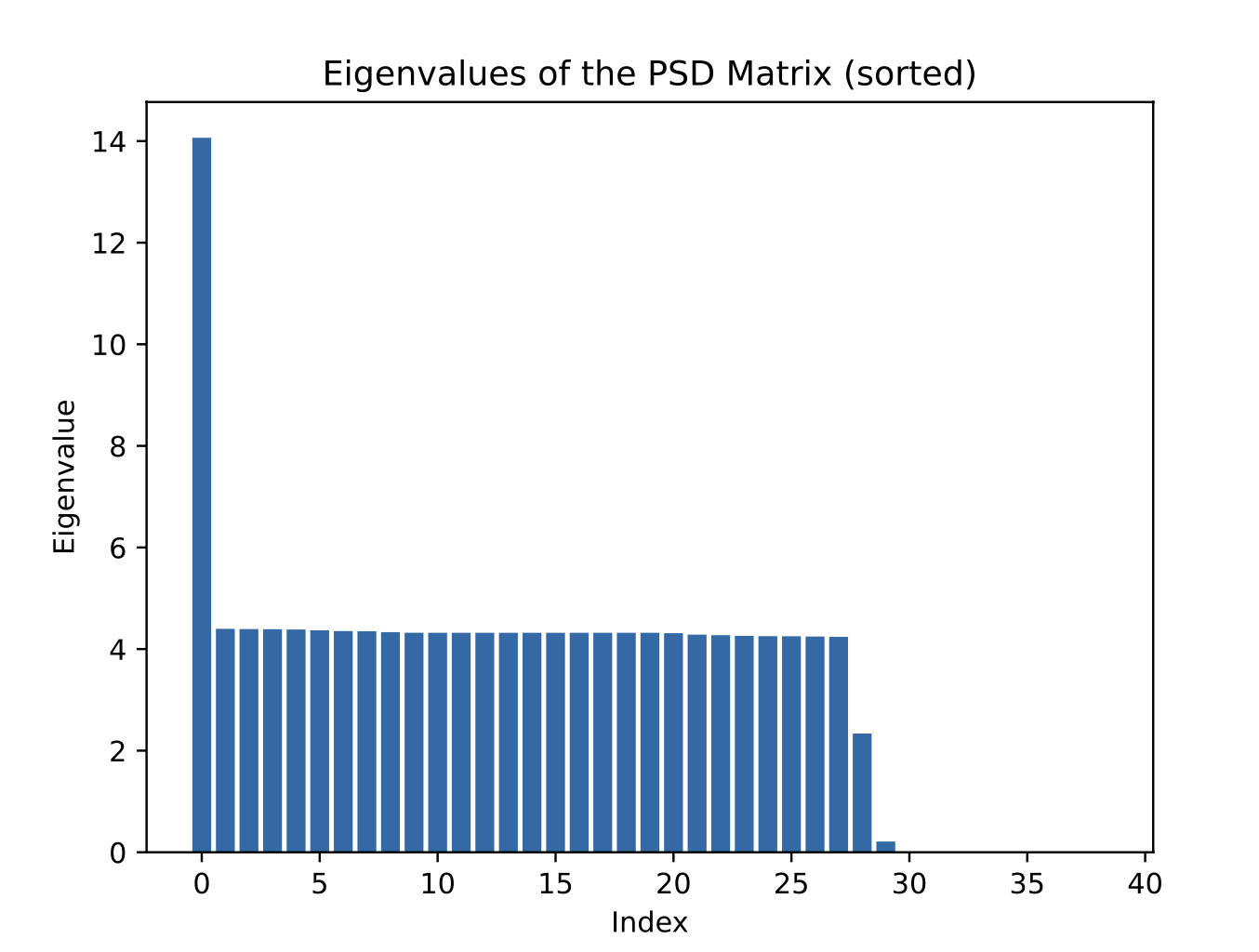
Opt gap = \( -89.67 \% \)
Attempt 2: Eliminate equality constraints
(Equivalent to eliminating equality constraints by parametrizing affine feasible set \( \set{x | Bx = d} = \set{Fz + \hat{x} } \) )
QCQP
SDR-EQ
Multiply \( Bx= d\) with \(x^T\) and linearize with \( X = xx^T \)
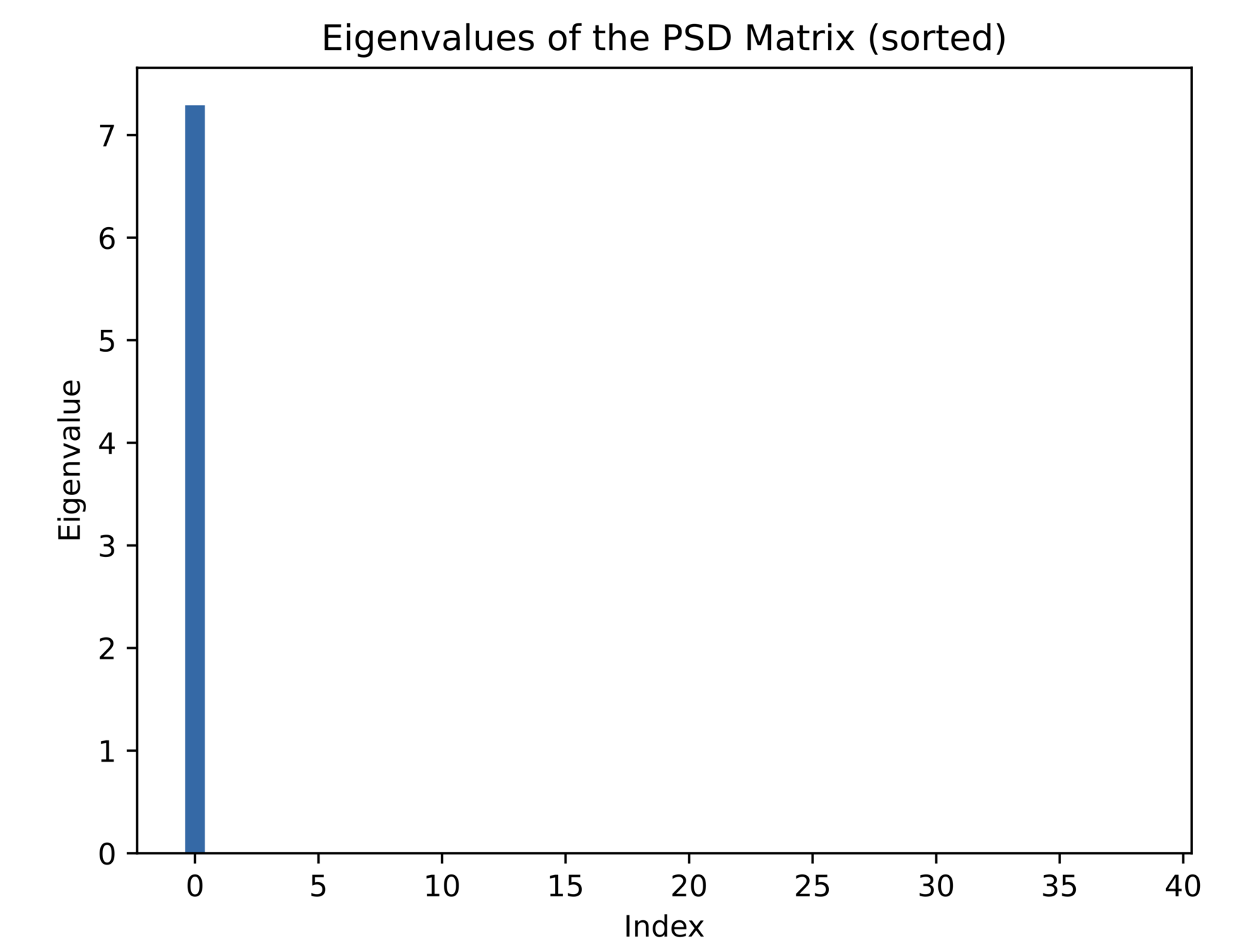
Attempt 2: Result
\( \text{rank}(X) \approx 3 \)
\( C_\text{relaxed} = 0.795 \)
\( C_\text{opt} = 0.968 \)
Opt gap = \(-17.9 \% \)
Note:
You should always eliminate equality constraints.
(either by adding implied constraints or by reparametrization)
Attempt 3: Add implied linear constraints
QCQP
SDR-RLT
Multiply \( Ax-b \leq 0 \) with its transpose and linearize with \( X = xx^T \)
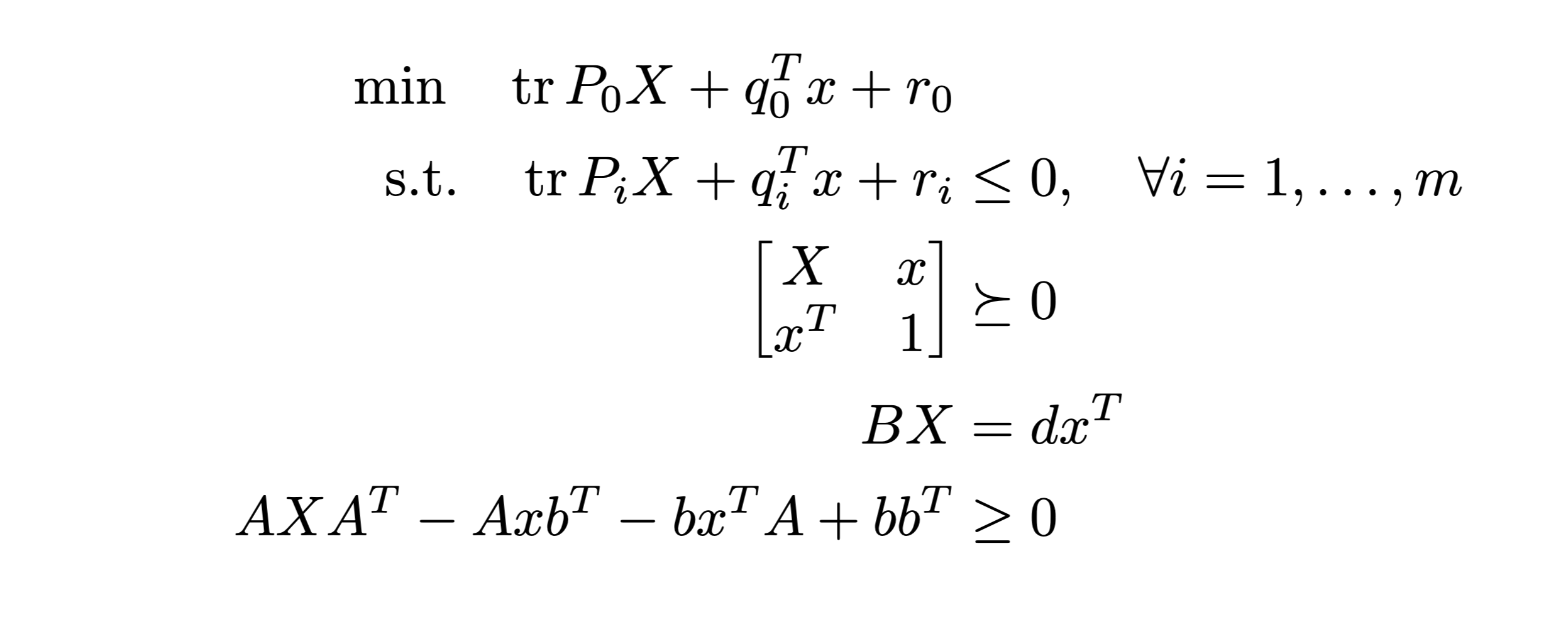
Attempt 3: Result
\( \text{rank}(X) = 1 \)
\( C_\text{relaxed} = 0.968 \)
\( C_\text{opt} = 0.968 \)
Opt gap = \(0 \% \)
Relaxation is tight!
Inefficient?
- Are we generating too many constraints?
- In our example, most of these are not needed
Let us remove some constraints
- The implied constraints needed for tightness turn out to be:
- Take product between all timesteps
- If we add these implied constraints, solution is tight
Can we leverage band structure?
- Let's try this here. Only take product between \(n\) successive timesteps:
- Turns out it is tight for \( n= 5\) (with \( T = 10 \))
- I.e. we can not leverage band sparsity and preserve tightness
- In this toy problem we get rid of \( 82 \% \) of all linear implied constraints (\( 459 \rightarrow 83 \))
- Previously we have leveraged TO band structure for efficiency
\( n = 1\)
Opt gap = \( -17.6 \% \)
Opt gap = \( -5.5 \% \)
Opt gap = \( -0.06 \% \)
\( n = 3\)
\( n = 4\)

But what if the relaxation is still not tight...?
Okay, so you can:
- Eliminate linear equality constraints
- Add all implied linear inequality constraints
What about other constraints?
Generally want to model signed distance as a SOC:
\( \phi \geq \| q^a - c \| \)
constant position of contact point on box
This gives a terrible relaxation (even with all our tricks so far)
\( \phi \)
Opt gap = \( -89.67 \% \)

What constraint is missing?
\( \phi \geq \| q^a - c \| \) and \( n \geq 0 \)
We need to multiply and linearize the SOC too:
\( \phi n \geq \| q_a n - c n \| \)
\( \implies \)
\( \implies \)
Linearize with \( X = xx^T \)
\( X_{\phi n} \geq \| X_{q_a n} - c n \| \)
We multiply a SOCC in \( x \) with a linear constraint in \( x \) to obtain a new SOC in \( (x, X) \).
Now the solution is tight!
A more useful example: With this we can model signed distances exactly in \( \R^2 \) and \( \R^3 \) (we could not do this before!)
(We now allow x and y motion)
This is a general recipe
-
In general: multiply SOCCs and linear constraints in \( x \) to obtain new SOCCs in \( (x,X) \) (which imposes additional structure on the lifted variables).
-
One can keep doing this for SOCCs with SOCCs to obtain new SOCCs, and similarly with any convex quadratic constraints.
- See for instance:
[1] R. Jiang and D. Li, “Second order cone constrained convex relaxations for nonconvex quadratically constrained quadratic programming,” J Glob Optim 2019
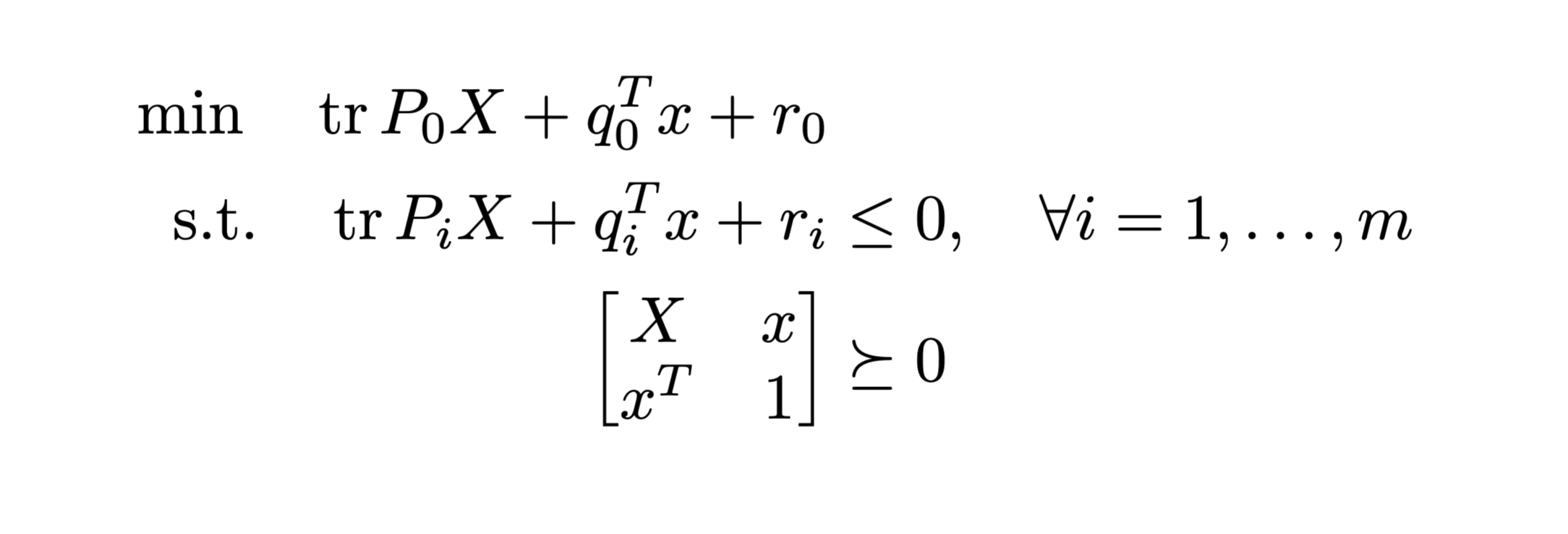
What if we have convex quadratics?
Say \( P_i \succeq 0 \) for some \(i\).
QCQP
Should we keep the convex constraint?
I.e. add both
and
?
The answer is no.
Then \( S_2 \subseteq S_1 \).
(i.e. we should only add the linearized quadratic constraint).
Lemma:
Proof:
Suppose \(x \in S_2 \) and \(X \succeq xx^T\).
Then \(0 \geq \text{tr}(P_i X) + Q_i^T x + r_i \geq x^T P_i x + q_i^T x + r_i\), i.e. \( x \in S_1 \).
(Because \(P_i \succeq 0\) and \(X \succeq xx^T \) \(\implies\) \(\text{tr}(P_i X) \geq \text{tr}(P xx^T) \)) \(\square\)
Let
Some conclusions
- Always eliminate equality constraints
- Adding linear implied constraints can make a big difference
- (Does not seem to help for Rebecca's problems?)
- Leveraging TO band sparsity to reduce the number of implied constraints can reduce tightness
- (I had not observed this before, but in this toy problem it is very clear)
- Implied constraints between SOCCs and linear constraints can be very important
A final thought: Working with semidefinite relaxations can feel a bit like this...