Long-Term Analysis of Carrier Phase Residual Variations
Brian Breitsch
Jade Morton
Charles Rino

Using Geometry-Ionosphere-Free Combination of Triple-Frequency GPS Observations
ION GNSS 2017
Background and Motivation
Linear Estimation of GNSS Parameters
Application to Real GPS Data
Global Navigation Satellite Systems (GNSS)
...a useful everyday radio source for geophysical remote-sensing!
GPS
GLONASS
Beidou
Galileio
...etc.
GPS - Global Positioning System
- 32-satellite constellation
- transmit dual-frequency BPSK-moduled signals
| Signal | Frequency (GHz) |
|---|---|
| L1CA | 1.57542 |
| L2C | 1.2276 |
| L5 | 1.17645 |

- new Block-IIF and next-gen
Block-III satellites transmitting triple-frequency signals
GNSS Carrier Phase Observable
HARDWARE BIAS
IONOSPHERE RANGE ERROR
CARRIER AMBIGUITY
SYSTEMATIC ERRORS / MULTIPATH
FREQUENCY INDEPENDENT EFFECTS
STOCHASTIC ERRORS
accumulated phase (in meters) of demodulated GNSS signal at receiver for a particular satellite and signal carrier frequency \(f_i\)
Simplified Carrier Phase Model
zero-mean
normally-
distributed
zero-mean
neglect bias terms
By neglecting bias terms, we address estimation precision, rather than accuracy
"geometry" term
Ionosphere Range Error
consider first-order term in ionosphere refractive index
second and higher-order terms on the order of a few cm
TOTAL ELECTRON CONTENT

rx
tx
plasma / free electrons
units: \(\frac{\text{electrons}}{\text{m}^2}\)
often measured in TEC units:
carrier frequency
Estimation of \(G\) and \(\text{TEC}\) Using Dual-Frequency GNSS
neglecting systematic and stochastic error terms, and after resolving bias terms:
ionosphere-free combination
geometry-free combination
Examples of Dual-Frequency TEC Estimates

Poker Flat, Alaska, 2016-01-02
We compute dual-frequency TEC estimates \(\text{TEC}_\text{L1,L2}\) and \(\text{TEC}_\text{L1,L5}\)
\(G_{\text{L1,L5}} - G_{\text{L1,L2}} = \text{TEC}_{\text{L1,L5}} - \text{TEC}_{\text{L1,L2}}\)
Poker Flat, Alaska, 2016-01-02

Can we characterize / find the source of these discrepancies?
Can we relate them to errors in range and TEC estimates?
Background and Motivation
Linear Estimation of GNSS Parameters
Application to Real GPS Data
model parameters
Linear Inverse Problem
observations
stochastic error
forward model
Linear Estimation
We must apply a priori information about model parameters
geometry estimator
TECu estimator
systematic-error estimators
20,000 km
1 - 150 m
several cm
Linear Coefficient Constraints
Use one or two of the following constraints to reduce search space for optimal estimator coefficients:
geometry-free
geometry-estimator
TEC-estimator
ionosphere-free
Reduction of Error
Linear combination stochastic error variance:
where \(\mathbf{\Sigma}_\epsilon\) is the covariance matrix between \(\mathbf{\epsilon}_i\)
Optimal \(\mathbf{C}\) for minimizing stochastic error variance:
\(\epsilon_i\) equal-amplitude and uncorrelated
TEC Estimator
1. apply TEC-estimator constraint
2. apply geometry-free constraint (since \(|G| \gg |I_i|\) )
Dual-Frequency Example
TEC-estimator
geometry-free
recall:
Triple-Frequency TEC Estimator

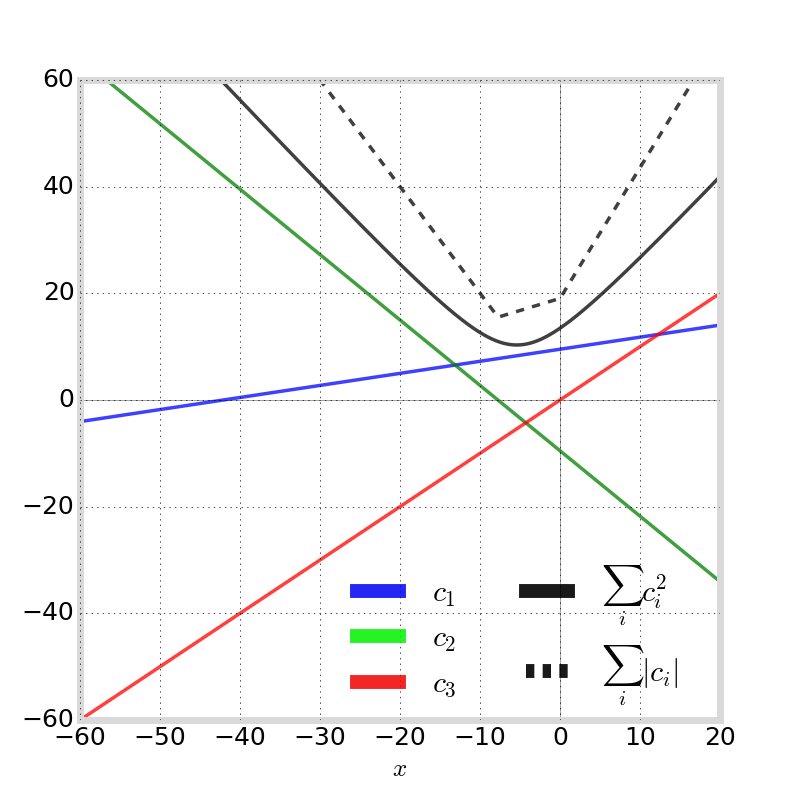
Applying constraints yields following system of coefficients (with free parameter denoted \(x\):
To satisfy \( \mathbf{C}^* = \ \displaystyle \arg\min_\mathbf{C} \sum_i c_i^2 \), choose
denote corresponding coefficient vector \(\mathbf{C}_{\text{TEC}_{1,2,3}}\) and its corresponding estimate \(\text{TEC}_{1,2,3}\)
TEC Estimator Using Triple-Frequency GPS

Geometry Estimator
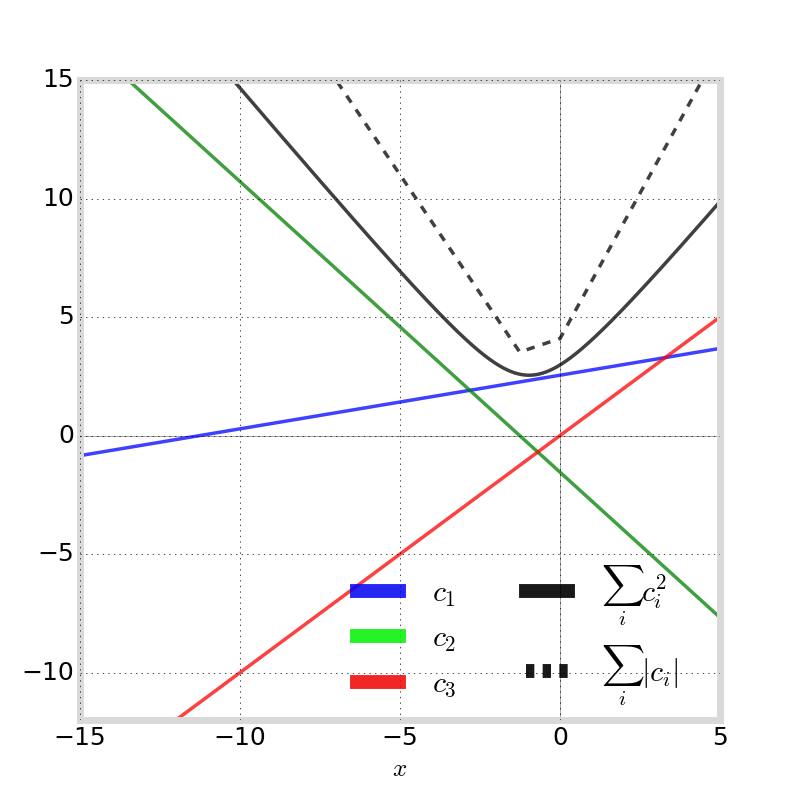
For triple-frequency GNSS:
1. apply geometry-estimator constraint
2. apply ionosphere-free constraint since \(I_i\) are the next-largest terms
To satisfy \( \mathbf{C}^* = \ \displaystyle \arg\min_\mathbf{C} \sum_i c_i^2 \),
We call this coefficient vector \(\mathbf{C}_{G_{1,2,3}}\) and its corresponding estimate \(G_{1,2,3}\)
the optimal "ionosphere-free combination"
Geometry Estimator Using Triple-Frequency GPS

Systematic Error Estimator
Since \(|G| \gg |I_i| \gg |S_i|\), must apply both geometry-free and ionosphere-free constraints
For triple-frequency GNSS:
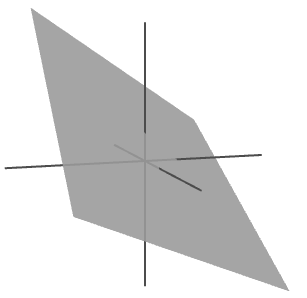
system is linear subspace
there is "only one" estimate of systematic errors
note this requires \(m \ge 3\)

Geometry-Ionosphere-Free Combination
FACT: The difference between any two geometry term or any two TEC estimates produces some scaling of the GIFC
FACT: \(\mathbf{C}_\text{GIFC} \perp \mathbf{C}_{G_{1,2,3}}\) and \(\mathbf{C}_\text{GIFC} \perp \mathbf{C}_{\text{TEC}_{1,2,3}}\)
information about systematic and stochastic errors present in GNSS carrier phase observables
GIFC Triple-Frequency GPS
We (arbitrarily) choose:
Note: the triple-frequency GIFC does not have a well-defined unit.
GIFC in our results section have the scaling shown here.
Background and Motivation
Linear Estimation of GNSS Parameters
Application to Real GPS Data
Experiment Data
GPS Lab high-rate GNSS data collection network
- Alaska, Hong Kong, Peru
- 2013, 2014, 2015, 2016
- 1 Hz GPS L1/L2/L5 measurements
- Septentrio PolarXs

GIFC Examples




Peru G24
Hong Kong G24
Peru G25
Alaska G01
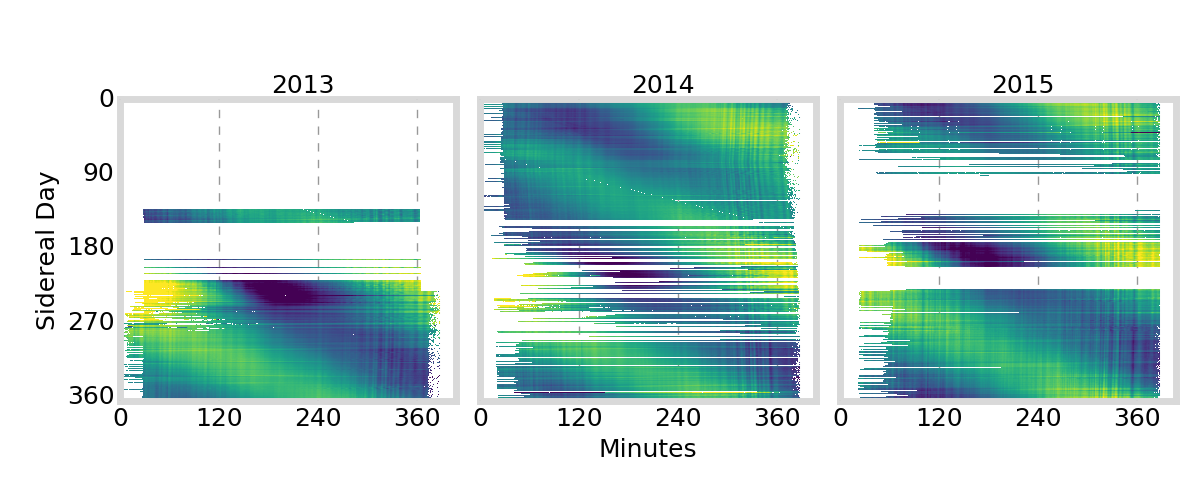

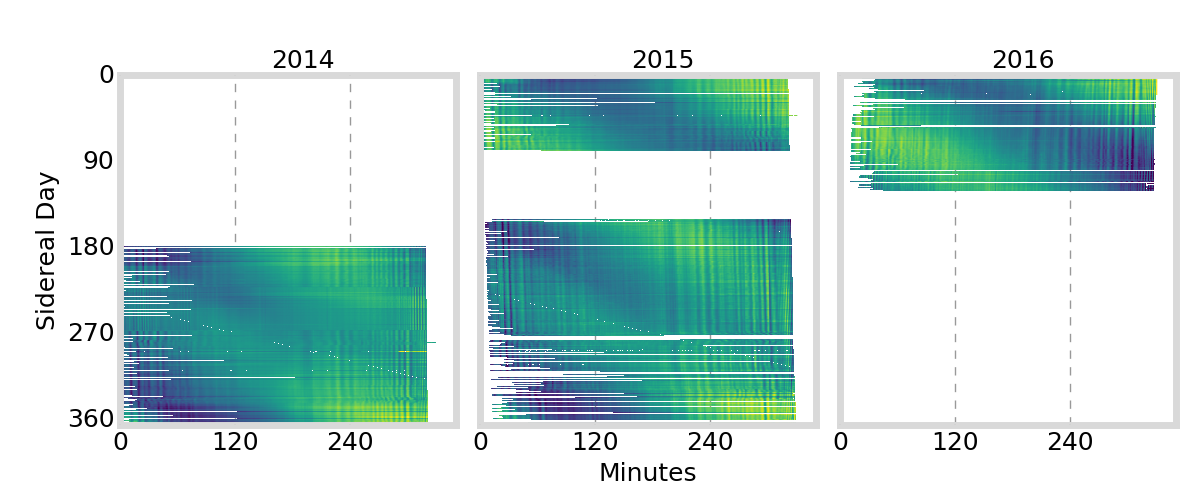


GIFC Calendar
Hong Kong G24
Alaska G25
Alaska G01

- large, long-term GIFC trend likely due mostly to satellite thermal oscillations
- studied by (Montebruck et. al. 2012) and (Li et. al. 2013)
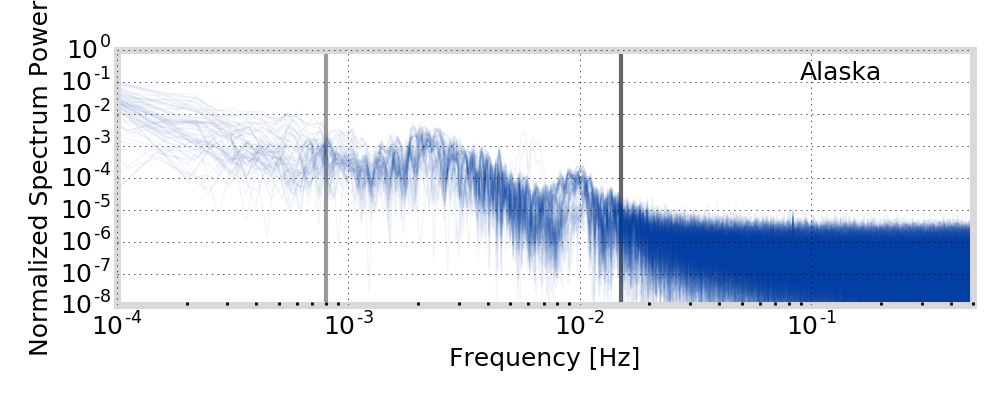


GIFC Spectrum
Alaska
Hong Kong
Peru


GIFC Histogram
Peru Example

Conclusions
- GIFC is an indicator of the presence of systematic / stochastic errors
- two main components to GIFC
- large, low-frequency trend (likely due to satellite thermal oscillations)
- multipath
- this work is a step towards improved assessment of precision of GNSS phase-related estimates, particularly ionosphere TEC
- small improvement of triple-frequency estimators over dual-frequency signal pair with widest frequency separation
References
O. Montenbruck, U. Hugentobler, R. Dach, P. Steigenberger, and A. Hauschild, “Apparent clock variations of the Block IIF-1 (SVN62) GPS satellite,” GPS Solutions, vol. 16, no. 3, pp. 303–313, 2012.
H. Li, X. Zhou, and B. Wu, “Fast estimation and analysis of the inter-frequency clock bias for Block IIF satellites,” GPS Solutions, vol. 17, no. 3, pp. 347–355, 2013.
Acknowledgements
This research was supported by the Air Force Research Laboratory and NASA.