Fast scenario-based decision making
in unbalanced distribution networks
Saverio Bolognani, Florian Dörfler
Automatic Control Laboratory

Future power distribution grids






From fit-and-forget to
active power distribution networks
- Worst case analysis at planning stage
(e.g. California "15% rule")
- A little bit of sensing and actuation
- Real time control

Distribution Network operation under uncertainty
Exogeneous inputs
- Power generation
- Power demands
- Substation voltage
Grid
state
Control inputs
- Tap changer
- Volt/VAR control
- Voltage regulators
- Active power control
- Load shedding
- Generation curtailment
Operational constraints
- Over/under voltage limits
- Line current limits
- Transformer loading
- Voltage stability
Distribution network model
Grid state (nodal variables)
Power flow equations
Implicit nonlinear model
Uncertain and control inputs
Exogenous stochastic inputs
Control inputs available to the DNO
e.g. load
e.g. microgenerator
Operational constraints
- Nodal constraints (under- / over- voltage, power limits)
-
Proxy for line capacity, transformer current limits, etc.
Chance constrained decision problem
Complexity of the problem: feasible region.
An analytical derivation of the feasible region is hopeless
- general probability distribution for
- nonlinear dependence of on and
Cost of control
Probability of satisfying constraints
Nonlinear model
Chance constraints in Power Systems
L. Roald, M. Vrakopoulou, F. Oldewurtel, G. Andersson (2014)
"Risk-Constrained Optimal Power Flow with Probabilistic Guarantees"

D. Bienstock, M. Chertkov, S. Harnett (2014)
"Chance-Constrained OPF: Risk-Aware Network Control under Uncertainty"
T. Summers, J. Warrington, M. Morari, J. Lygeros (2014)
"Stochastic OPF based on convex approximations of chance constraints"
M. Vrakopoulou, M. Katsampani, K. Margellos, J. Lygeros, G. Andersson (2013)
"Probabilistic security-constrained AC optimal power flow"
DC model /
power balance eqs.
Planning /
day ahead dispatch
N-1 criterion
replacement
Scenario approach
Approximate the constraint
via the set of constraints
where are samples (realizations) of
- Based on stochastic models (fitted to the data)
- Directly from the history of the system
G.C. Calafiore, M.C. Campi (2006)
"The scenario approach to robust control design"
Scenario approach
How many?
- Does not depend on the grid size
- Depends on the number of controls
Computational complexity
For each sample, compute
and then derive the approximate feasible region
Computing each feasible region based on NL grid eqs.
is a computationally very intensive task
K. Dvijotham, K. Turitsyn (2015)
"Construction of power flow feasibility sets"
Linear manifold approximant
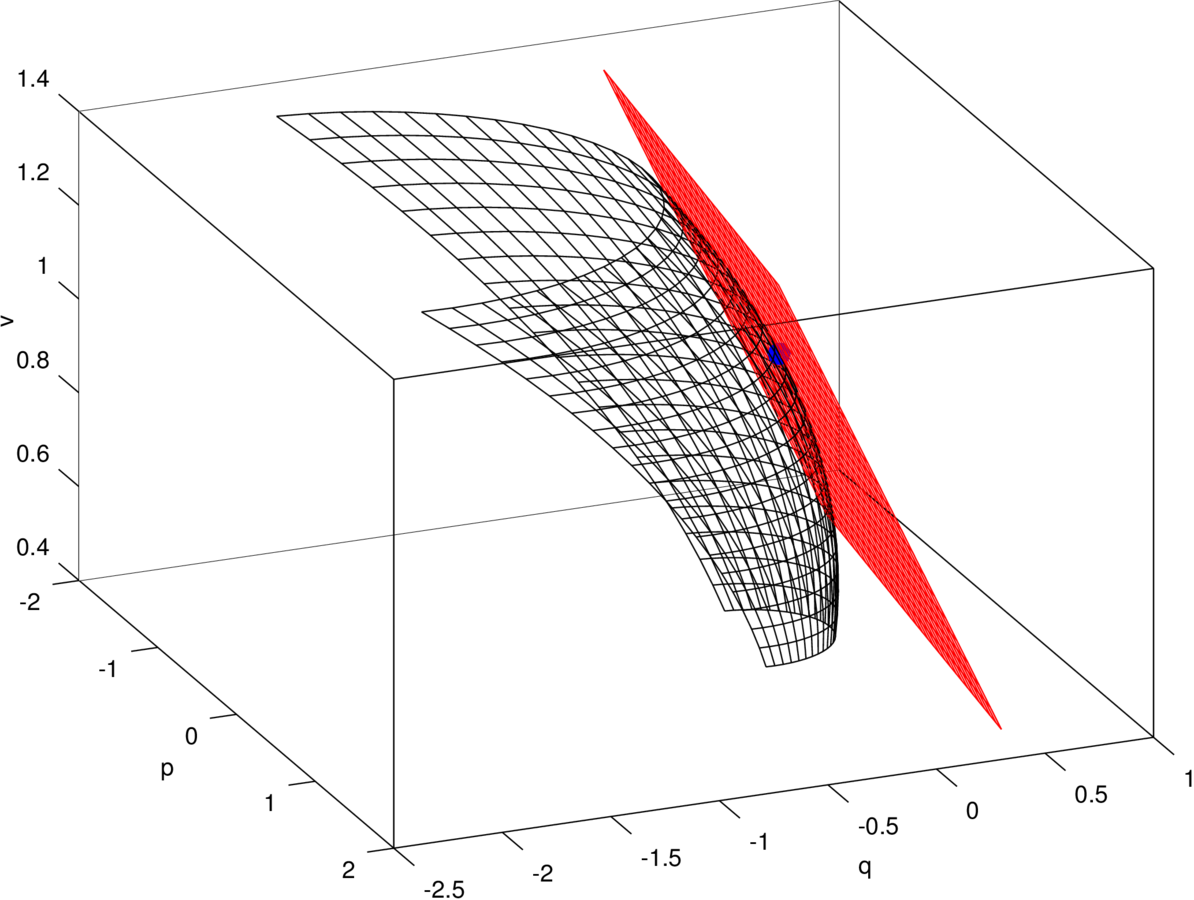
Power flow manifold
Nominal state
S. Bolognani and F. Dörfler (2015)
“Fast power system analysis via implicit linearization of the power flow manifold”
Tangent space
Under-determined
system of linear equations
Linear manifold approximant
- Sparse
- Structure preserving
- No assumption on
- X/R ratio
- constant voltage
- radial network
- Implicit linear relation
Compare with DC, LinDistFlow, ...
Sparse implicit linear model
Implicit nonlinear model
Linear manifold approximant
General case
Extended state
From complex-value to real-valued equations
complex-valued
real-valued
Linear manifold approximant
Evaluate the partial derivatives of
Eliminate currents and obtain
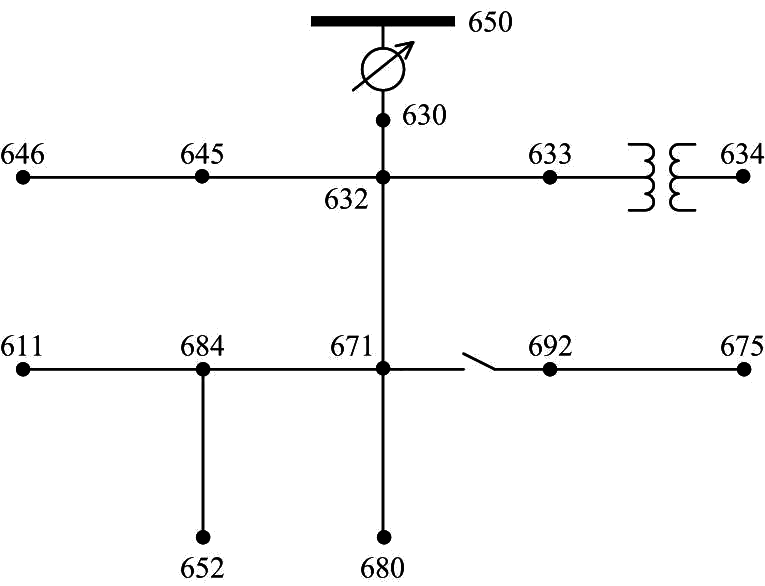
IEEE 13 Test feeder
- Relatively highly loaded
- Substation voltage regulator
- Overhead and underground lines
- Variety of phasing
- Shunt capacitor banks
- Unbalanced loads
Quality of the approximation

Approximate feasible region
Feasible
control inputs
i-th feasible region for the scenario approach
Feasible
states
Approximate feasible region
Linearization point matters!
- Zero-load profile
- Numerical solution in typical conditions
- Measured state
Polytope operations
-
Convenient representation for optimization
- Linear inequalities in reduced dimension
-
Many redundant constraints
- Fourier-Motzkin elimination
- Fast operations on polytopes
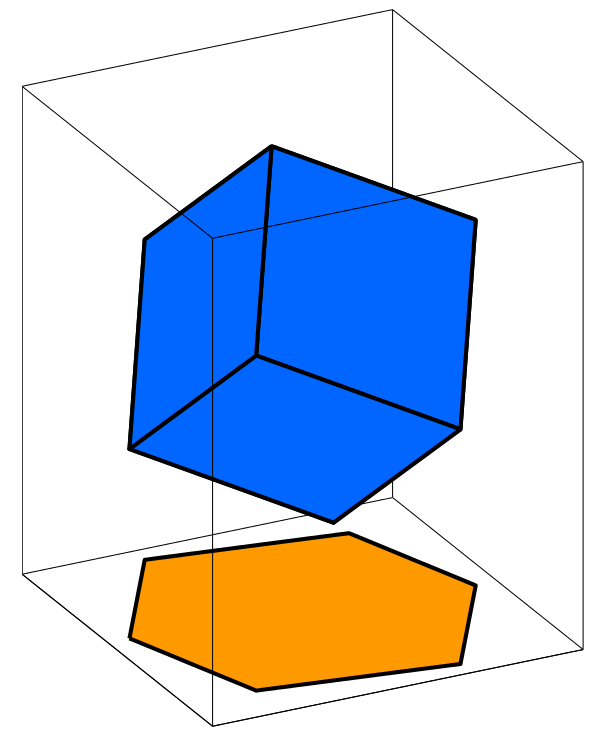
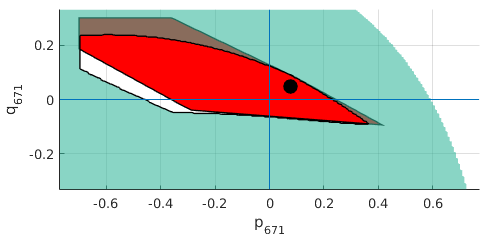
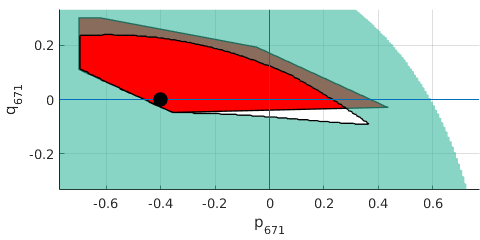
Chance-constrained feasible region
Disturbances
- Power demand of spot loads
Operational constraints
- Under- and over-voltage limits
Decision variables
- Generation curtailment @671
- Tap changer position @630
5% confidence
Microgenerator
Tap changer
Simulations
MultiParametric Toolbox for Matlab by IfA


- Towards real time chance-constrained operation
- Next step:
- Slow data - Forecast of uncertain inputs (offline)
- Fast data - Real time measurements (online)
Thank you for your attention.