IfA's Computational Control (COCO) Course
Where did it come from and where does it go from here?
Keith Moffat
12 June 2025





Sophie Hall
Nicolas Lanzetti
Alberto Padoan
Keith Moffat

Feiran Zhao
Jonas Matt
Andras Sasfi



Saverio Bolognani
Mohamed Abdalmoaty
The COCO Team:
(over the past 2.5 years)

Alessio Rimoldi
Student TAs:
Gerasimos Maltezos
Dylan Vogel
Henrique Caraca
Jordan Hong
Eric Aschari
My academic path







Point 1: ETH is a special place for curriculum development
Point 2: ETH curriculum is contagious
?
?
Where did COCO come from?
?

Where did COCO come from?
a confused PhD student
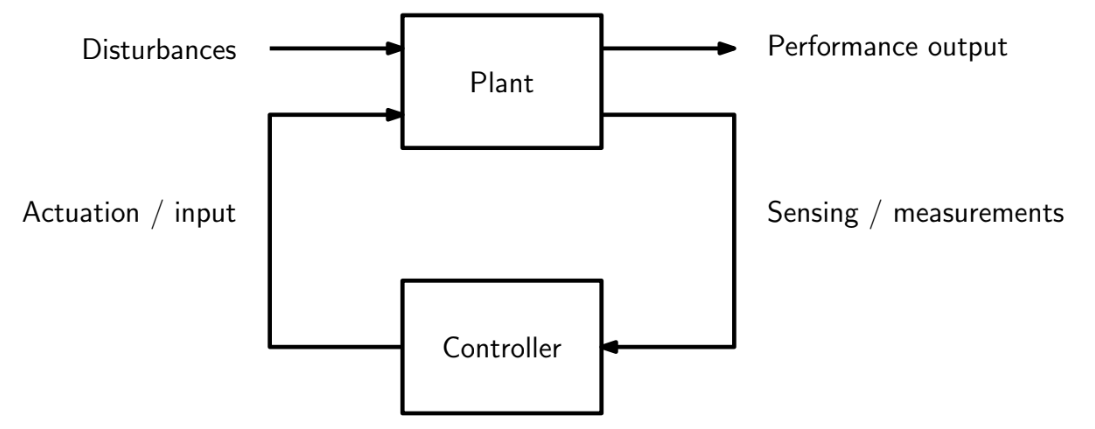
What is control?
Process automation, concept of control. Modelling of dynamical systems - examples, state space description, linearisation, analytical/numerical solution. Laplace transform, system response for first and second order systems - effect of additional poles and zeros. Closed-loop control - idea of feedback. PID control, Ziegler - Nichols tuning. Stability, Routh-Hurwitz criterion, root locus, frequency response, Bode diagram, Bode gain/phase relationship, controller design via "loop shaping", Nyquist criterion. Feedforward compensation, cascade control. Multivariable systems (transfer matrix, state space representation), multi-loop control, problem of coupling, Relative Gain Array, decoupling, sensitivity to model uncertainty. State space representation (modal description, controllability, control canonical form, observer canonical form), state feedback, pole placement - choice of poles. Observer, observability, duality, separation principle. LQ Regulator, optimal state estimation.
Then what?

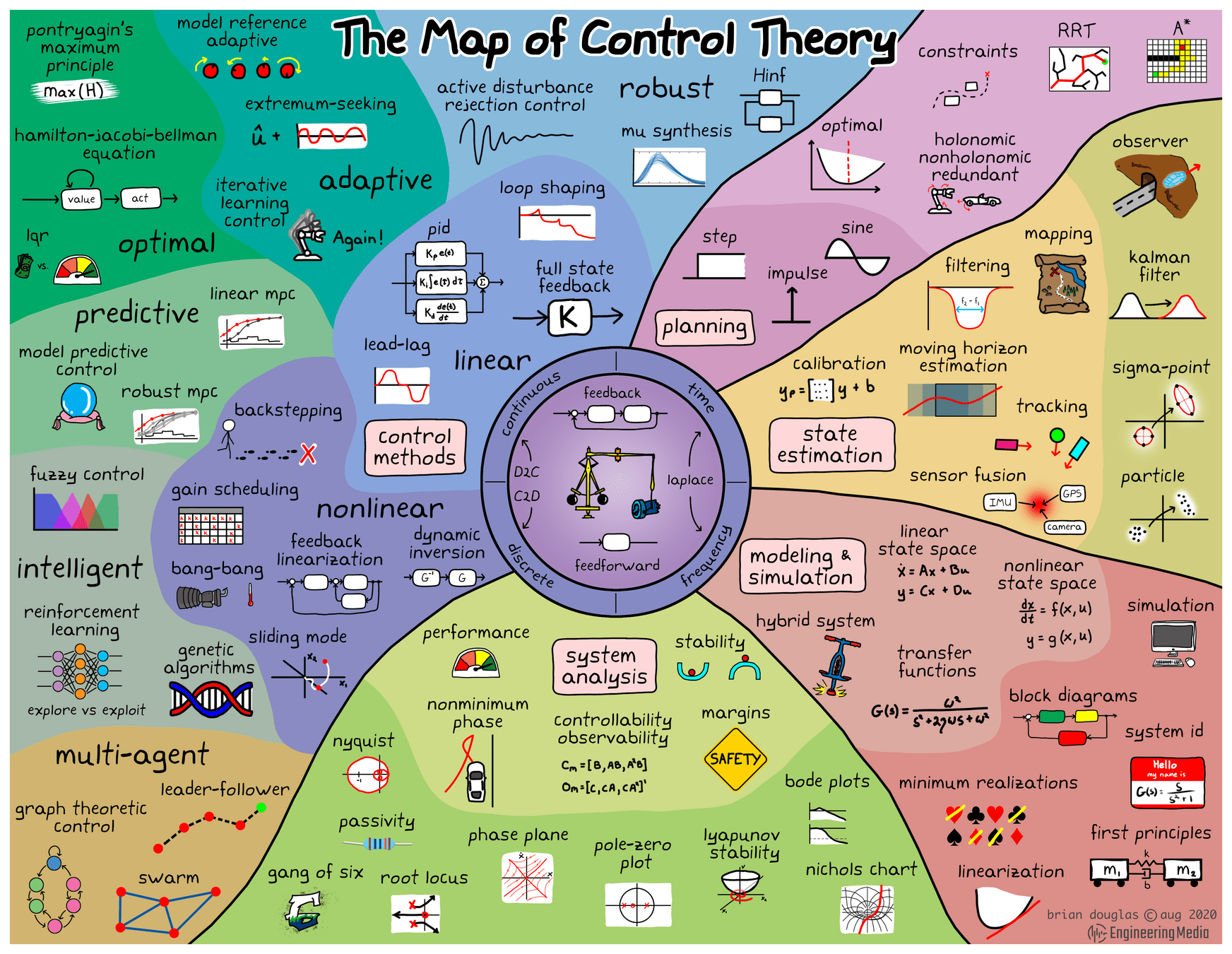
source: Brian Douglas/Matlab
?
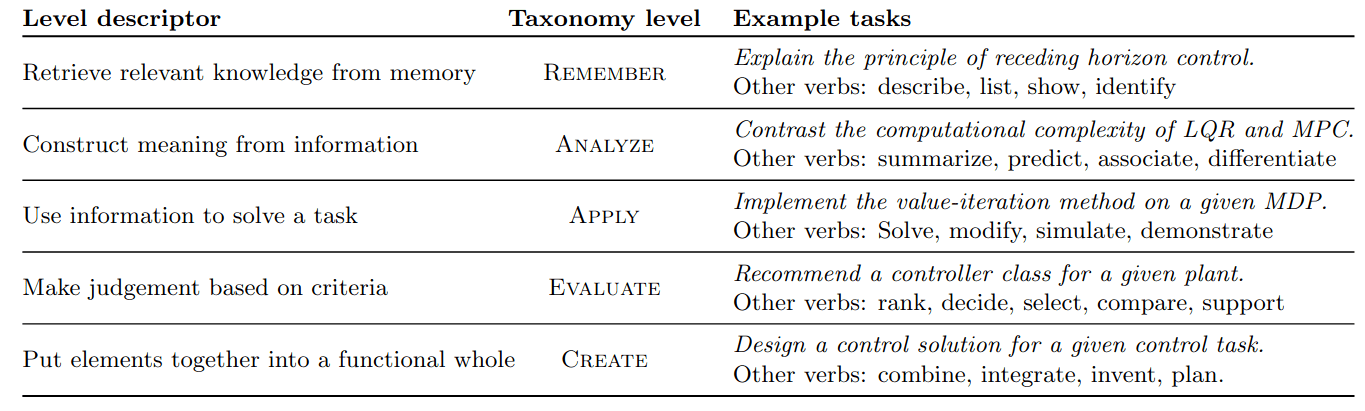

Taxonomy of competences
How has AI changed education?

"AI"
"humans"
How has AI changed education?
COCOExpert

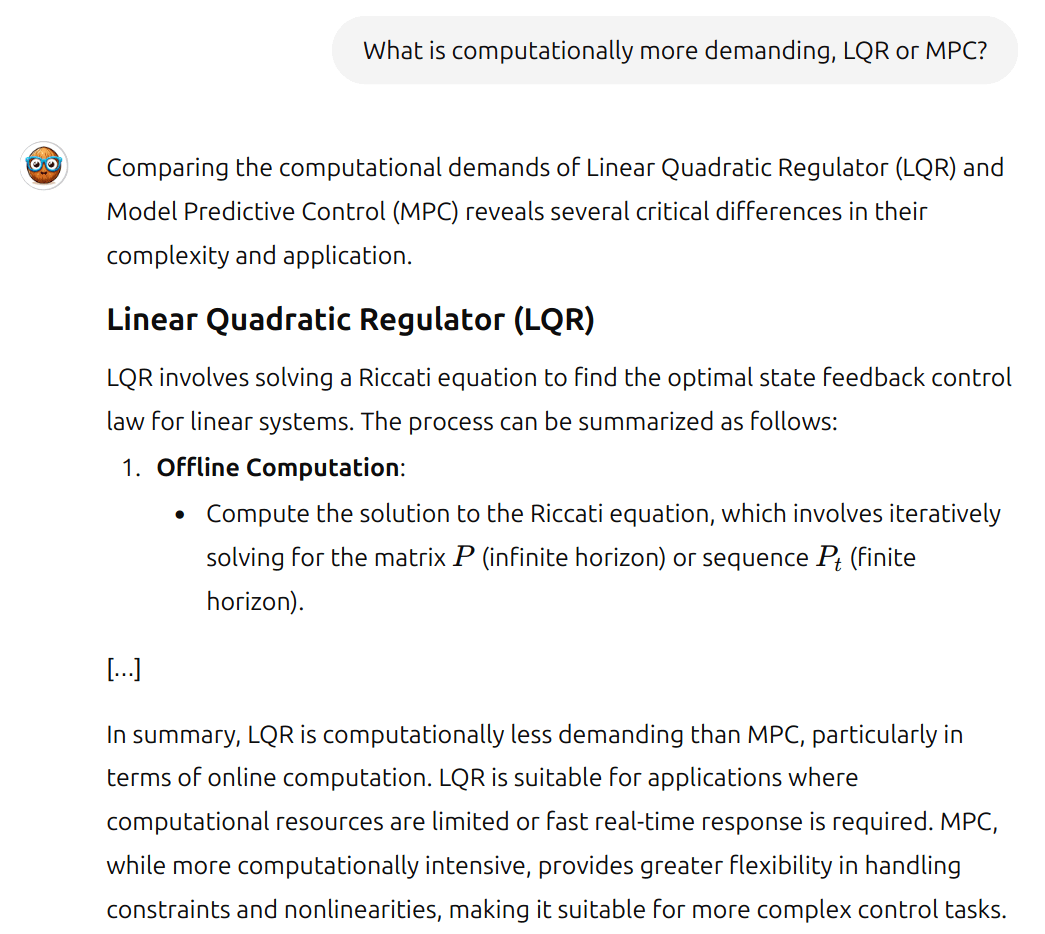
How has AI changed education?
What is a course?
How has AI changed education?
What is a course?
"Just give me a syllabus"
How has AI changed education?
What is a course?
"Just give me a syllabus."

"You're missing the point, dude."
Three didactic pillars:
Constructive Alignment
Build with the end in mind
Providing Orientation
Why should the students care?
Project-based Learning
Require high-level understanding
"This is the point."
Three didactic pillars:
Constructive Alignment
Build with the end in mind
Providing Orientation
Why should the students care?
Project-based Learning
Require high-level understanding
The students should be able to make control judgements based on criteria.
Three didactic pillars:
Constructive Alignment
Build with the end in mind
Providing Orientation
Why should the students care?
Project-based Learning
Require high-level understanding
The students should be able to make control judgements based on criteria.
Once you graduate, you will find yourselves in environments in which you are the control expert
Three didactic pillars:
Constructive Alignment
Build with the end in mind
Providing Orientation
Why should the students care?
Project-based Learning
Require high-level understanding
The students should be able to make control judgements based on criteria.
Once you graduate, you will find yourselves in environments in which you are the control expert
"You are a control expert. You have been hired by InsulinCo to improve their controller."
Three didactic pillars:
Constructive Alignment
Build with the end in mind
Providing Orientation
Why should the students care?
Project-based Learning
Require high-level understanding
The students should be able to make control judgements based on criteria.
Once you graduate, you will find yourselves in environments in which you are the control expert
"You are a control expert. You have been hired by InsulinCo to improve their controller."
Goal:
The students learn to use critical thought to make decisions for critical applications.
Competence-based training
constructive alignment
of learning activities
with learning objectives
Students
- 100-200 students
- Last-year B.Sc. students + first-year M.Sc. students
- Electrical Engineering
- Mechanical Engineering
- Robotics, Syst. & Control
- Energy Science and Technology
- Computer Science
- Biomedical Eng.
- Quantum Eng.
- ...
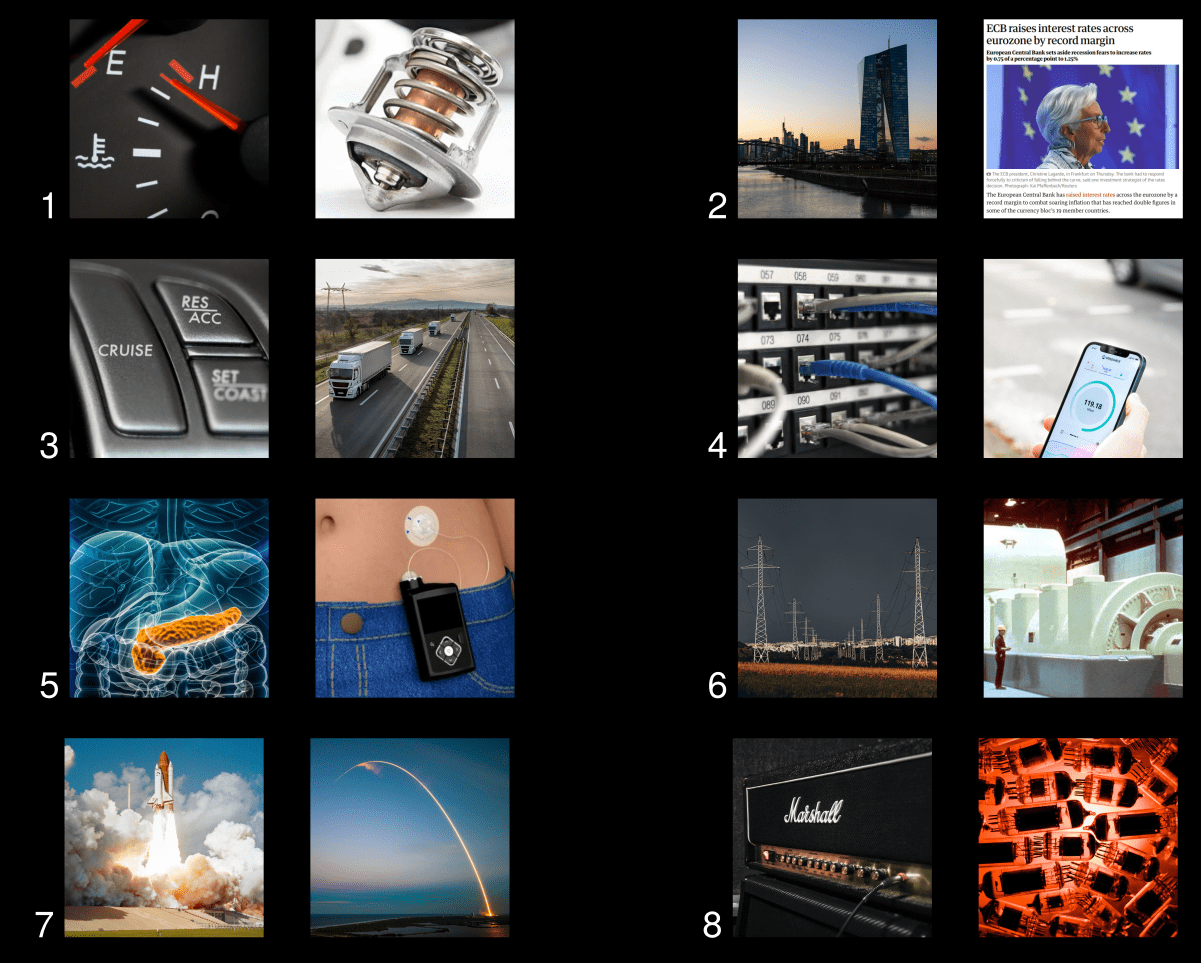
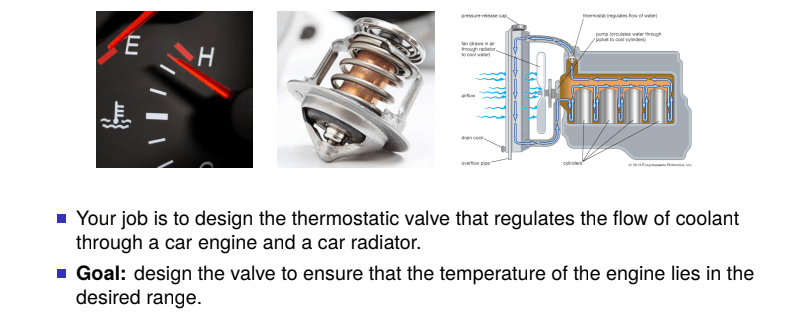
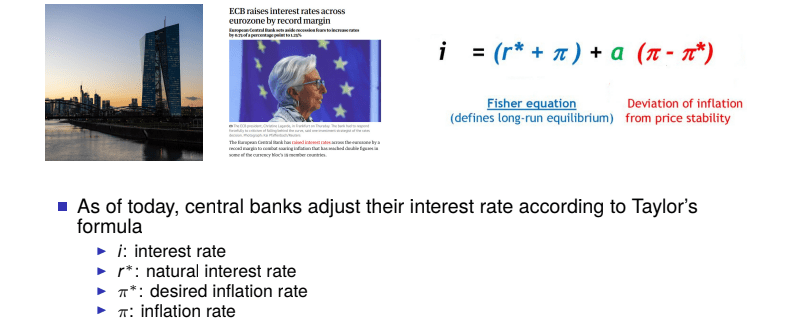
Group activity (first day of class)
For each design problem:
- Do you think you have the necessary competences?
- Would you take up the challenge?
- If yes, what methods would you use?
- If no, what’s blocking you?
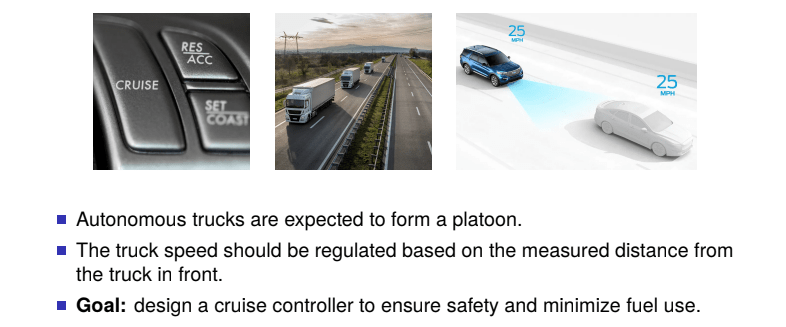
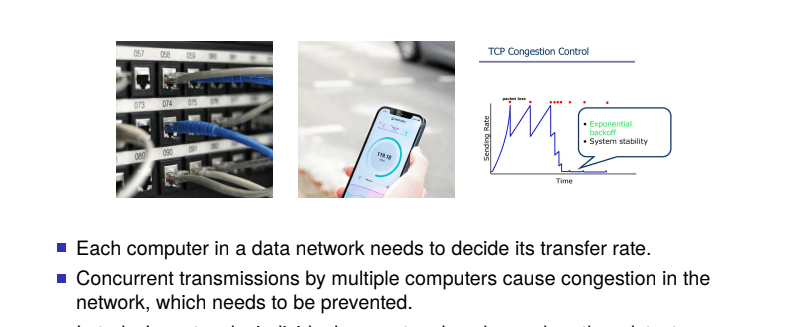
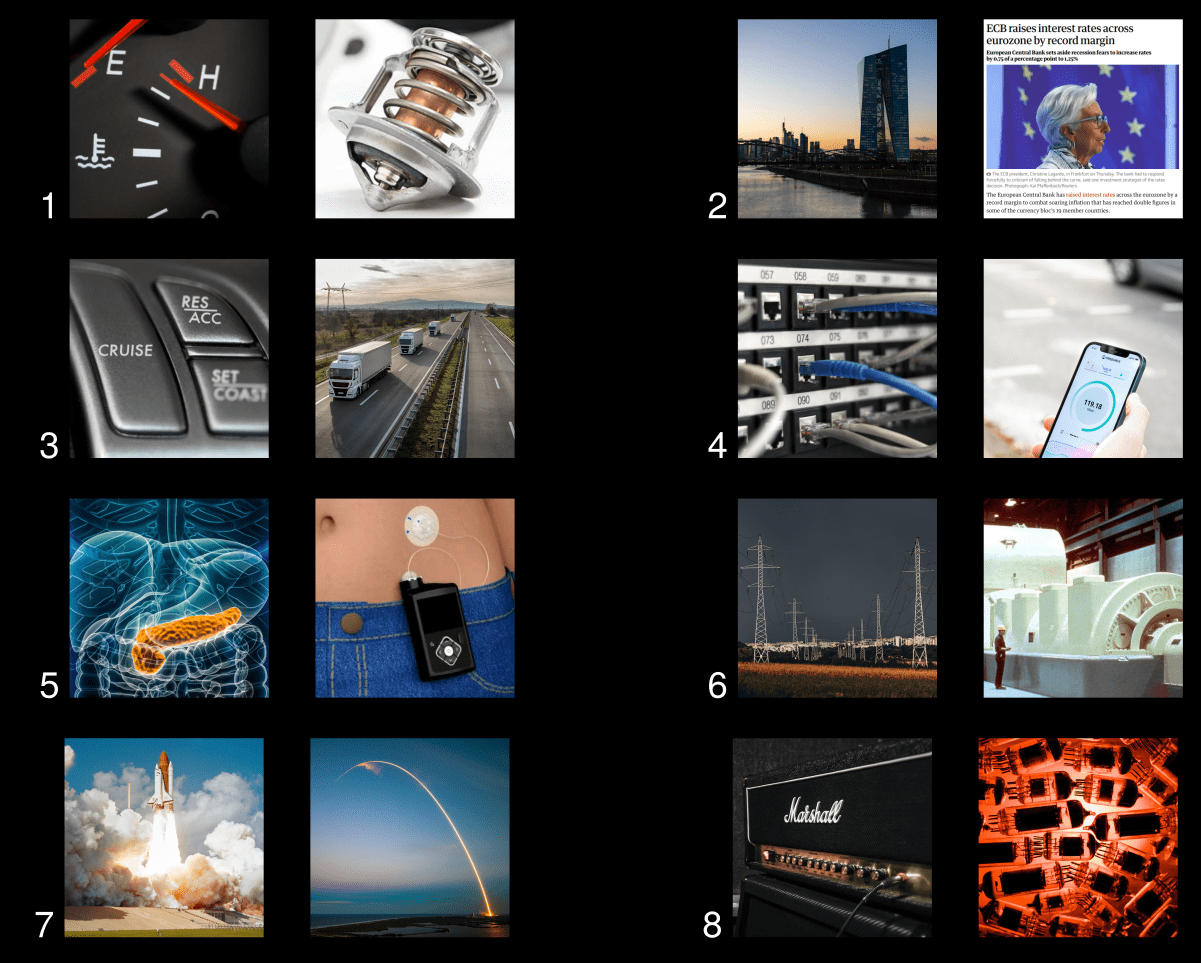
Systems in which the controller is an embedded computer that can sense and actuate a physical plant.
Suitable for systems where model uncertainty, stringent constraints, and complex dynamics call for advanced control solutions.
Course Content
-
Dynamic Programming and LQR
-
Model Predictive Control
-
Economic MPC
-
Robust MPC
-
SysID + Predictive Control
-
Feedback Optimization
-
Data-Driven Predictive Control
-
ARX/Transient Predictive Control
-
Markov Decision Processes
-
Monte Carlo Learning (episodic)
-
Reinforcement Learning (online)
LTI
state space
representation
Markov decision process
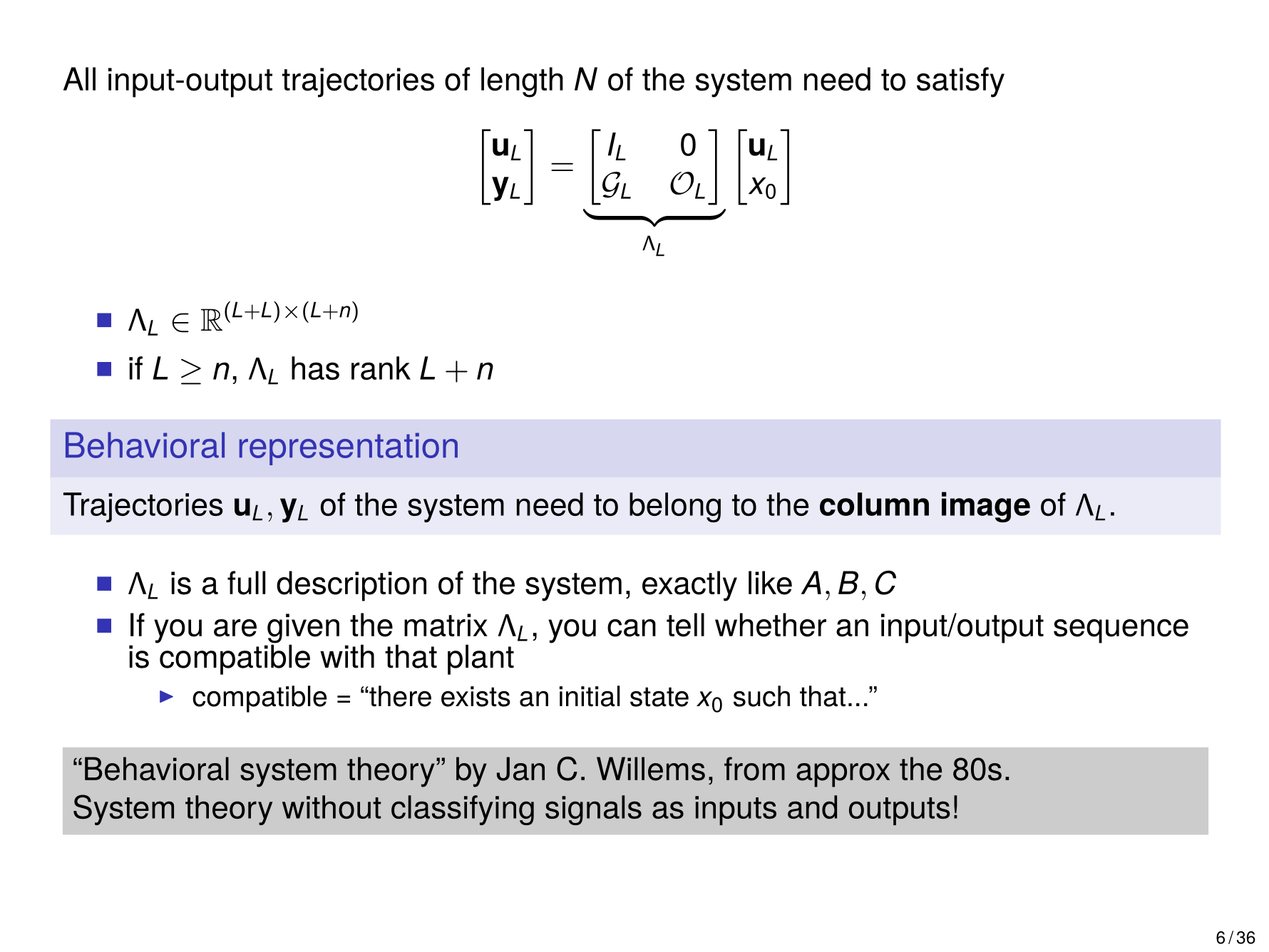
LTI behavioral representation
ARX representation
steady-state sensitivities
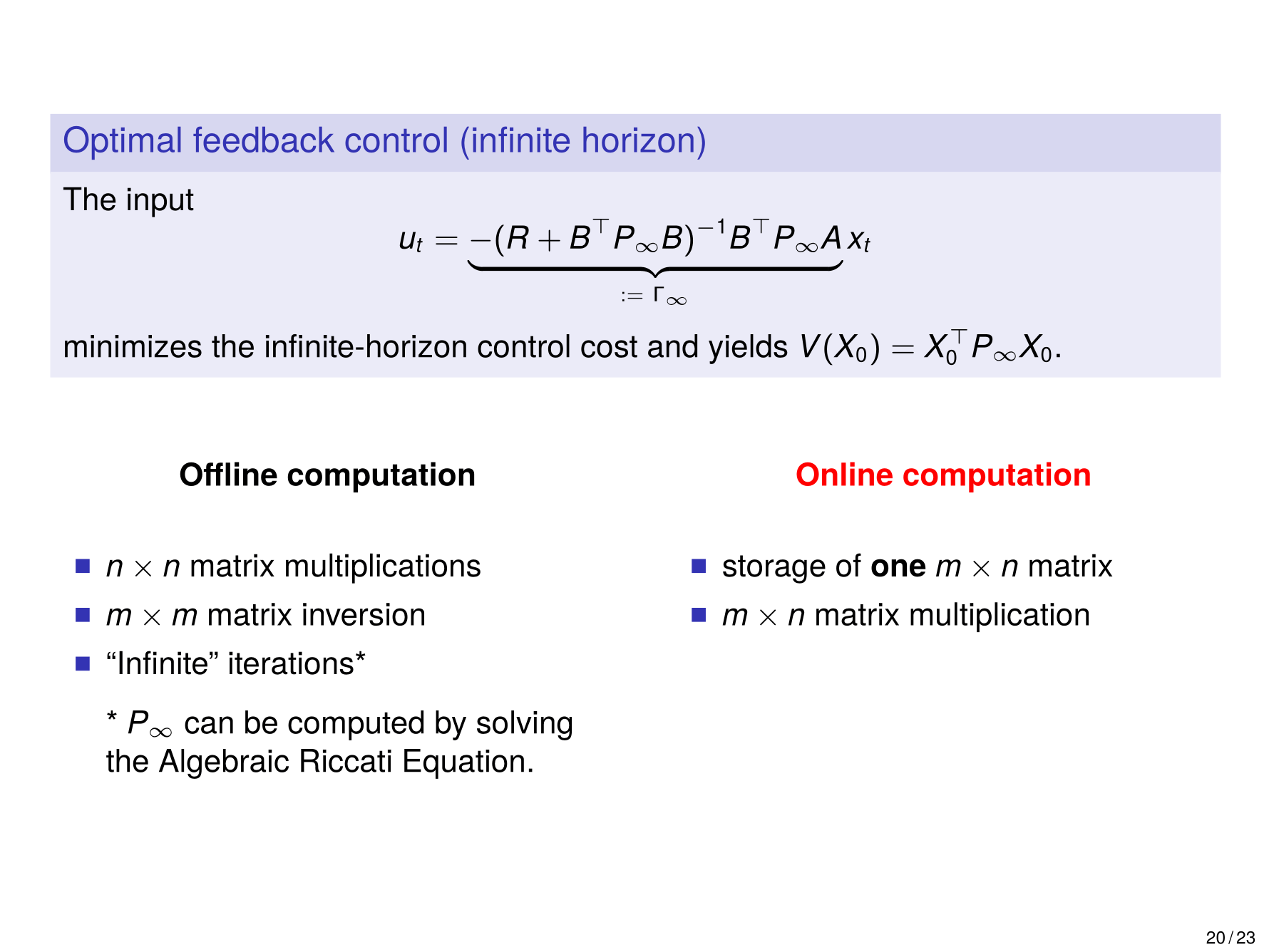
LQR
- State-space representation
- Optimal control problems
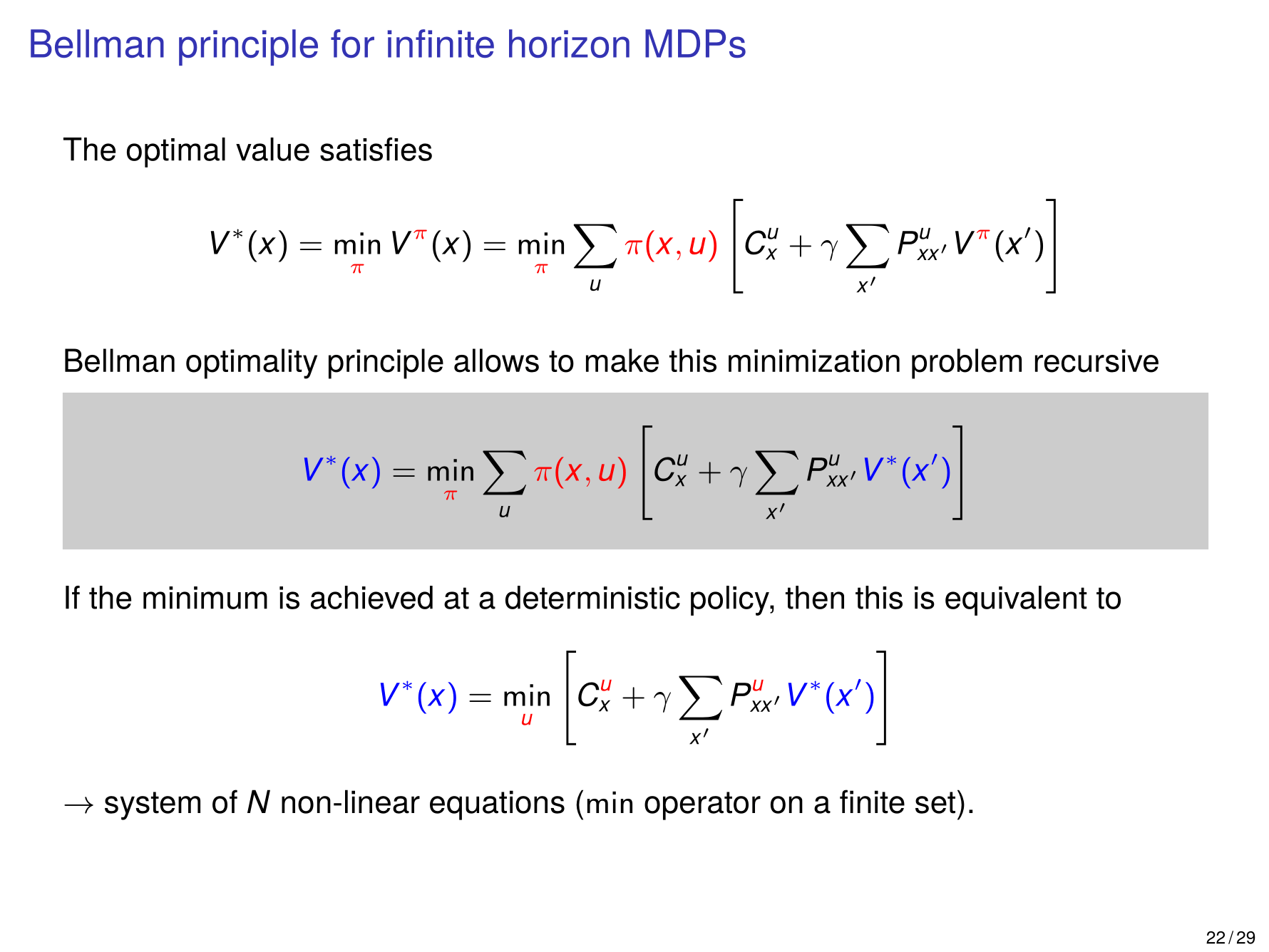
- Markovianity and Bellman principle
- Concept of value function
- Closed-form solution of linear-quadratic problems

Model Predictive Control
- Receding horizon principle
- Online computation and resulting static feedback
- Linear quadratic case + constraints
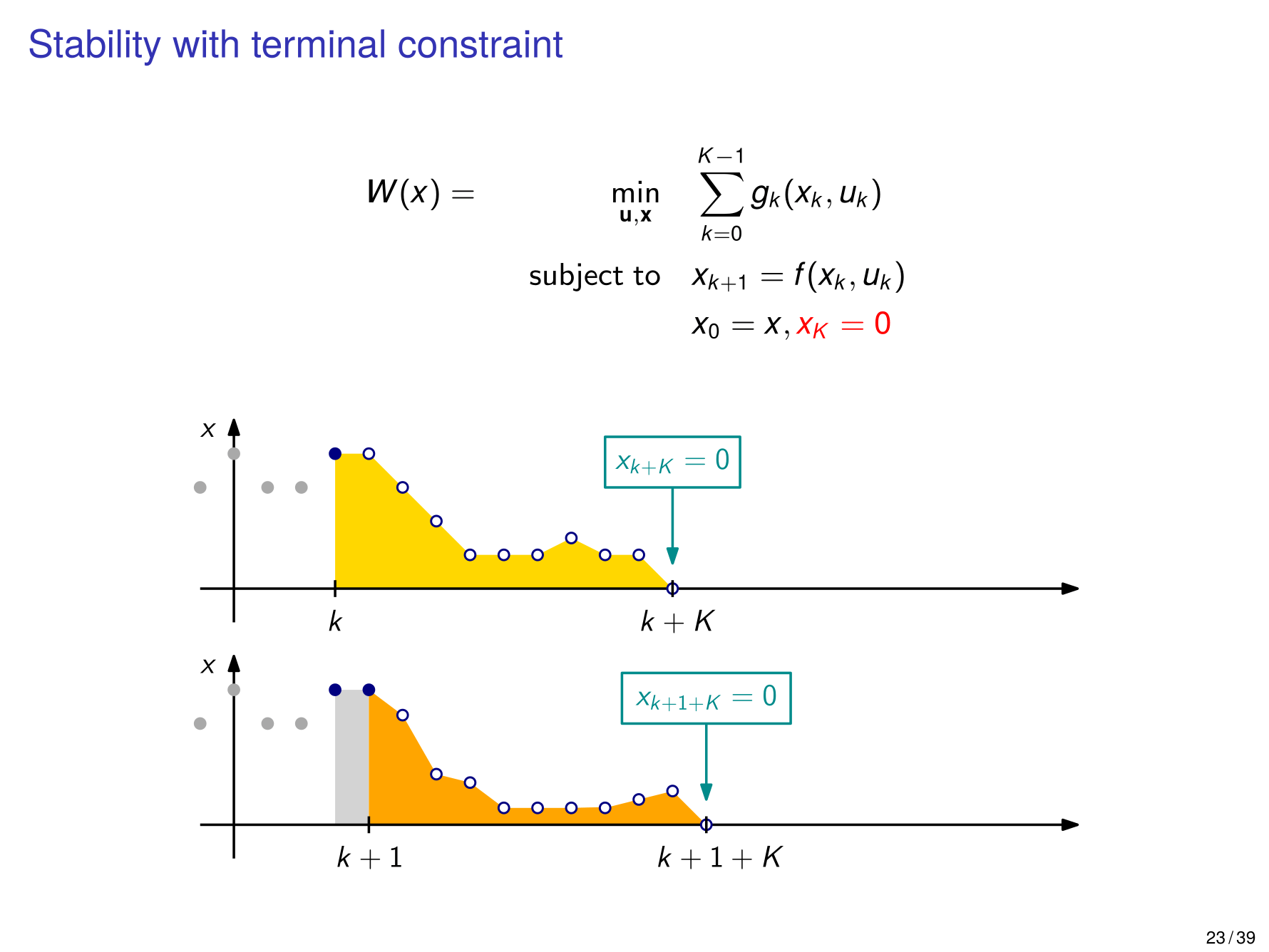
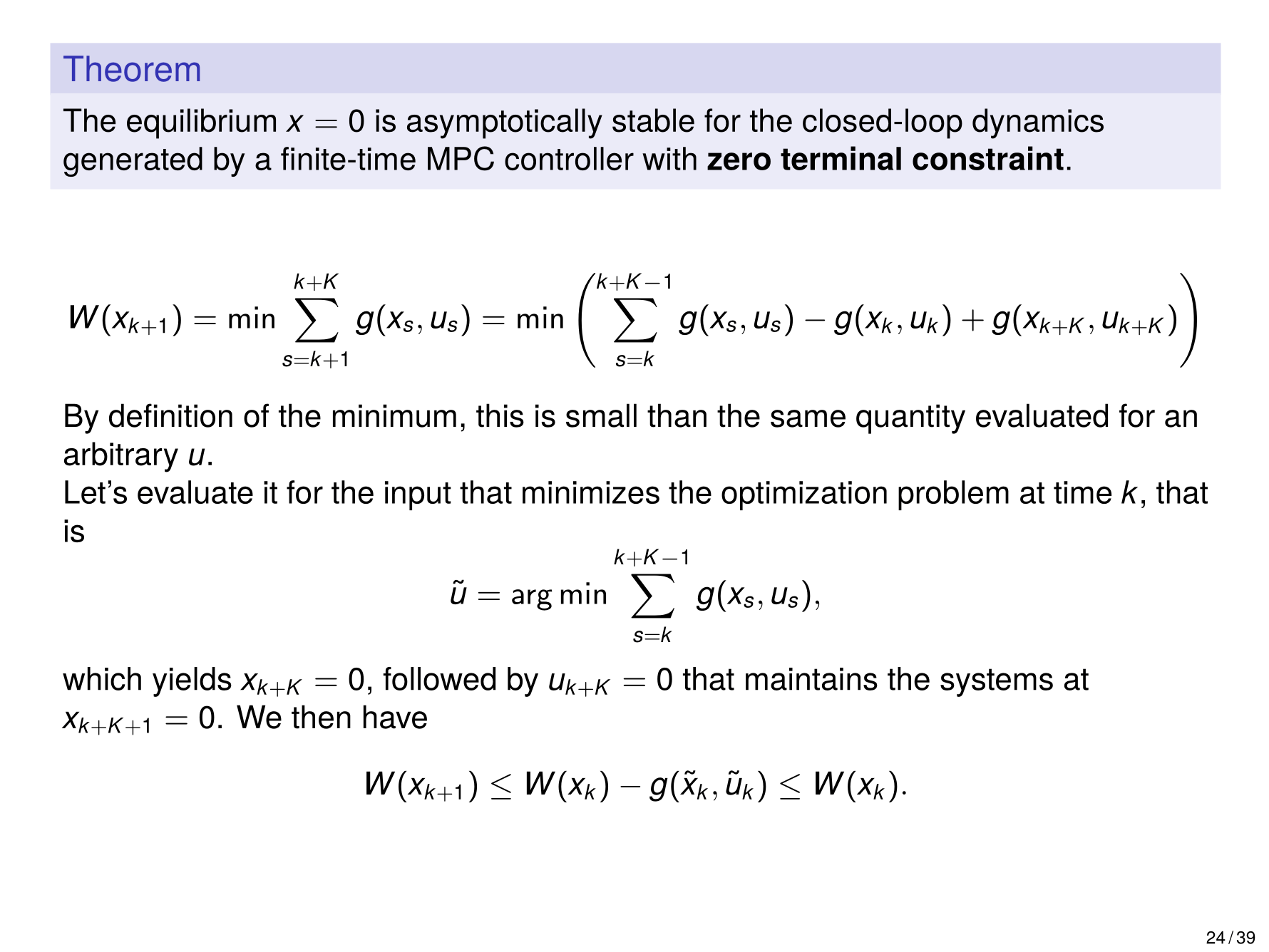
- Closed-loop stability (Lyapunov)
- Steady-state selection, disturbance rejection
Economic MPC
- Economic cost of trajectories
- Average performance guarantees
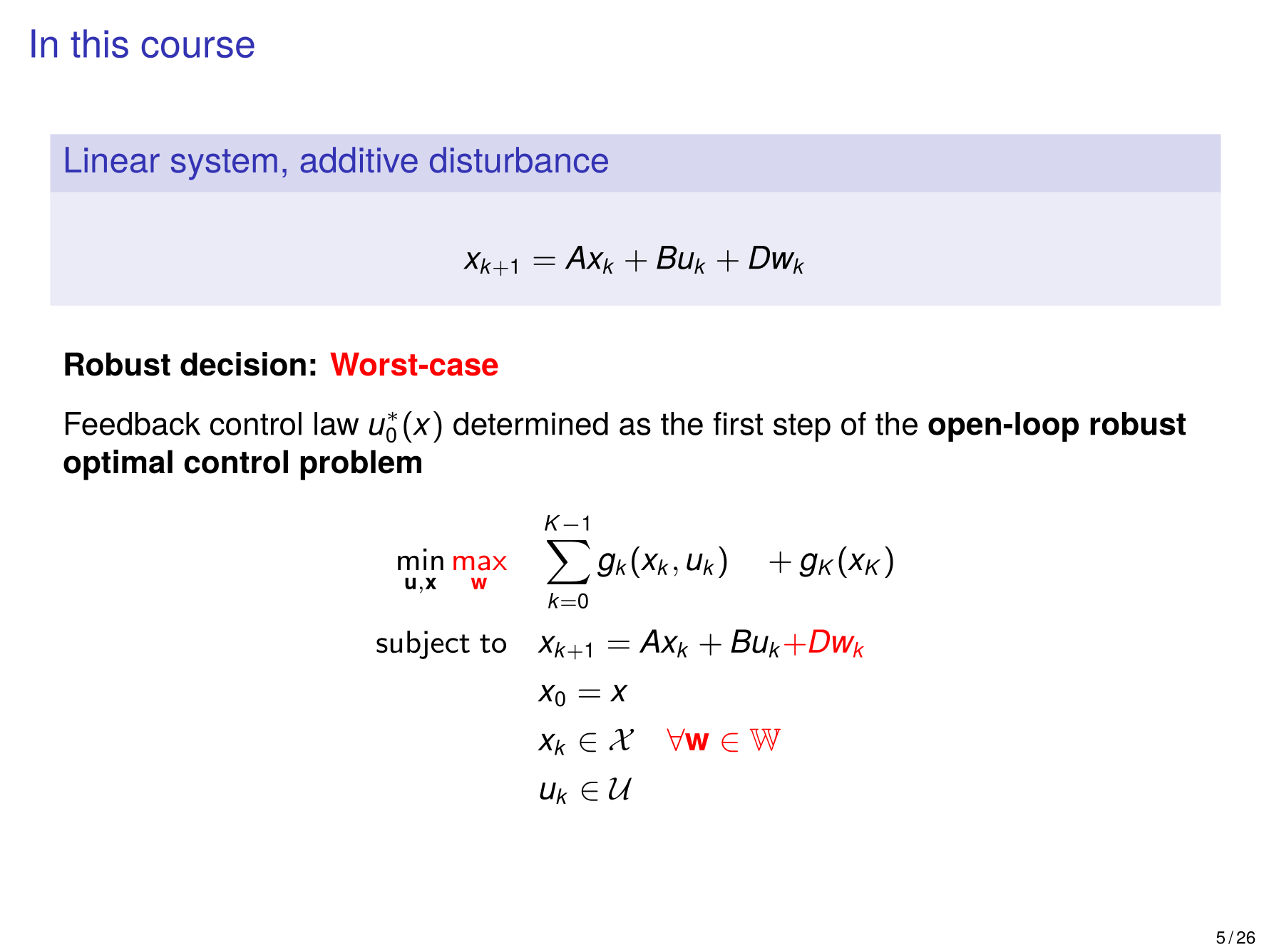
Robust MPC
- Robust satisfaction of constraints
- Closed-form solution for worst-case LQR
- MPC with disturbance feedback

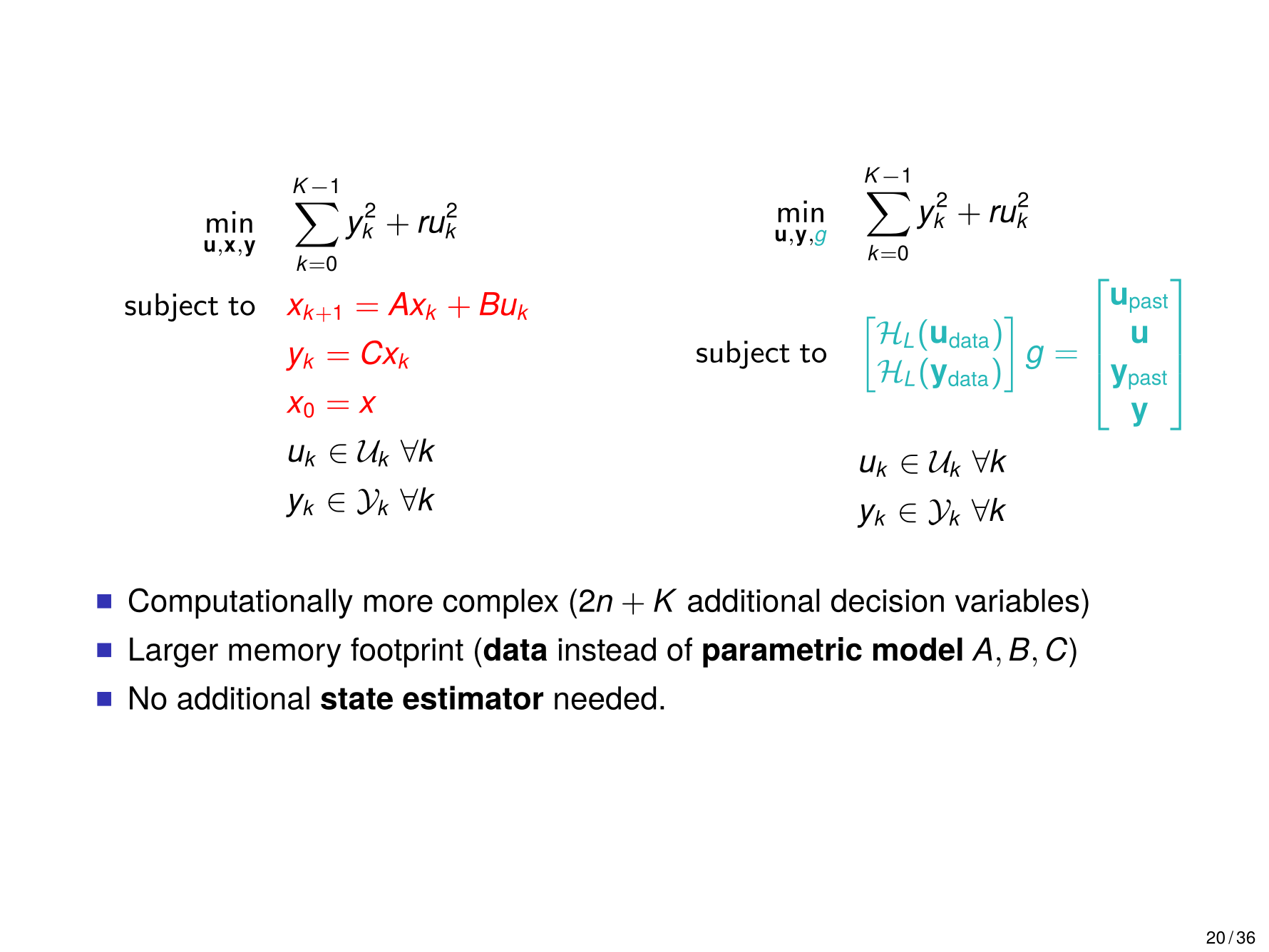
Data-Driven Predictive Control
- State-space identification (Kalman Ho)
- System trajectories as behavioral representation (LTI)
- Data-Driven Predictive Control vs MPC
- Regularization and noise
Markov Decision Processes
- Dynamic programming on MDPs
- Value iteration and policy iteration algorithms
Monte Carlo Learning
- Q function
- Experimental policy evaluation (episodic)
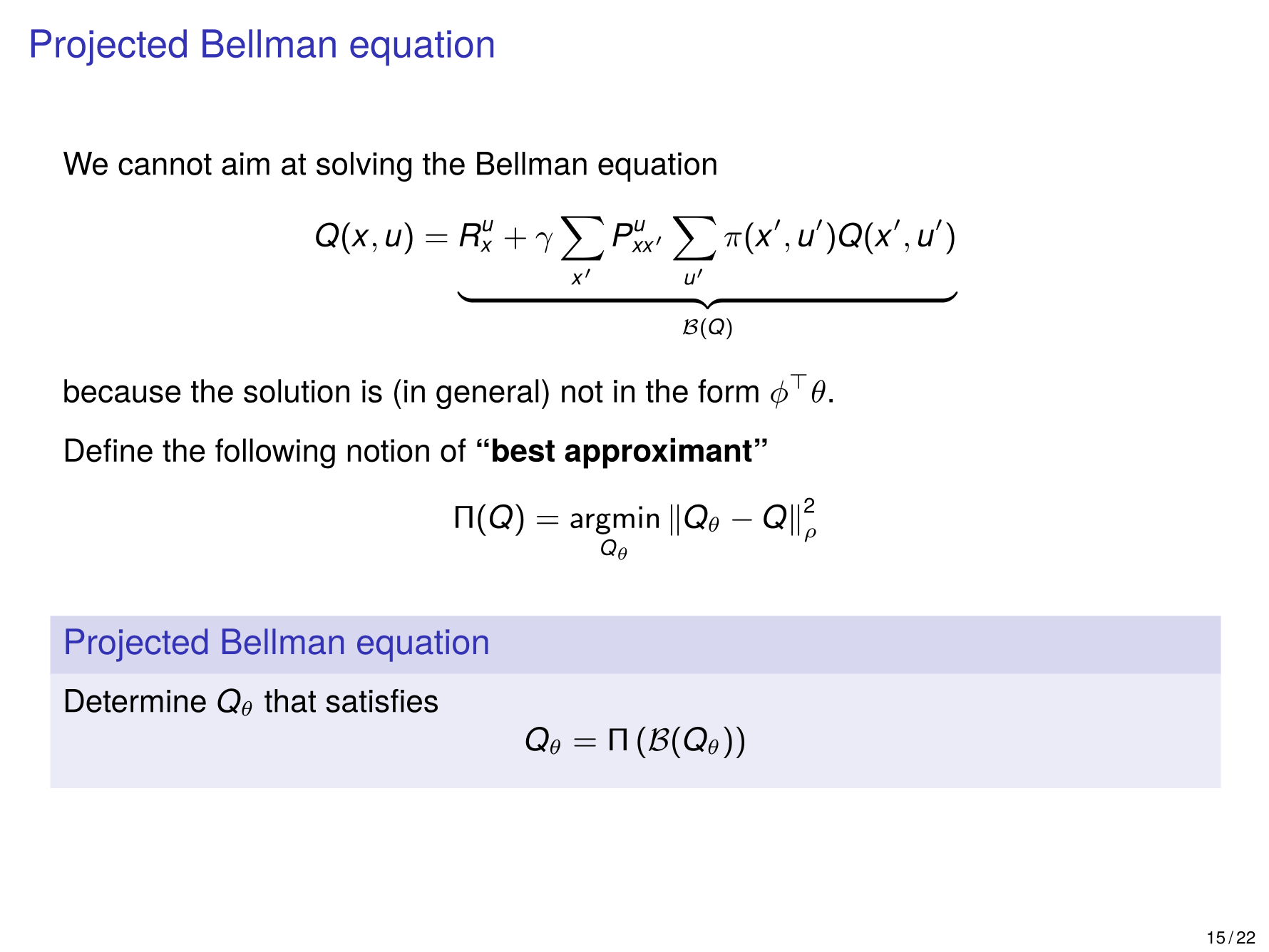
- Approximations: linear approximants
Reinforcement Learning
- Stochastic approximations and stochastic gradient
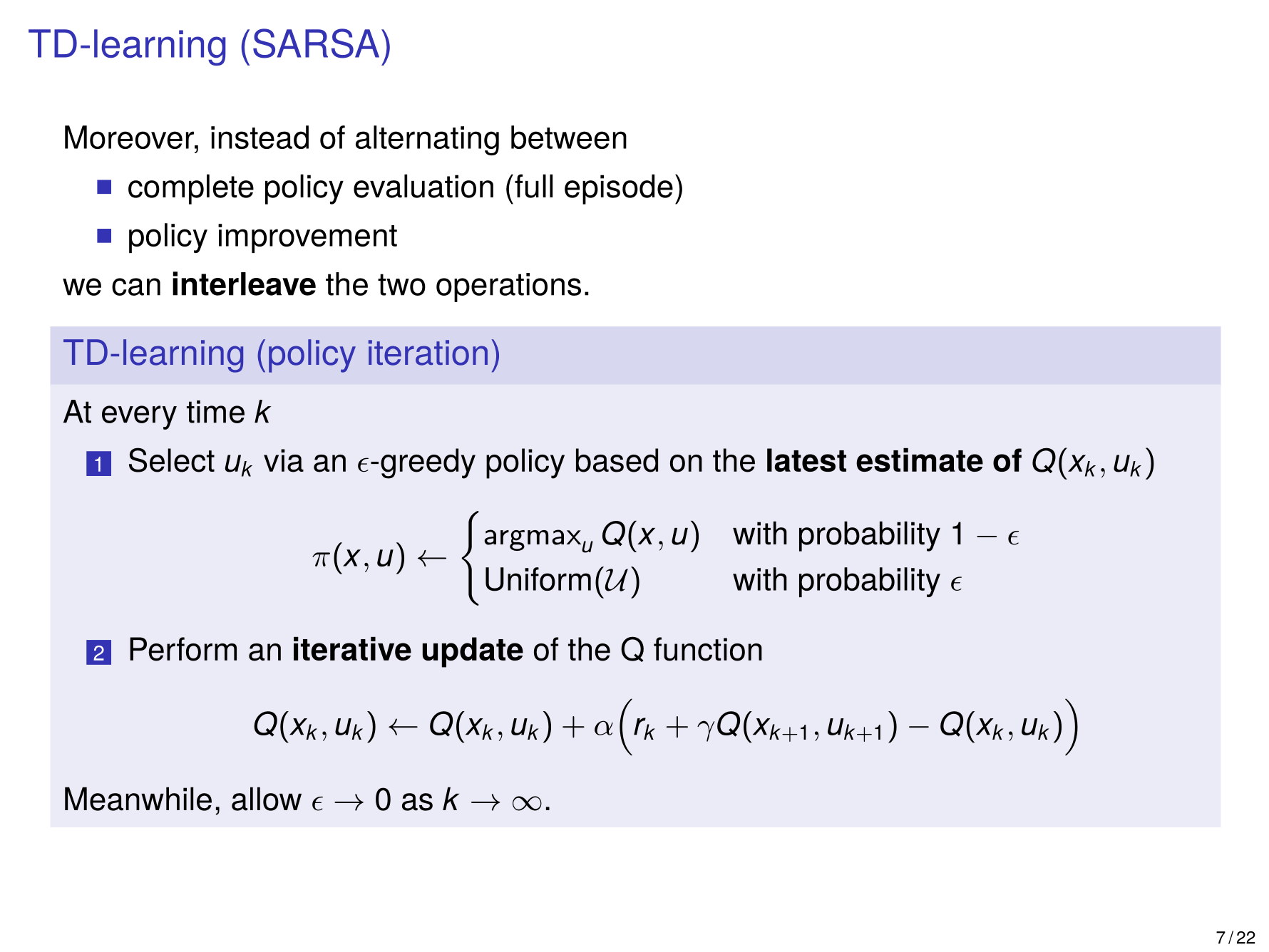
- TD-learning / SARSA
- Q learning
- Policy gradient

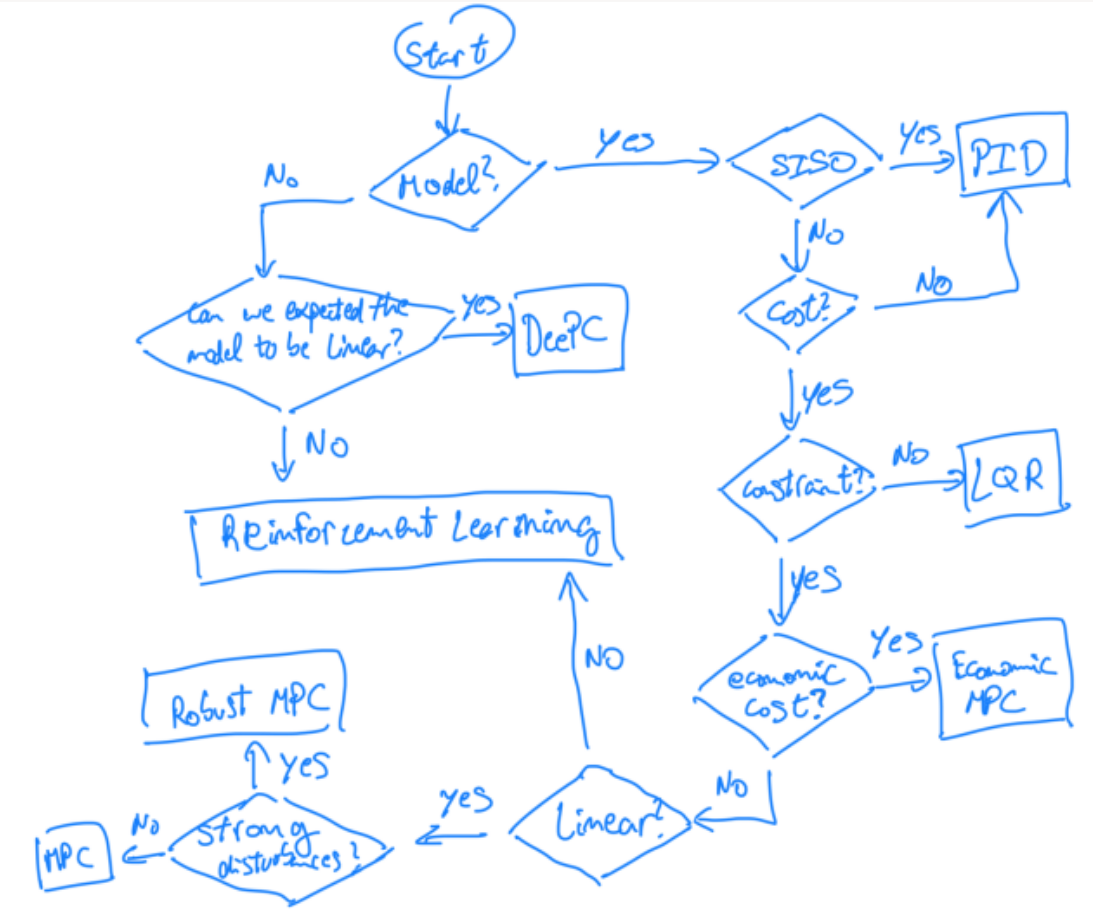
"Control Engineer Flowchart"
- In-class activity
- At the end of every module (LQR, MPC, Economic MPC...)
- Every student identifies the deciding factors that make them recommend one control strategy compared to another one, and organize them in a flowchart
- "Are constraints an important part of the problem?"
- "Do we have a reliable model for the system?"
- "Do we have a simulator for the system?"
- A few students present their flowchart
and defend it in front of the class. - The flowchart grows week after week.
"Control Engineer Flowchart"
Project
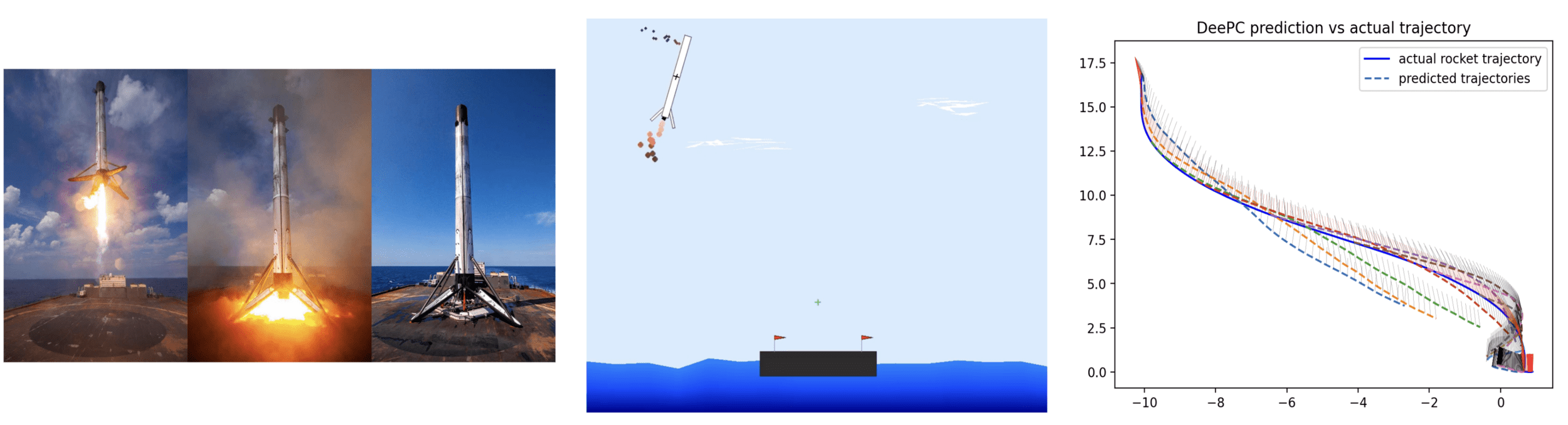
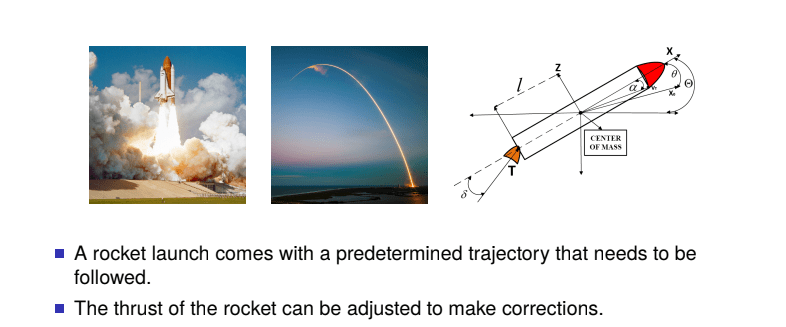
You are a control expert, and you are asked to act as a consultant for an aerospace company. This company wants to hear your opinion on their rocket landing control scheme.
You are provided with
- a simulator of the rocket landing dynamics,
- a linearized model of the rocket derived by their engineers,
- specifications of the control problem (limits on the actuators, constraints on the landing),
- a basic working controller (PID-type) that is already implemented in the simulator.
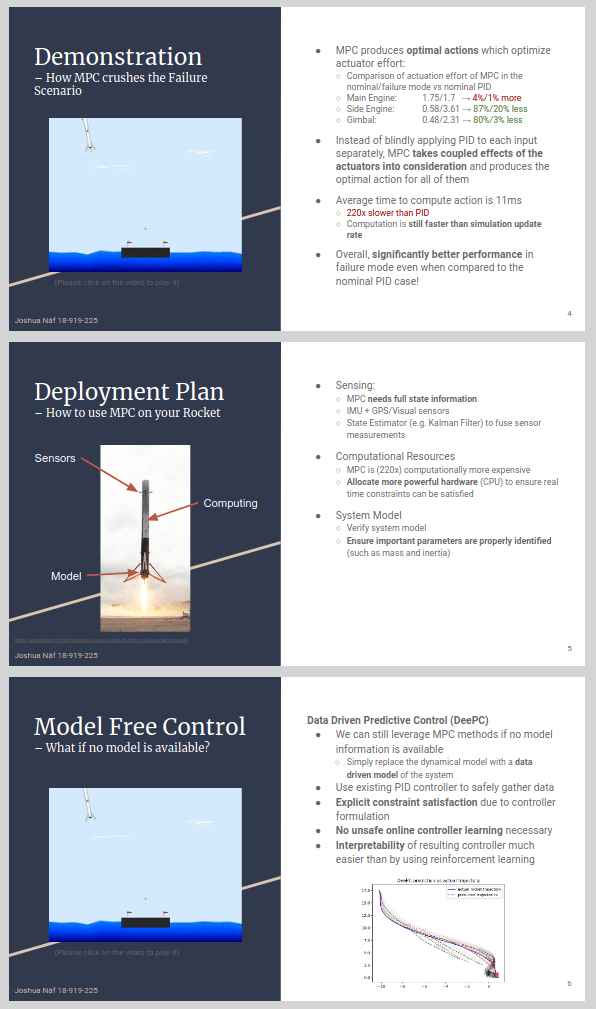
2023 Project
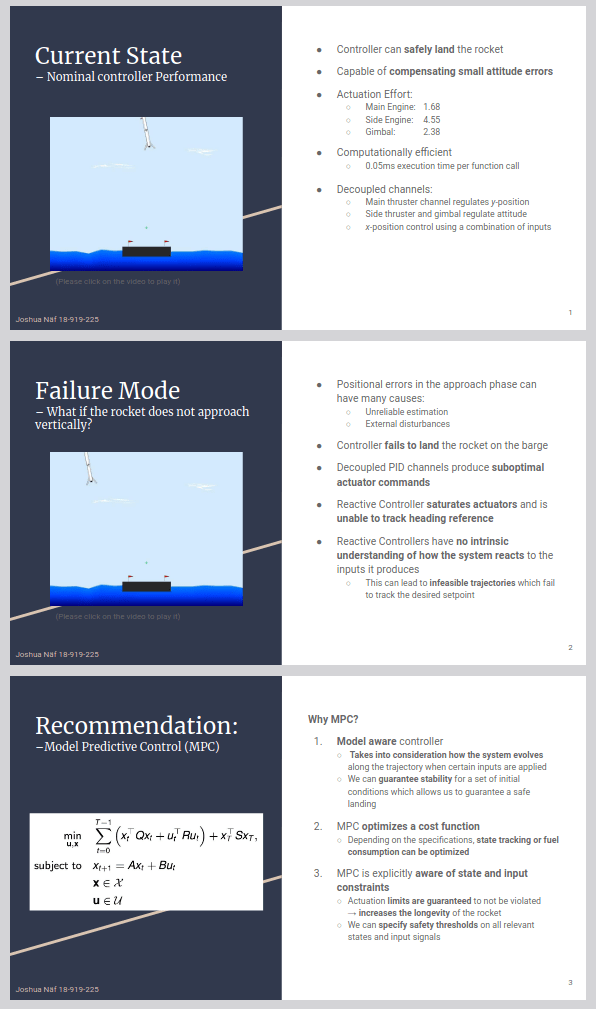
First deliverable
You need to prepare a 5-slide presentation for the company's Chief Technology Officer to explain what type of controller you would recommend and show how it outperforms their current controller in an important failure scenario.
- Current state: Show how the current basic controller performs in the standard operating condition
- Failure mode: Motivate the need for a better controller. Find a compelling failure scenario that is plausible but that their controller cannot handle well.
- Your recommendation: Explain what type of controller you would recommend, providing the three most important reasons.
- Demonstration: Illustrate how your controller outperforms their current controller in the failure scenario.
- Deployment plan: Plan the necessary steps needed in order to deploy the controller that you proposed.
Constructive alignment
Second deliverable
You also need to prepare a Jupyter notebook for the company's technical team so that they can understand what you are proposing.
- How the failure scenario has been modeled in the simulation.
- What parameters are available to define the failure scenario.
- How to implement the proposed controller.
- What parameters need to be tuned to design the controller.
- How do you recommend tuning it.
Constructive alignment

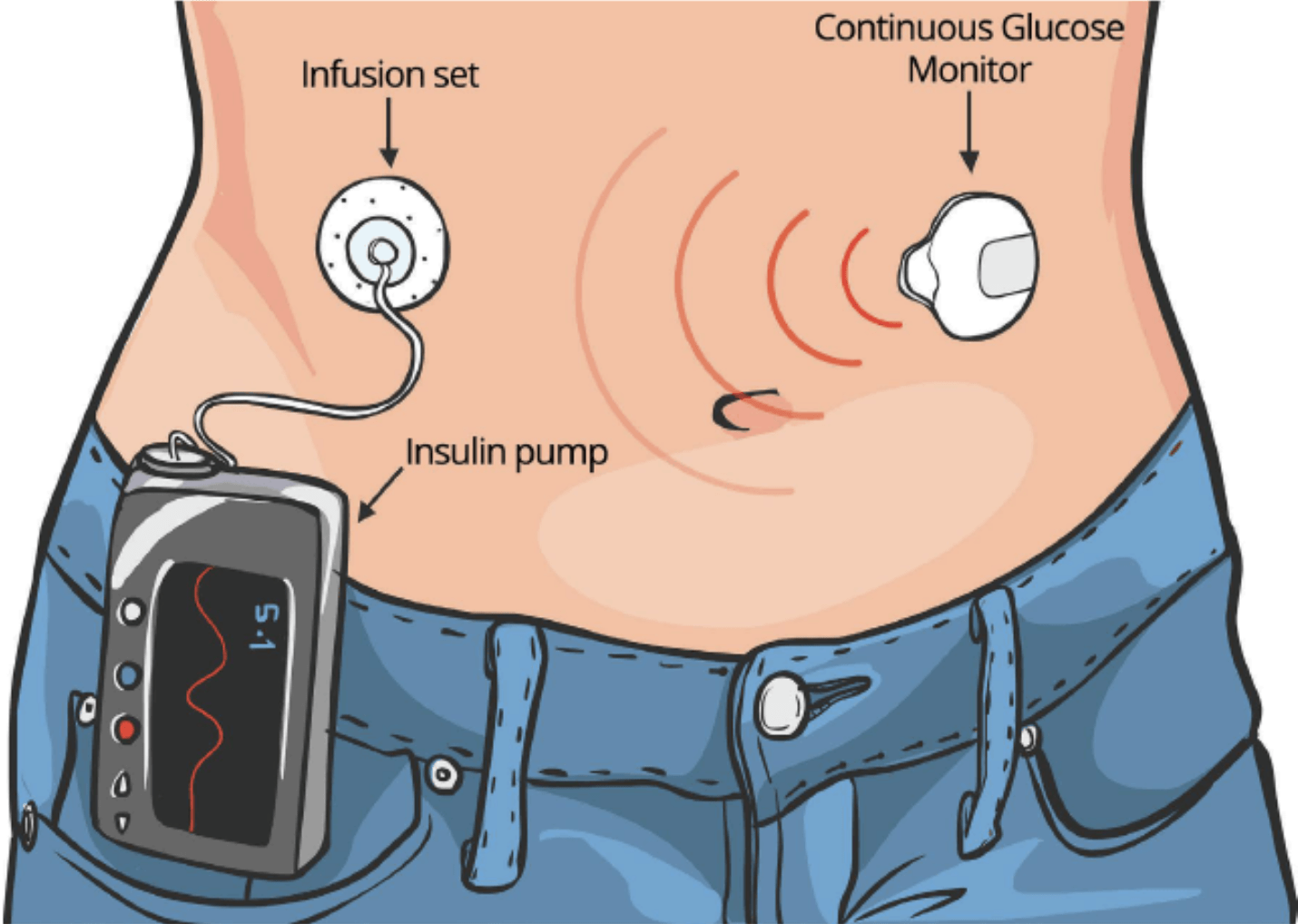
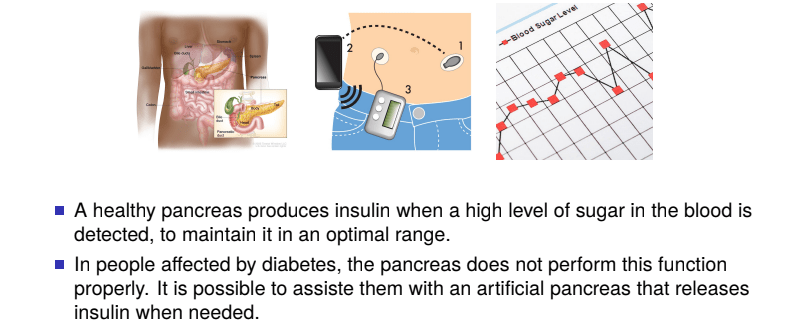
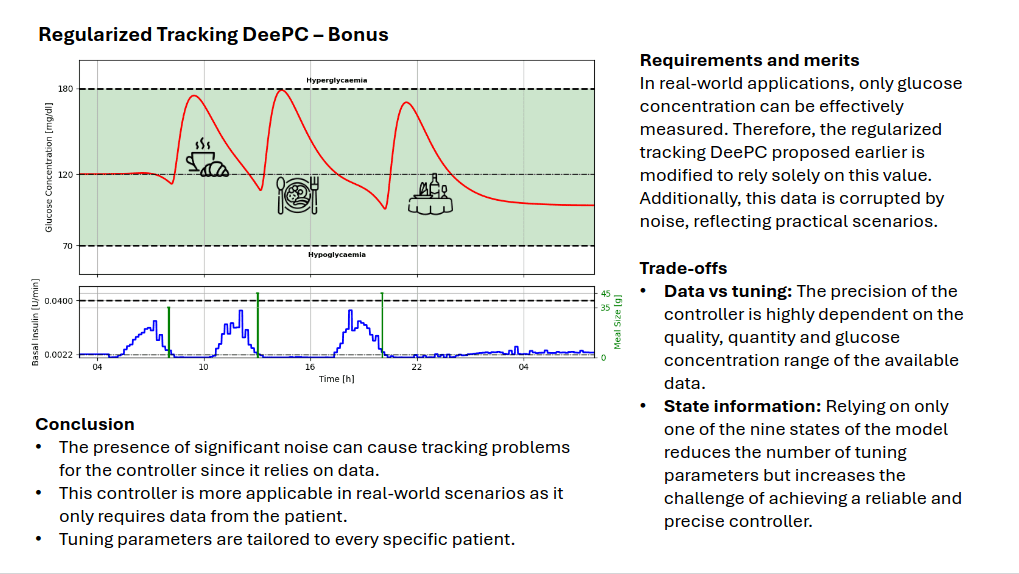
You are a control expert. You have been asked to act as a consultant for InsulinCo, a company that provides artificial pancreas (AP) care to patients with diabetes. Their AP uses an insulin pump to inject insulin in response to glucose measurements and meal predictions. InsulinCo would like to know if an advanced control method can improve the performance of their AP.
2024 Project
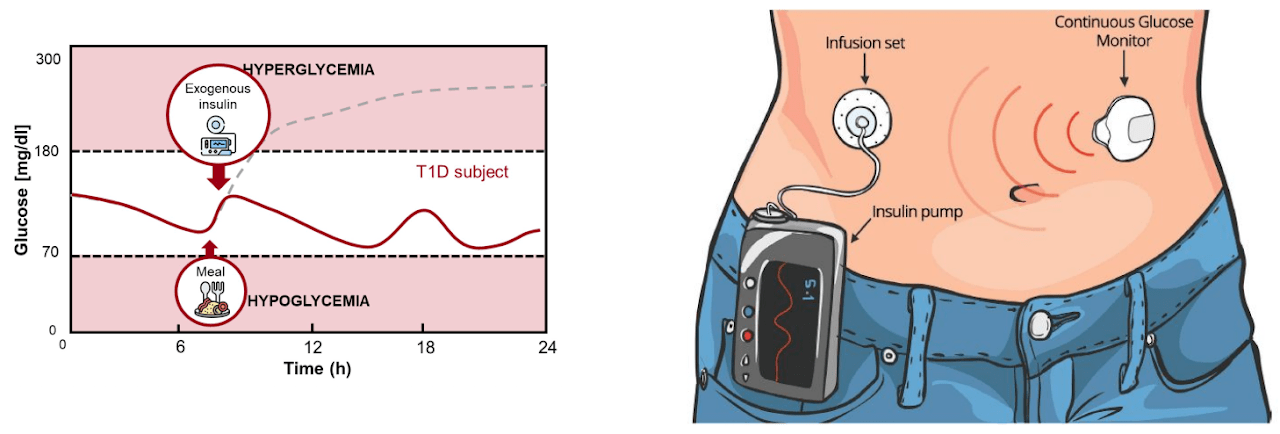
InsulinCo has provided you with
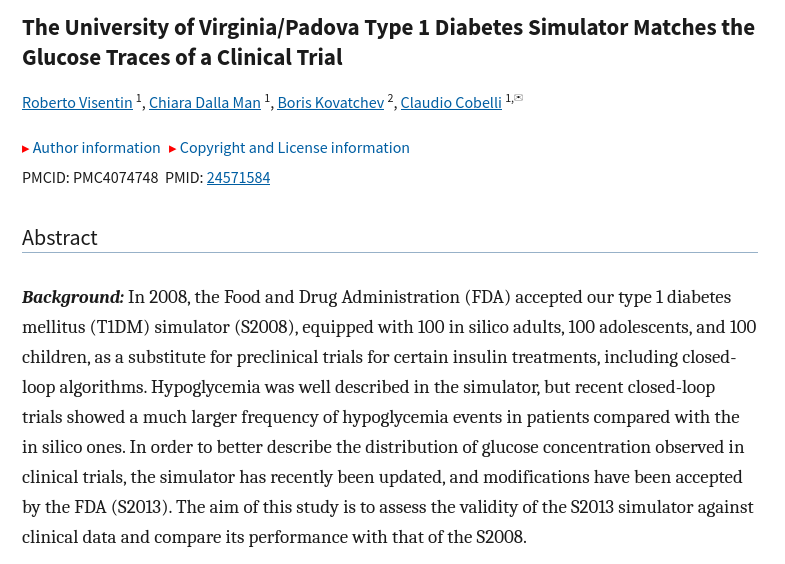
- the ReplayBg simulator, which simulates the nonlinear dynamics of a human glucose regulation mechanism.
- the time series data for a single sample patient.
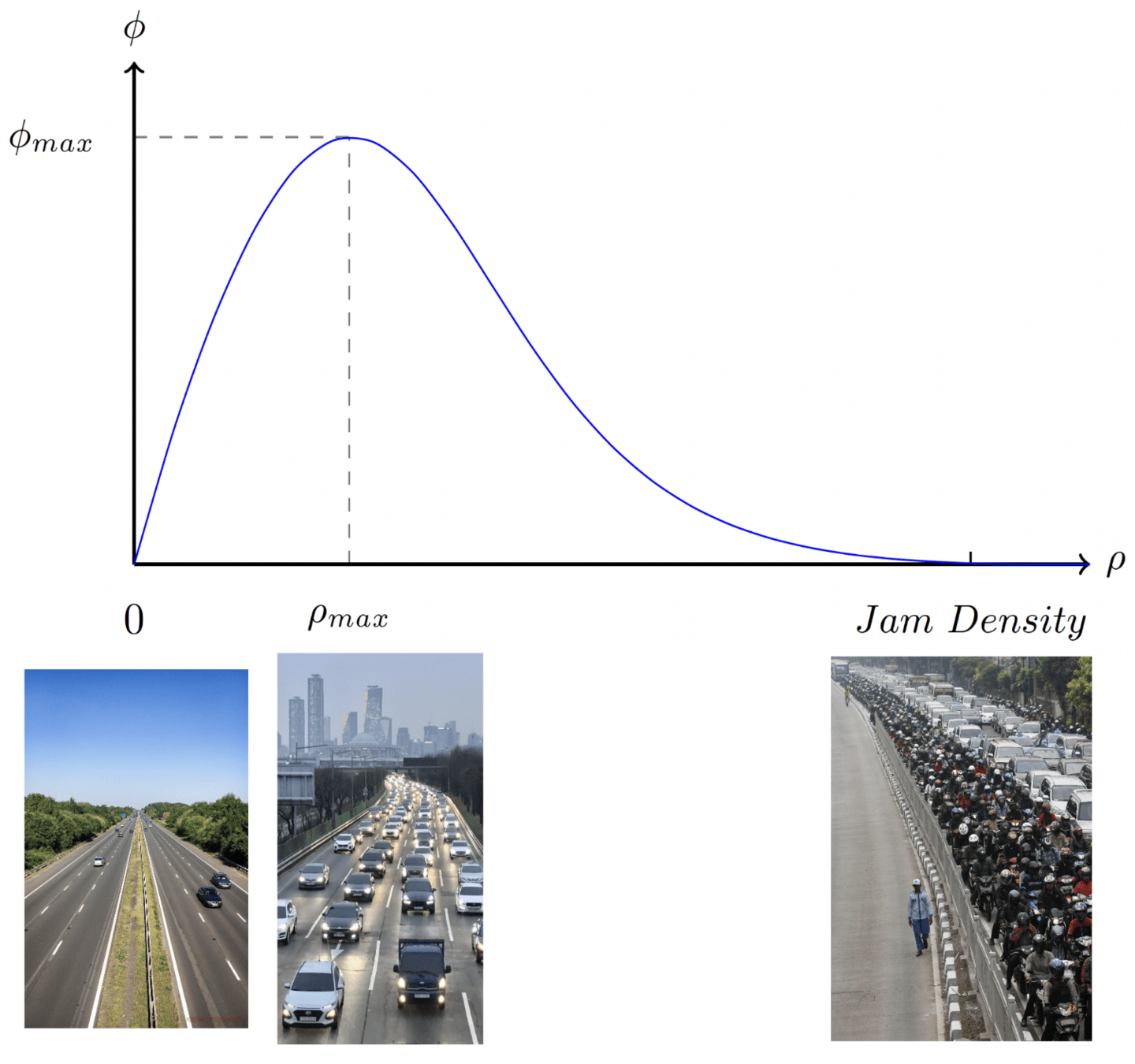
You are a control expert, and you are asked to act as a consultant for COCO City, a city that is having issues with traffic congestion.
2025 Project
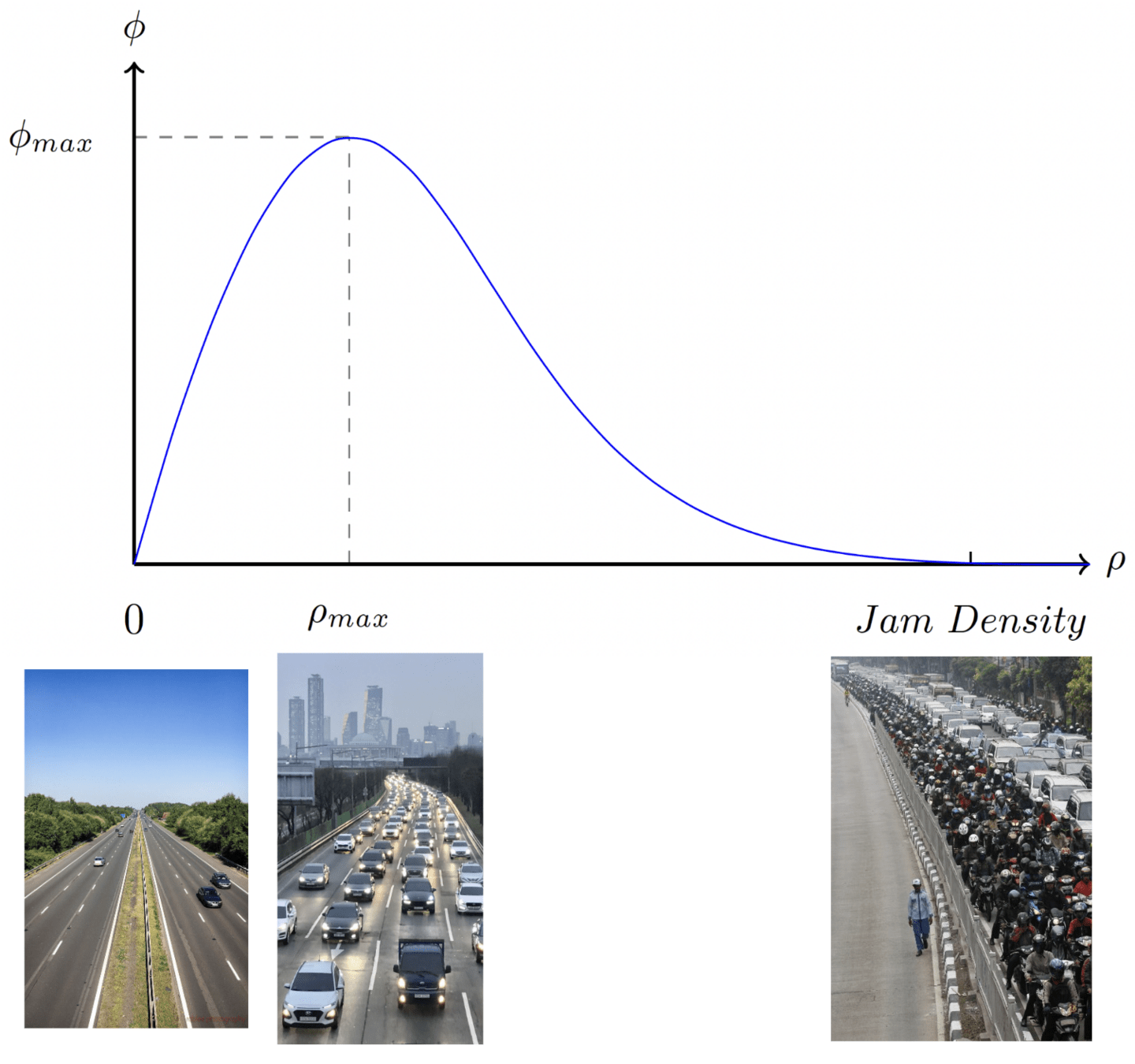
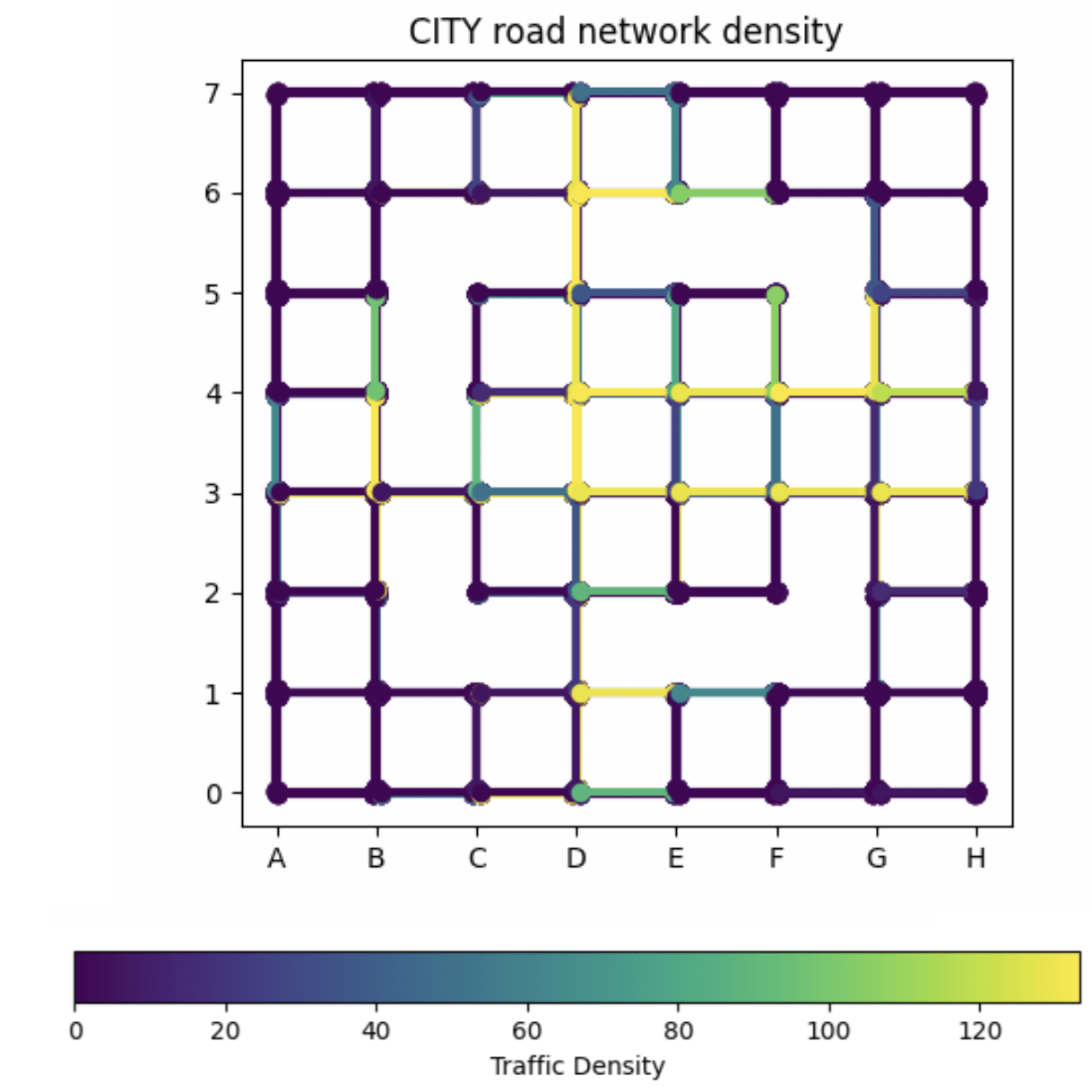
You are a control expert, and you are asked to act as a consultant for COCO City, a city that is having issues with traffic congestion.
2025 Project
We will see about the results...
How has COCO been received by the students?

2023 Golden Owl
teaching award
awarded by the ETH Zurich student association VSETH
Sophie Hall
Nicolas Lanzetti
Alberto Padoan
Keith Moffat

Saverio Bolognani
How has COCO been received by the students?
Where did COCO come from?
?
Where did COCO come from?
a confused PhD student
a slightly-less confused postdoc
My story:
Sophie Hall
Nicolas Lanzetti
Alberto Padoan
Keith Moffat
Feiran Zhao
Jonas Matt
Andras Sasfi
Saverio Bolognani
Mohamed Abdalmoaty
Alessio Rimoldi
Student TAs:
Gerasimos Maltezos
Dylan Vogel
Henrique Caraca
Jordan Hong
Eric Aschari
Where did COCO come from?

Where did COCO come from?
Where does COCO go from here?
Point 1: ETH is a special place for curriculum development
Point 2: ETH curriculum is contagious
Where does COCO go from here?
Point 1: ETH is a special place for curriculum development
Point 2: ETH curriculum is contagious
Options:
be proactive
or
pretend contagion does not exist

Where does COCO go from here?
Options:
- In-house model: COCO stays at IfA, IfA develops the curriculum, ETH students take the course and go forth into the world
- Export model: We export a "frozen" version of the COCO curriculum, with the IFA and ETH logos on it
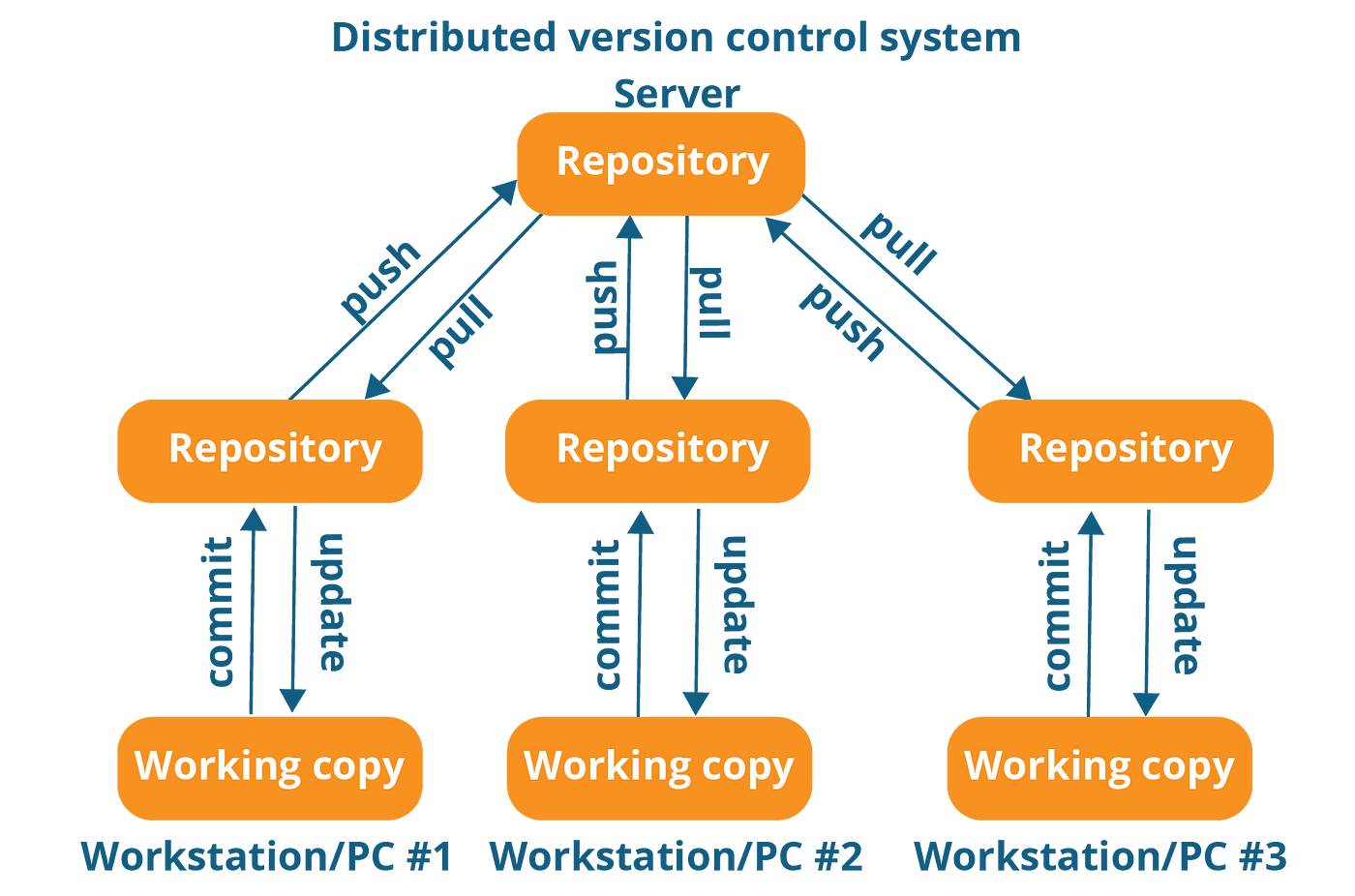
- Git model: we open-source the curriculum, allowing for others to add on to the curriculum with branches, while maintaining the master branch

Sophie Hall
Nicolas Lanzetti
Alberto Padoan
Keith Moffat
Feiran Zhao
Jonas Matt
Andras Sasfi
Saverio Bolognani
Mohamed Abdalmoaty
Alessio Rimoldi
Student TAs:
Gerasimos Maltezos
Dylan Vogel
Henrique Caraca
Jordan Hong
Eric Aschari
Thanks!