*chto@uchicago.edu
Synergies between Roman and Rubin: Weak Lensing point of view
Chun-Hao To*
Roman High Latitude Imaging Survey Project Infrastructure Team (HLIS-PIT)
- We build pipelines to enable Roman's 3x2pt + cluster science.
- Shear catalogs and calibrations (such as m, photo-z, ...).
- Lens and cluster catalogs and calibrations (such as weights, photo-z, ...).
- Associated products for the above, such as coadd images, PSF, theory pipeline...
- See https://roman-hlis-cosmology.caltech.edu/page/products for expected products and timeline.
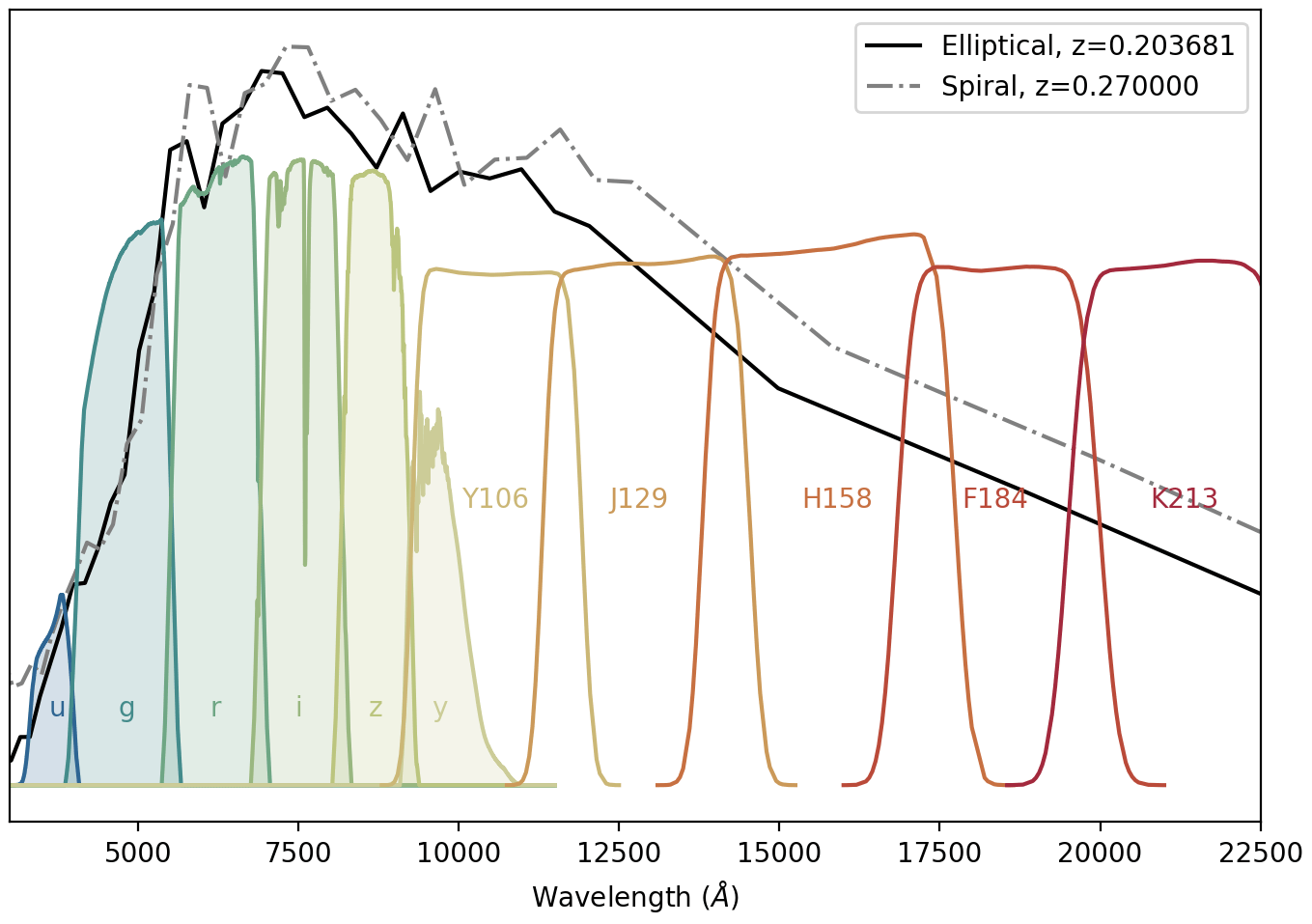
- Wavelength coverage
Synergies between Roman and Rubin
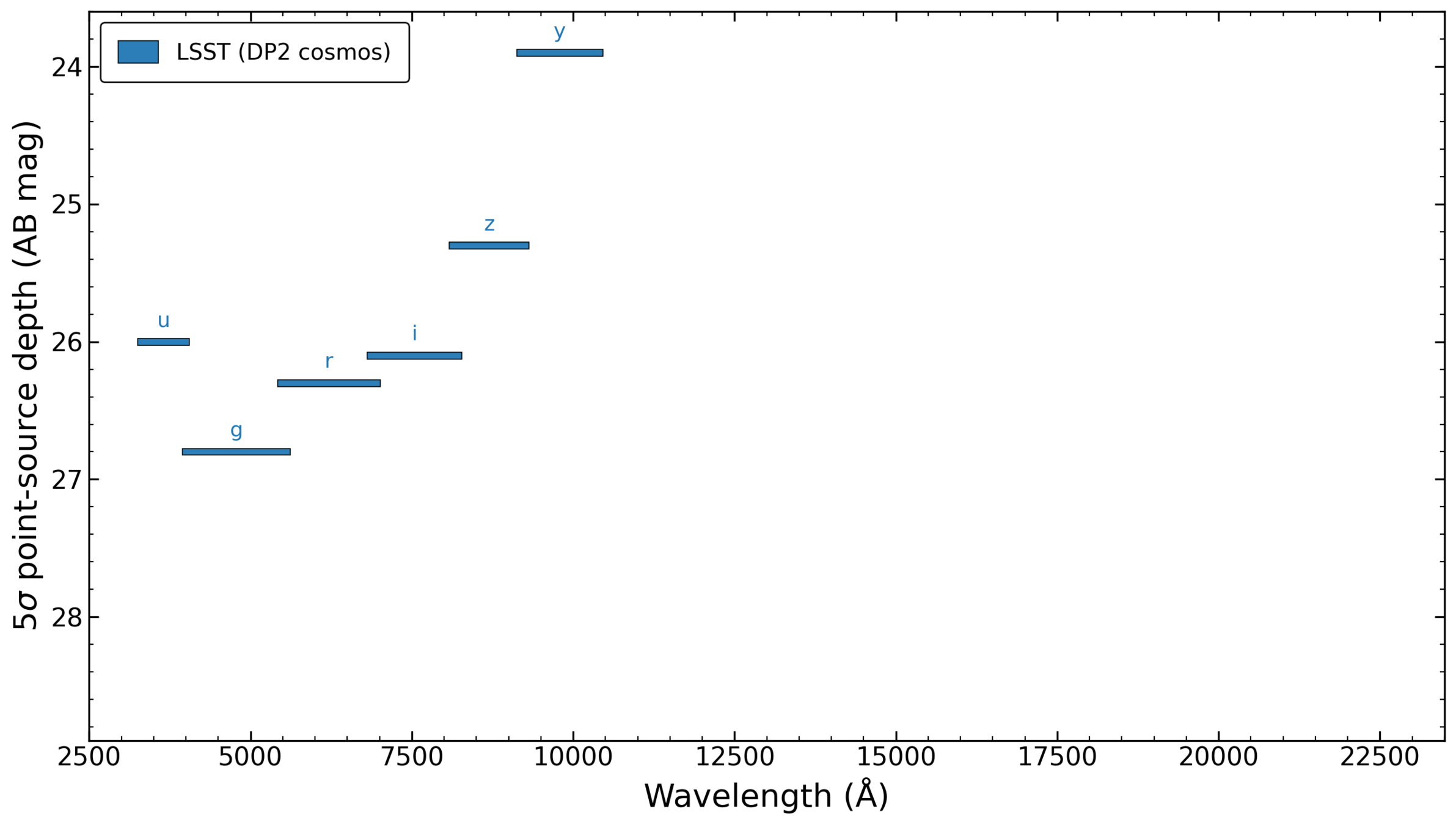
https://rtn-011.lsst.io/
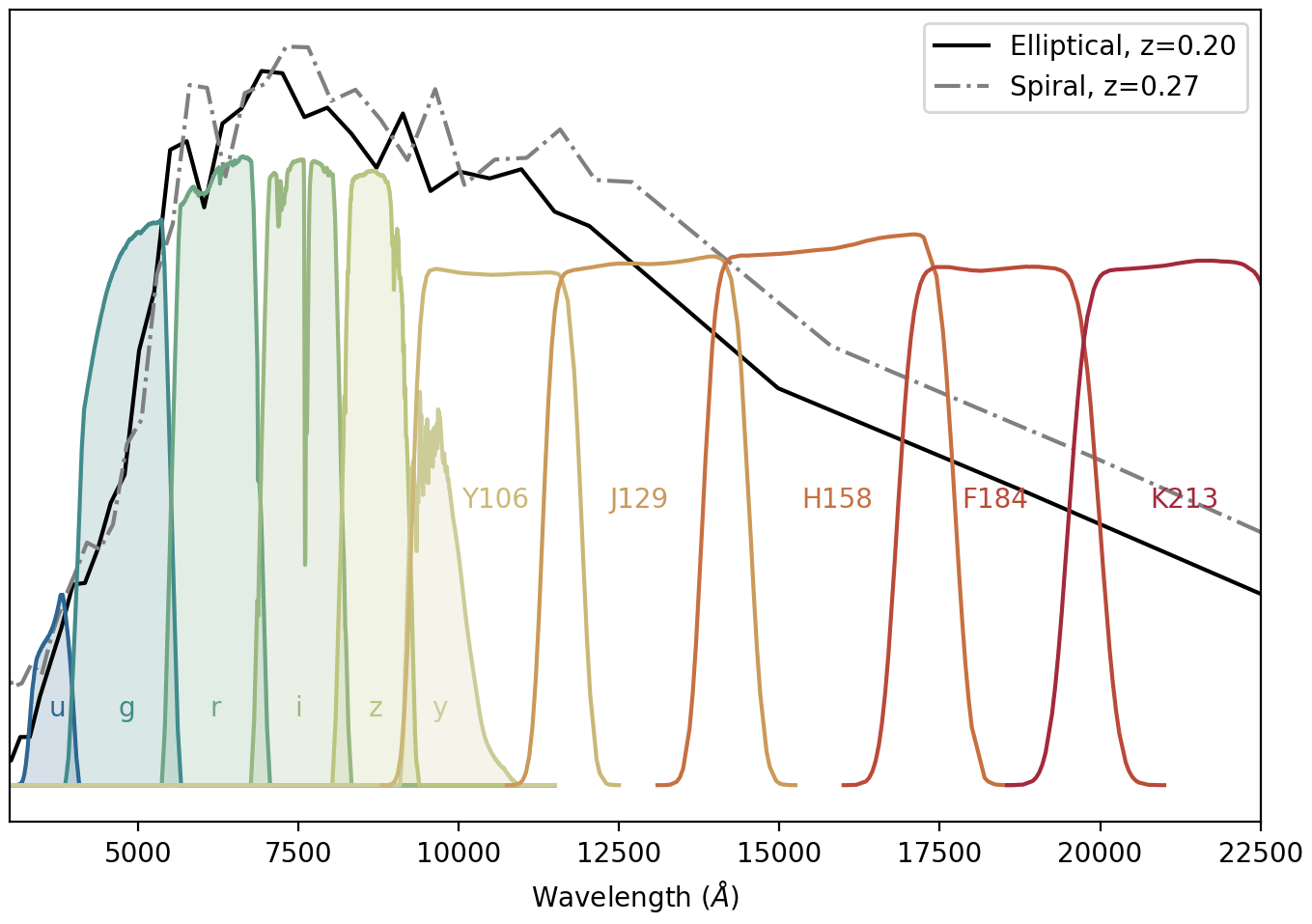
- Wavelength coverage
- Roman will help Rubin Photo-z
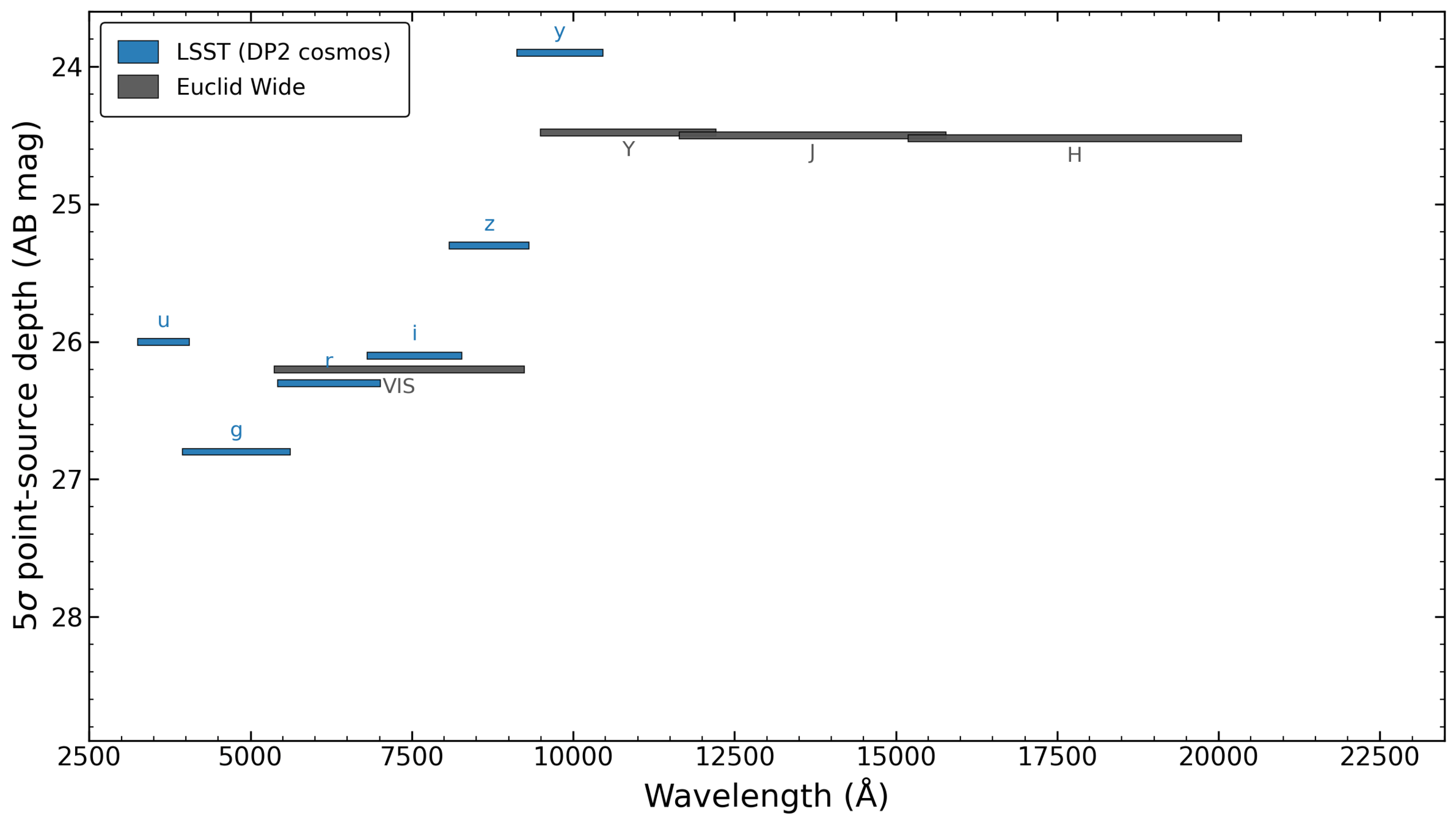
Synergies between Roman and Rubin
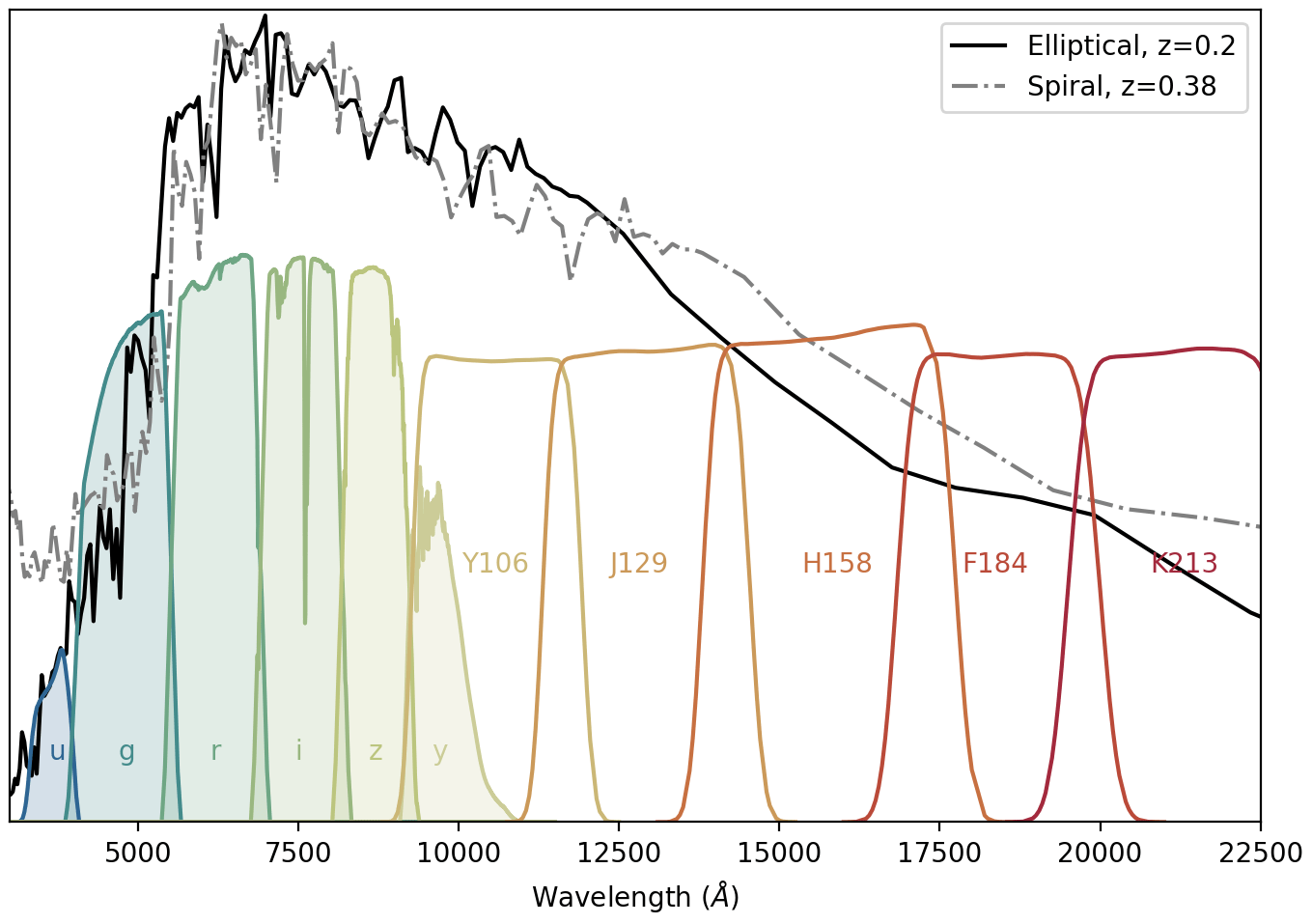
- Wavelength coverage
- Rubin will help Roman Photo-z
Synergies between Roman and Rubin
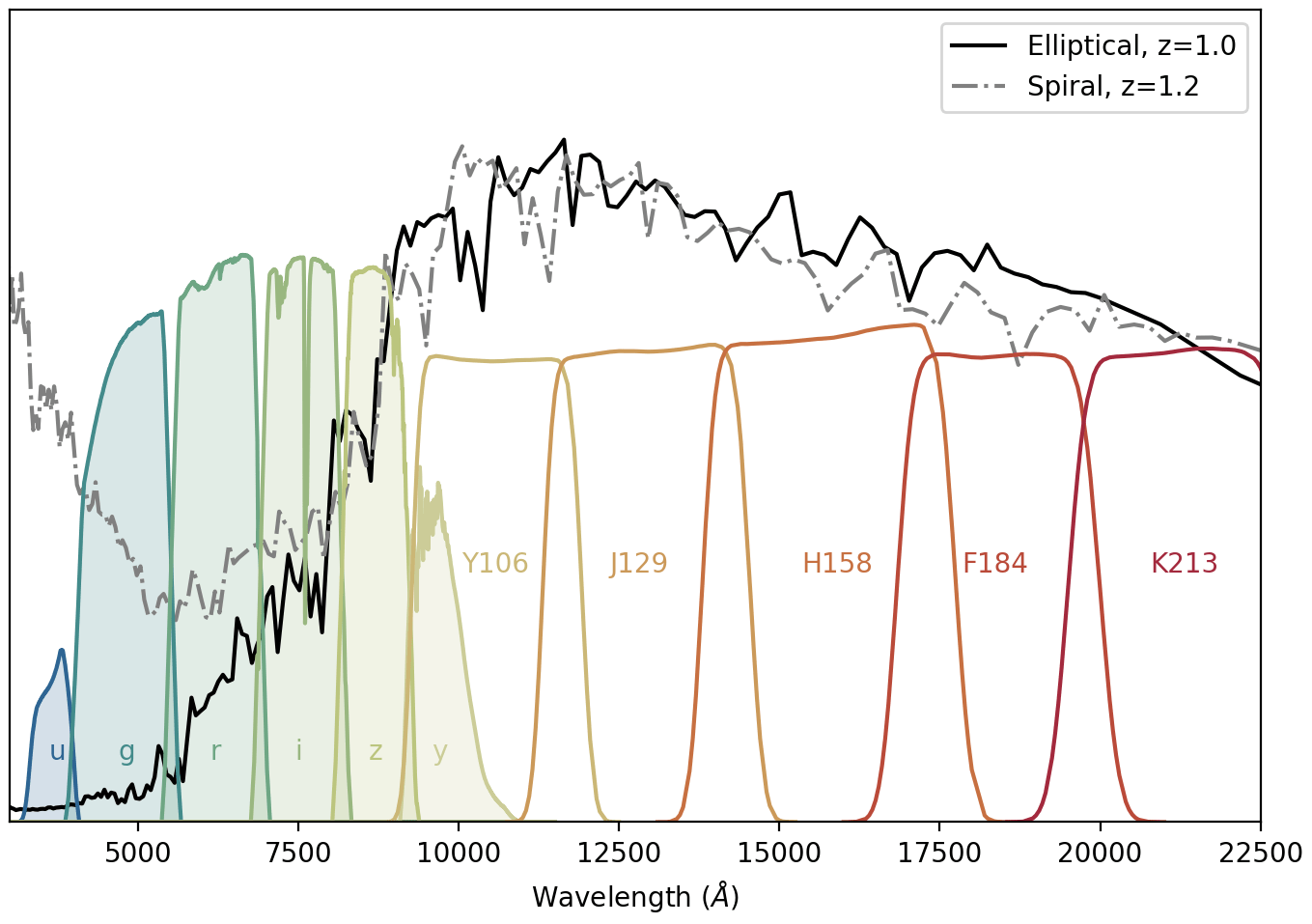
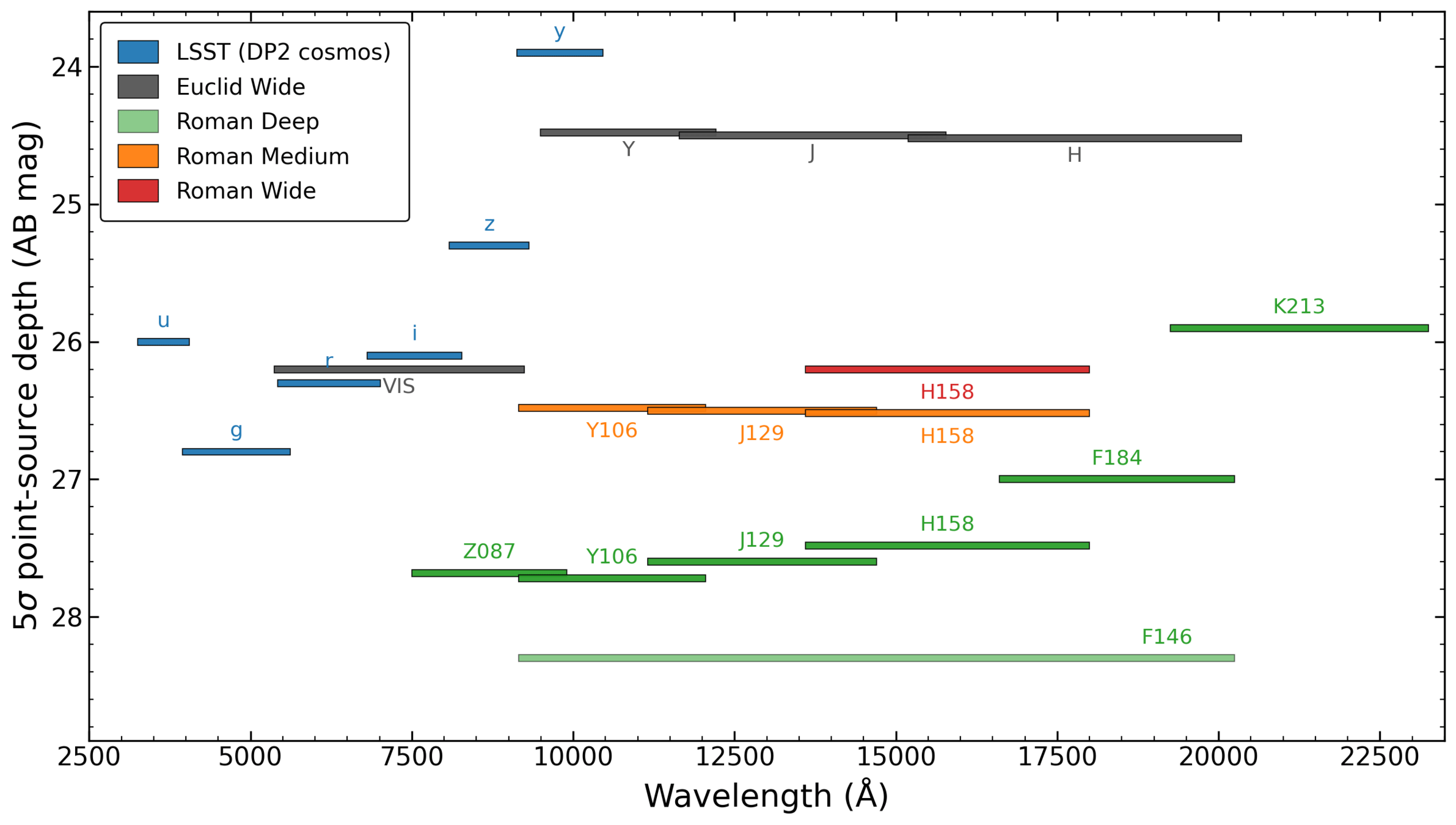
- Wavelength coverage
- Both Roman and Rubin need spec-z for photo-z.
Synergies between Roman and Rubin
Cosmos DDF
XMM DDF
20k-30k spectra with H depth of ~24.5 (AB), subsampled to have flatter mag distribution.
Contact:
Brett Andrews, Jeff Newman,
Dan Master.
- Wavelength coverage
- Photo-z.
Synergies between Roman and Rubin
- Wavelength coverage
- Photo-z.
- Resolution:
- Rubin: PSF ~0.7" FWHM
- Roman: ~0.1" FWHM
Synergies between Roman and Rubin

We are expecting to get to this depth in COSMOS DDF ~ summer 2027
Performance: Rubin
Rubin Y5
Roman Medium Tier
Rubin detection
Roman detection
-
Wavelength coverage
-
Photo-z.
-
-
Resolution:
-
Deblending.
-
Star-galaxy separation.
-
Synergies between Roman and Rubin
See also:
-
Roman Core Community Surveys White Paper: Coordinating Roman and Rubin for Cosmic Probes of Dark Matter with Resolved Stellar Populations (Bechtol+23).
-
OpenUniverse2024: A shared, simulated view of the sky for the next generation of cosmological surveys (Openuniverse+ 24).
- Forced photometry using Rubin coadd images based on Roman detections.
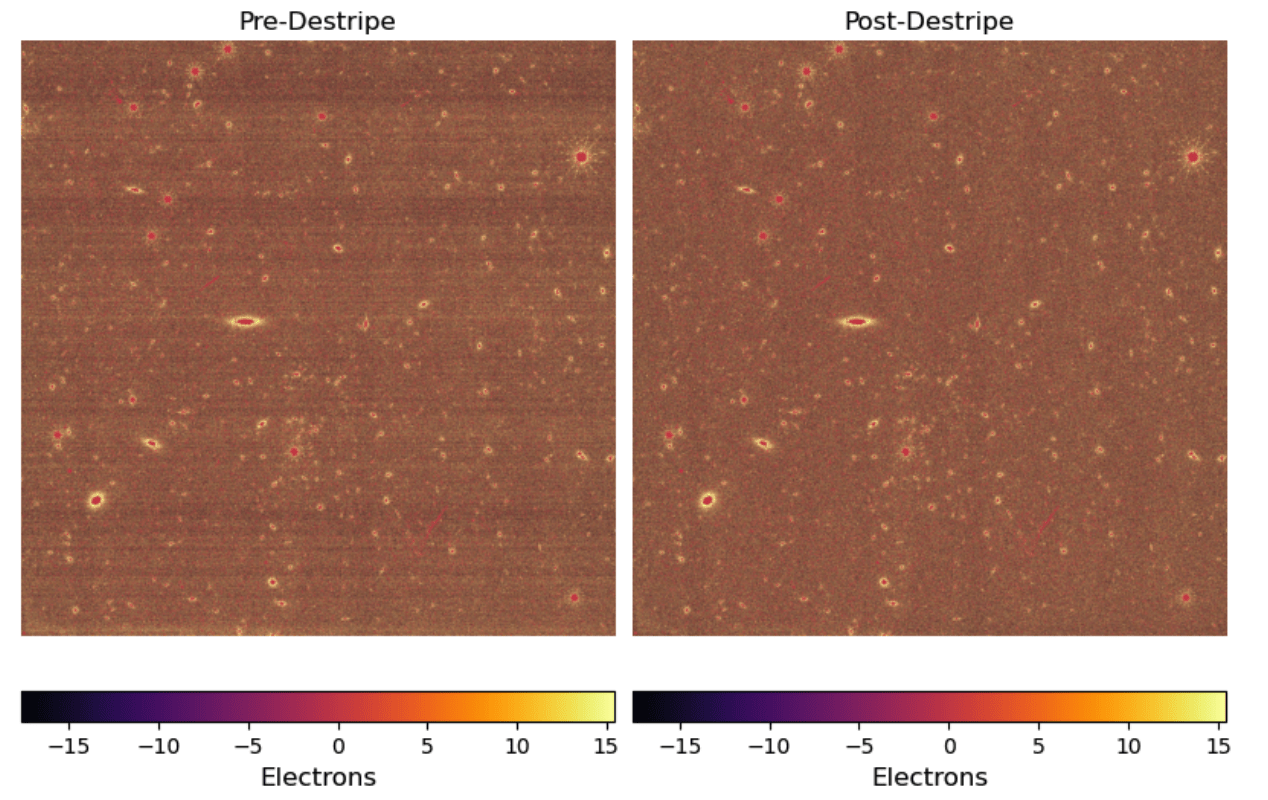
One step toward pixel-level synergies between Roman and Rubin
What are the unique challenges for Roman photometry?
- Ground-based telescope (LSST/DES):
Sky background ~ 2000 e/p/s vs Read noise ~ 8.8 e/p
Poisson shot noise. - Space-based telescope (Roman/JWST):
Zodiacal+thermal ~ 0.76 e/p/s vs Read noise ~ 8.5 e/p
readout noise is no longer negligible, which can be correlated across pixels (1/f noise).
Bagley+ 2022
Snowballs (Cosmic Ray)
JWST
1/f
WISP
(Stray light)
See also, Rauscher+22, Betti+ 24
Laliotis+ 25
ImDeStripe: method subtracting 1/f noise using multiple overlapping observations
Even with this, correlation remains
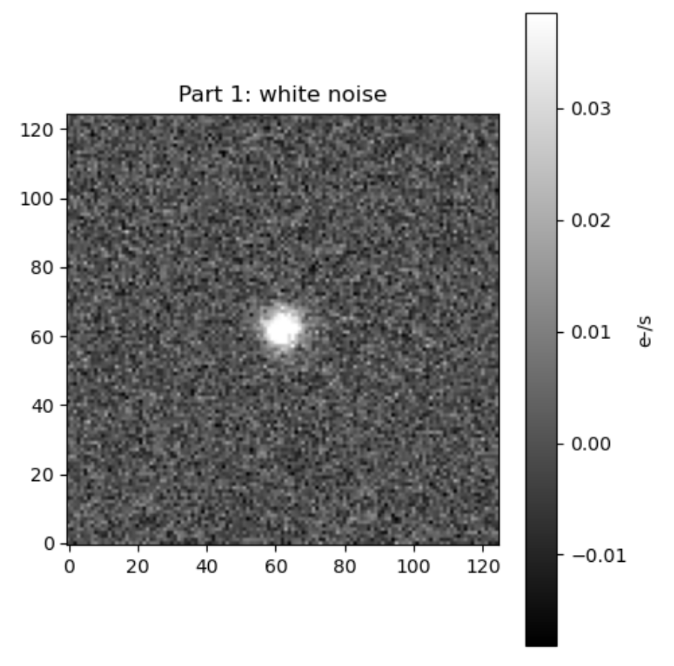
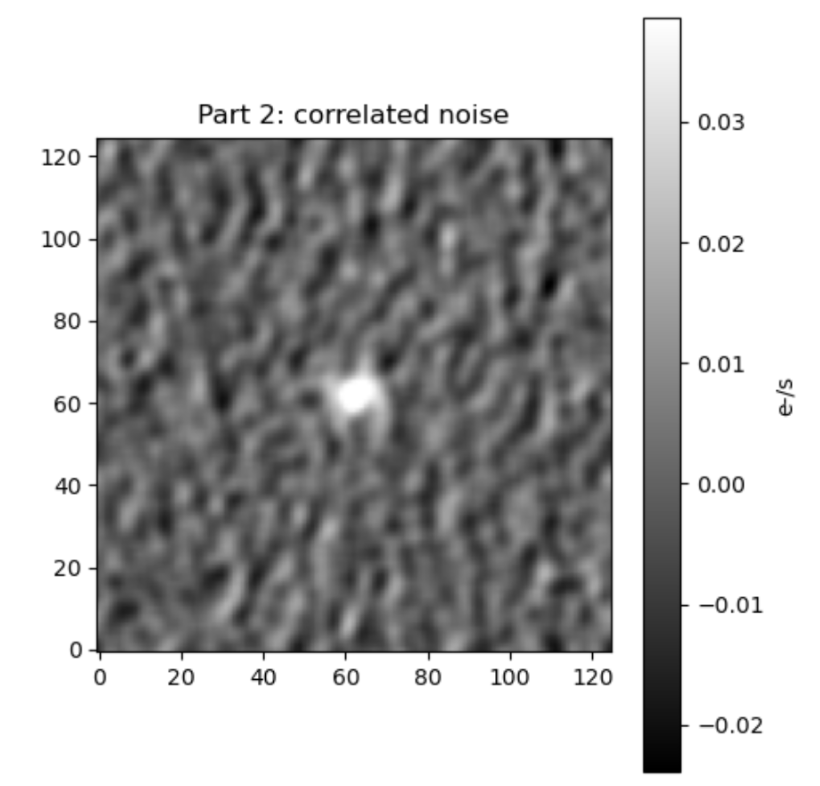
Generated with remaining noise powerspectrum
Impact on flux uncertainty
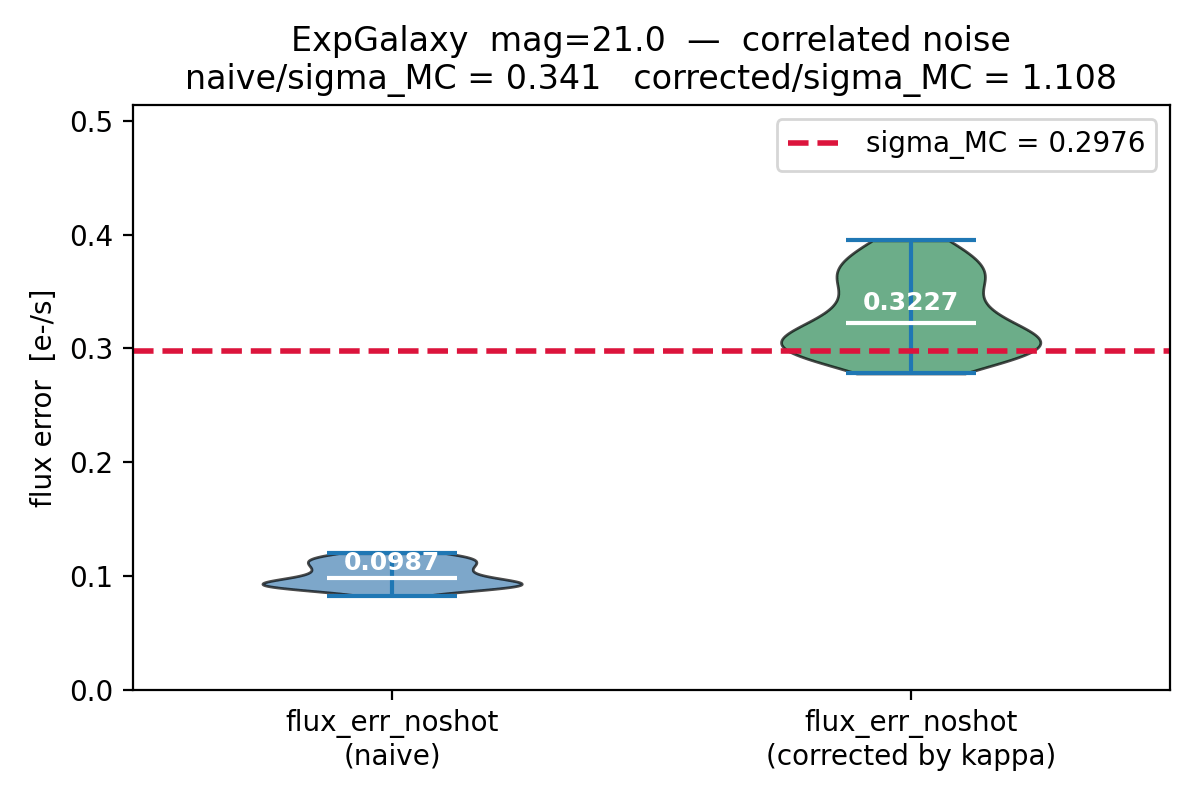
MonteCarlo Simulation
Out-of-the-box Flux Uncertainty.
Photometry measurement
- (DES) Fitvd
- (LSST) LSST-DM
- SourceXTractor++
- (COSMOS-2020) The Farmer
- Detection:
SEP - Photometry:
Tractor: Multi-object Model fitting (MOF)
- Detection:
Tae-Hyeon Shin is working on this
+ Lots of other things:
Such as Mosaic / divide skys into chunks, etc...
Weaver+23
The Farmer:
- Detection:
SEP - Photometry:
Tractor (Multi-object Model fitting)
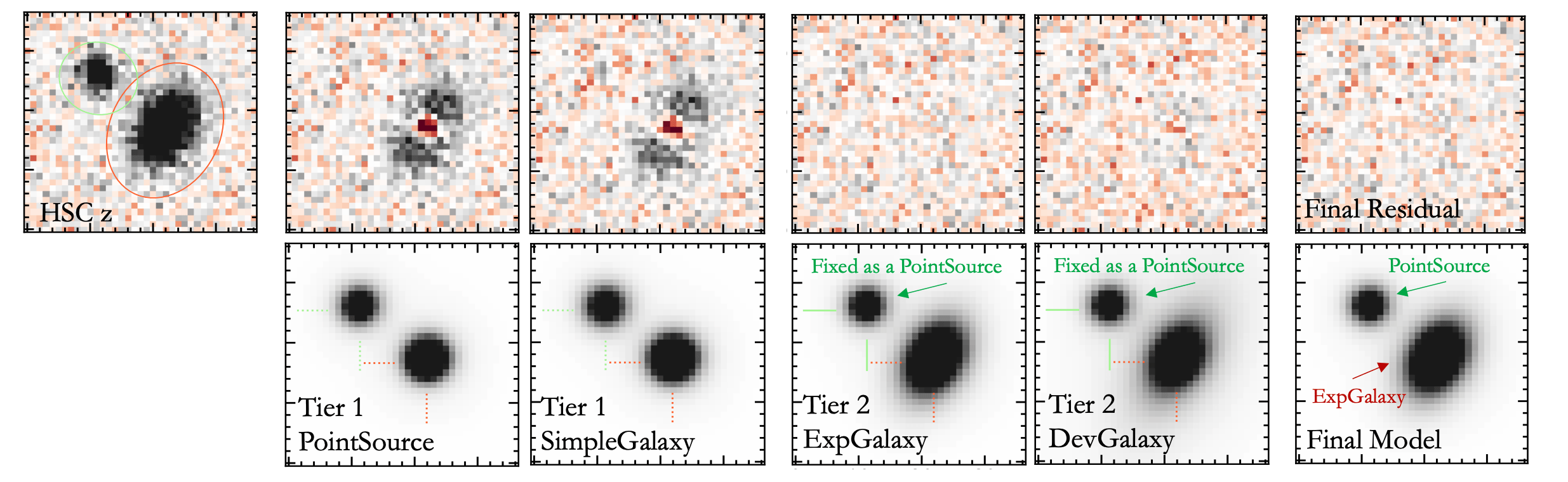
Weaver+23
+ Lots of other things:
Such as Mosaic / divide skys into chunks, etc...
The Farmer SlimFarmer
- Remove all the irrelevant features.
- The following major improvements:
- Correlated noise correction.
- Fine-tune model decision trees for the Roman image.
- Noise from astronomical objects.
+ Lots of other things:
LSST forced photometry with the same model.
Mosaic boundary and clean duplicated detections.
Astronomy 101: How to calculate flux error?
- Slimfarmer:
- Estimated from the modeled flux at each optimization step.
- The noise is scaled using residual map (empirical way to correct additional noise in DES)
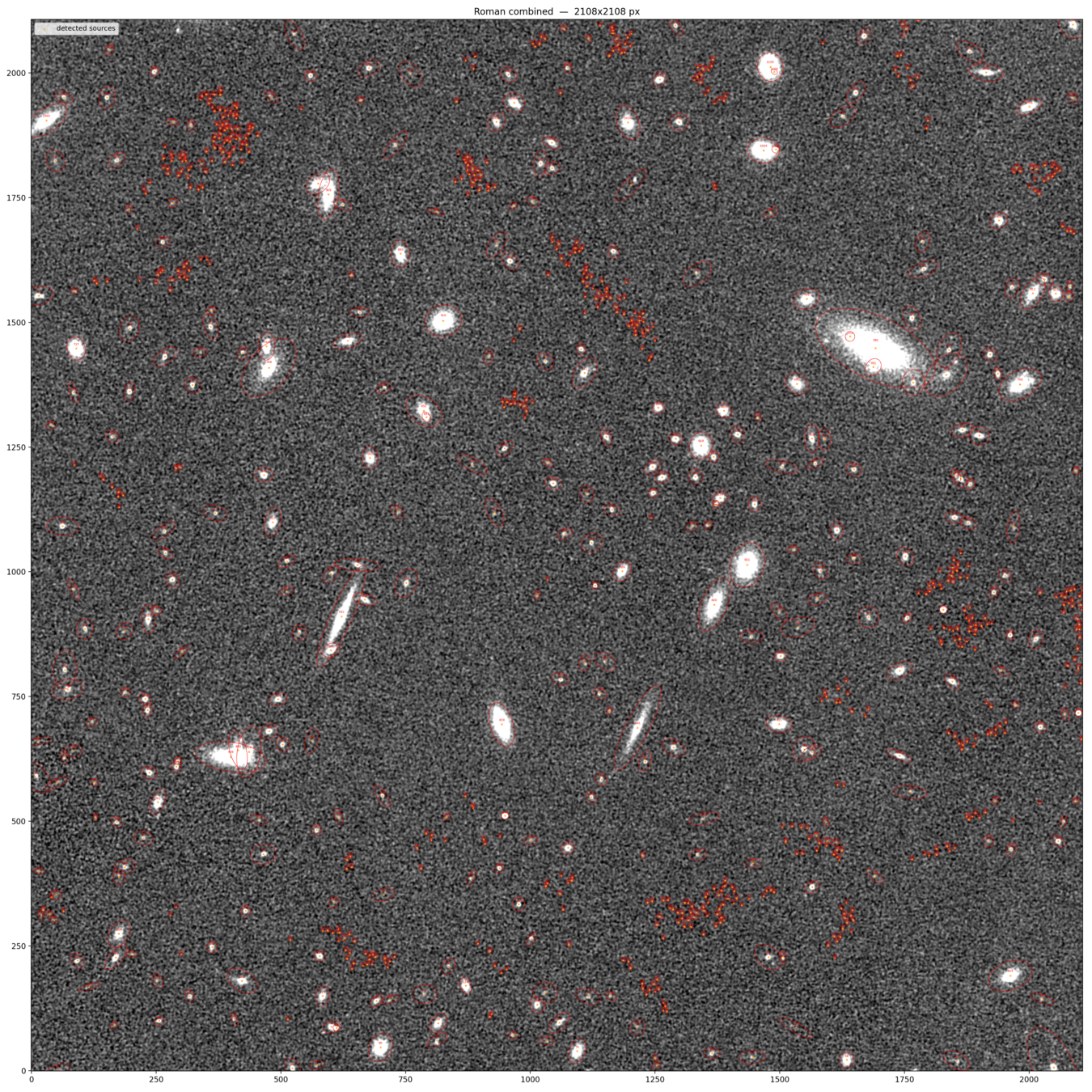
Performance validation: DC25 Sim
RA
DEC
- Input: OpenUniverse24.
- A series of imaging process pipelines from raw data to coadded images with a uniform PSF.
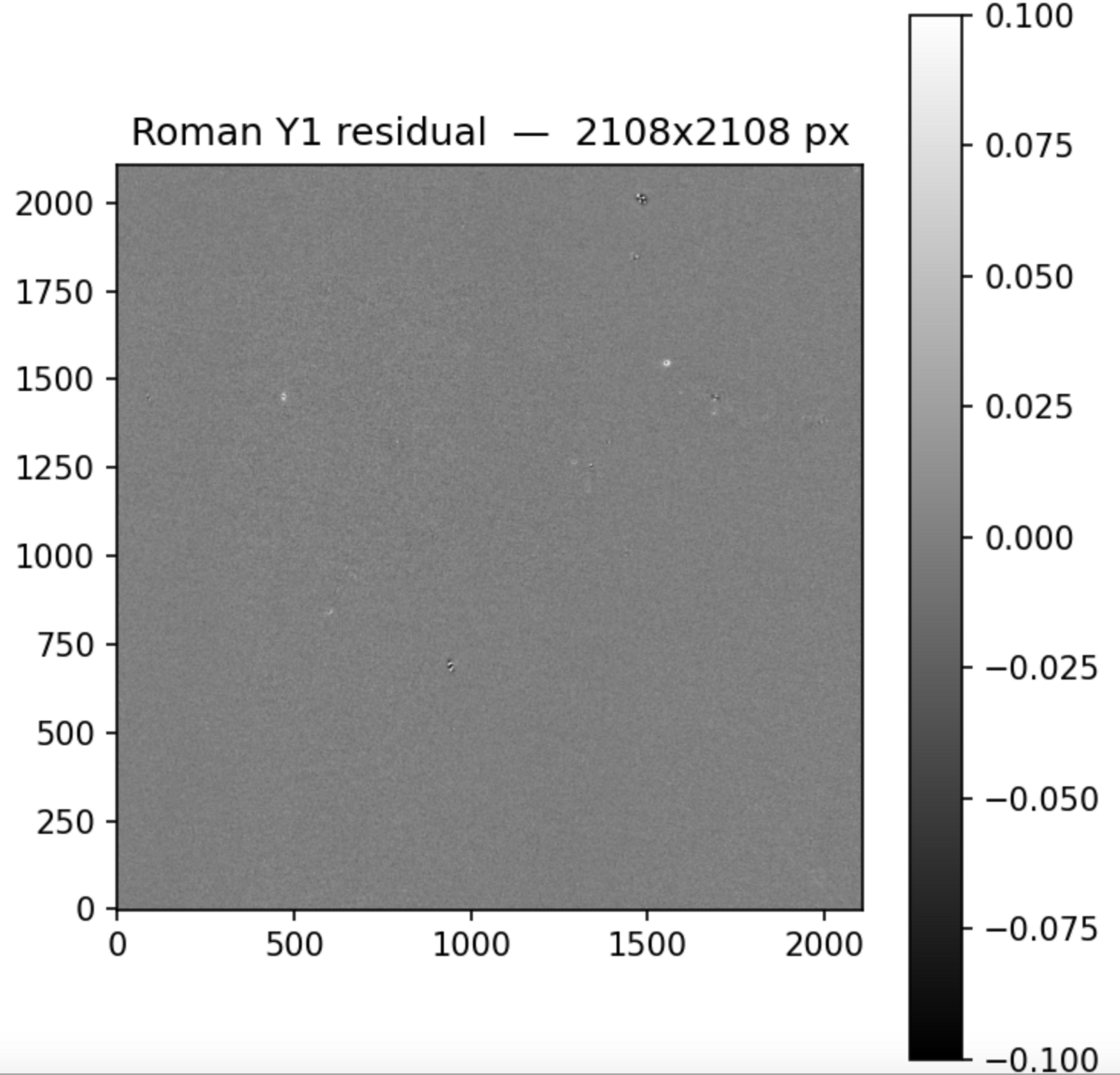
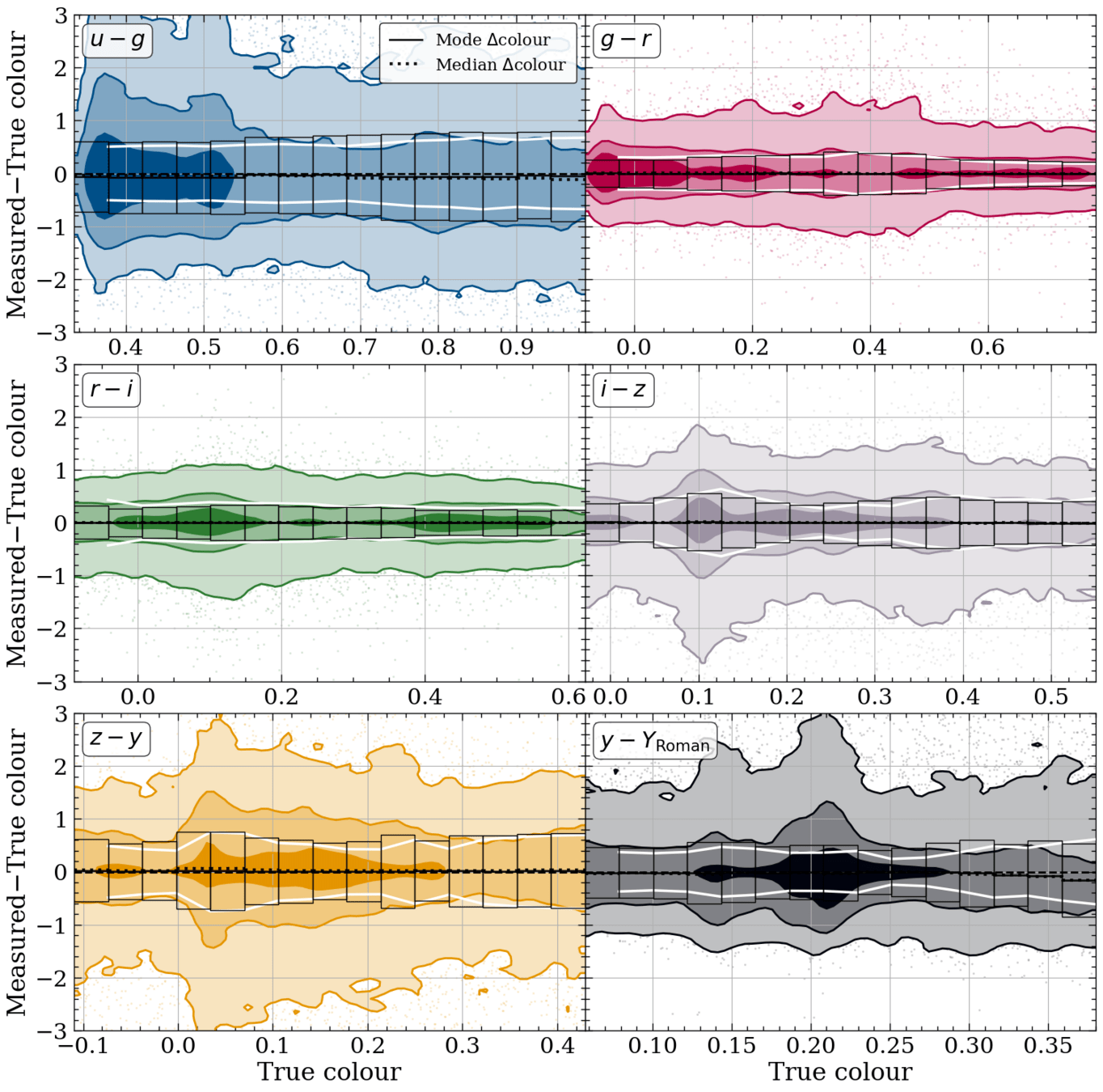
Performance: Roman
Performance: Roman
Performance: Roman Color
Out-of-the-box uncertainty
Our method
Color Error
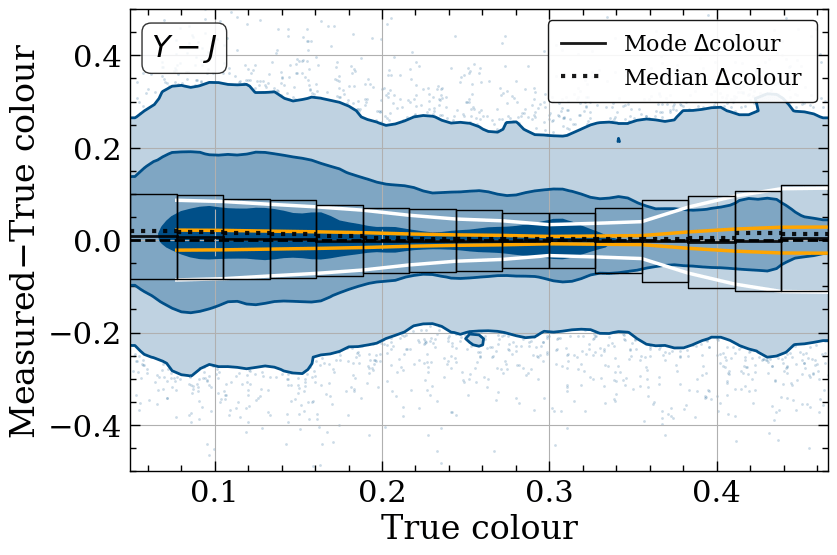
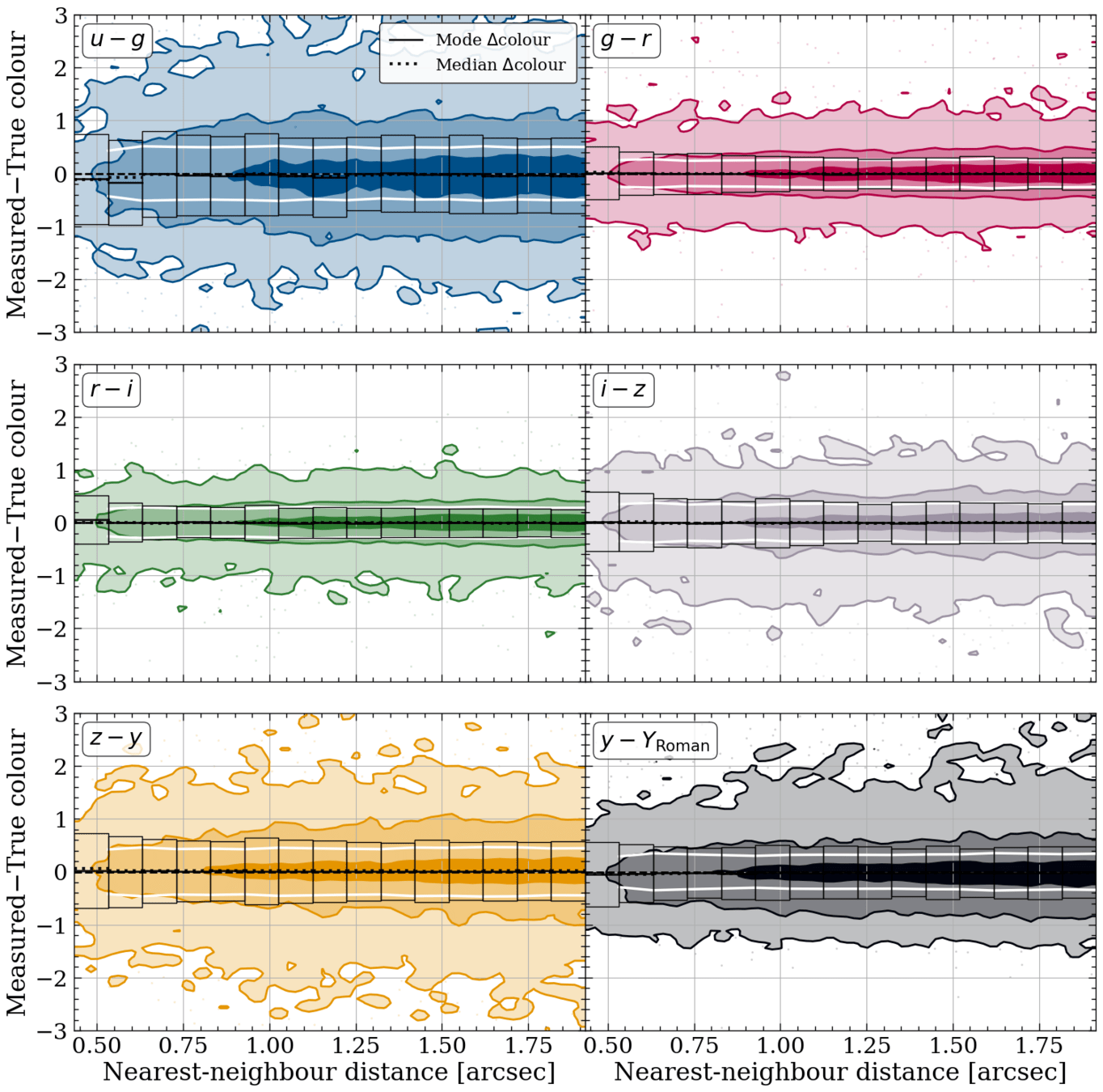
Performance: Crowdedness
More Crowded
Less Crowded
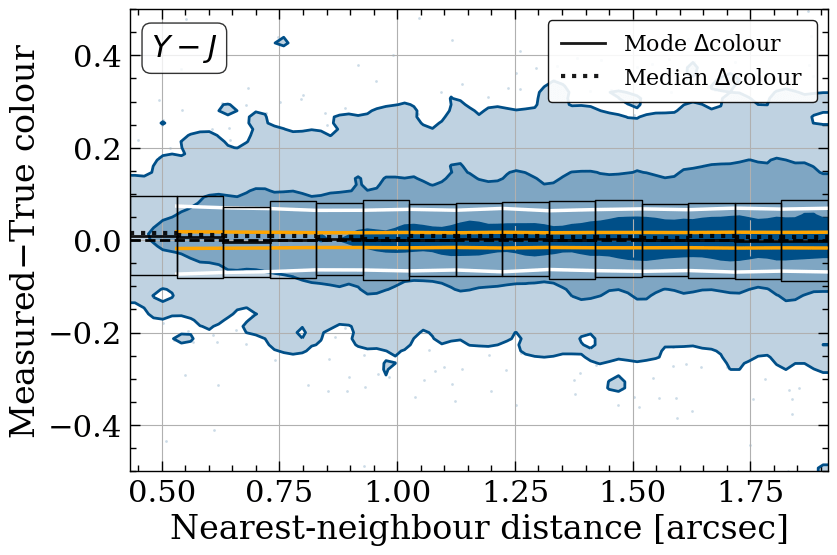
Color Error
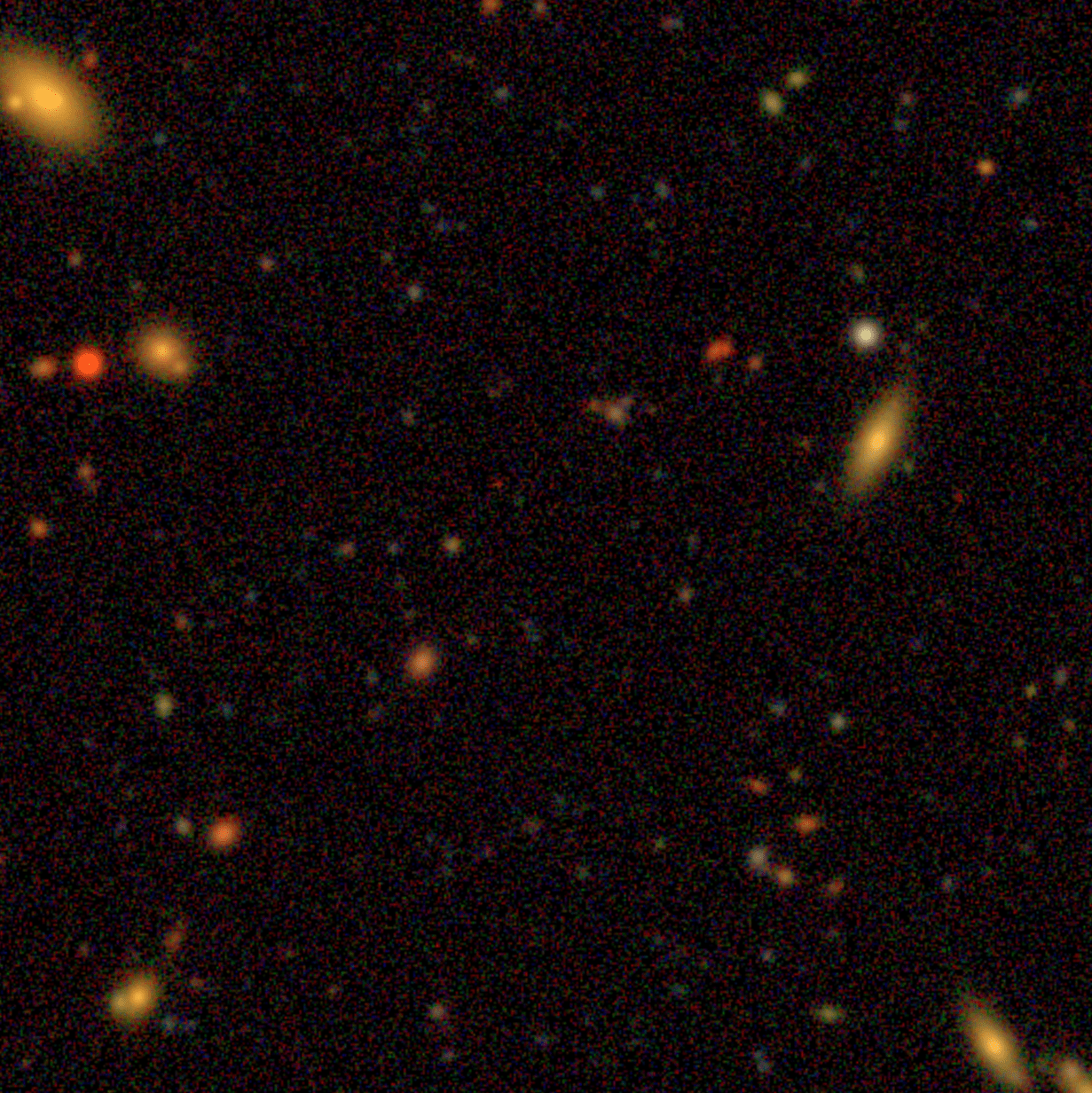
Forced photomety
- Rubin coadd: Obtain the coadd image from the Butler, which contains WCS.
- Forced photometry:
- Take groups of Roman detections (in ra, dec).
- Rotate them to Rubin coadd using WCS (done in Tractor)
- Vary their fluxes and positions with a position prior of 0.06" (0.3 of the pixel size).
- Jointly fit each group of galaxies.
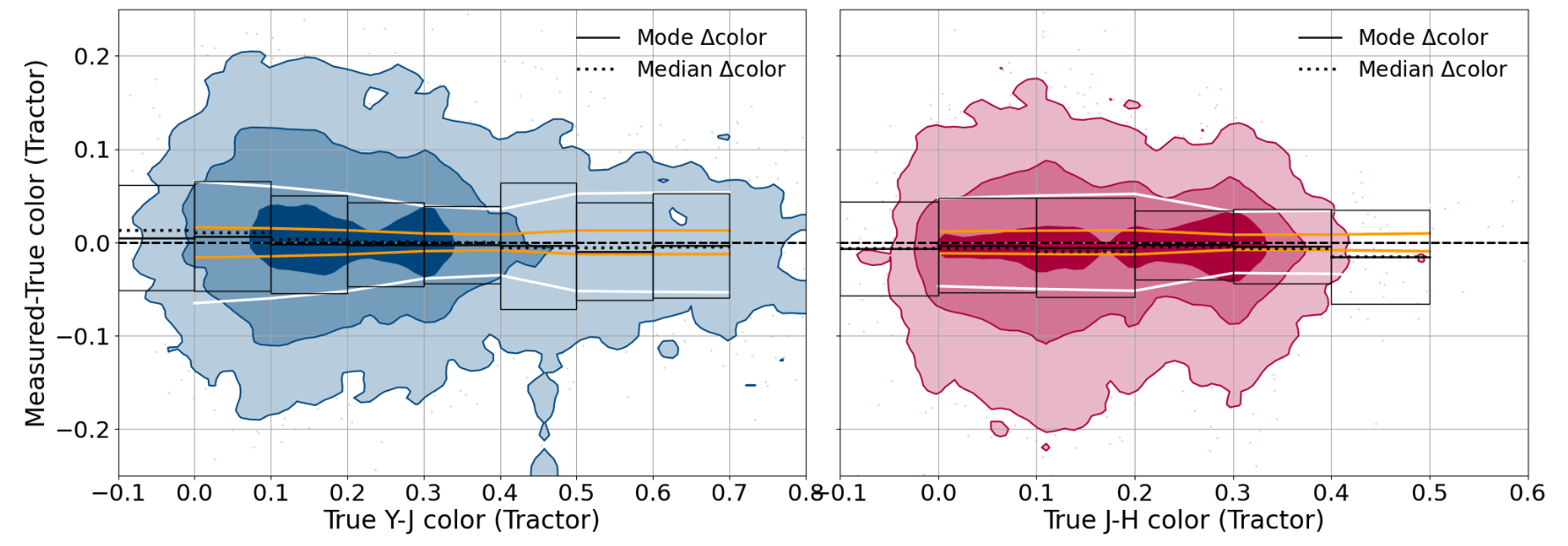
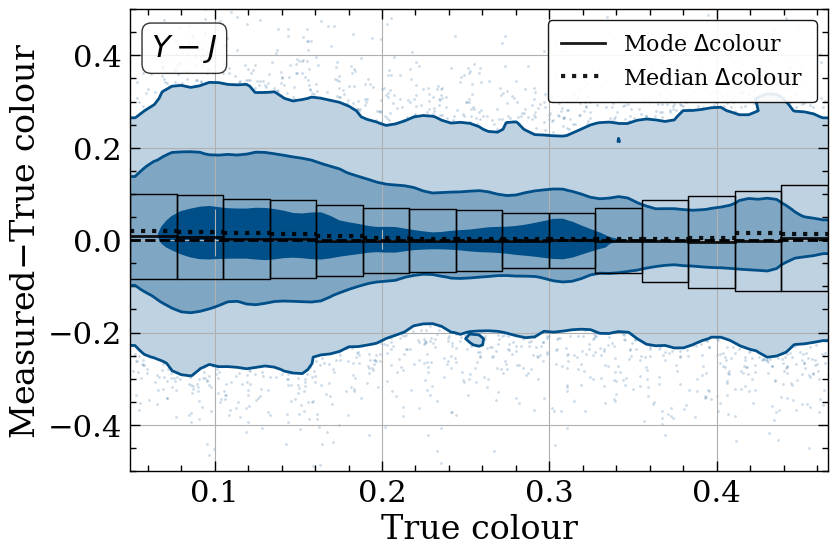
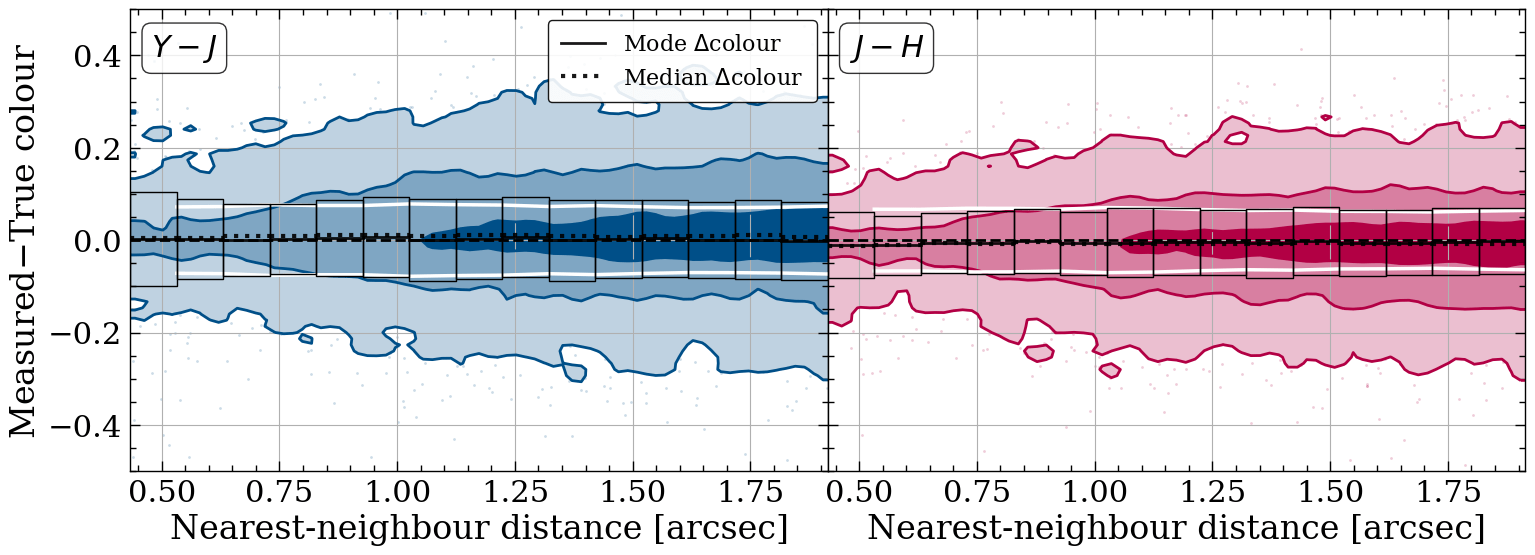
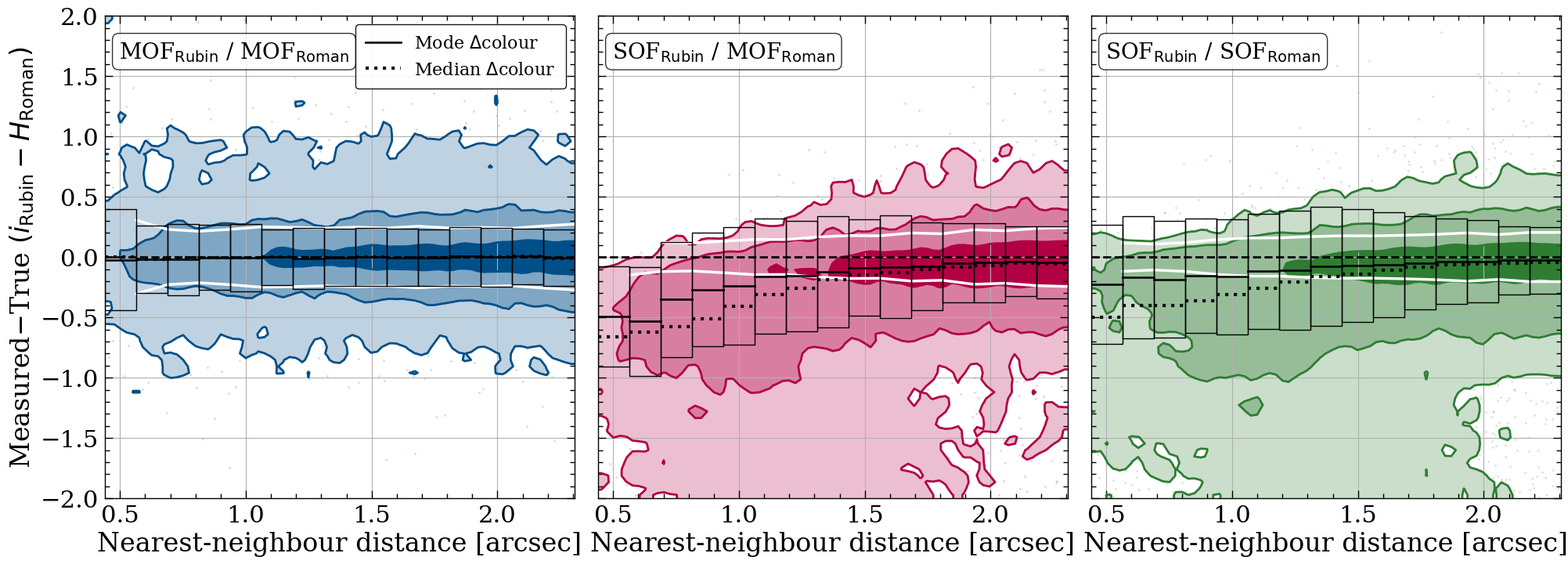
Performance: Forced Rubin Color
Color Error
Performance: Crowdedness
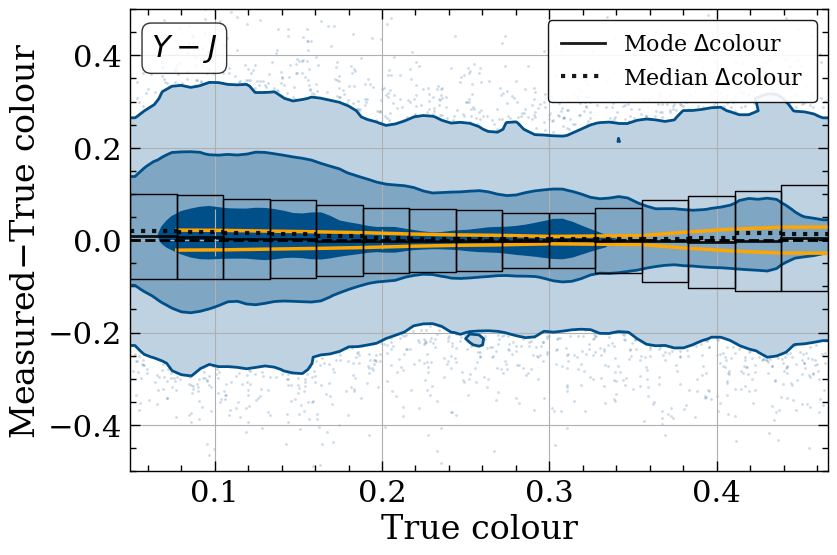
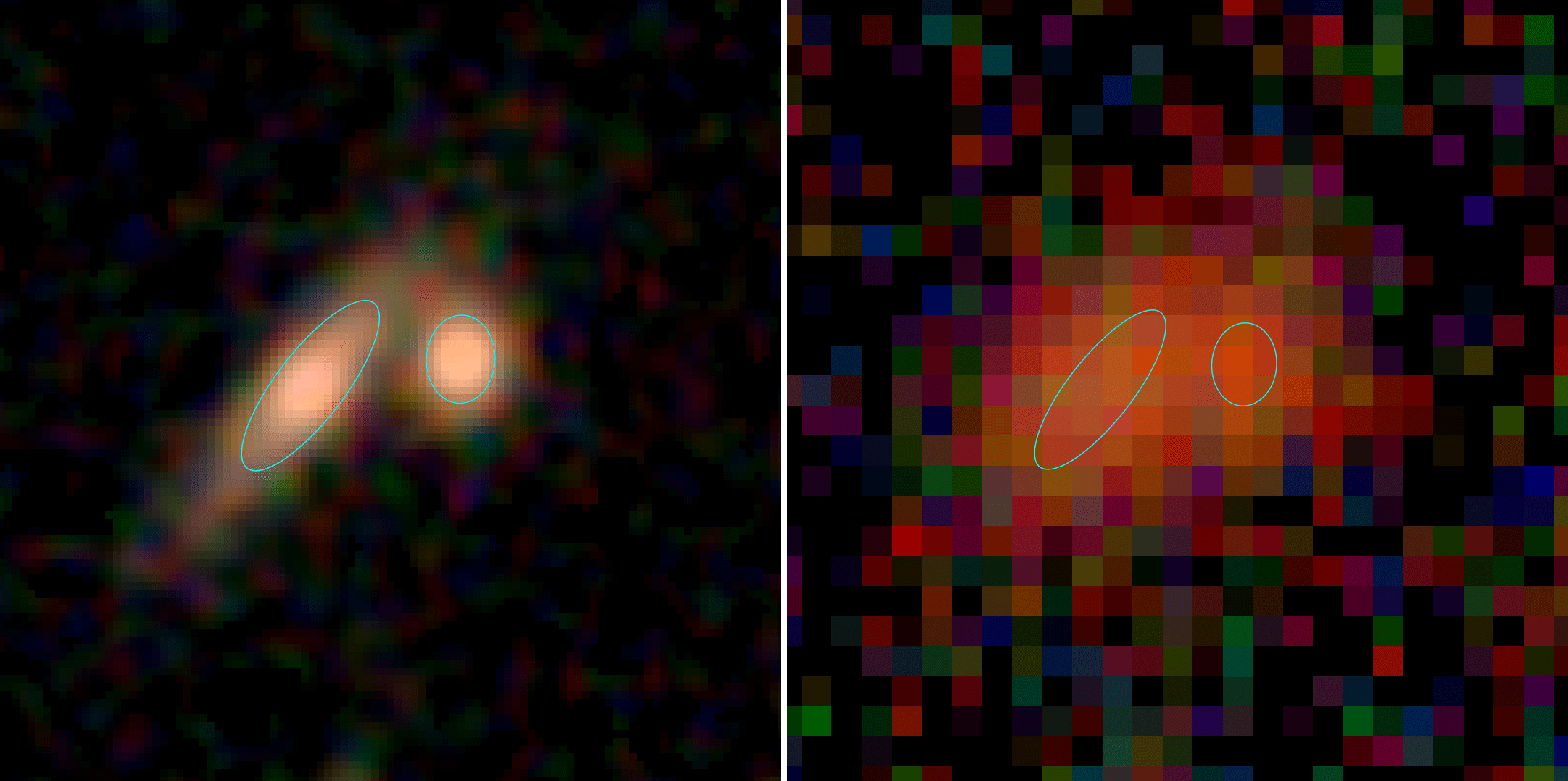
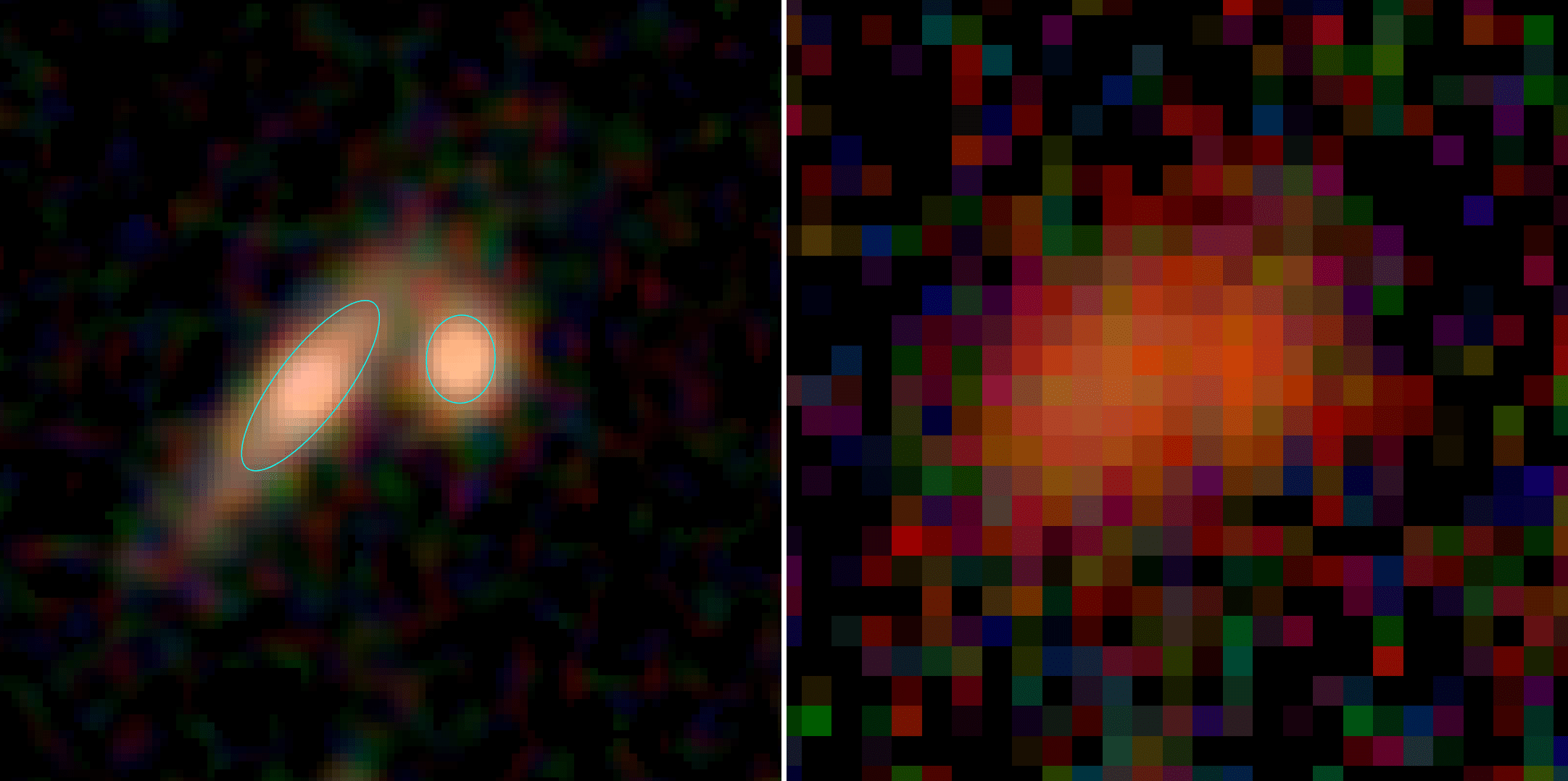
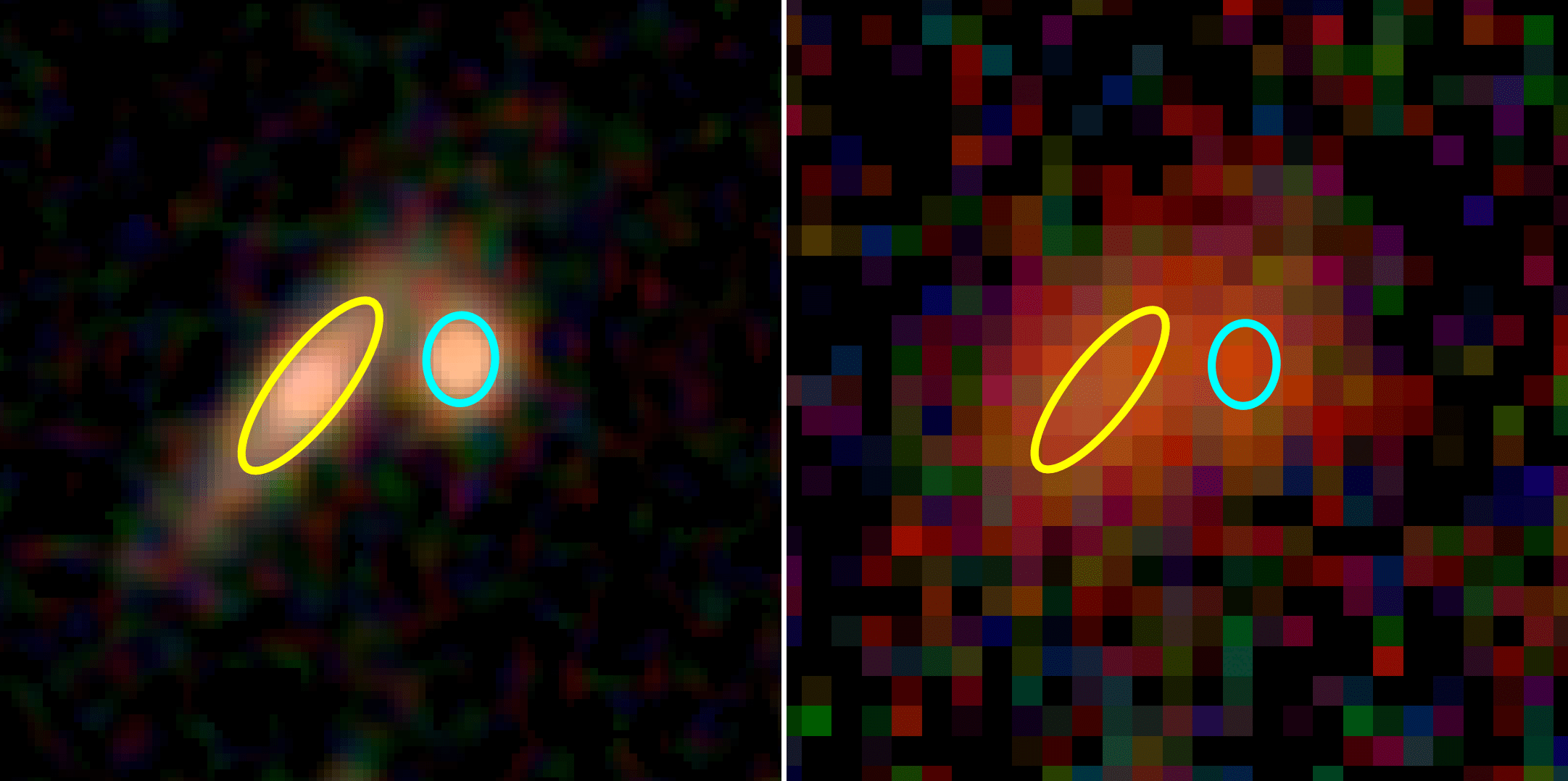
Do we need Multi-object fitting (MOF)?
Single object fitting (SOF) gives color almost as good as MOF
Do we need Multi-object fitting (MOF)?
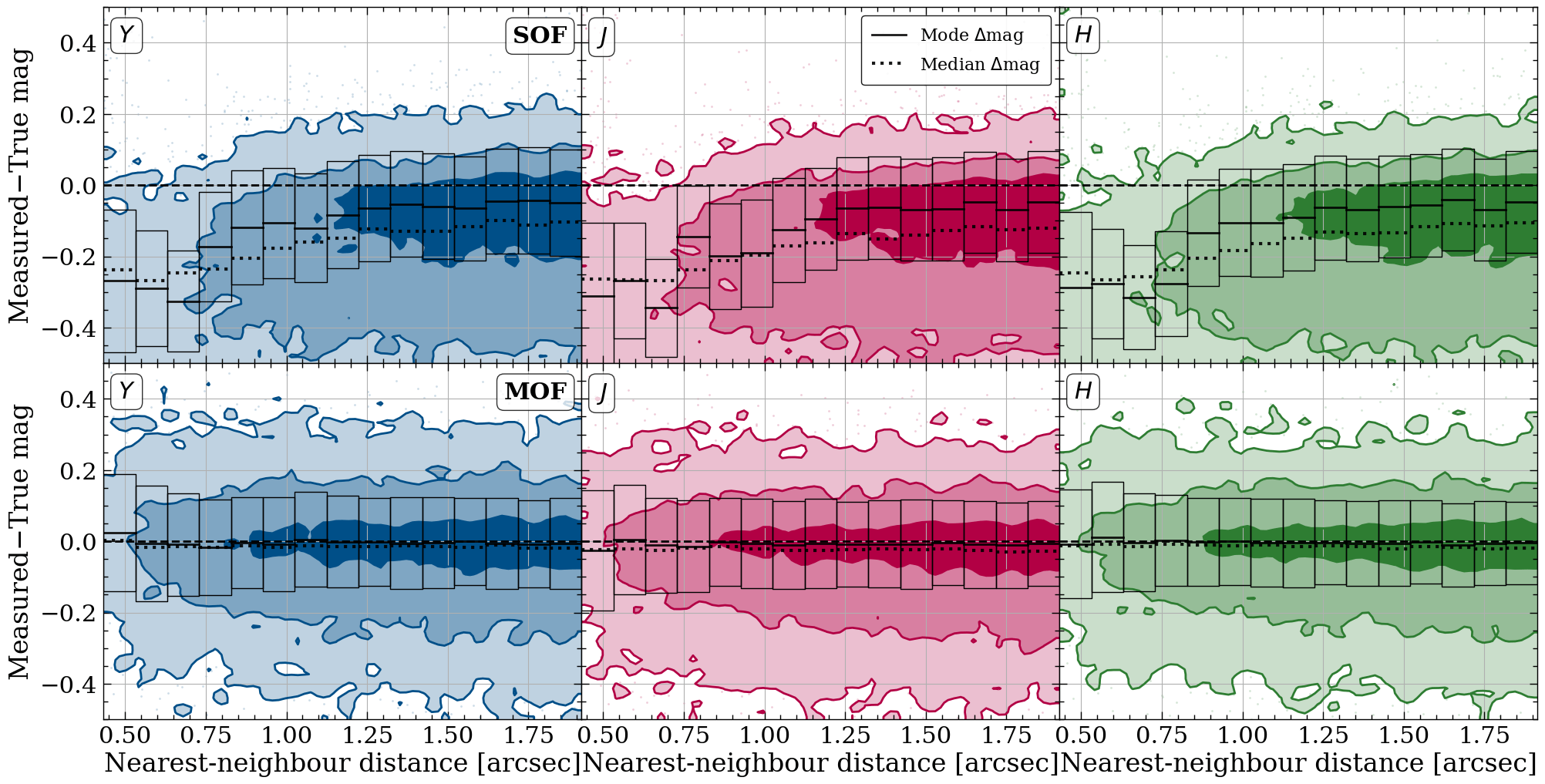
Single object fitting (SOF) gives significantly worse photometry than MOF in crowded region
Forced Rubin Color
Roman
Rubin
Roman
Rubin
Roman
Rubin
MOF
MOF
MOF
SOF
SOF
SOF
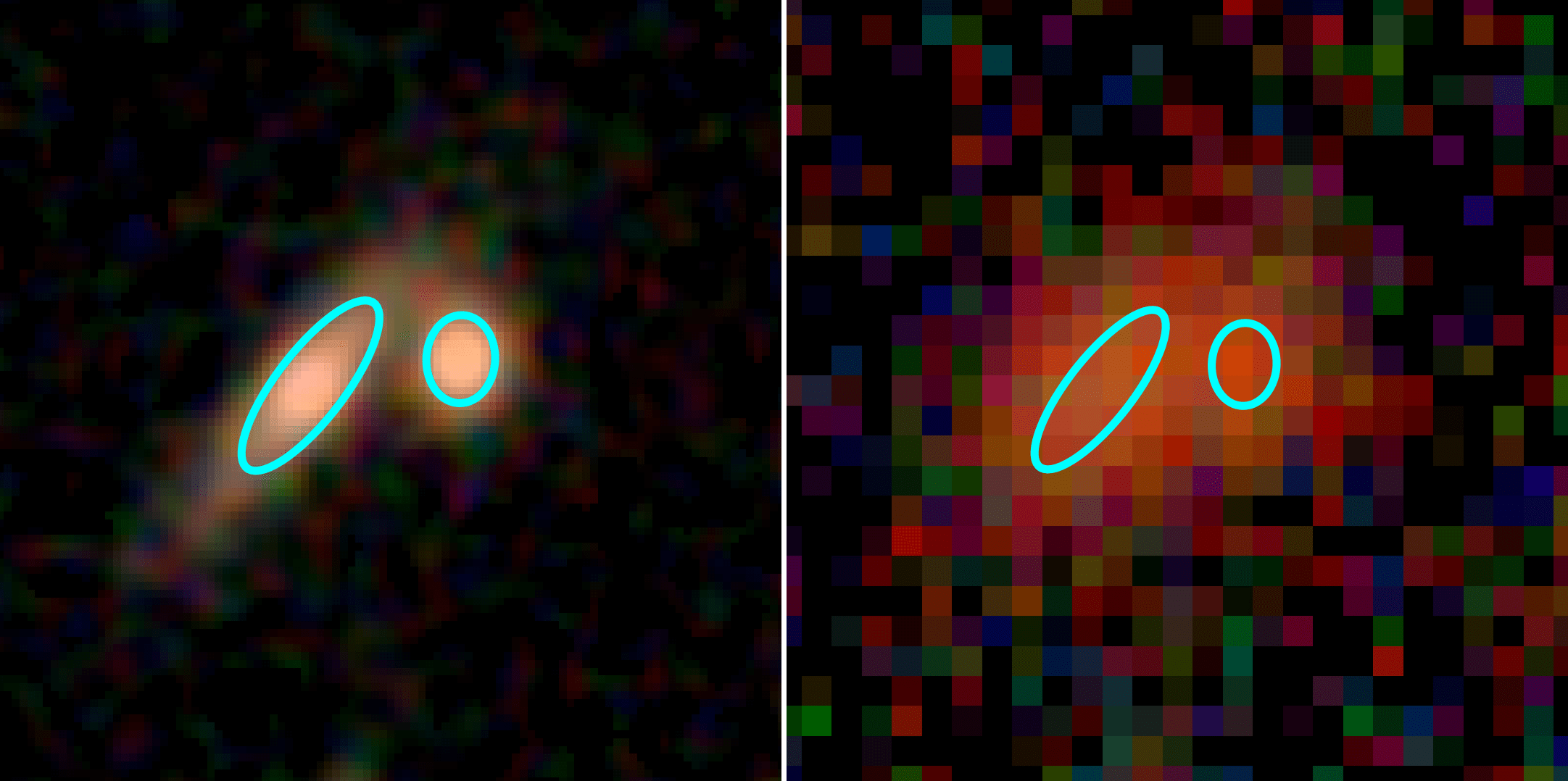
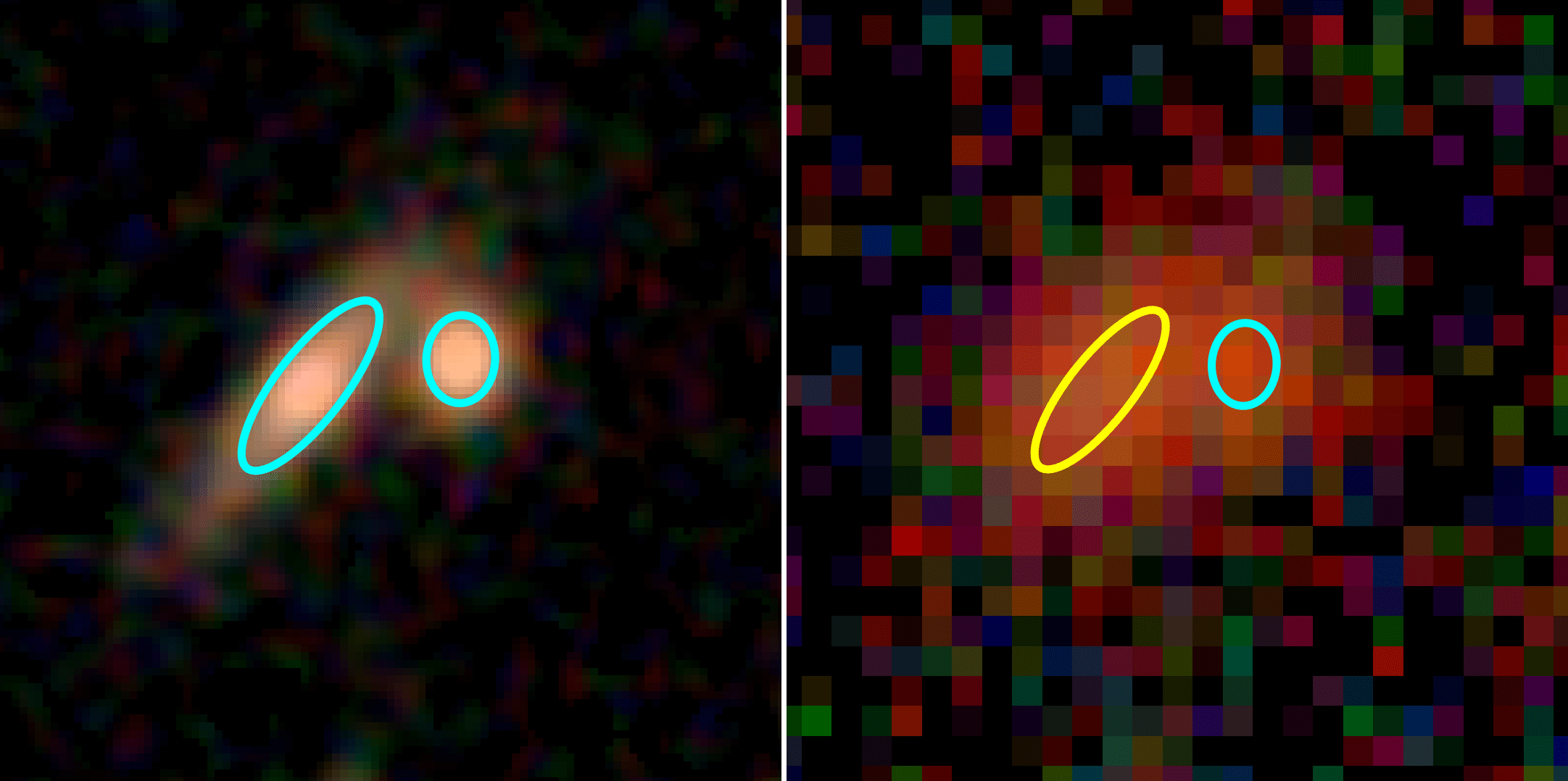
- Multi-object fitting (MOF): Fit overlapping objects jointly
- Single-object fitting (SOF): Fit each object seperately
Default
Multi-object fitting vs Single object fitting
More Crowded
Less Crowded
Multi-object fitting vs Single object fitting
More Crowded
Less Crowded
Multi-object fitting vs Single object fitting
More Crowded
Less Crowded
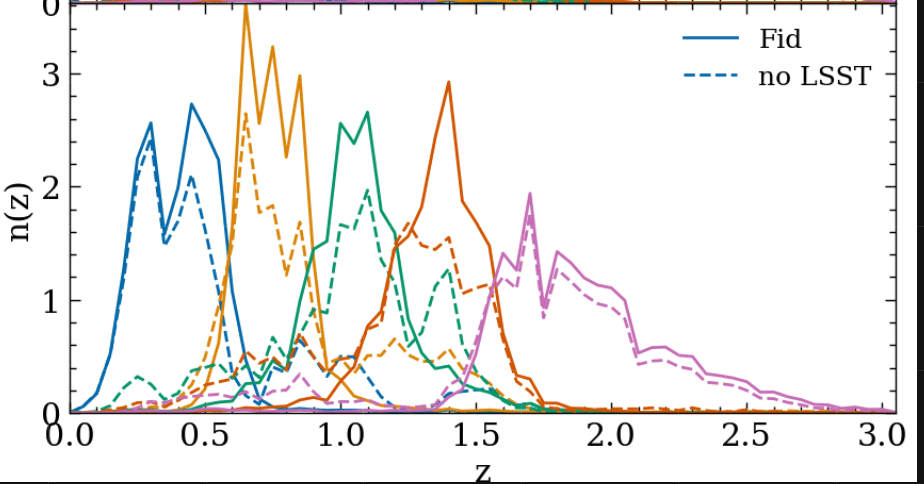
Implications: Photo-z
$ ceci ../yaml/test_all.yaml
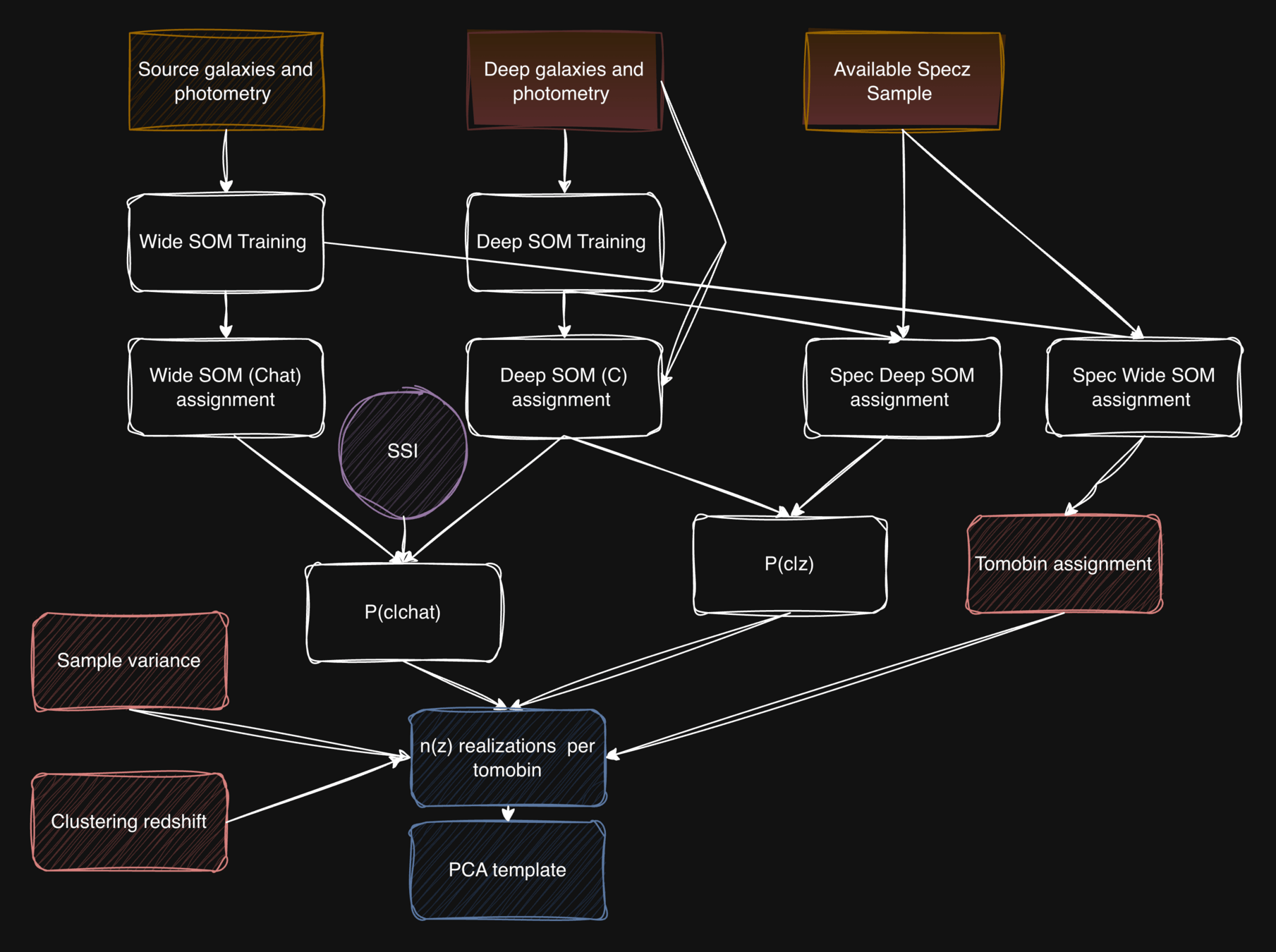
Roman-SOMPZ: Built on rail-sompz
- Uncertainty quantification.
- Much improved structure.
One single command
photometry → n(z) + uncertainty


Roman-SOMPZ Team
Implications: Photo-z
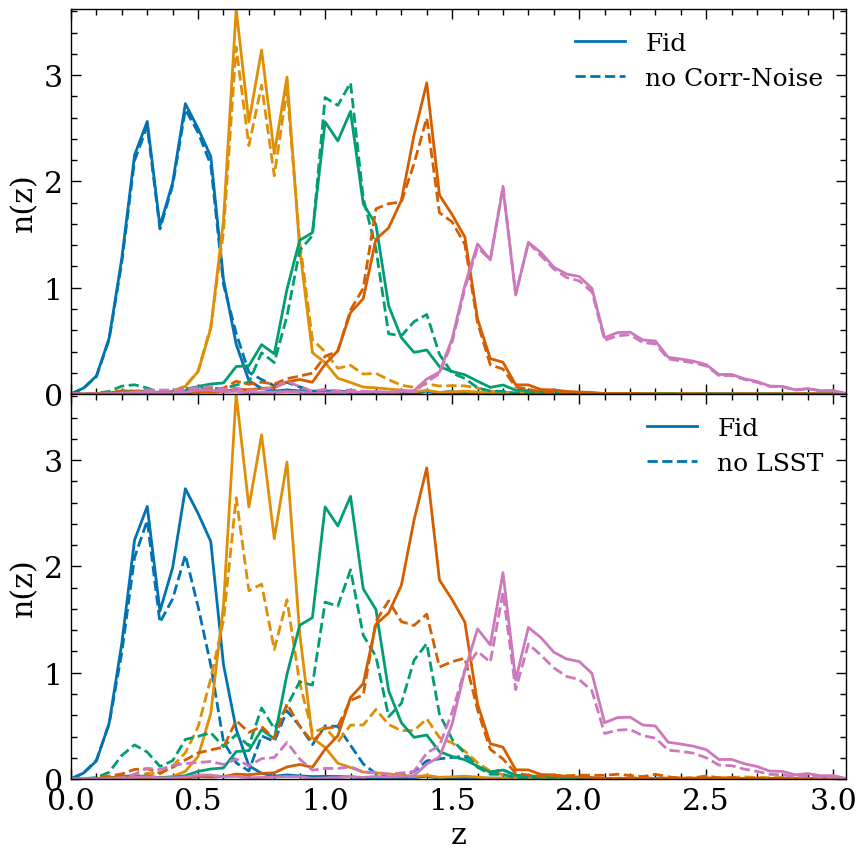
- Ignoring correlated noise has a small impact on SOMPZ.
- LSST band is important (even with caveats of simulations)
Conclusions
- Slimfarmer is a simple photometry pipeline that only does detection and photometry
- Correlated noise
- Multi-object fitting (MOF)
- Forced Rubin photometry
- Tuned to work on Roman-like images
- Using SlimFarmer, DC25 sim, and Roman-SOMPZ, we find:
- MOF is only important for absolute photometry but not colors
- Failure to account for correlated noise can underestimate flux uncertainties by several factors, but has only a small impact on SOMPZ.
- Rubin photometry will be important for Roman weak lensing photo-z.
Strong synergies between Roman and Rubin
- Multiwavelength coverage:
- Photo-z
- Photo-z
- Resolutions:
- Deblending
- Star-galaxy separation.
One step toward joint pixel processing
- Slimfarmer is built to perform Roman photometry and Rubin forced photometry.
- Correlated Noise: Failure to account for this will significantly underestimate flux uncertainties, but has minimal impact on SOMPZ.
- Multi-object fitting is needed to obtain unbiased colors.
- Rubin photometry: Essential for Roman weak lensing photo-z.