Progress Report Driverless
February
Introduction
1
Three step plan:
Introduction
2
- Middle Path Algorithm
- Cross Entropy Method + Maximizing radii
- Deterministic line calculation + Environment Mapping
Legend
3
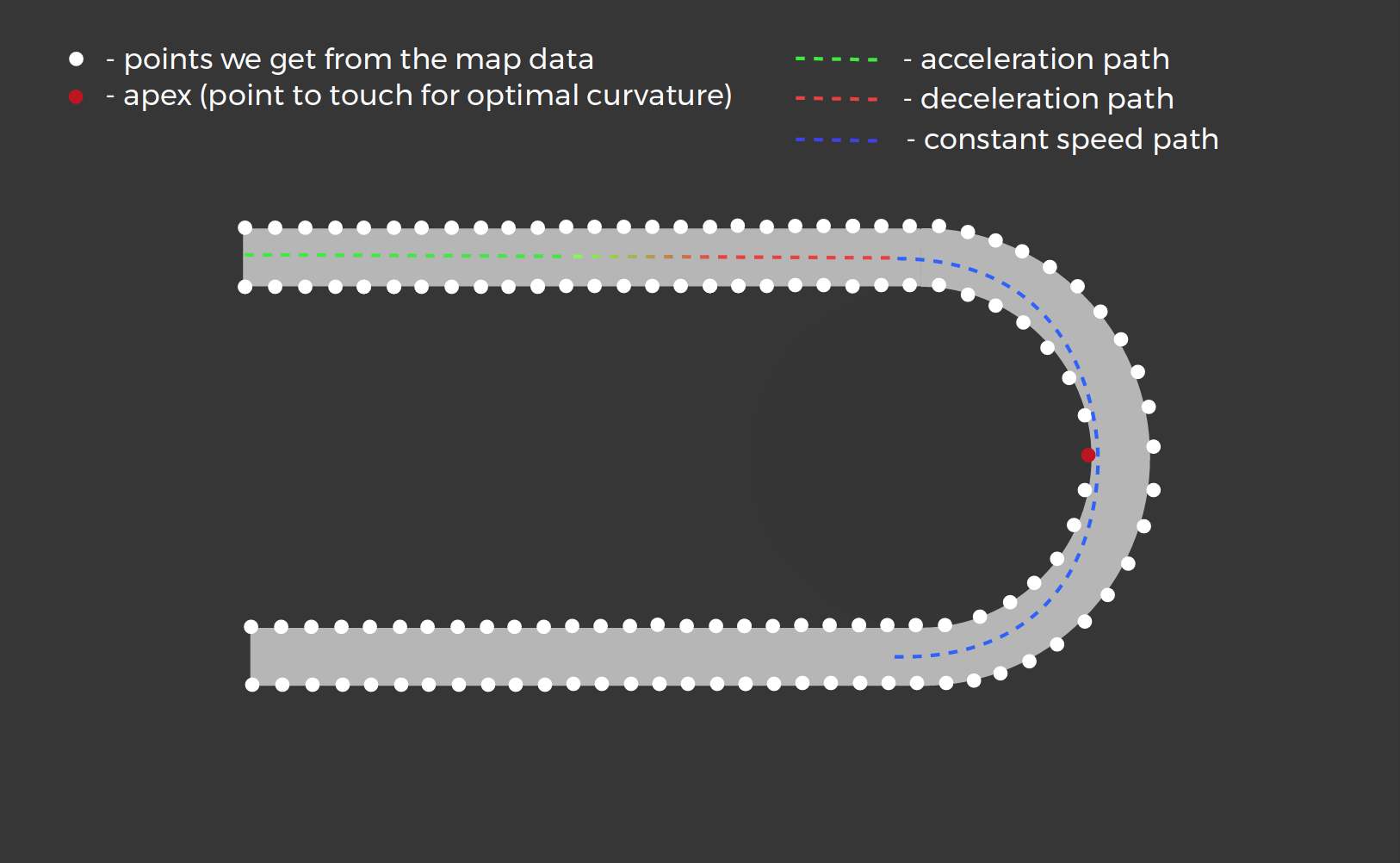
Base Case - Middle Path
4
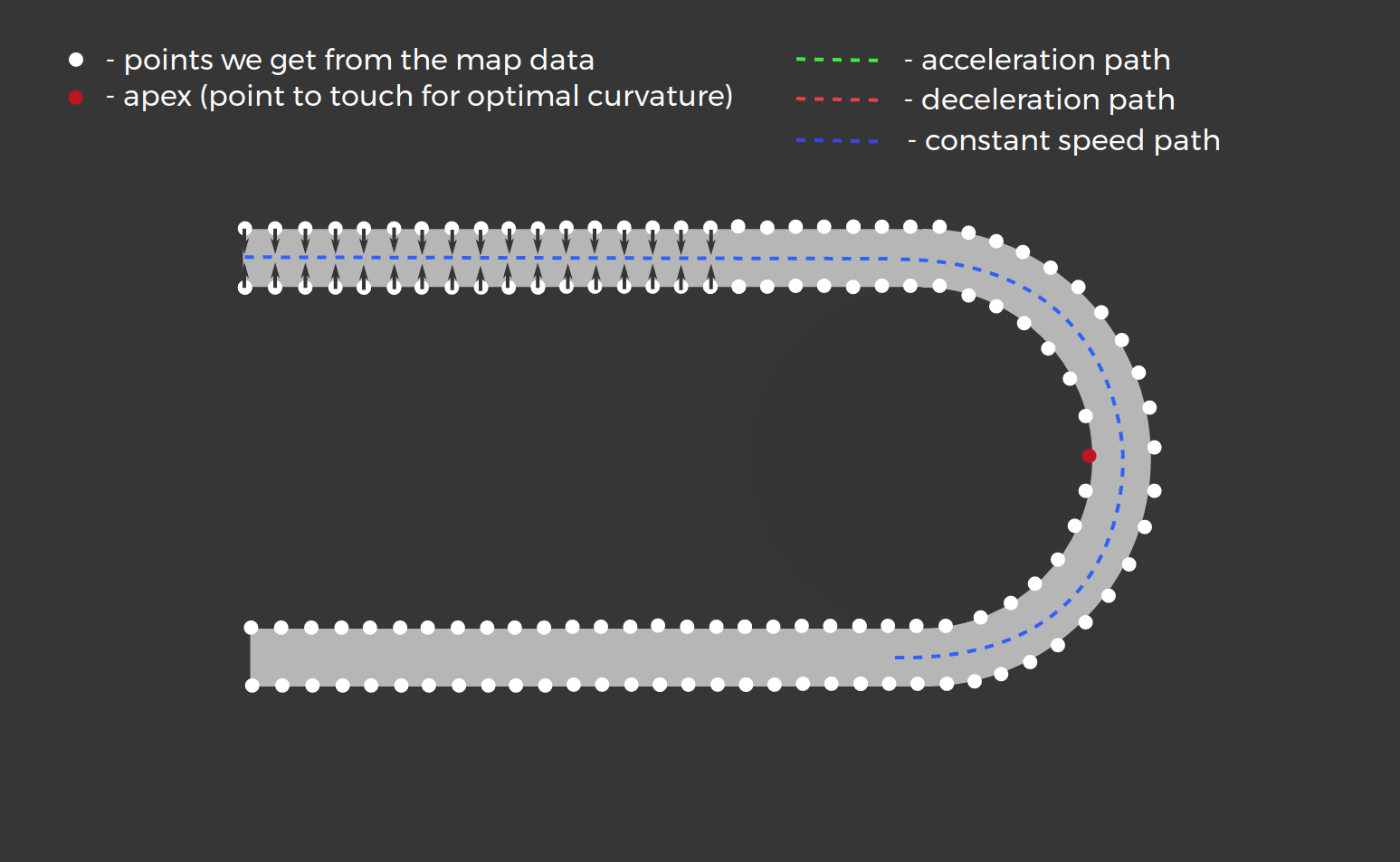
- Middle path calculation based on egde points
- maximal speed is defined by slowest curve
- base algorithm to test against
Cross Entropy & Maximizing Radii
5
Approach 1:
- To create optimal paths to they need to be a cycloid [1]
- Usage of Cross Entropy Method to place discriptive points on to the track (on-line) based on theoretical maximal speed of curves
-
Draw splines between these points and try to maximize the radii to create a path until the limitations of the track / car are approached e.g
- Border
- Turning circle of the car
- These cycloids have a maximal speed which can be derived by the centrifugal force based on friction, curvature and mass of the car [2]
- Linear interpolation of the acceleration between different splines bounded by car stats
[1] Brachistochrone Problem - https://en.wikipedia.org/wiki/Brachistochrone_curve
[2] Tires & Downforce - https://www.youtube.com/watch?v=fjrOsp6S8rA
Cross Entropy & Maximizing Radii
6
Advantages:
- maximization of radii is deterministic
- fitness is only based only on max speed of path which can be calculated without a simulation
- Adaptation of rules to maximize radii may be used for object avoidance
Disadvantages:
- Might still be to expensive to calculate
- Connecting splines is non-trivial
Deterministic Line Calculation & Cross Entropy Method
7
Approach 2:
- A path consisting of cycloids with automatic connection between weighted vectors can be calculated recursivly via the friction, speed and mass of the car [3]
- This will also give the approximated ac-/deceleraion for a given subpath
-
With this optimal path regarding the defined calculation time we can focus to learn the mapping of the simulation to the real world
- a risk factor for the stochastic environment
- online environment => possible limitations on the assumptions made in the cycloid calculations
[3] http://vamos.sourceforge.net/computer-controlled-cars/node2.html
Deterministic Line Calculation & Environment Mapping
8
Advantages:
- The calculation of the path is get better the more time it gets
- Focusing on the environment may lead to better abstraction online
- Path calculation is done without a simulation
- Reproducable path generation
Disadvantages:
- Foreign object detection might be a bigger issue
- The optimal speed will probably never be driven, need to test if the calculation accounts automatically for it, else acceleration is another issue
- From the looks of it it's way to easy and there might be hidden restrictions on the real world mapping