Neuroevolution in RoboCup2D
Bachelor Präsentation
1

Alexander Isenko
19.01.2017
Betreuer: Thomas Gabor M.Sc,
Dr. Lenz Belzner
3
Alexander Isenko
19.01.2017
Fragestellung
4
Alexander Isenko
19.01.2017
Fragestellung

5
Alexander Isenko
19.01.2017
Fragestellung
6
Alexander Isenko
19.01.2017
Fragestellung
Untersuchung von neuroevolutionären Algorithmen
in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
7
Alexander Isenko
19.01.2017
Domäne - RoboCup [1][2]



RoboCup Small Size
RoboCup@Rescue
RoboCupSoccer Standart

RoboCupSoccer Humanoid
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
8
Alexander Isenko
19.01.2017
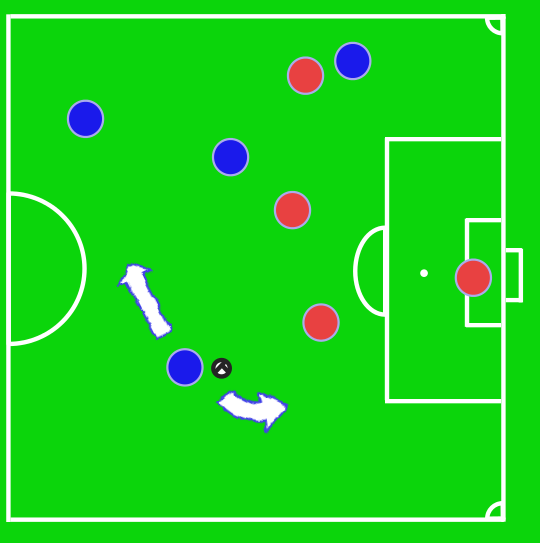
Subdomäne - Half Field Offense
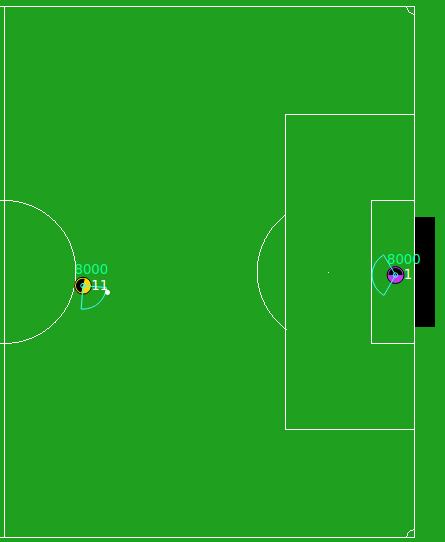
- Halbes Spielfeld
- 1 vs 1 Szenario
- Deterministischer Torwart
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
9
Alexander Isenko
19.01.2017
Half Field Offense - Zustandsraum [3]
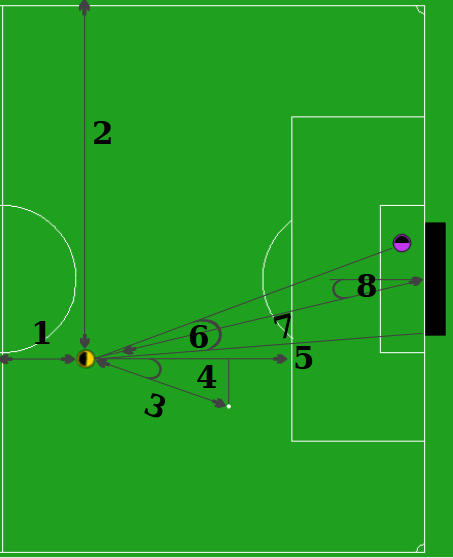
- X-Position
- Y-Position
- Distanz zum Ball
- Winkel zum Ball
- Sichtrichtung
- Winkel zw. Torwart & Pfosten
- Distanz zur Tormitte
- Winkel zur Tormitte
- Ballaktion ausführbar
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
10
Alexander Isenko
19.01.2017
Half Field Offense - Aktionsraum [3]
| Aktion | Bedeutung |
|---|---|
| Move | Bewegung in Richtung des Balls |
| Shoot | Schieße den Ball in Richtung des Tores |
| Dribble | Schieße den Ball vor dir hin und lauf hinterher |
| Intercept | Sprintet in Richtung des Balls |
| No-Op | Führe keine Aktion aus |
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
11
Alexander Isenko
19.01.2017
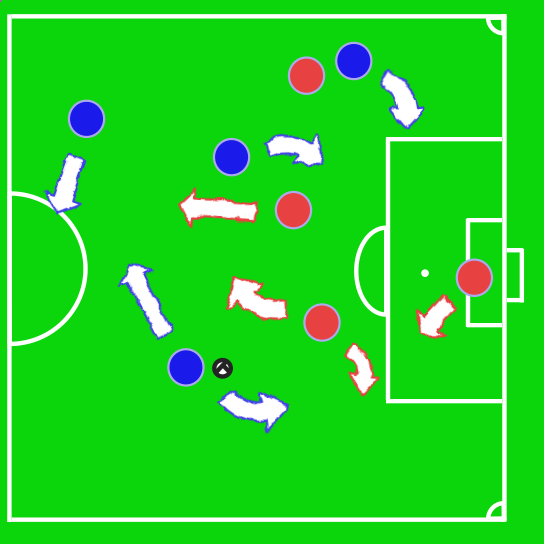
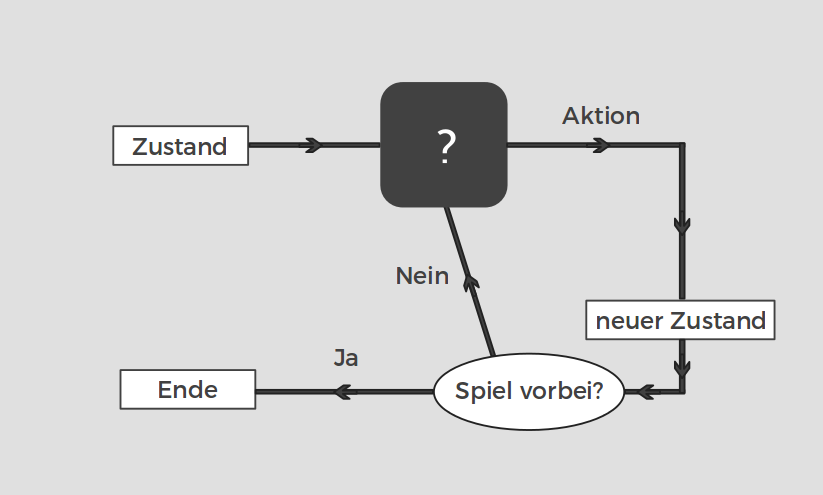
Half Field Offense - Ablauf eines Spiels
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
12
Alexander Isenko
19.01.2017
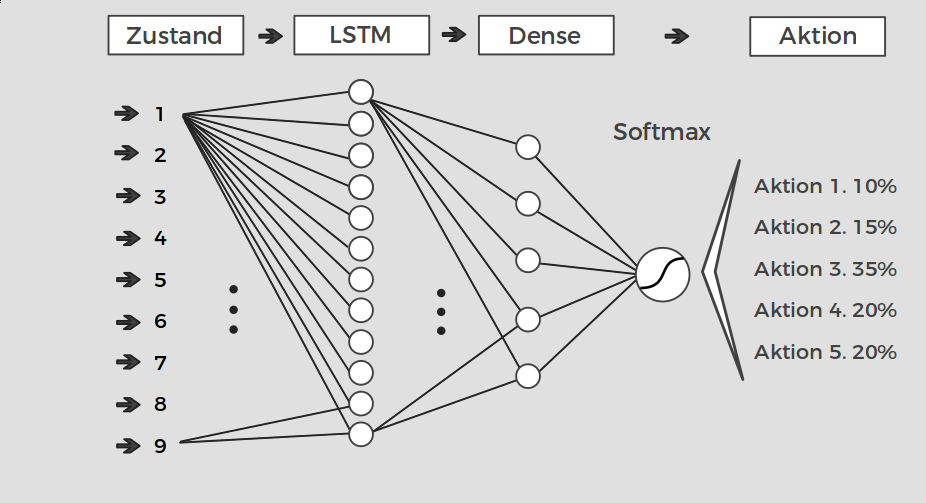
Technik - Neuronale Netze
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
13
Alexander Isenko
19.01.2017
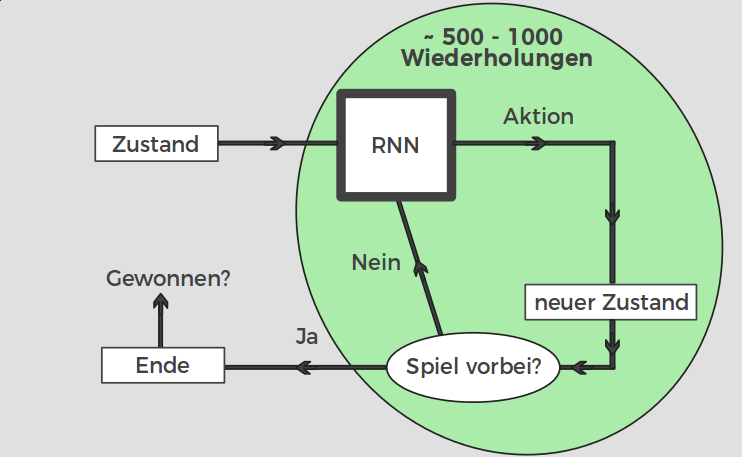
Problem - Seltene Fitnessfunktion
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
14
Alexander Isenko
19.01.2017
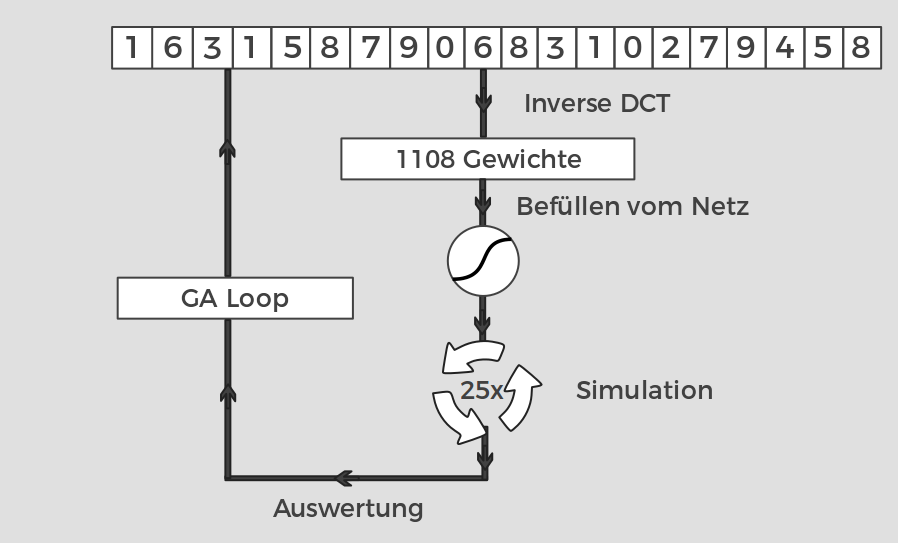
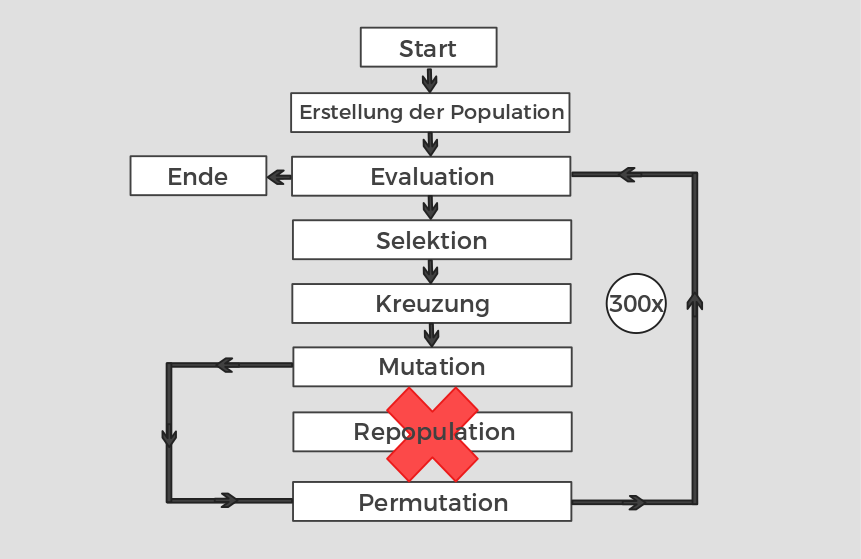
Technik - Genetischer Algorithmus
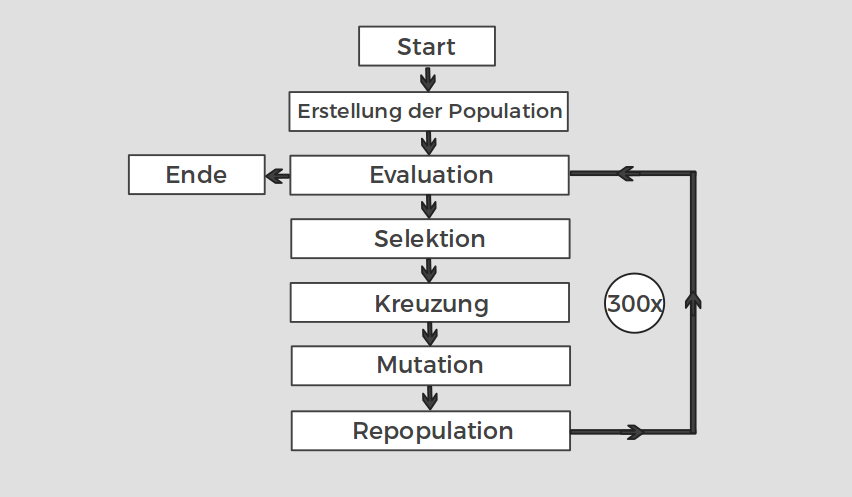
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
15
Alexander Isenko
19.01.2017
Kompression - Diskrete Kosinus Transformation
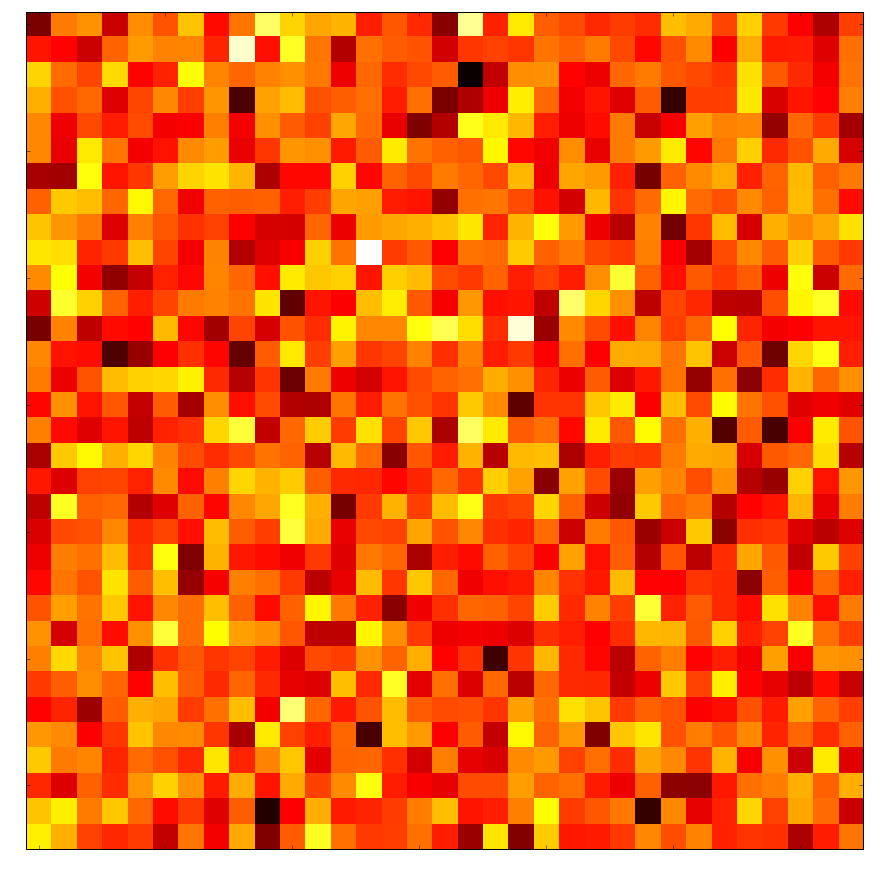
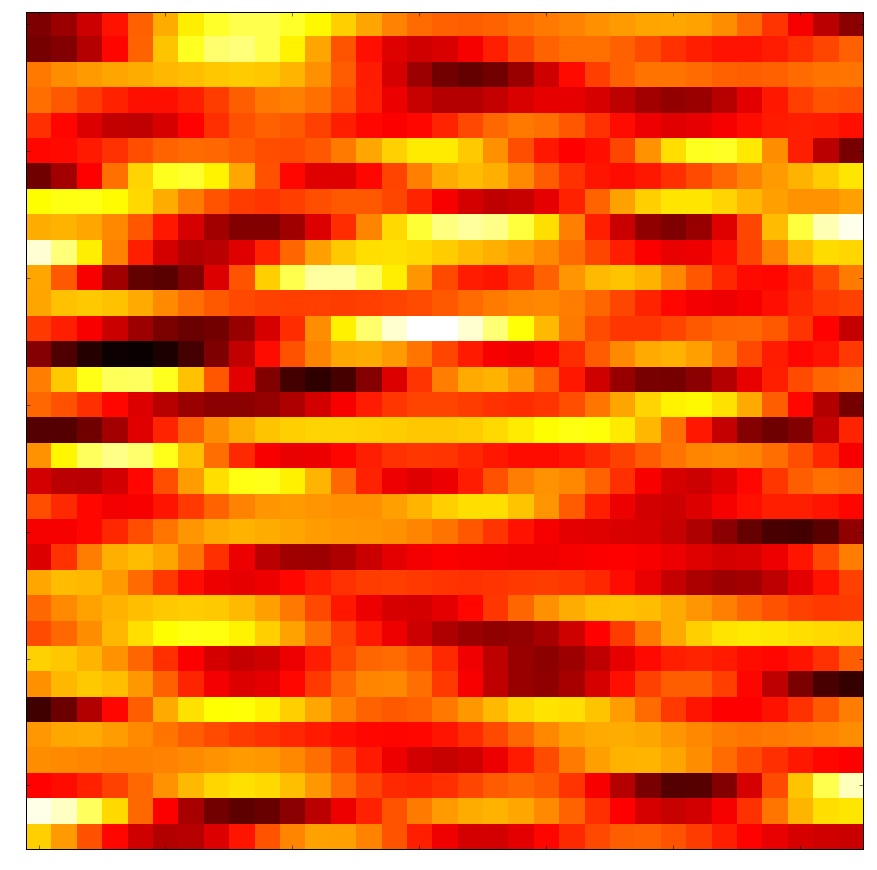

1:1
1:5
1:55
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
16
Alexander Isenko
19.01.2017
Technik #1 - Naive Neuroevolution
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
17
Alexander Isenko
19.01.2017
Technik #2 - Cross Entropy Method [5]
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
18
Alexander Isenko
19.01.2017
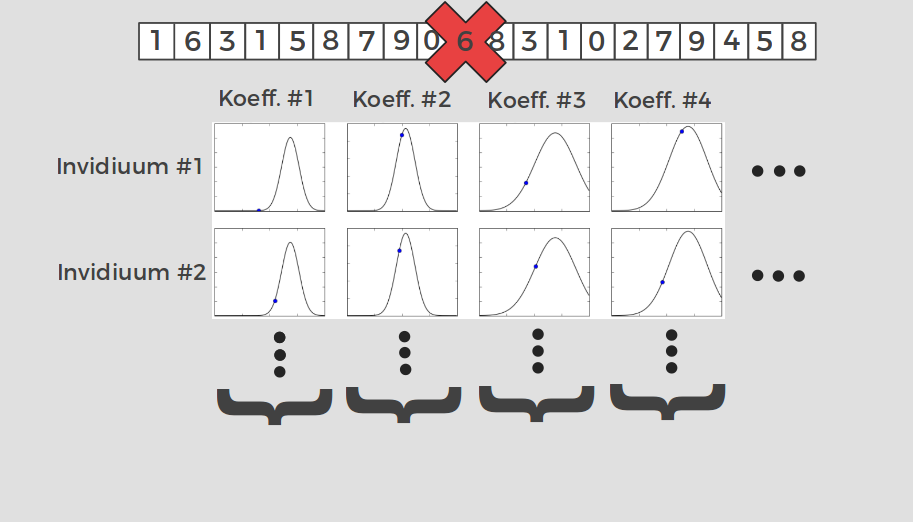
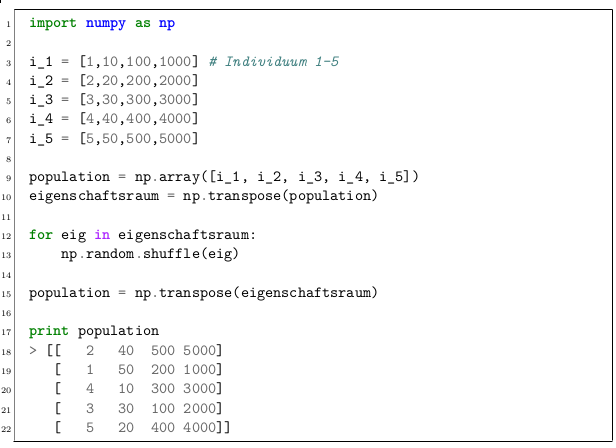
Technik #3 - CoSyNE [4]
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
19
Alexander Isenko
19.01.2017
Resultate - Cross Entropy Method
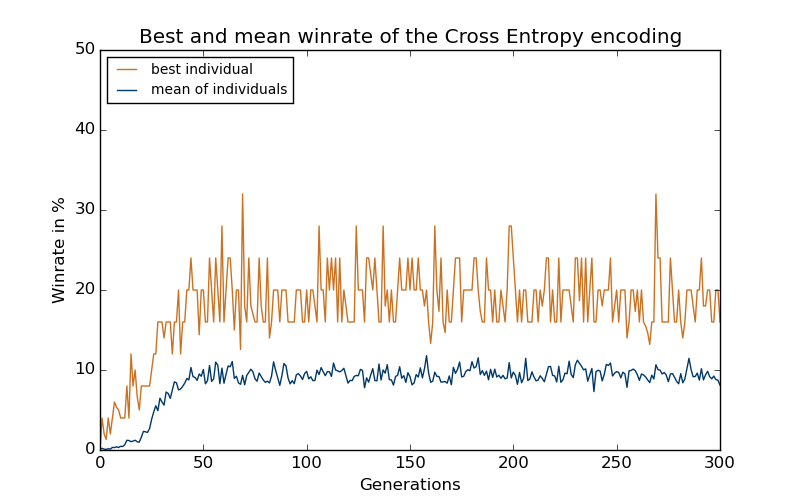
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
20
Alexander Isenko
19.01.2017
Resultate - Naive Neuroevulution
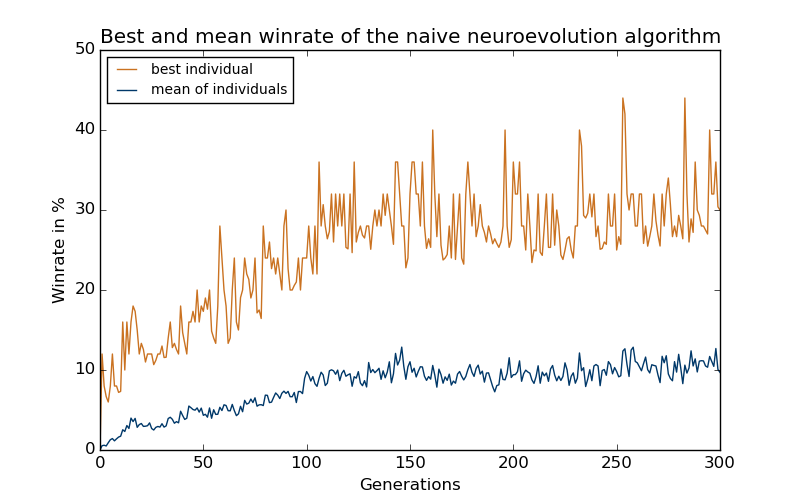
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
21
Alexander Isenko
19.01.2017
Resultate - CoSyNE
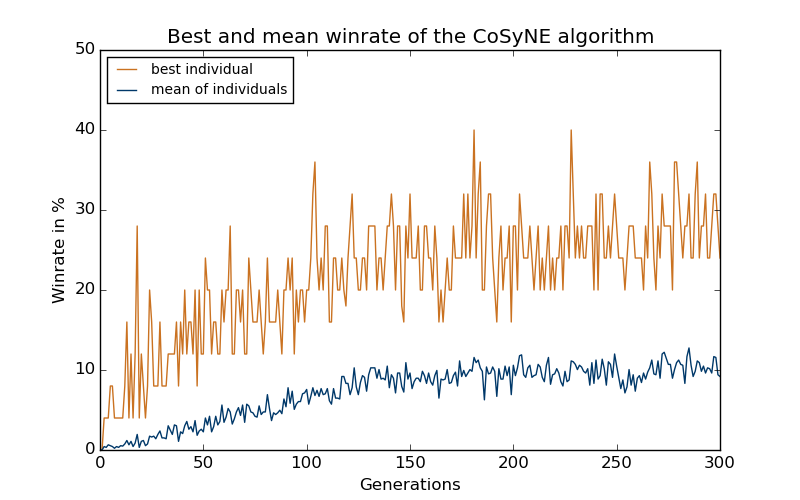
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
22
Alexander Isenko
19.01.2017
Resultate - Zusammenfassung
| Algorithmus | E(Trainierte Fit.) | E(Getestete Fit.) | E(Fehler) |
|---|---|---|---|
| Cross Entropy | 29.60% | 6.56% | 77.87% |
| CoSyNE | 37.60% | 12.45% | 66.98% |
| Naive Neuroevo. | 42.00% | 20.13% | 51.93% |
Untersuchung von neuroevolutionären Algorithmen in einer Domäne mit seltener Fitnessfunktion ohne Gradienten
23
Alexander Isenko
19.01.2017
Resultate
Video
24
Alexander Isenko
19.01.2017
Ausblick
- Die Implementierung und Algorithmus sind erweiterbar auf 4 vs 4 modelliert
- OpenAI Gym Aufgabe wurde freigeschaltet ohne bisherige Submissions
- Tests gegen Policy Gradient Methoden
- CoSyNE + DCT haben bei den Papern viel besser abgeschnitten [4], verschiedene Parametrisierung sollten ausprobiert werden
25
Alexander Isenko
19.01.2017
Referenzen
[1] http://www.robocup.org/leagues
[2] http://www.robocup.org/a_brief_history_of_robocup
[3] https://github.com/LARG/HFO/blob/master/doc/manual.pdf
[4] F. Gomez, J. Schmidhuber, and R. Miikkulainen, “Efficient non-linear control
through neuroevolution,” in Proceedings of the European Conference on Machine
Learning, (Berlin), pp. 654–662, Springer, 2006
[5] https://gym.openai.com/docs/rl
26
Alexander Isenko
19.01.2017
Half Field Offense - Zustandsraum
Winkelkodierung
Lagekodierung
Boole'sche Kodierung
27
Alexander Isenko
19.01.2017
GA - Kodierungsdetails
| Generationen | 300 |
|---|---|
| Populationsgröße | 50 |
| Teamepisoden | 25 |
| Episodenzeit | 500s |
| Ball nicht berührt | 50s |
| Selektion | 25% |
| Mutation | 10% |
28
Alexander Isenko
19.01.2017
CoSyNE - Beispiel
29
Alexander Isenko
19.01.2017