Vision par ordinateur
&
Apprentissage profond
Contenu essentiellement tiré de l'excellent cours du MIT
MIT 6.S191: Introduction to Deep Learning
© Alexander Amini and Ava Soleimany
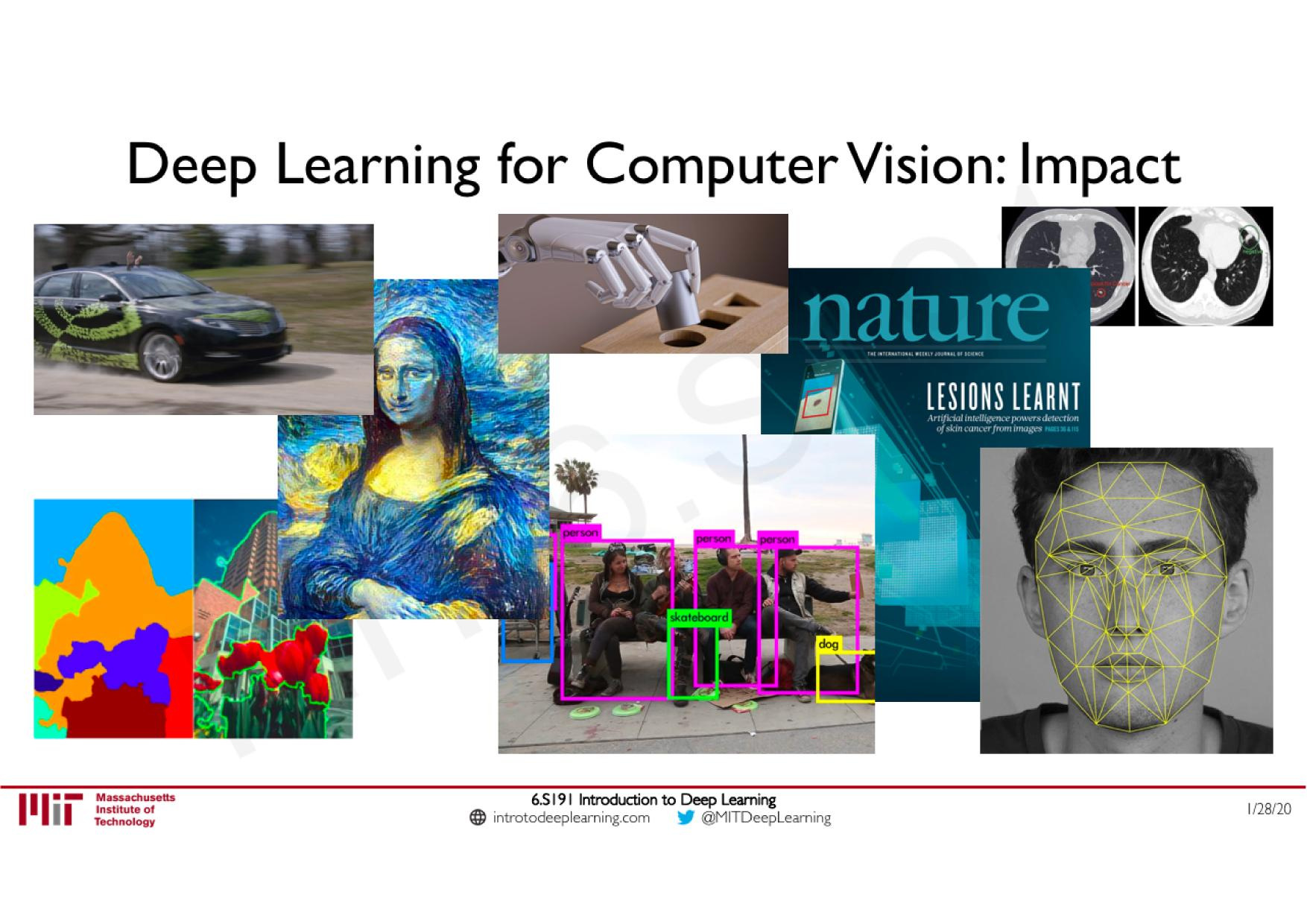
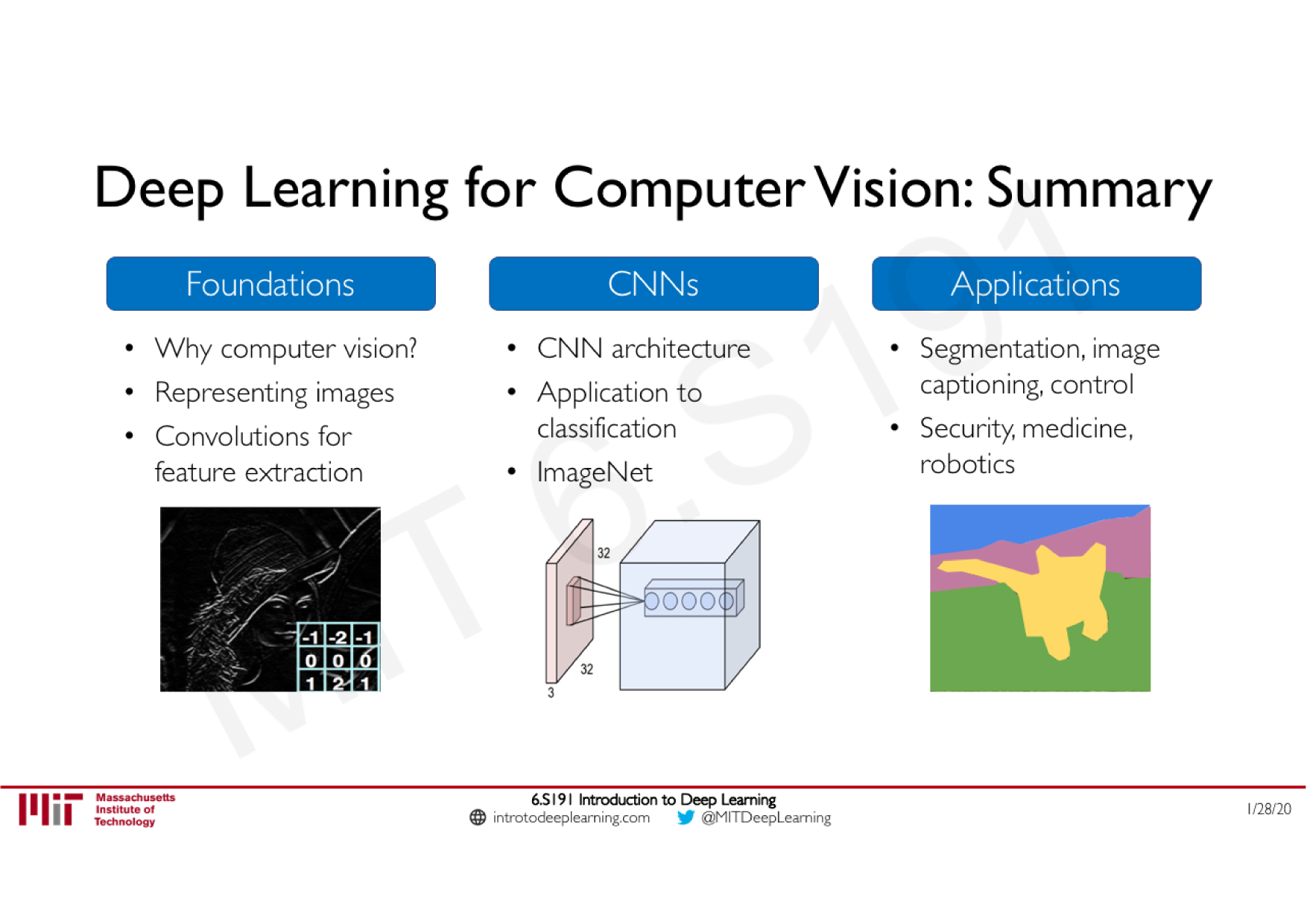
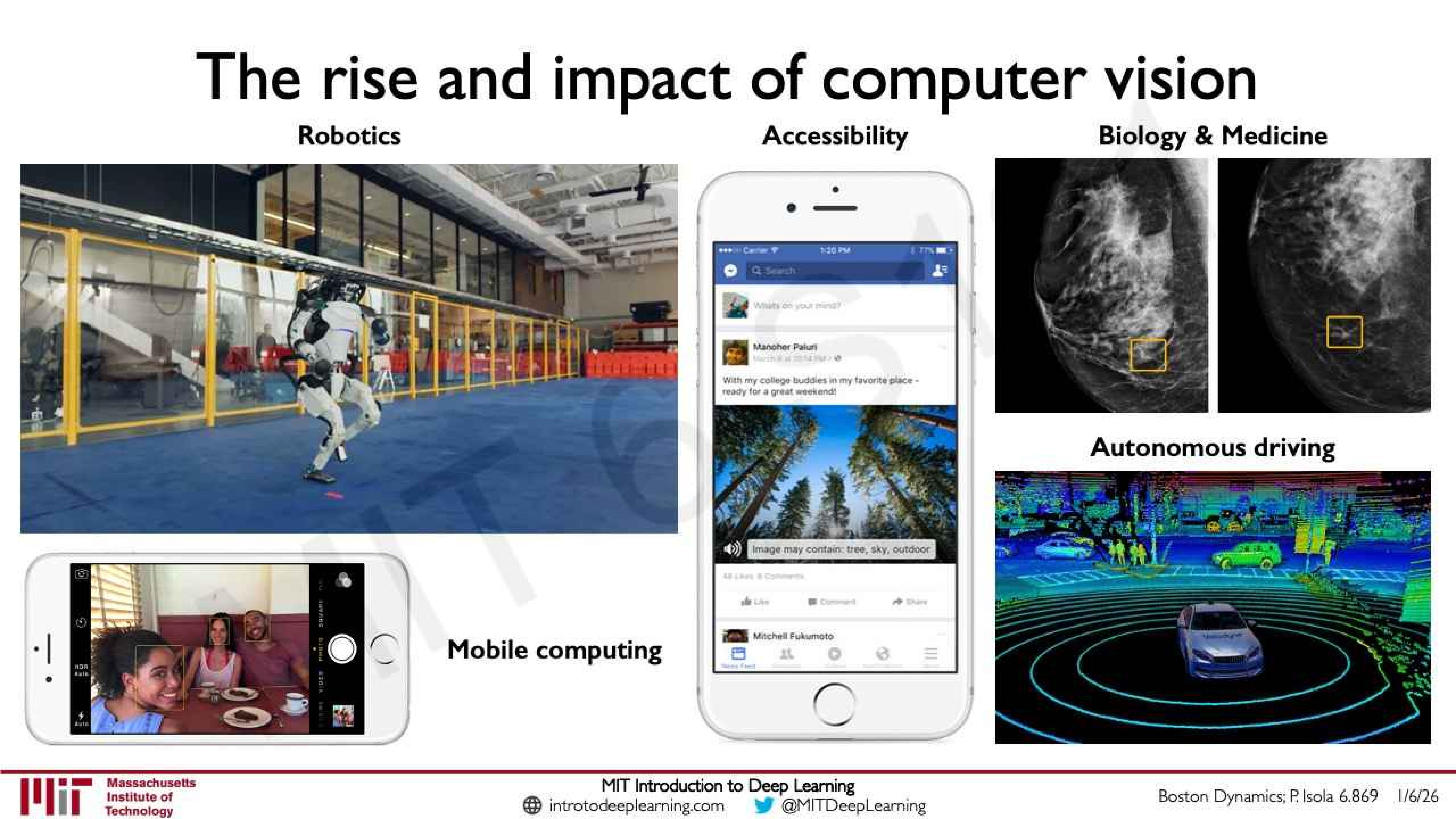
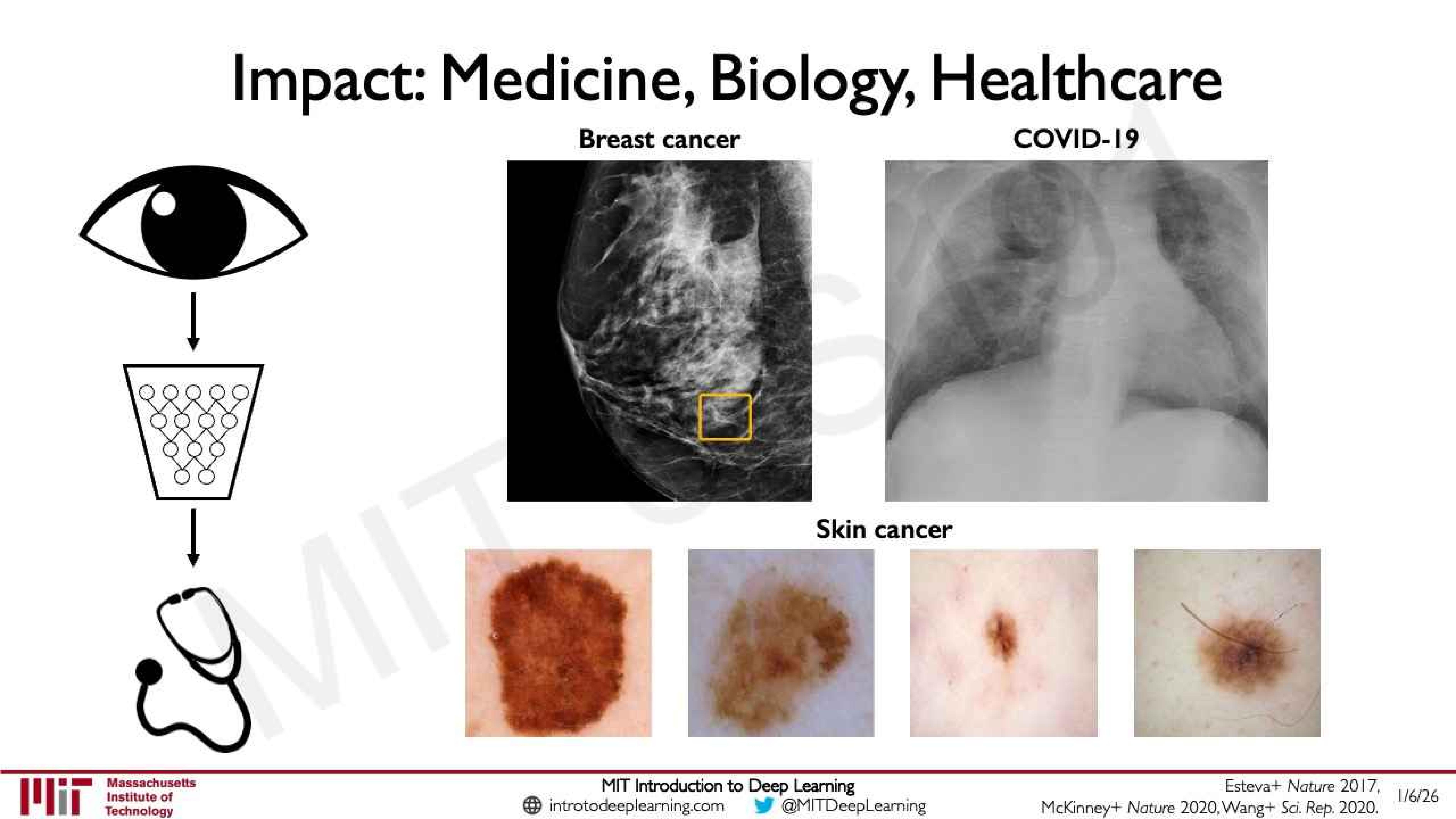
Quelques applications ...
...
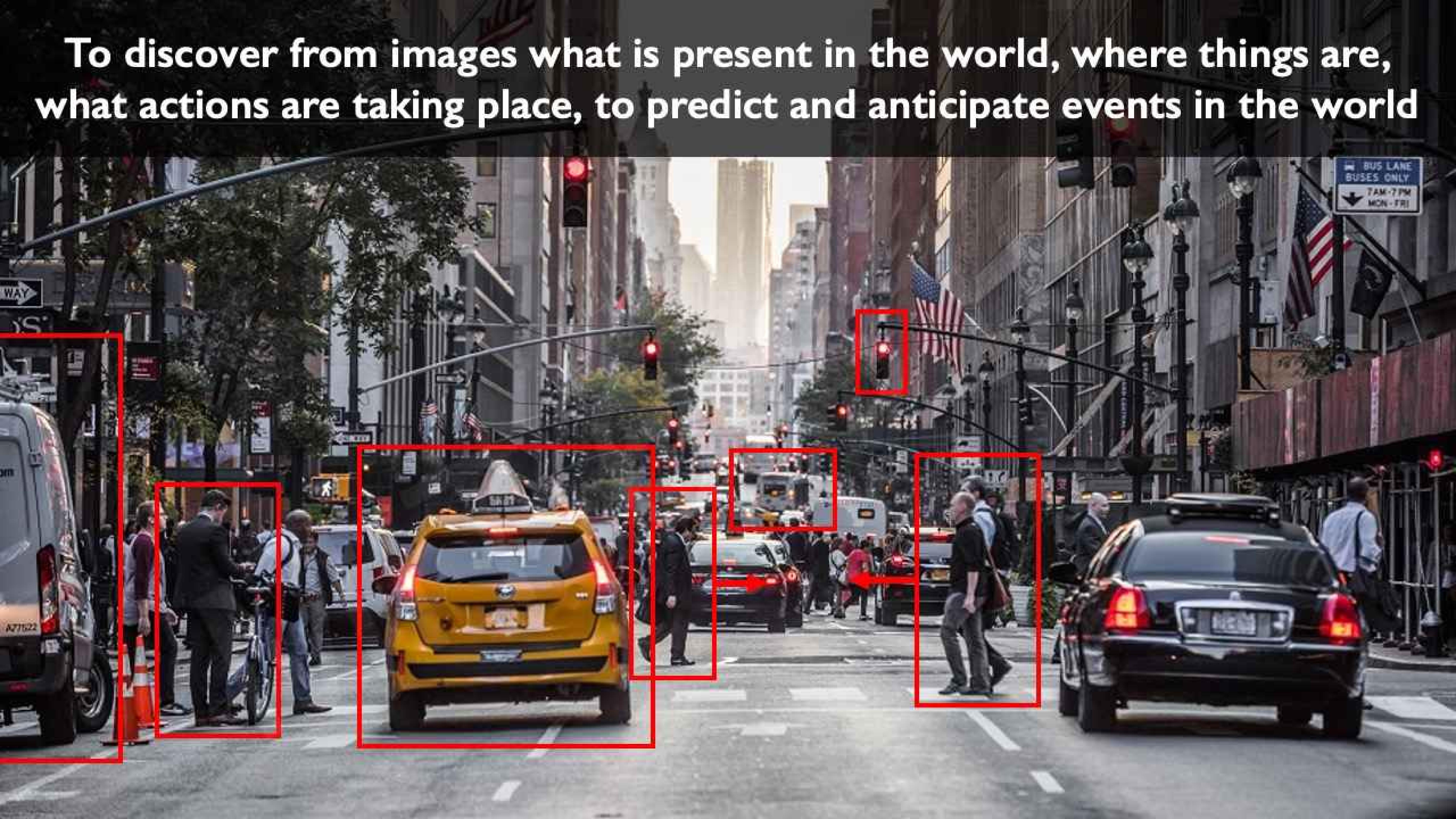
Description
d'une scène visuelle
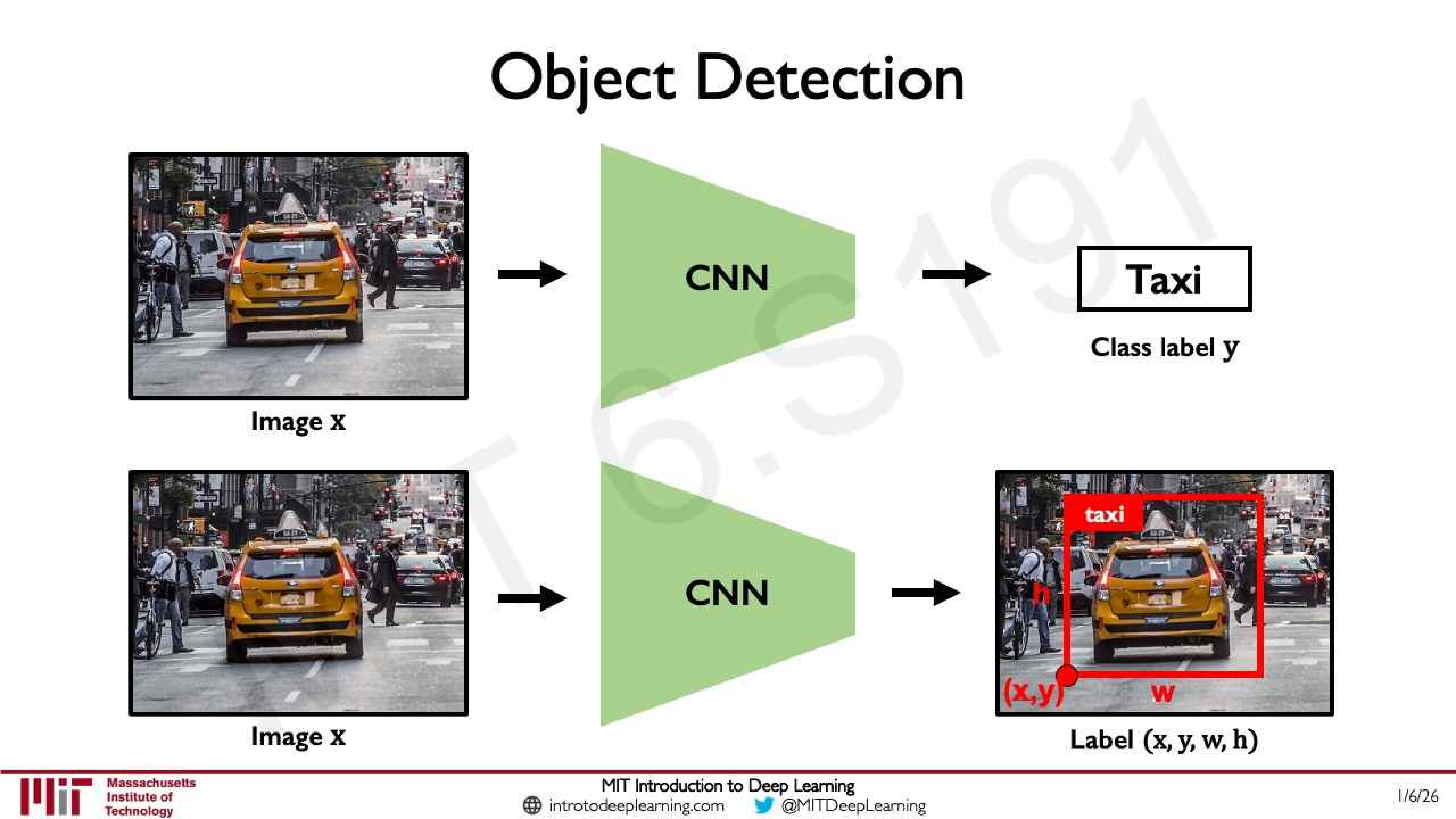
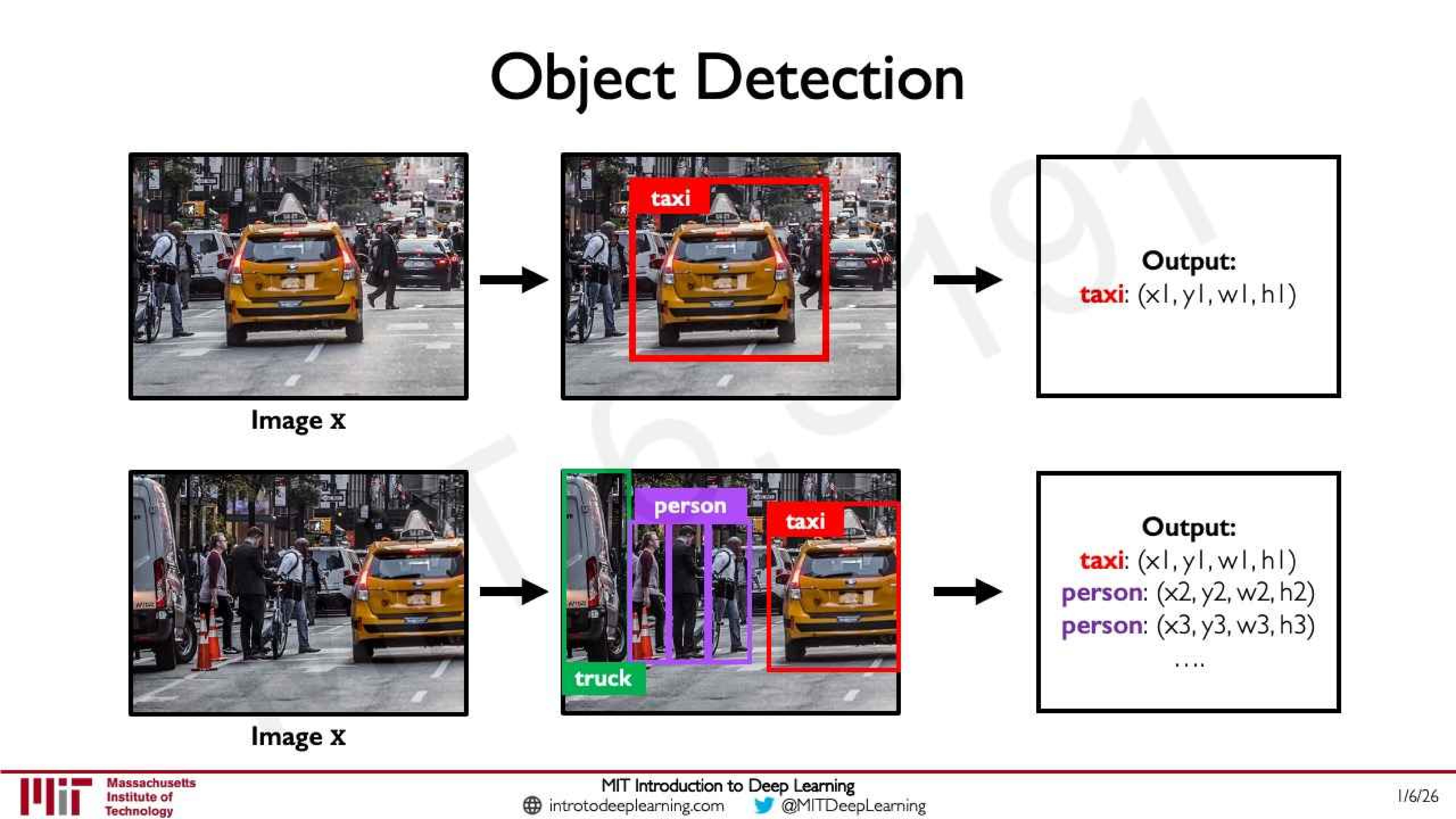
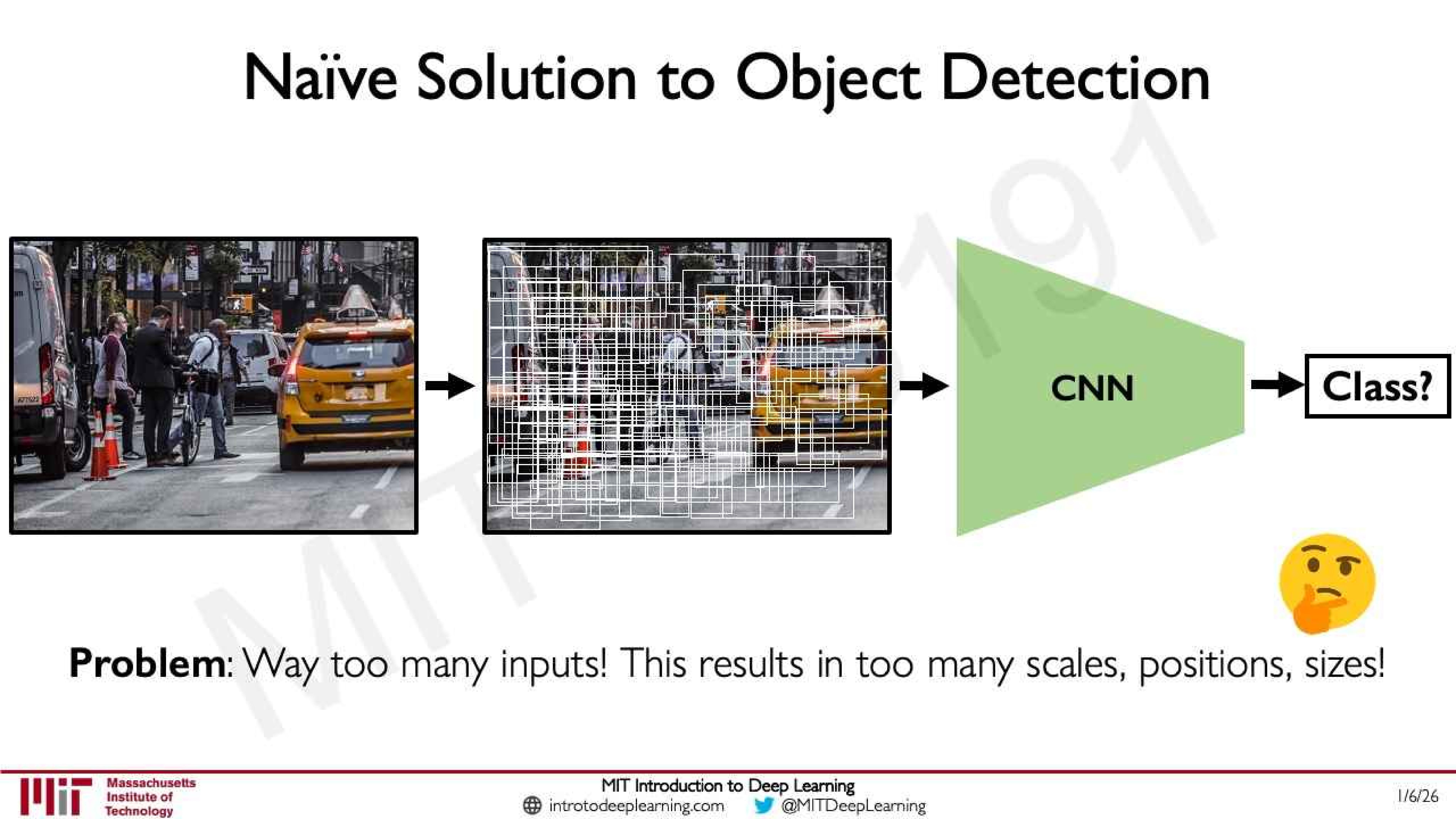
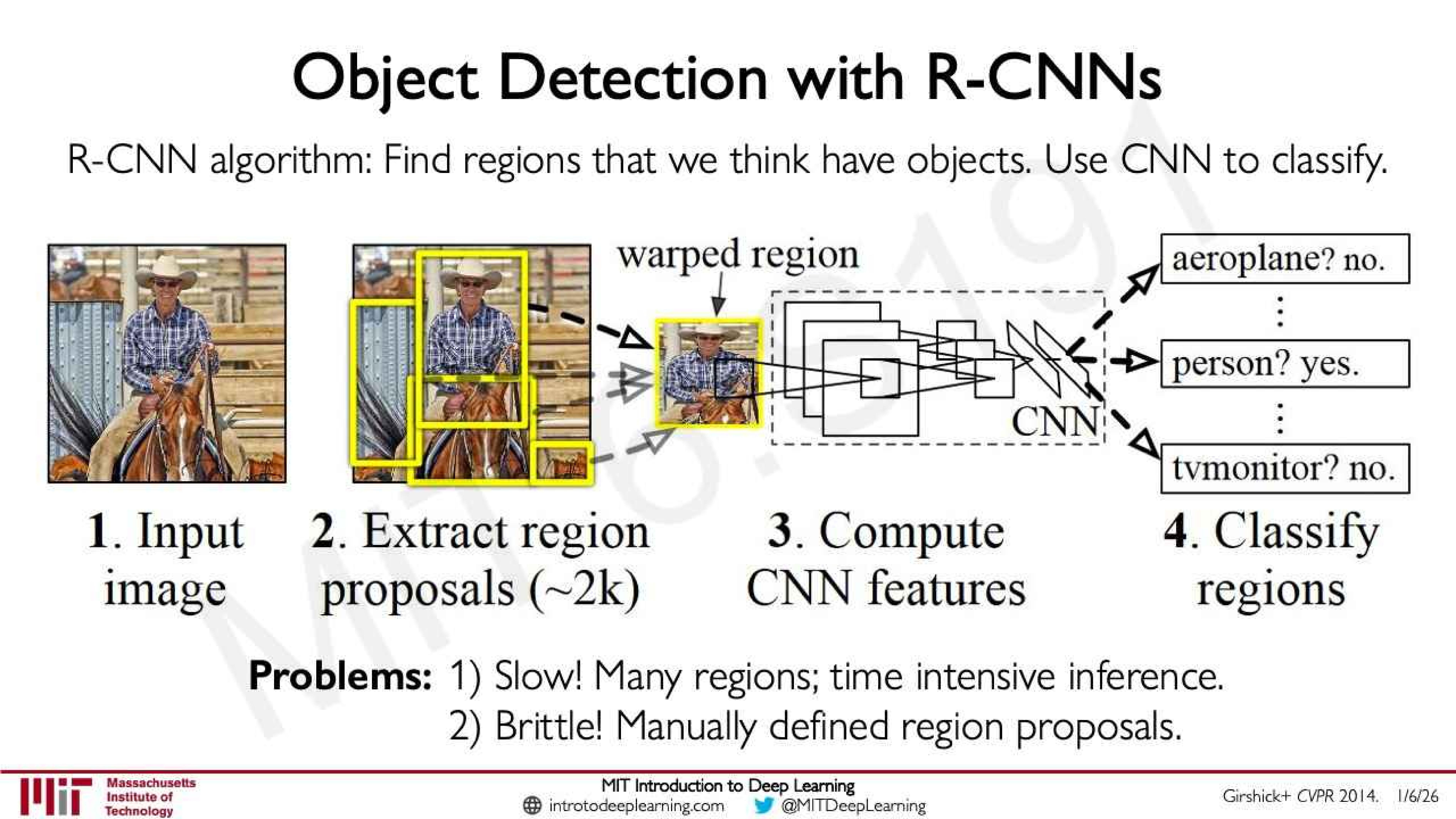
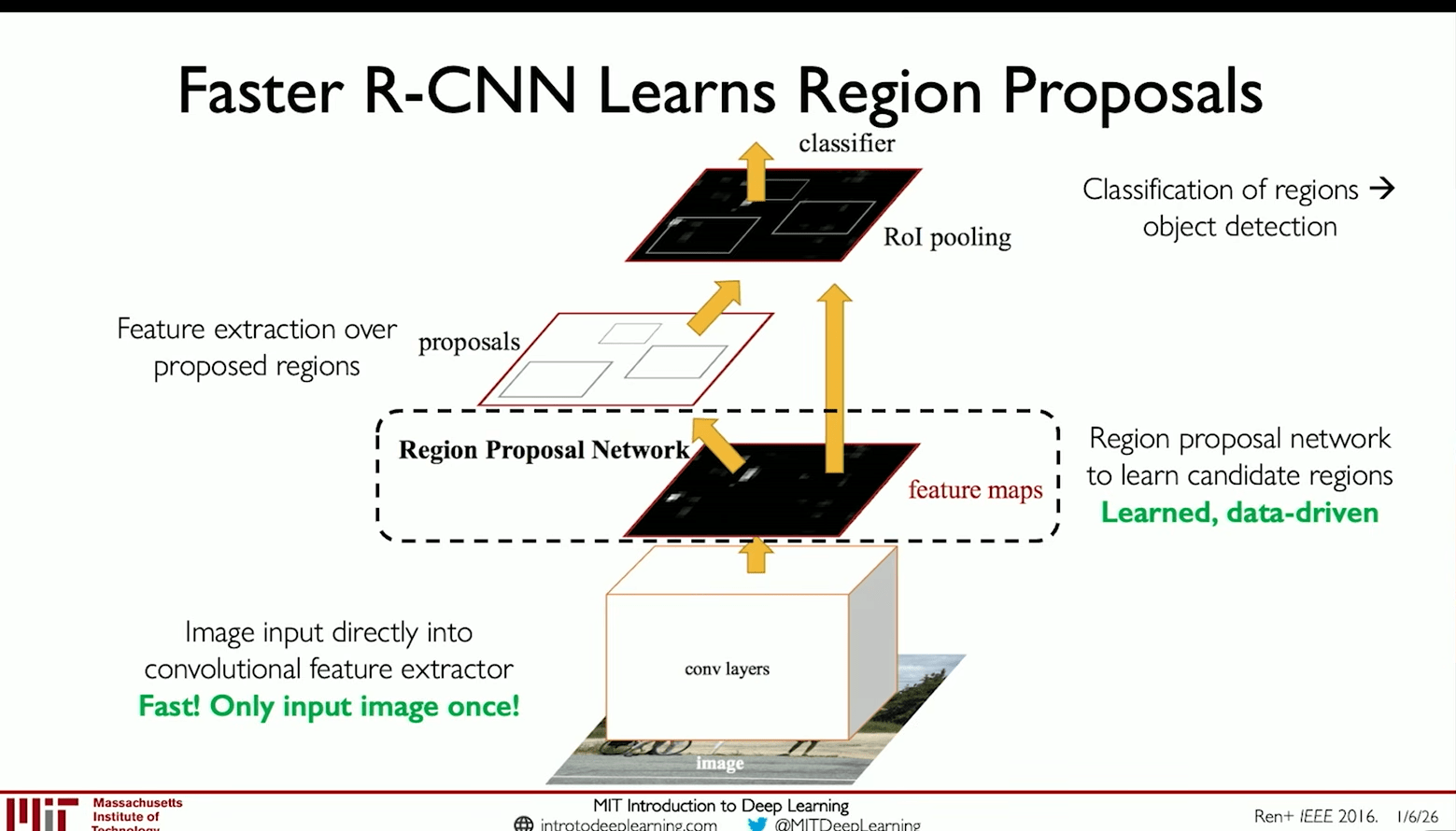
Identification des objets
d'une scène visuelle
Colorisation
Détection de pose
Transfert de style
Capture de mouvements
Amélioration de photos
Reconnaissance faciale
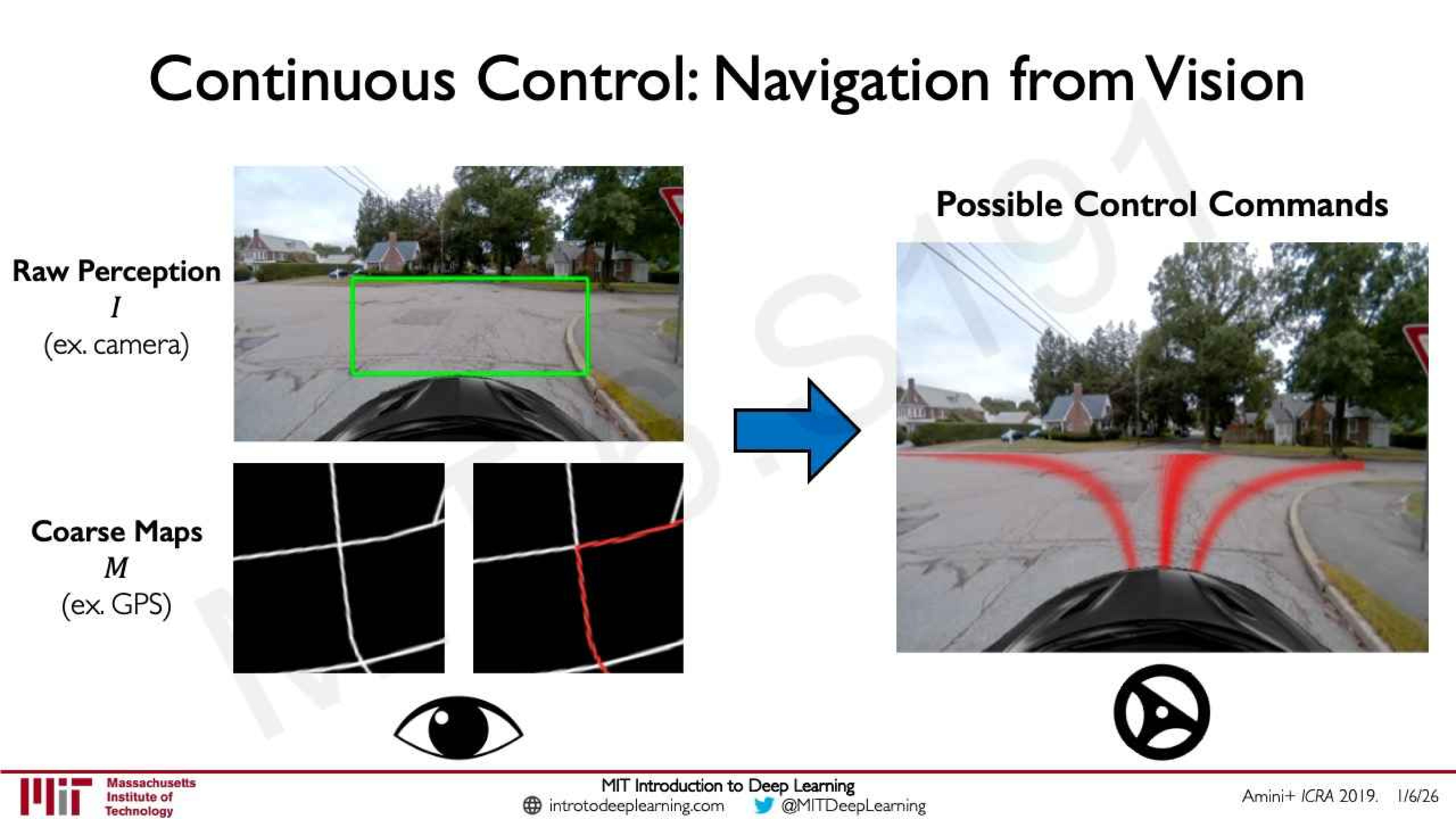
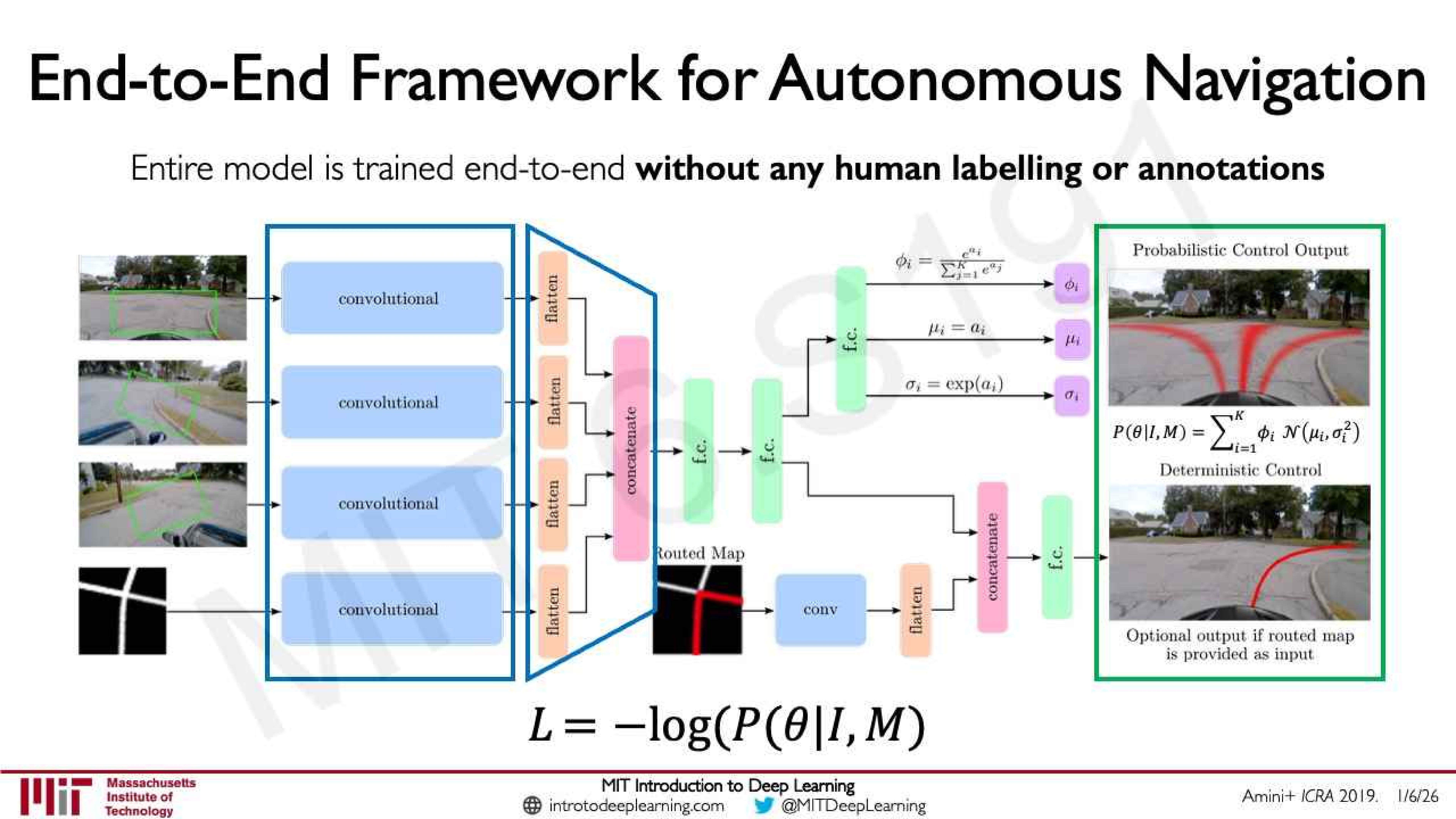
conduite autonome
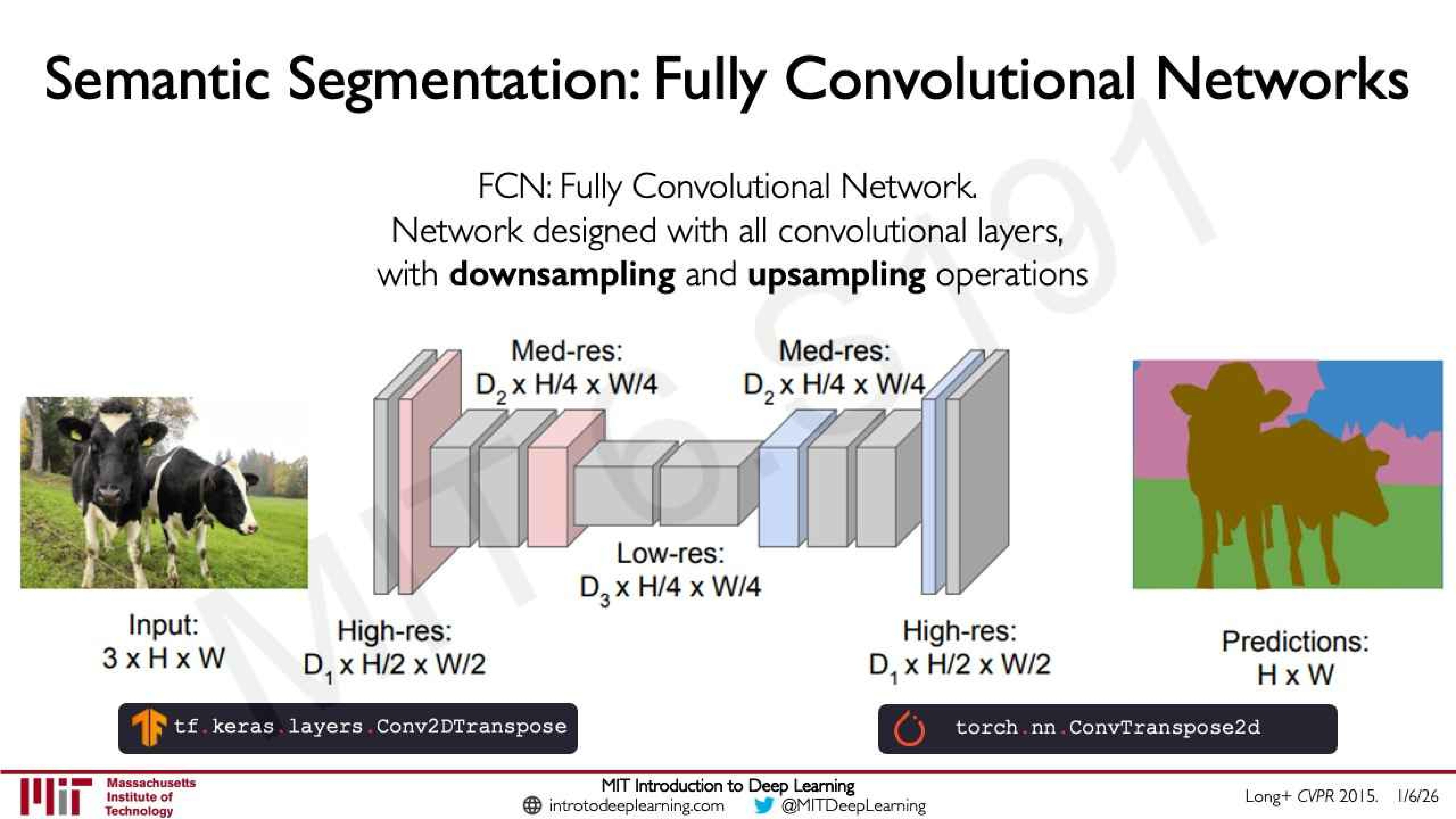
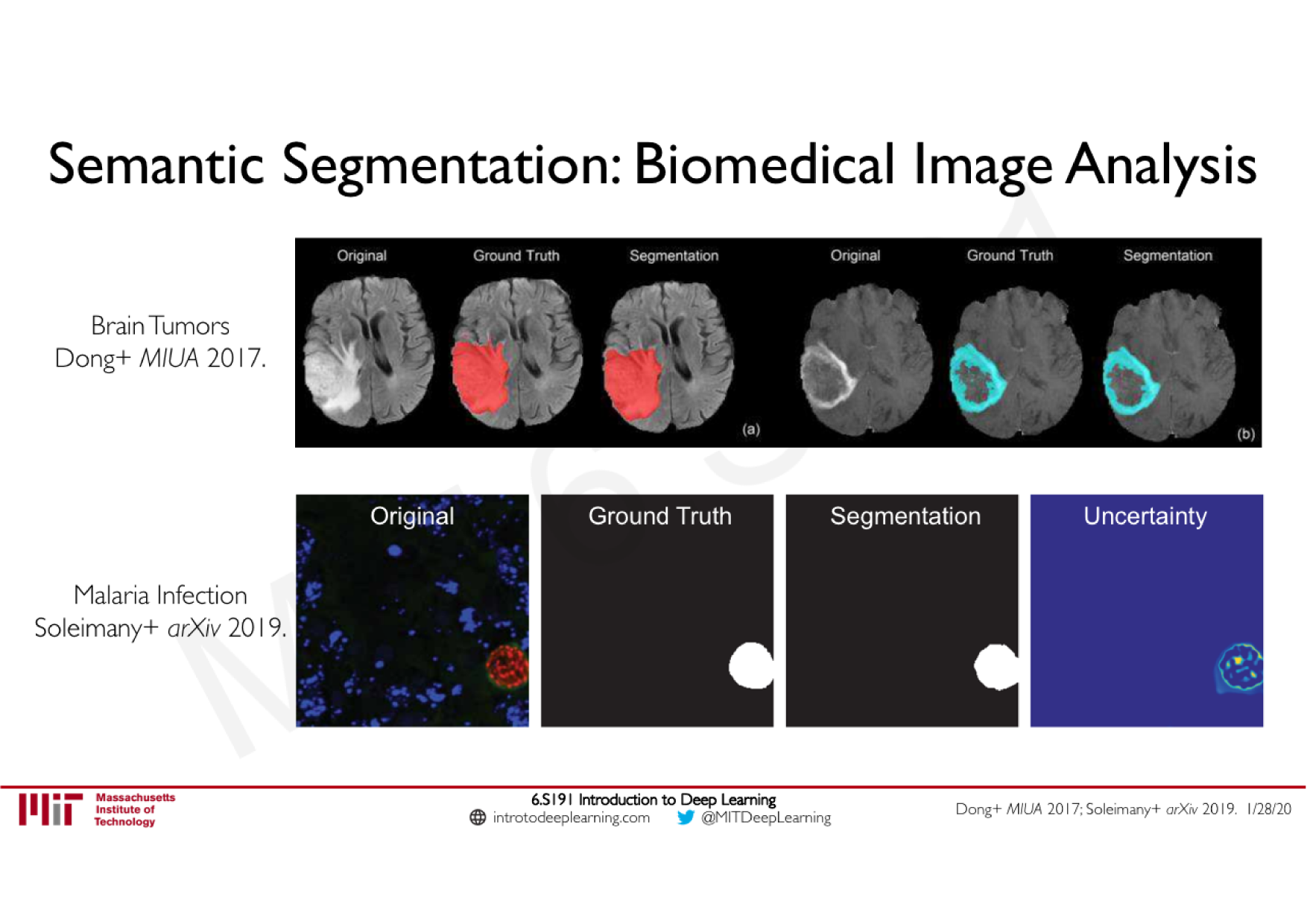
segmentation d'image
Reconnaissance d'image(s)
Transformation d'image(s)
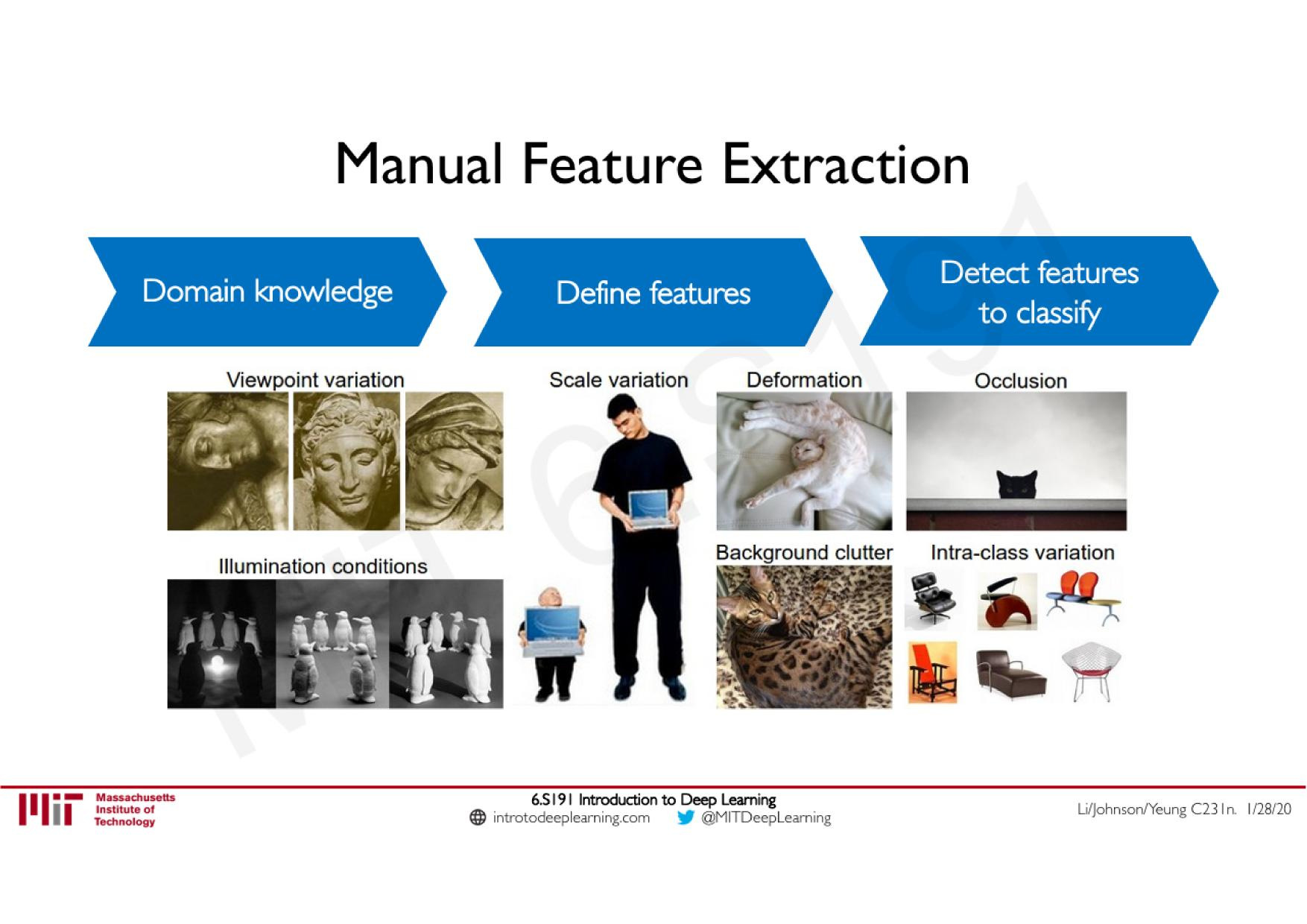
Extraction de propriétés
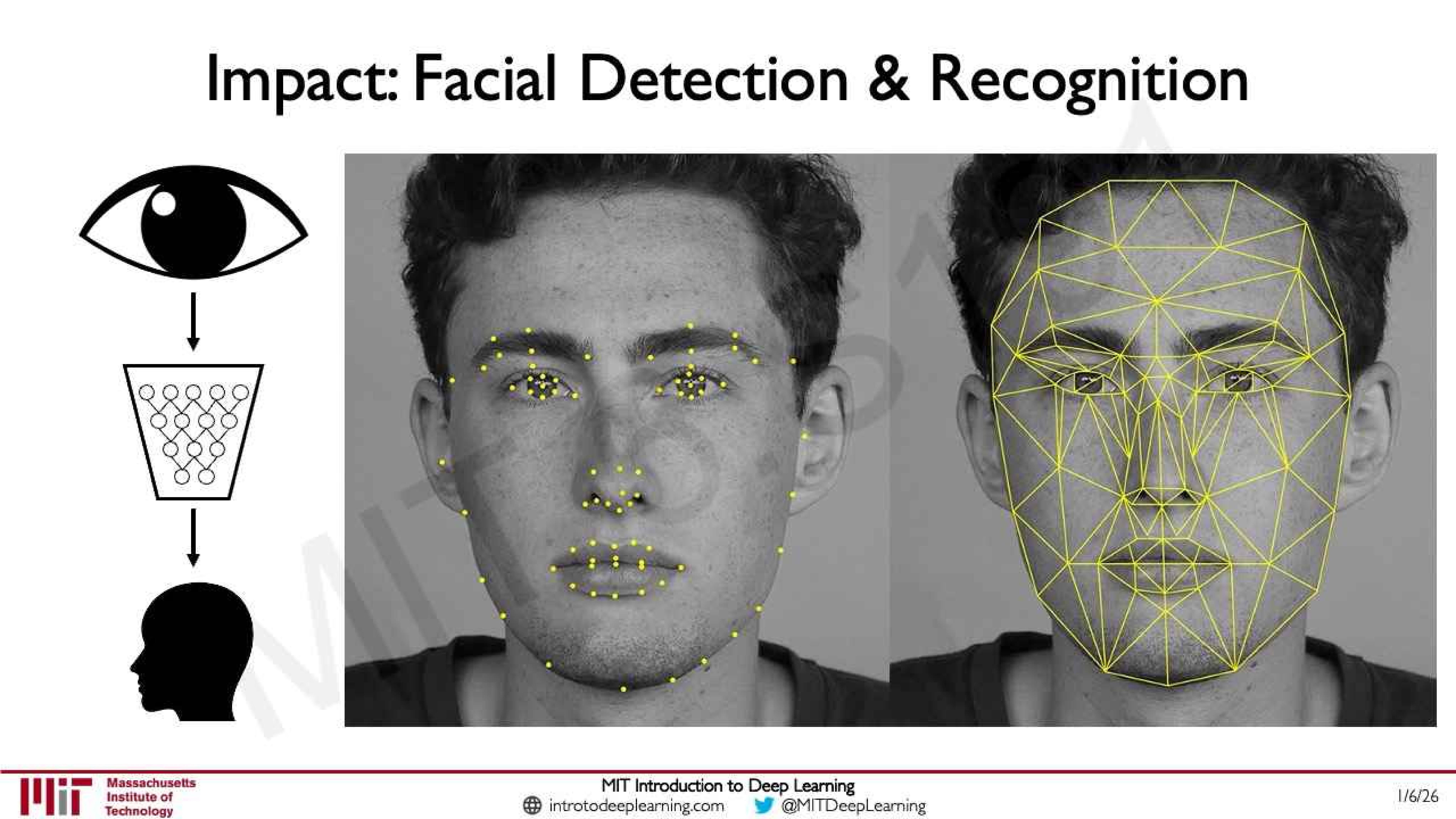


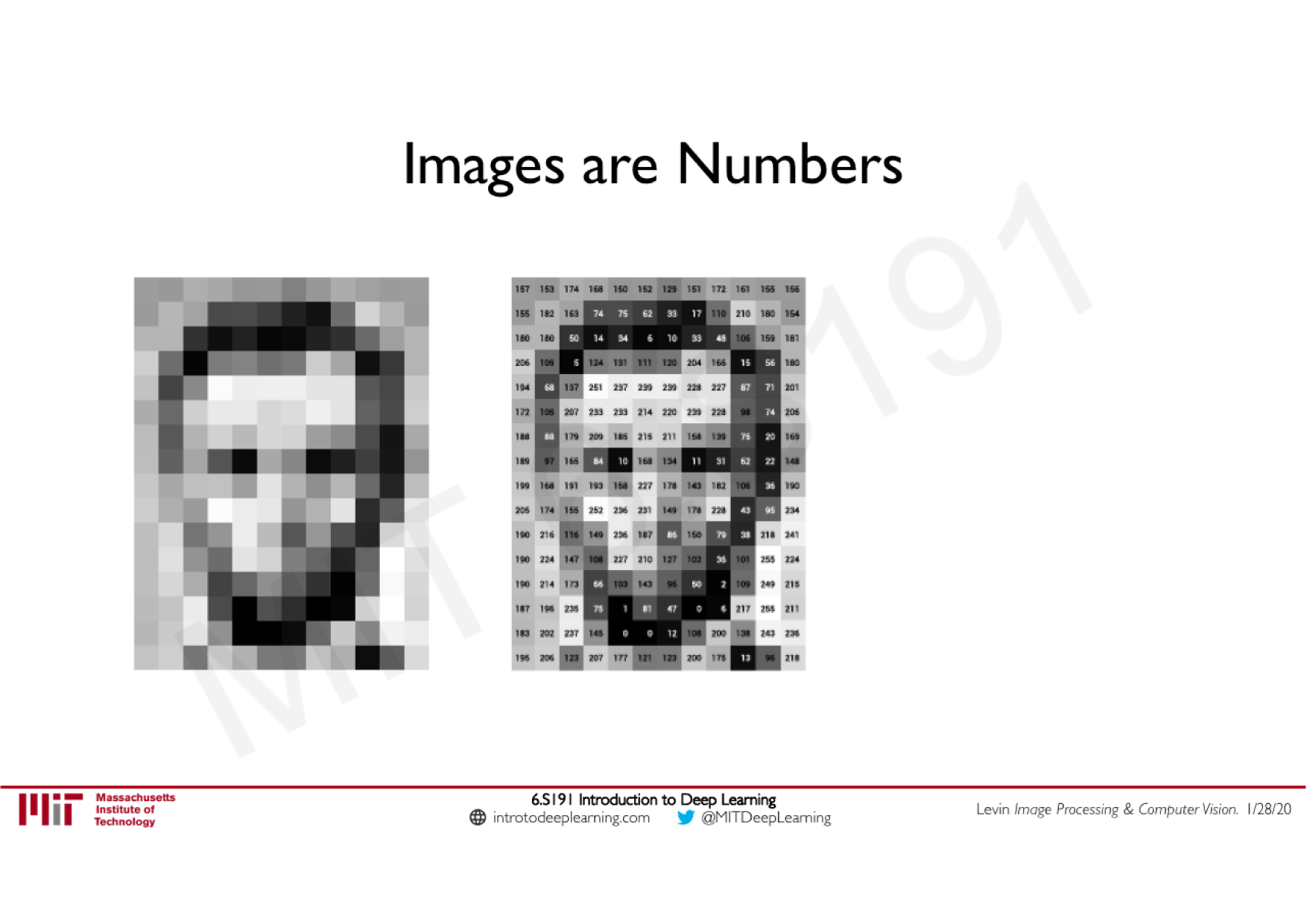
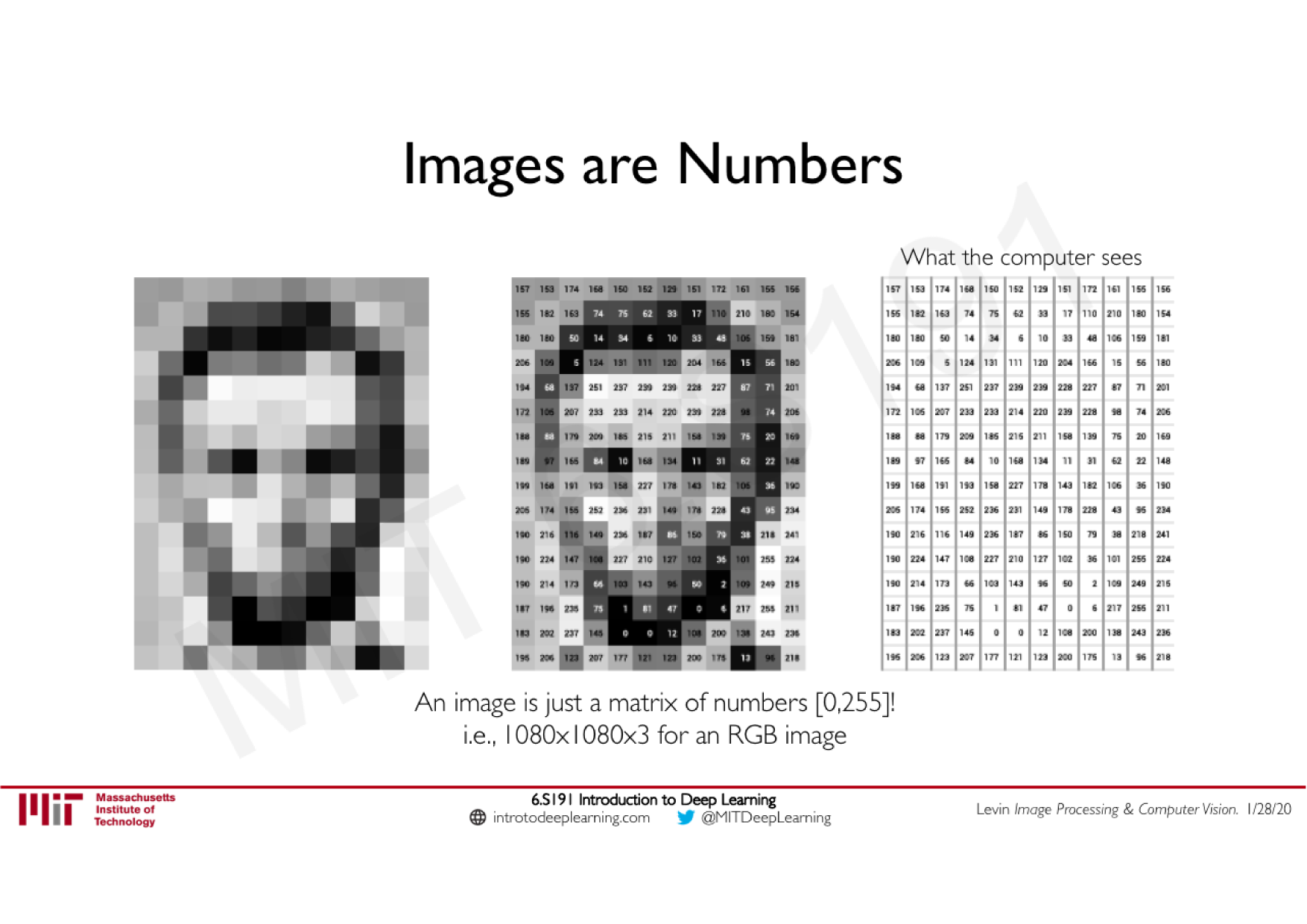
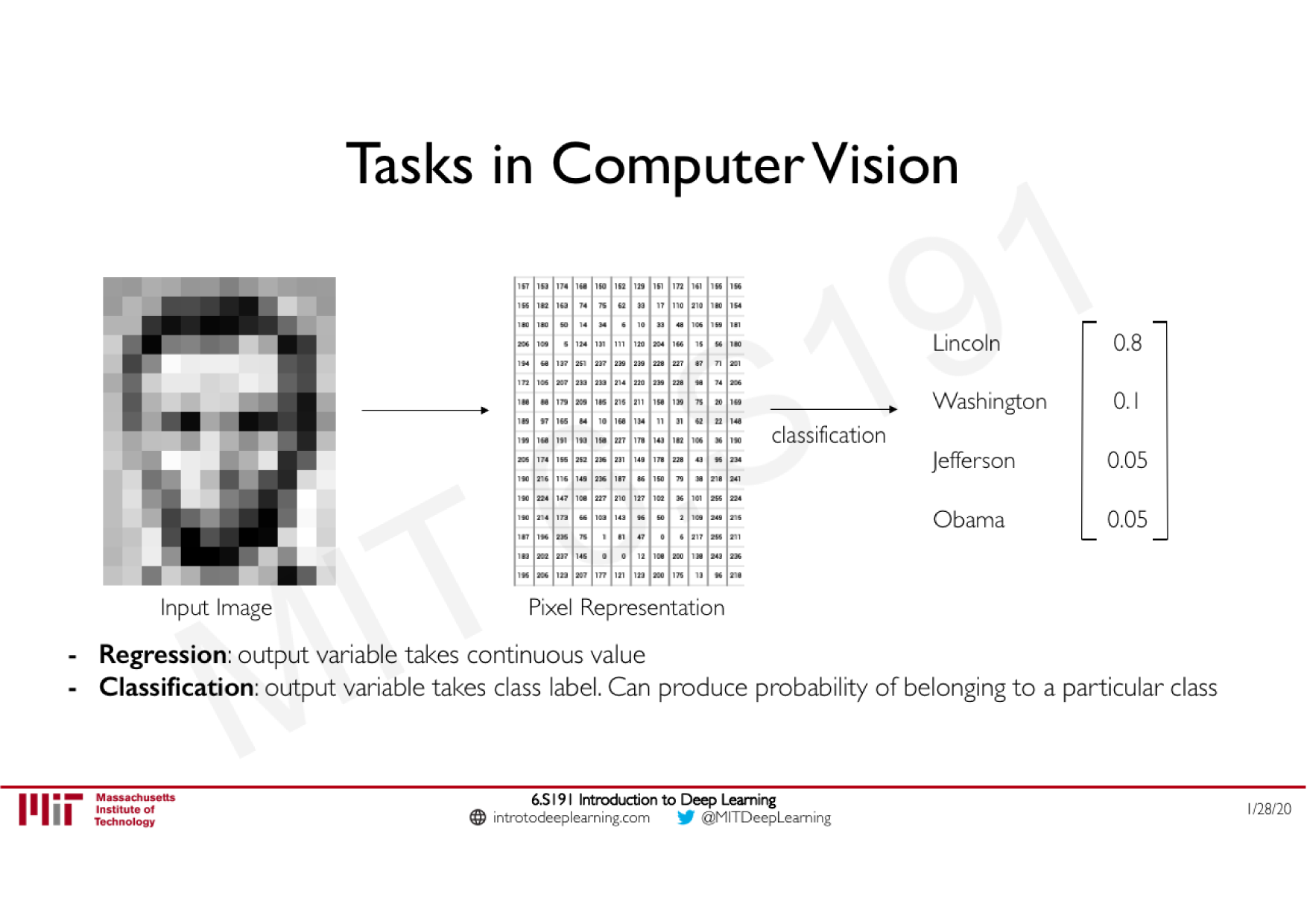
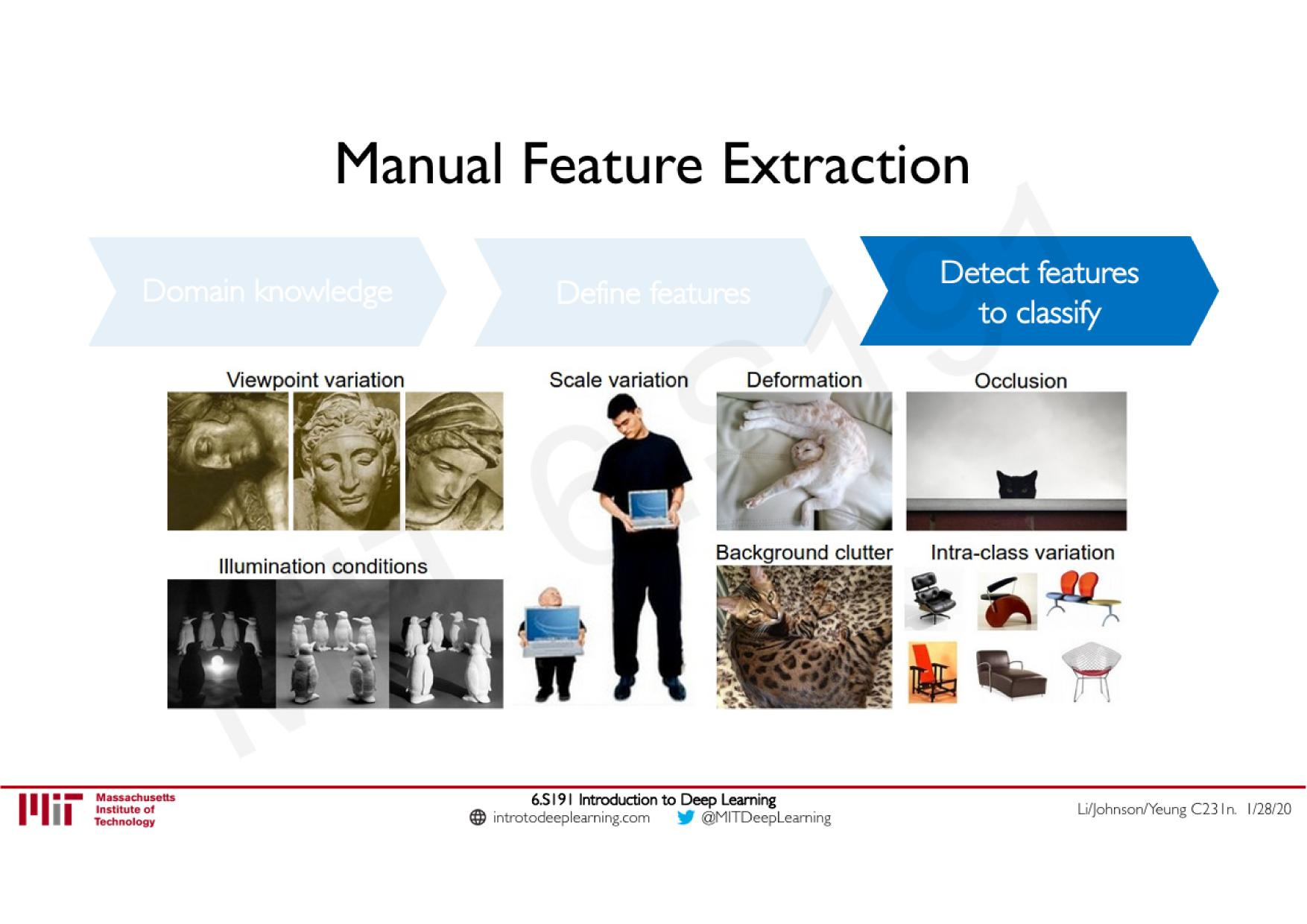
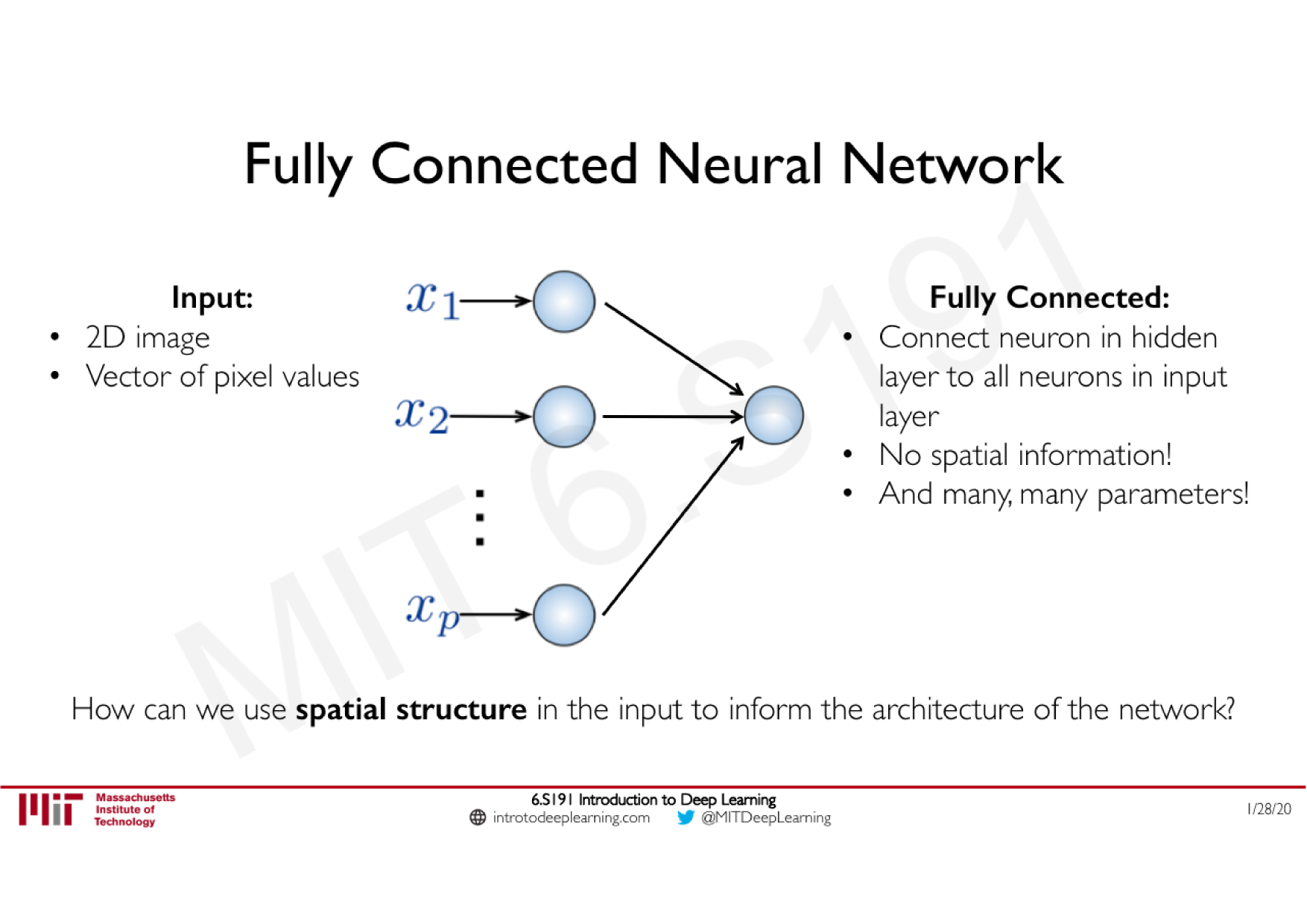
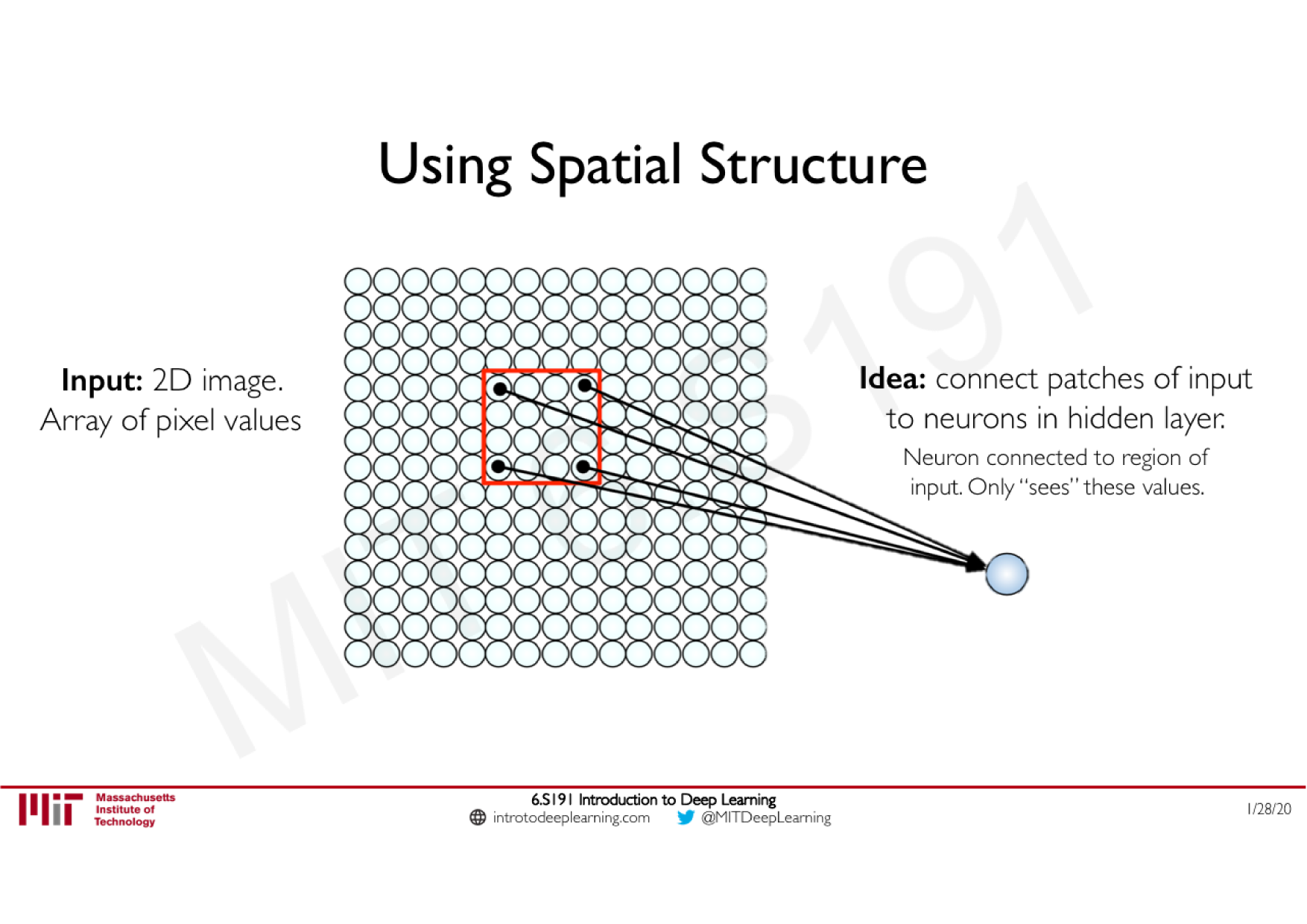
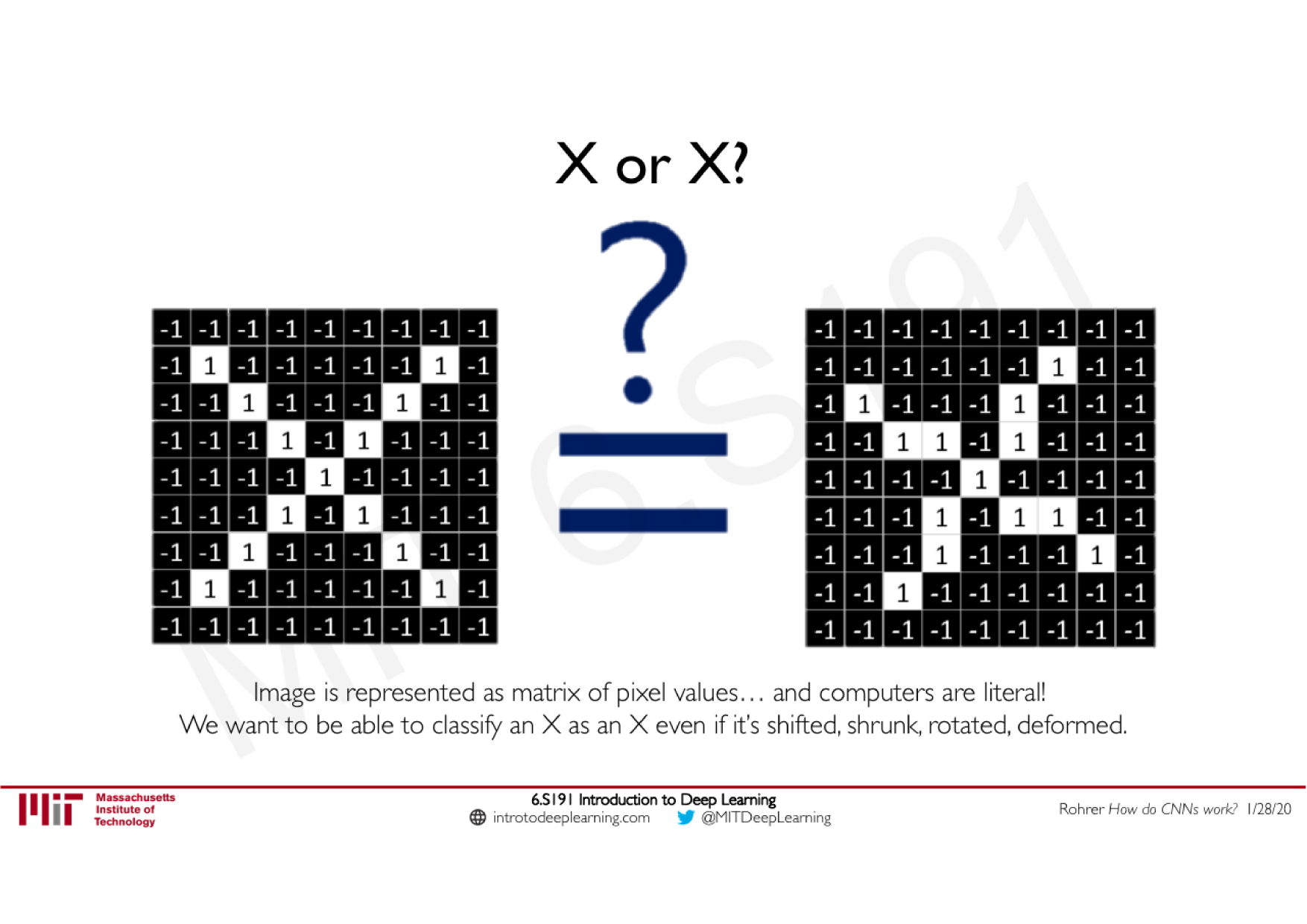
Comment les ordinateurs "voient" ils ?
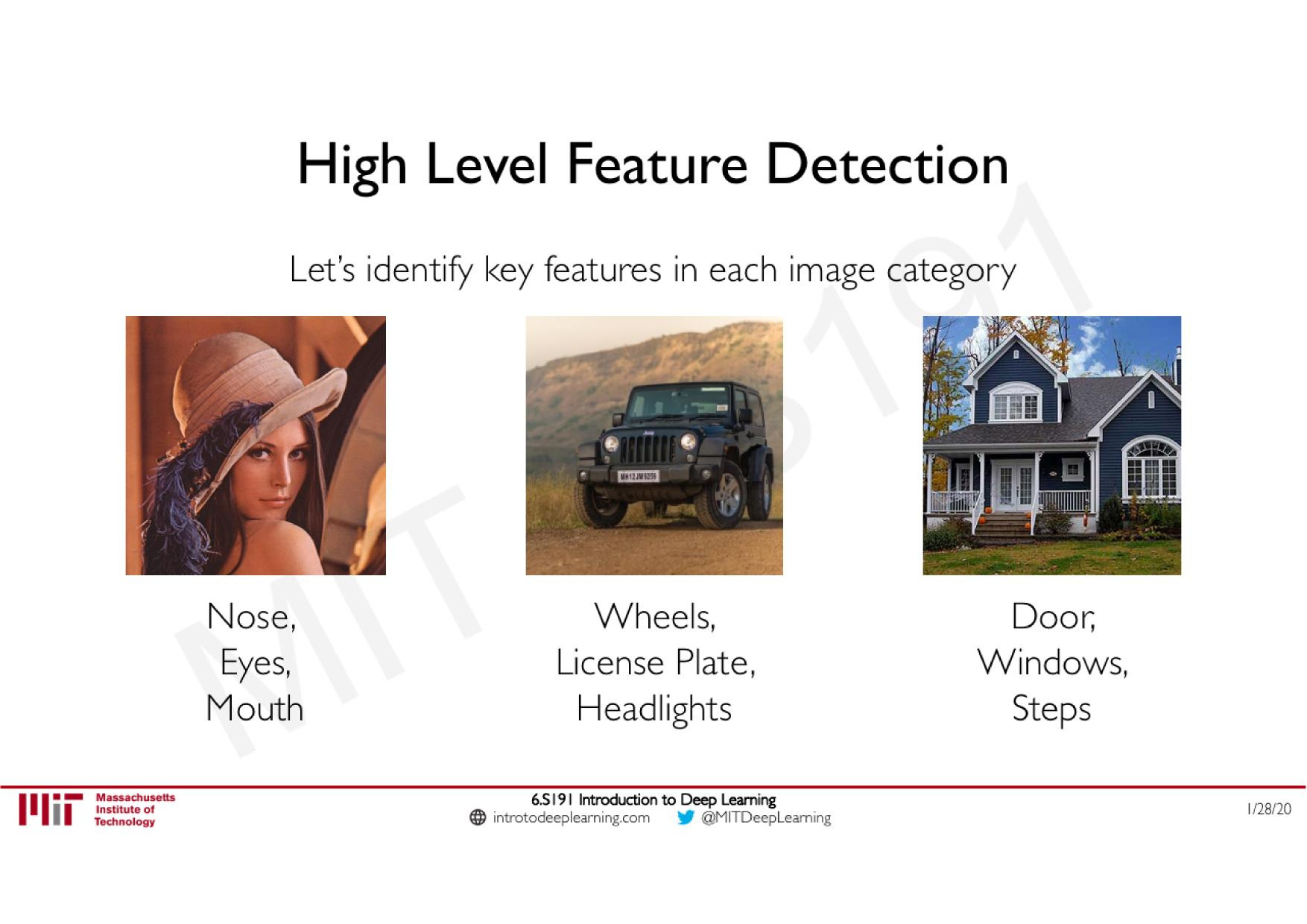
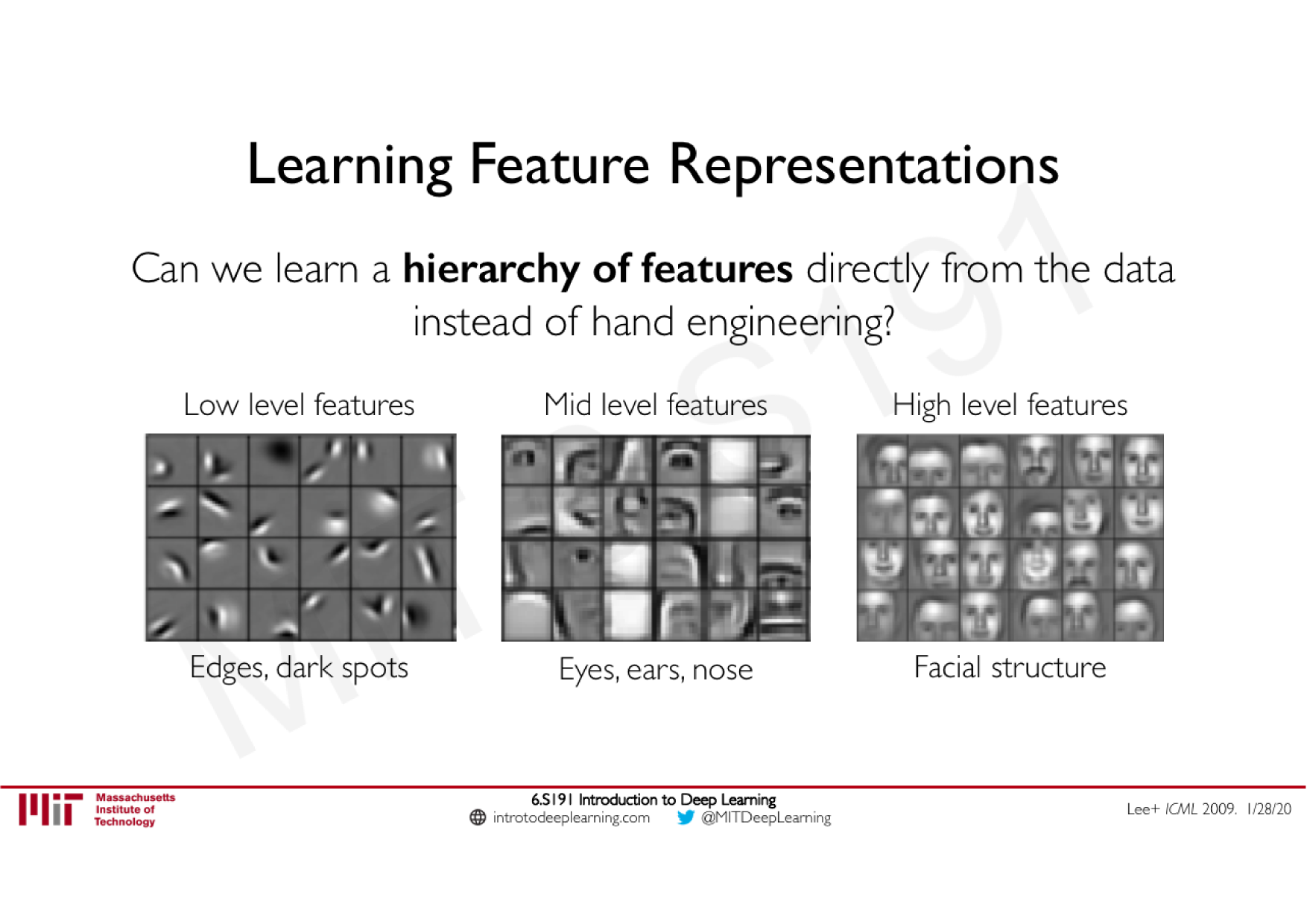
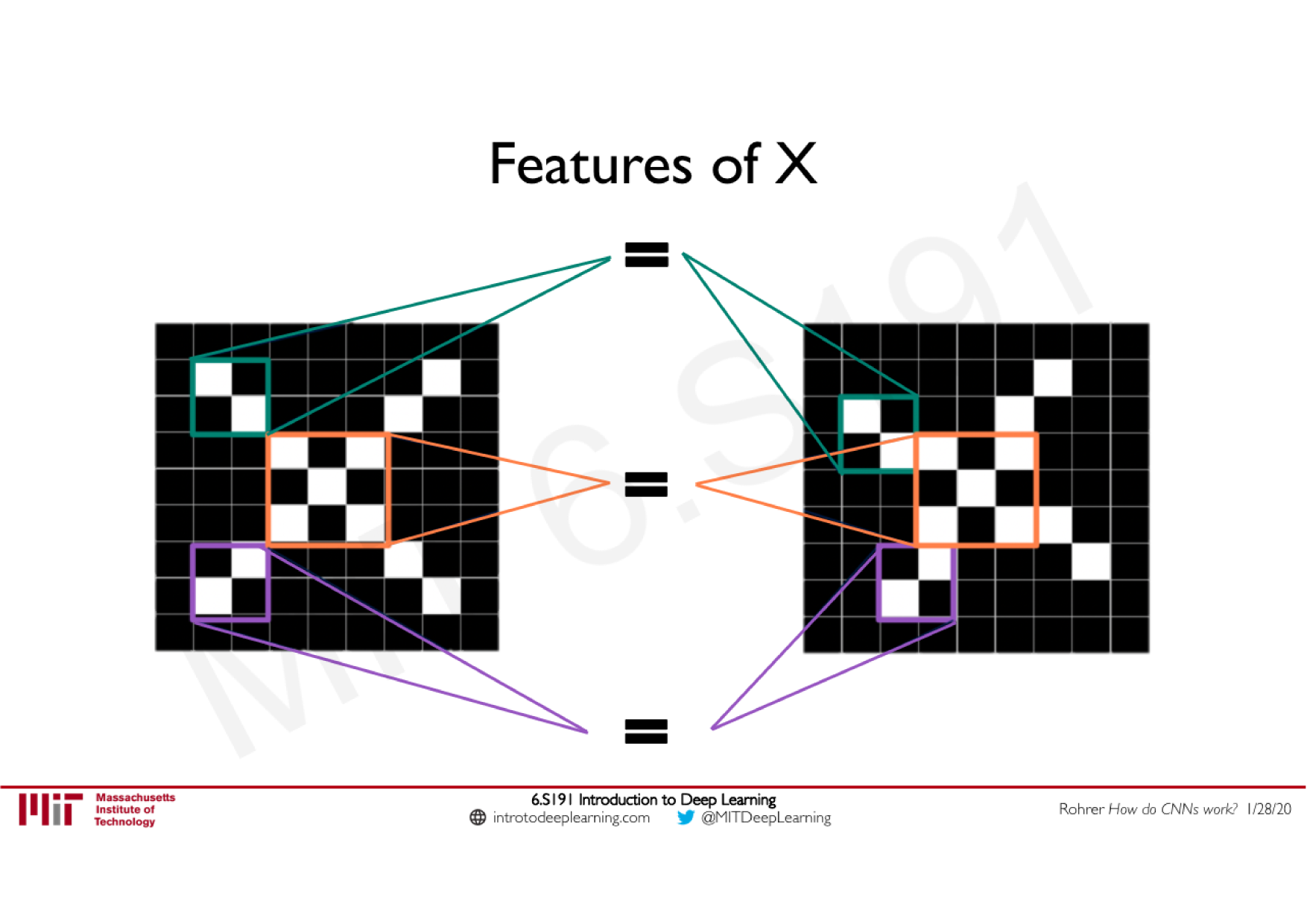
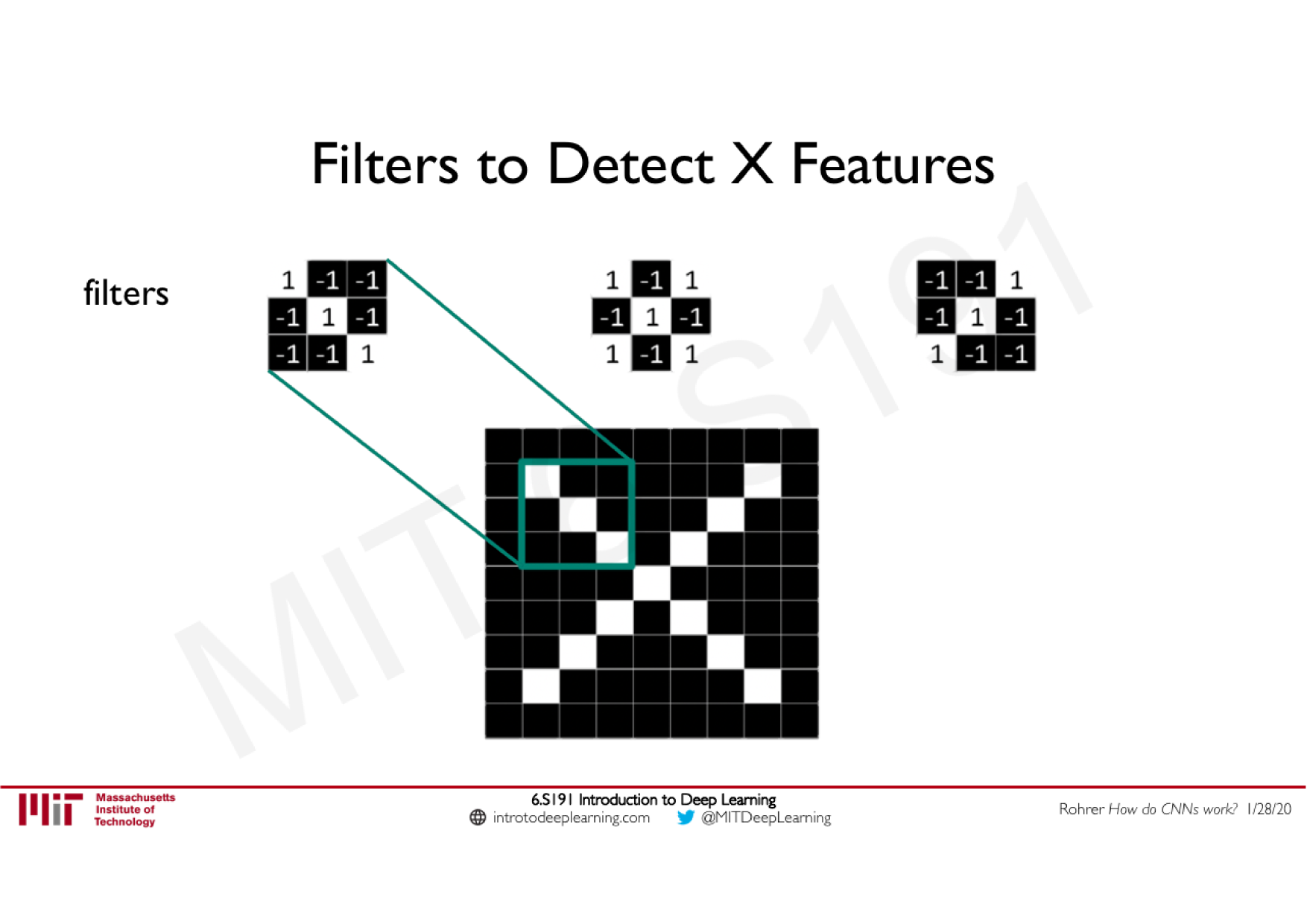
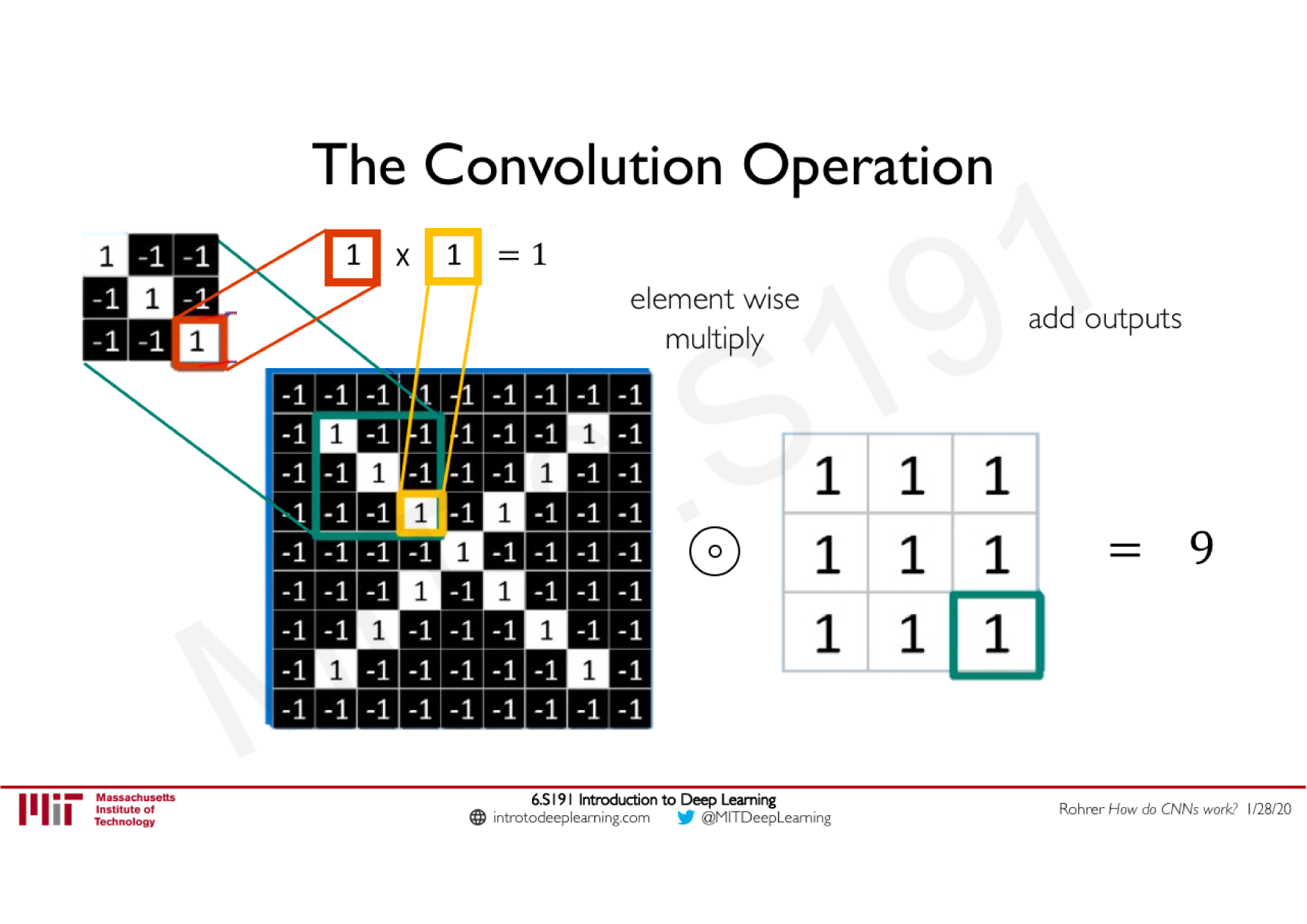
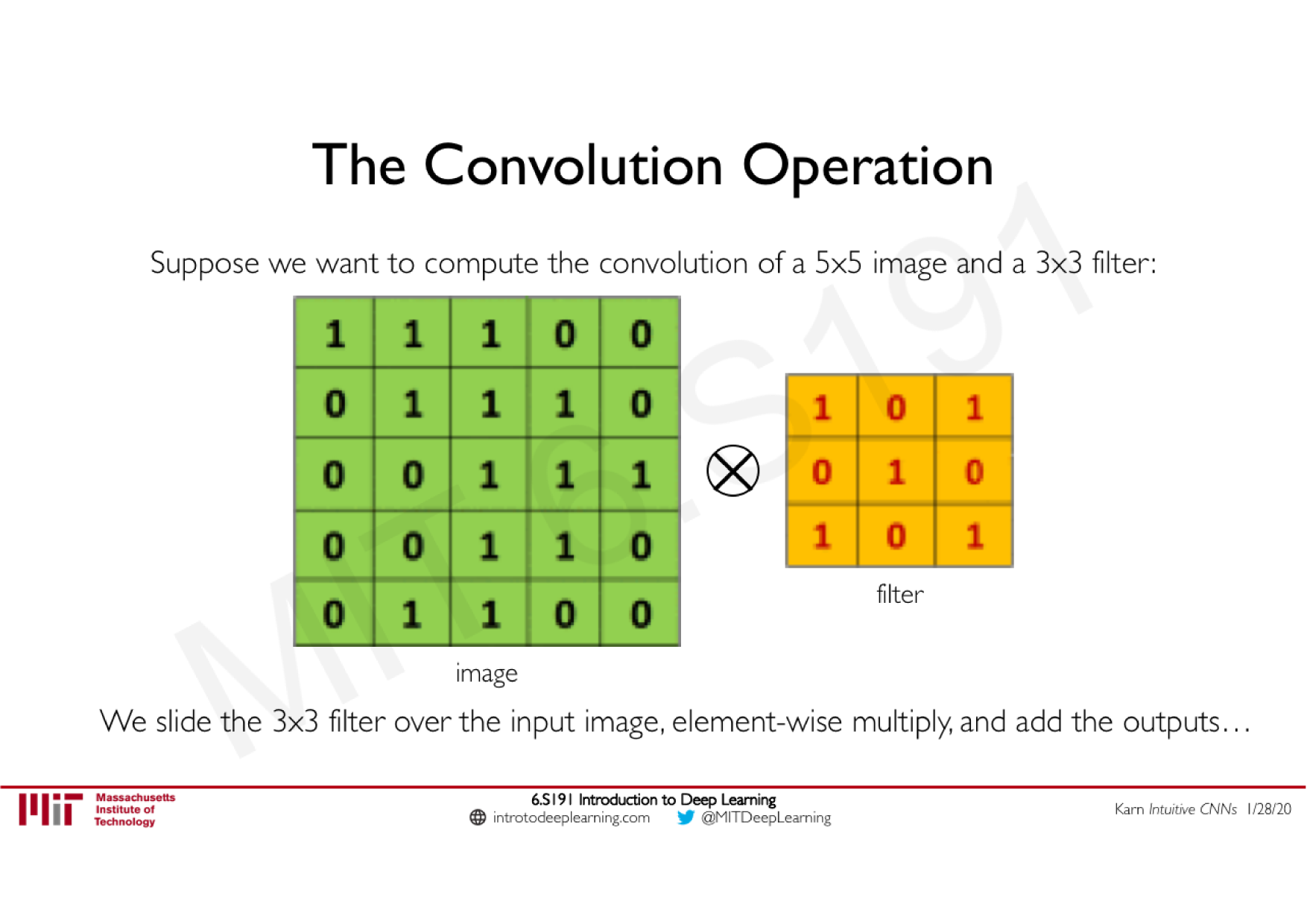
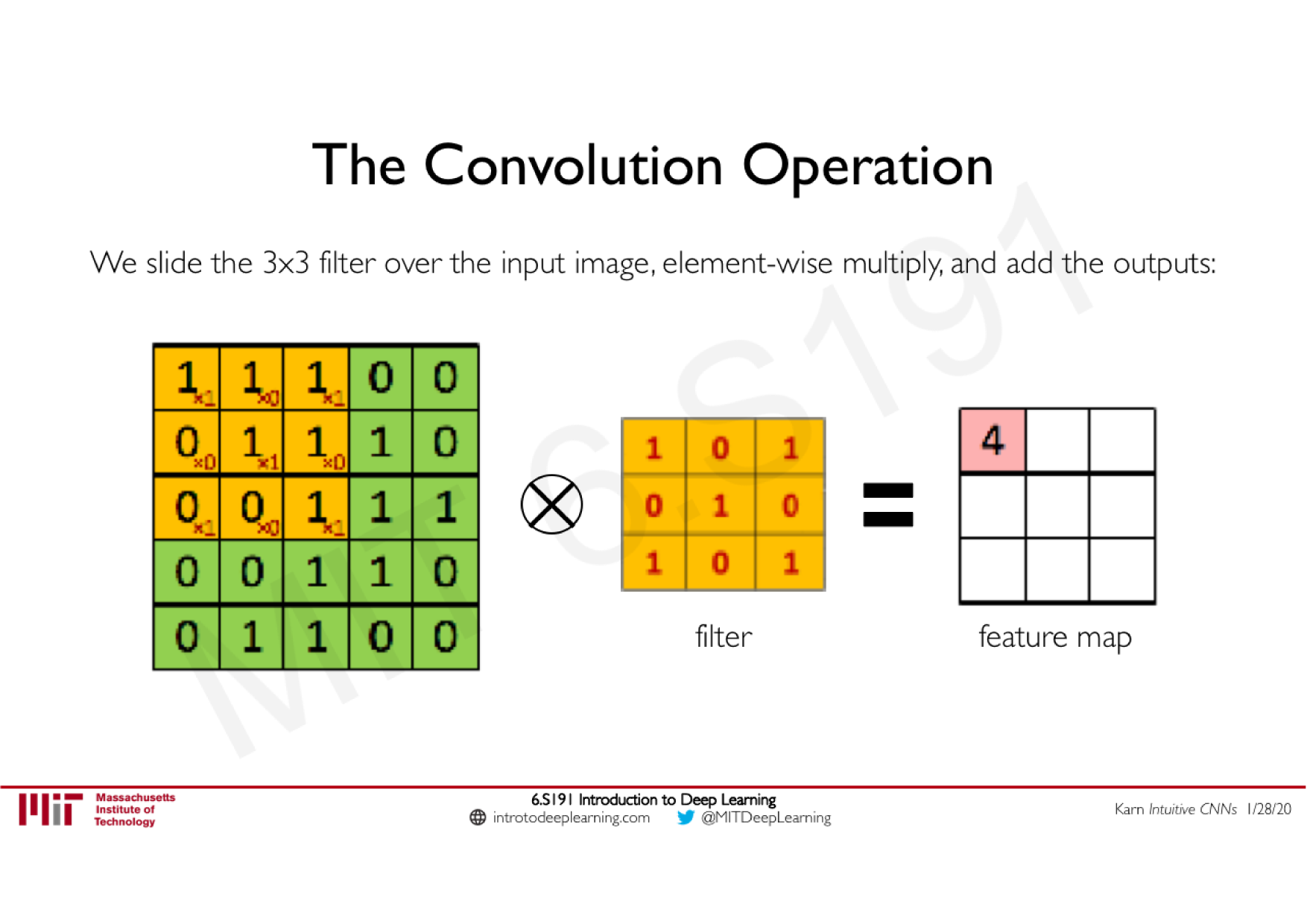
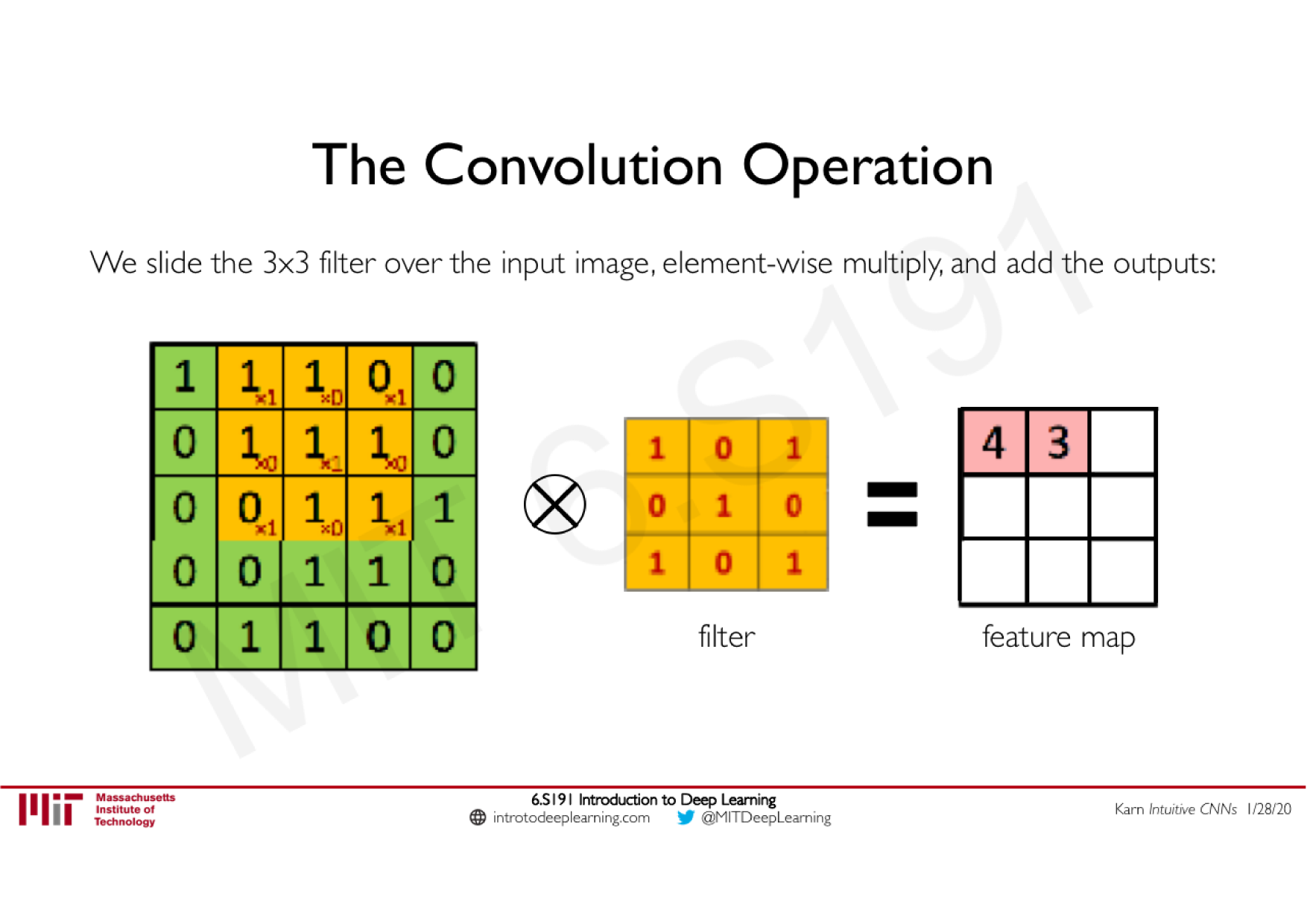
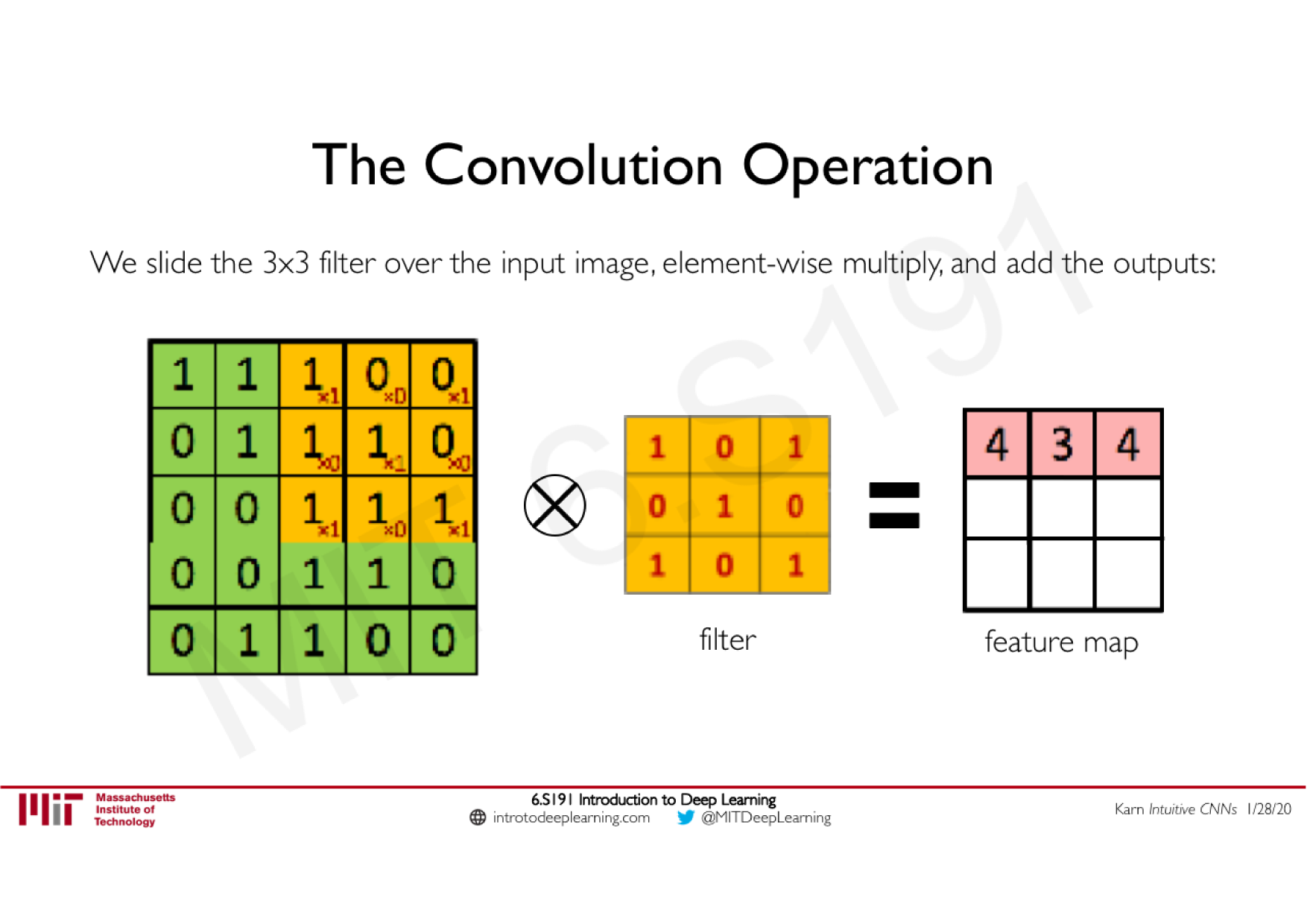
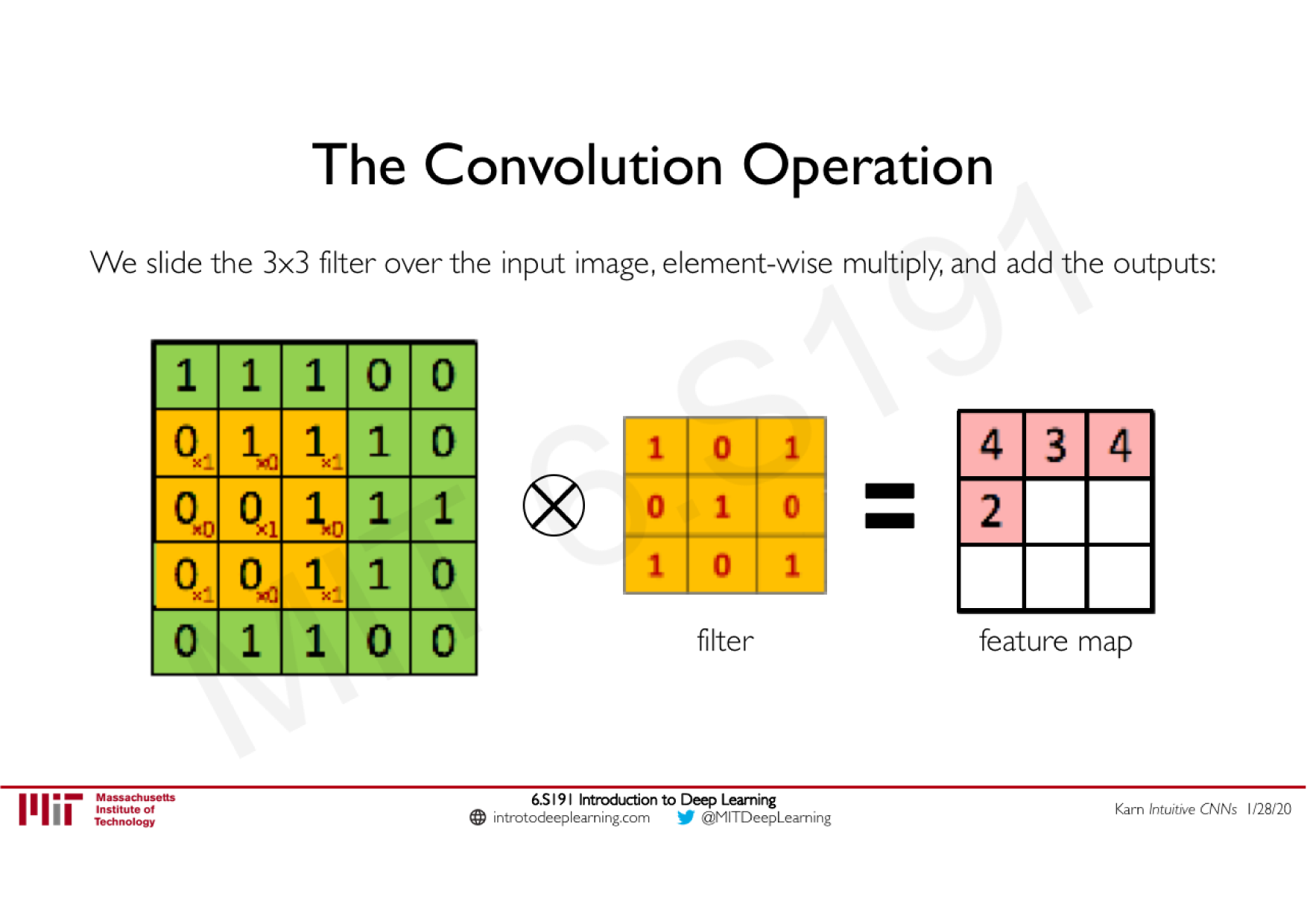
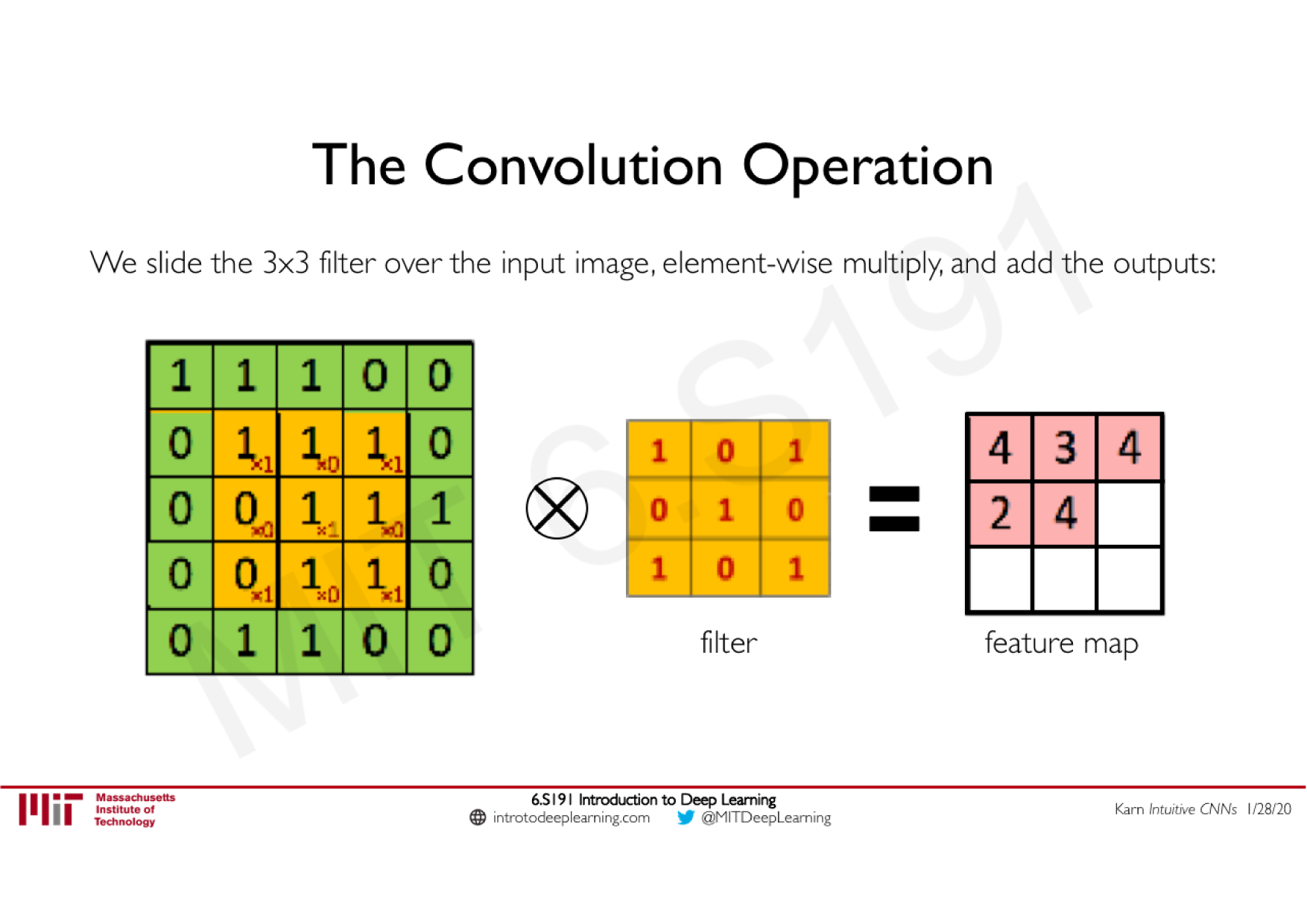
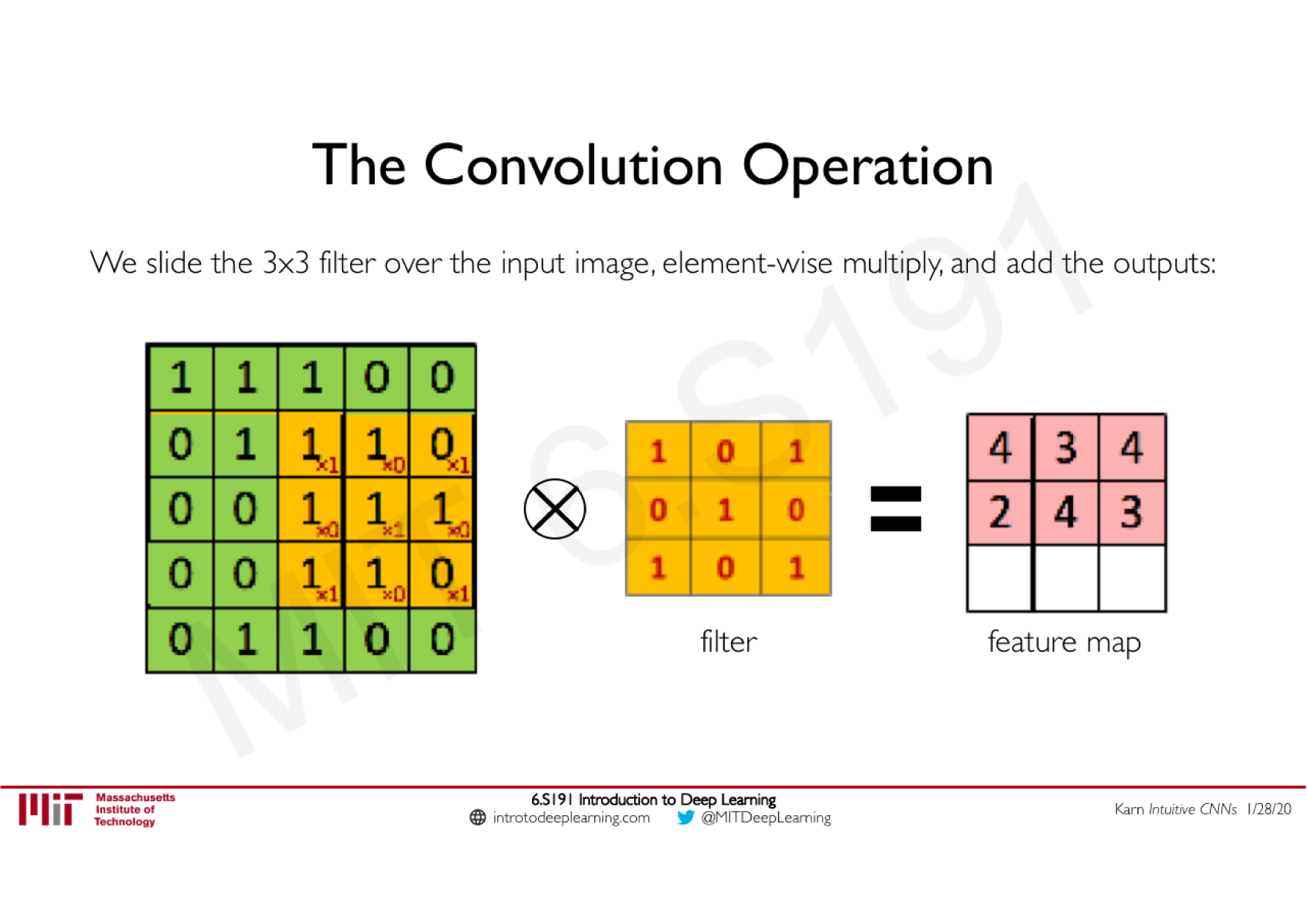
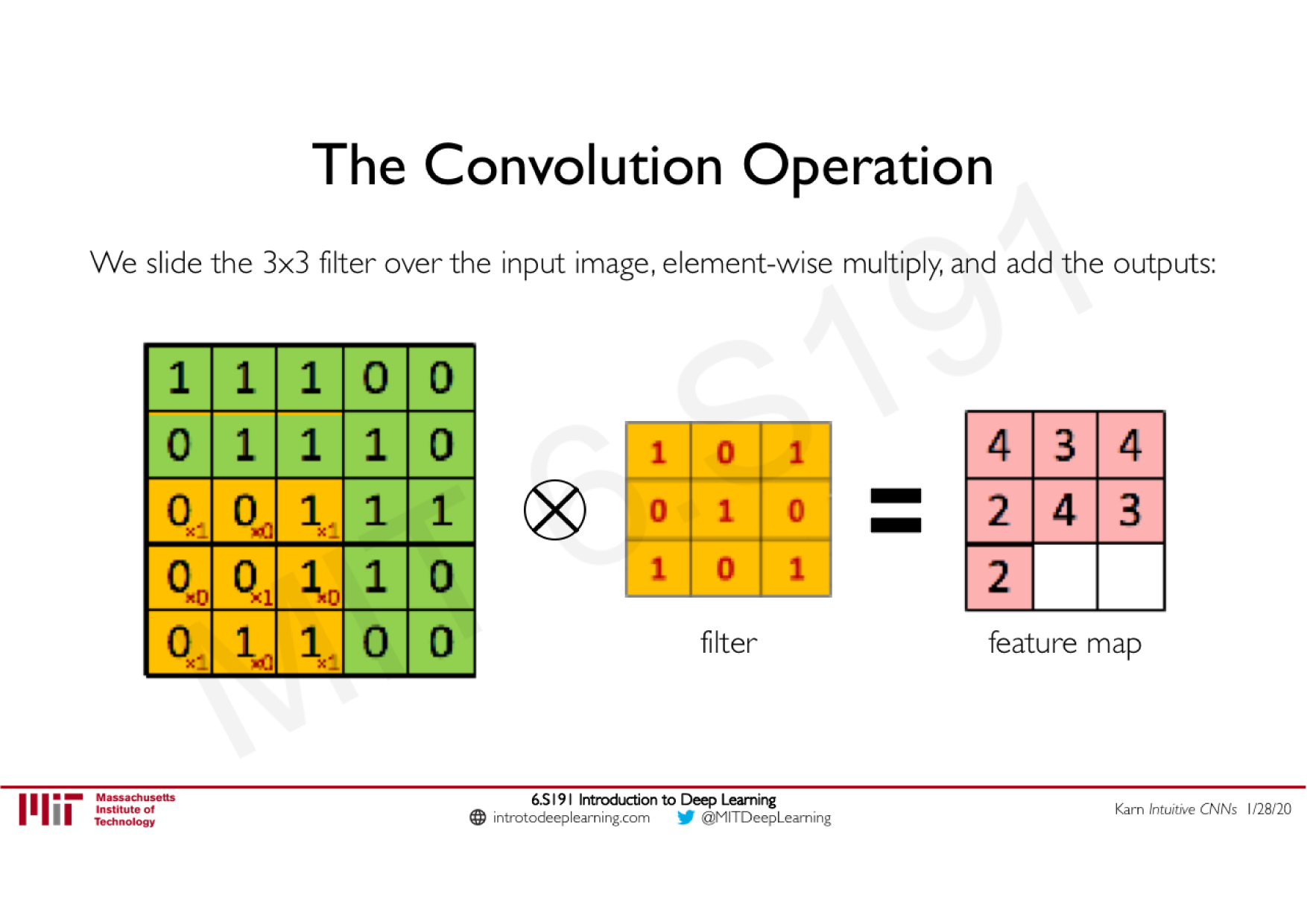
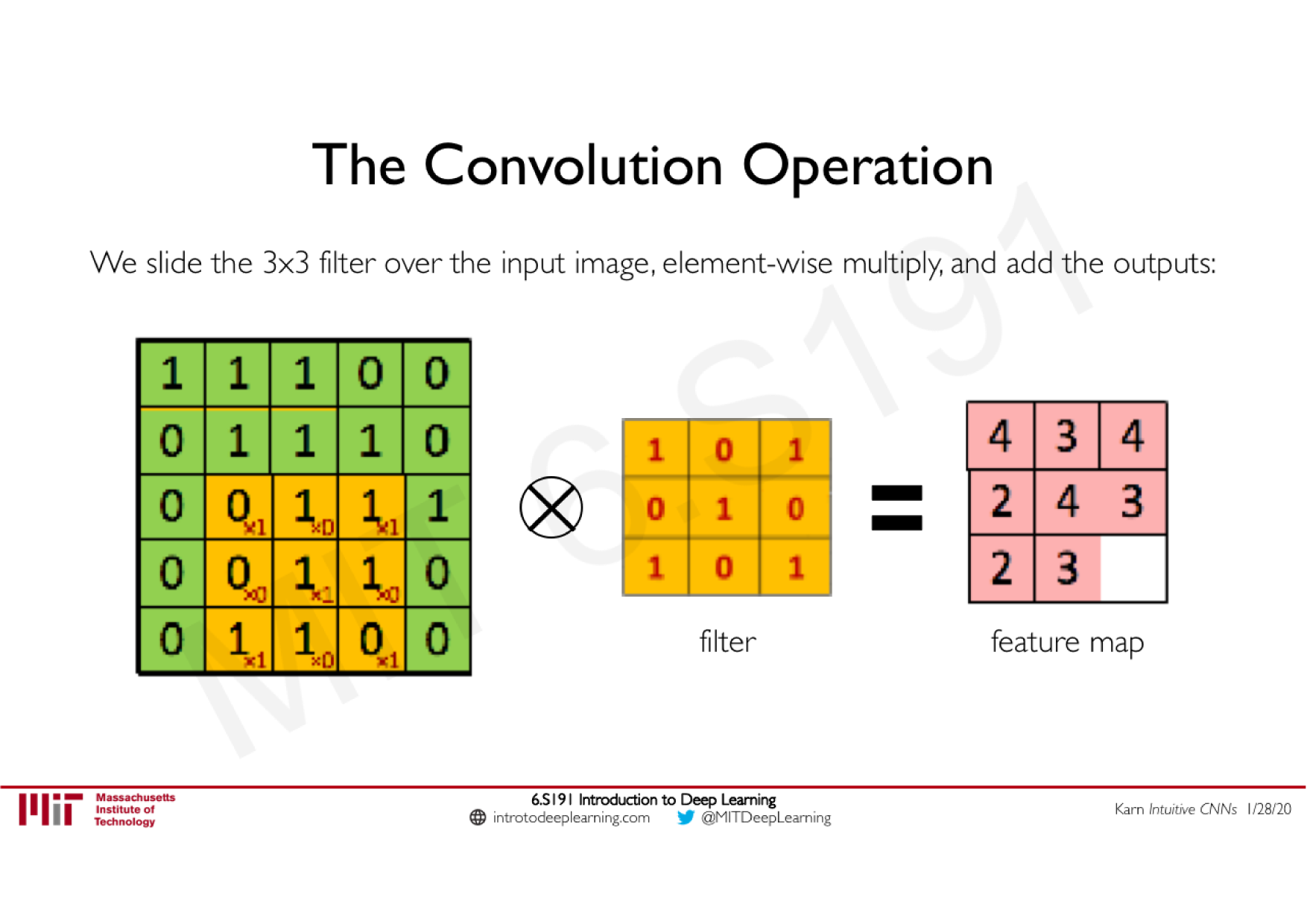
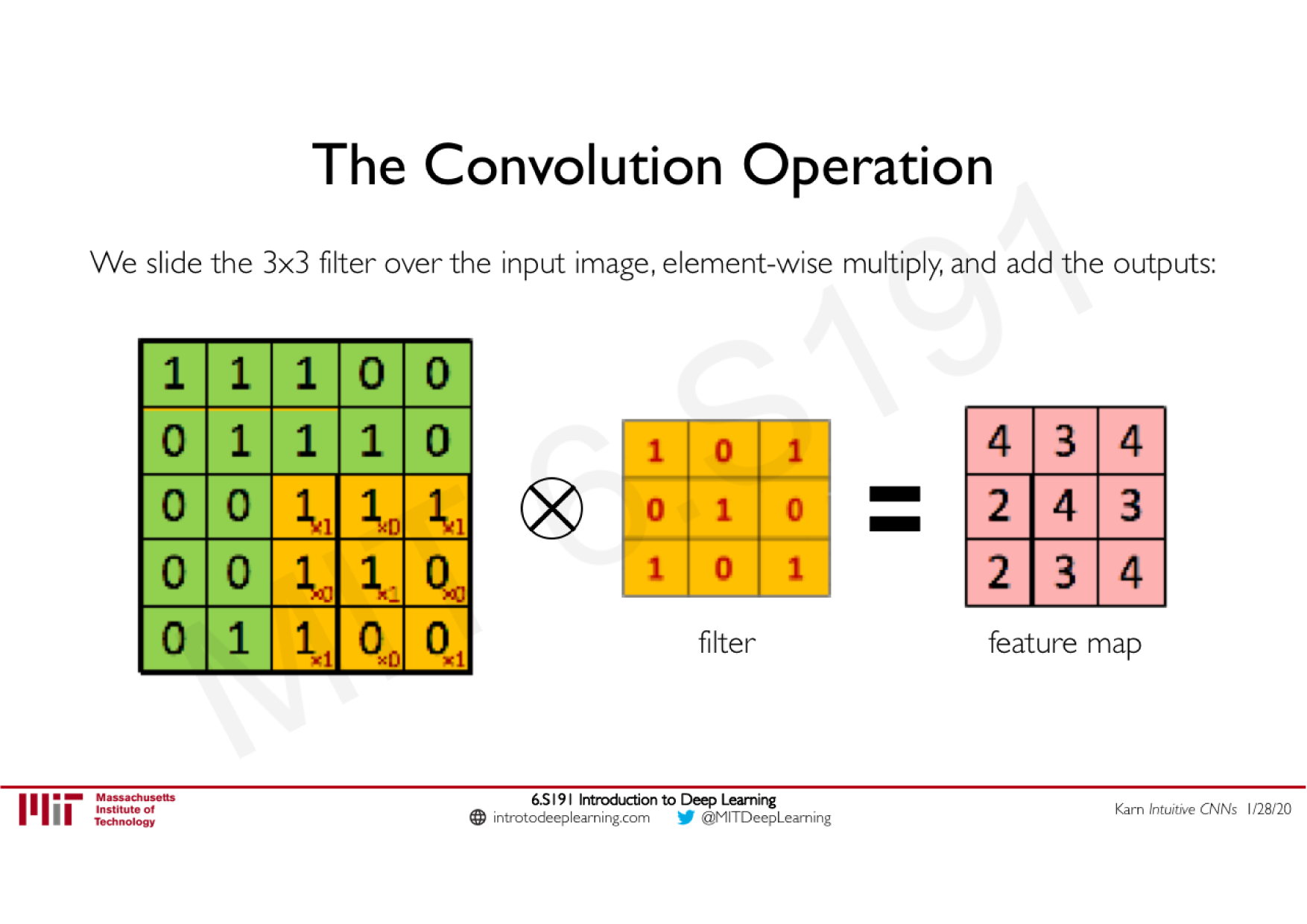
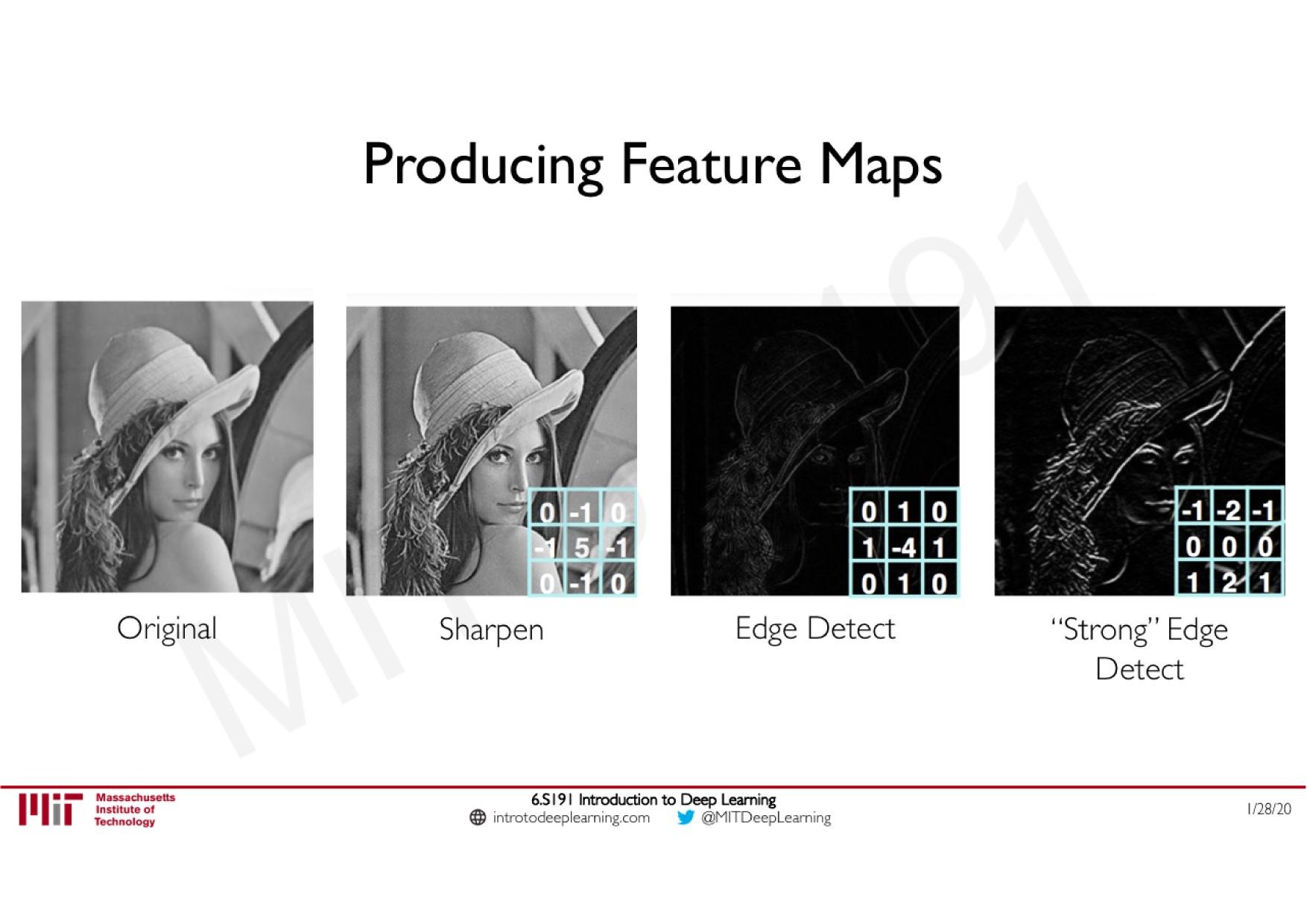
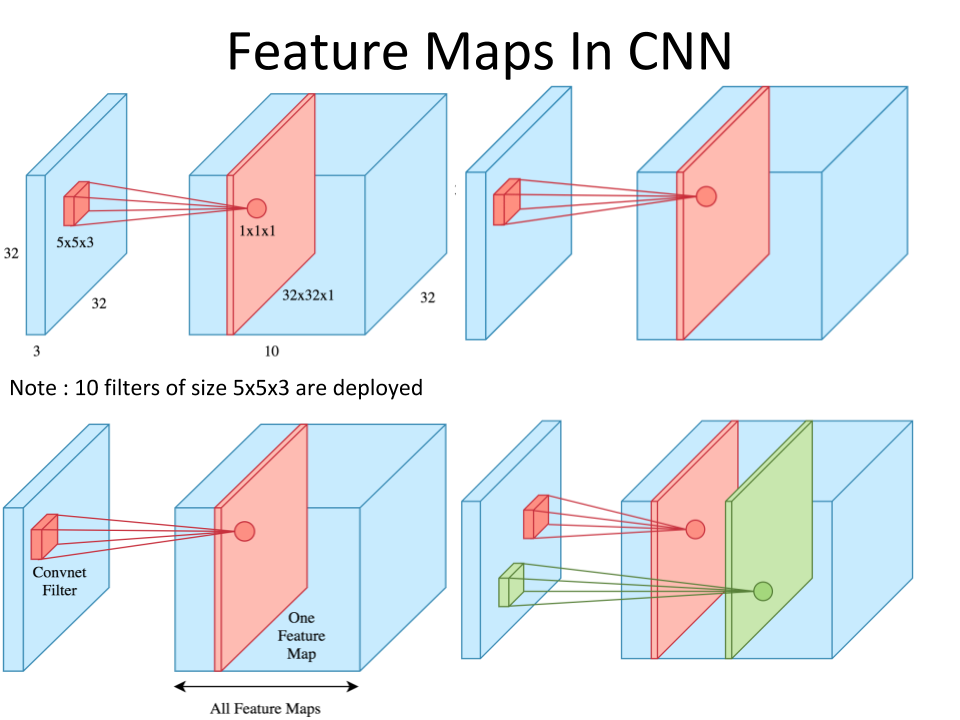
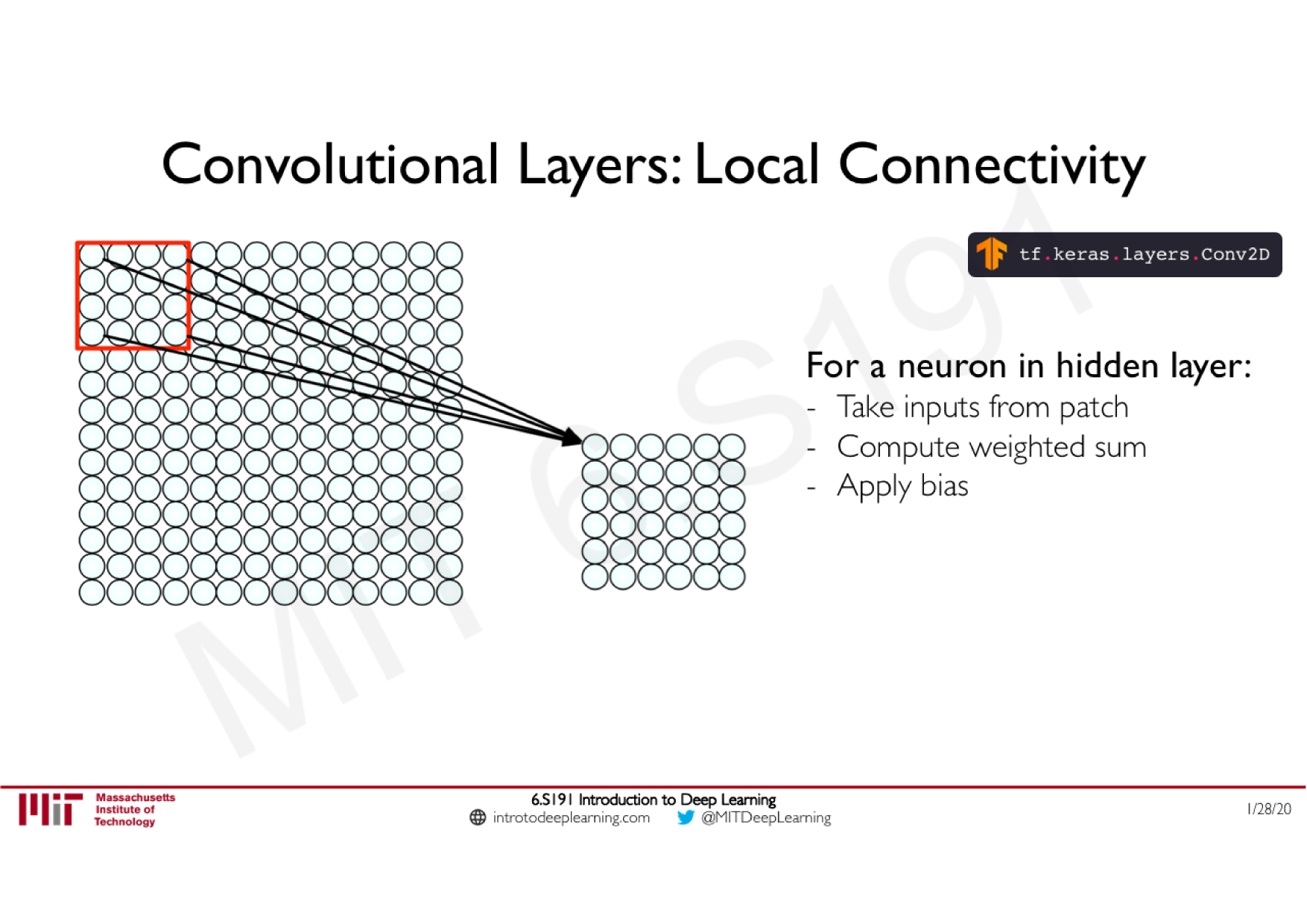
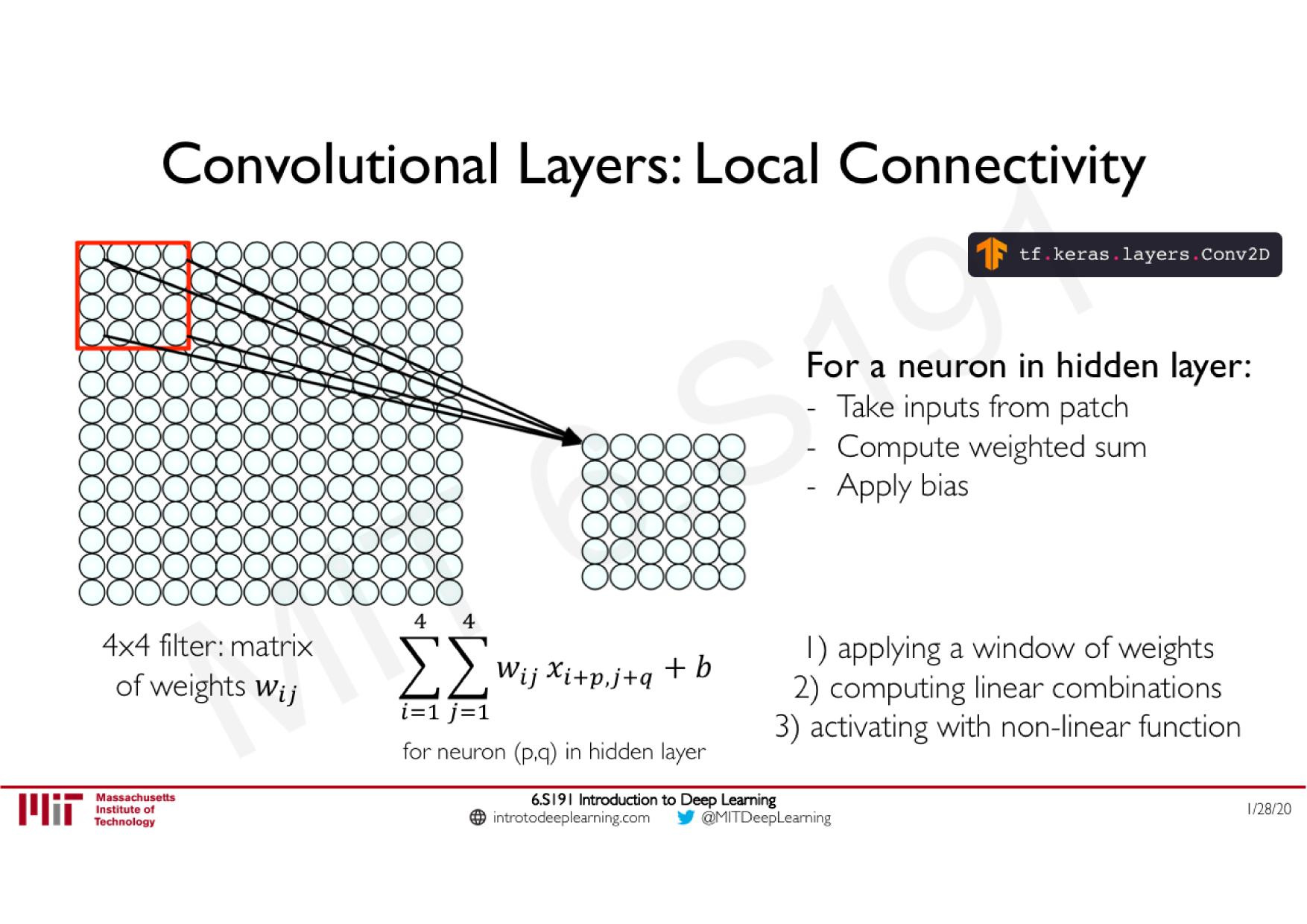
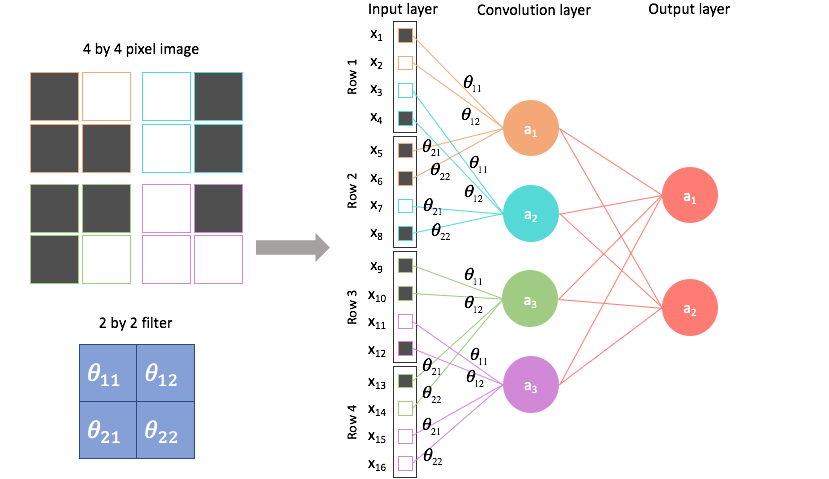
... en apprenant des features locales
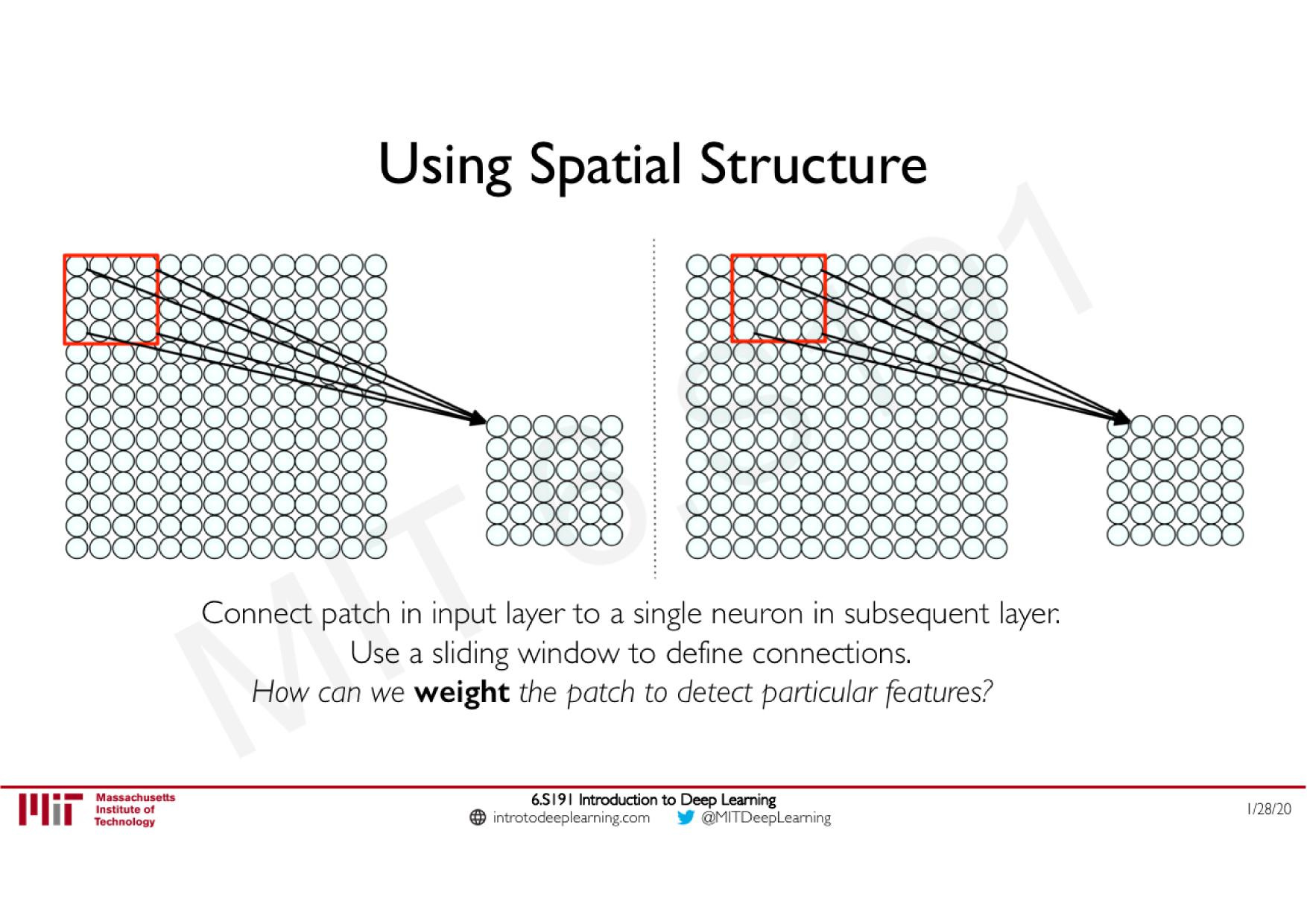
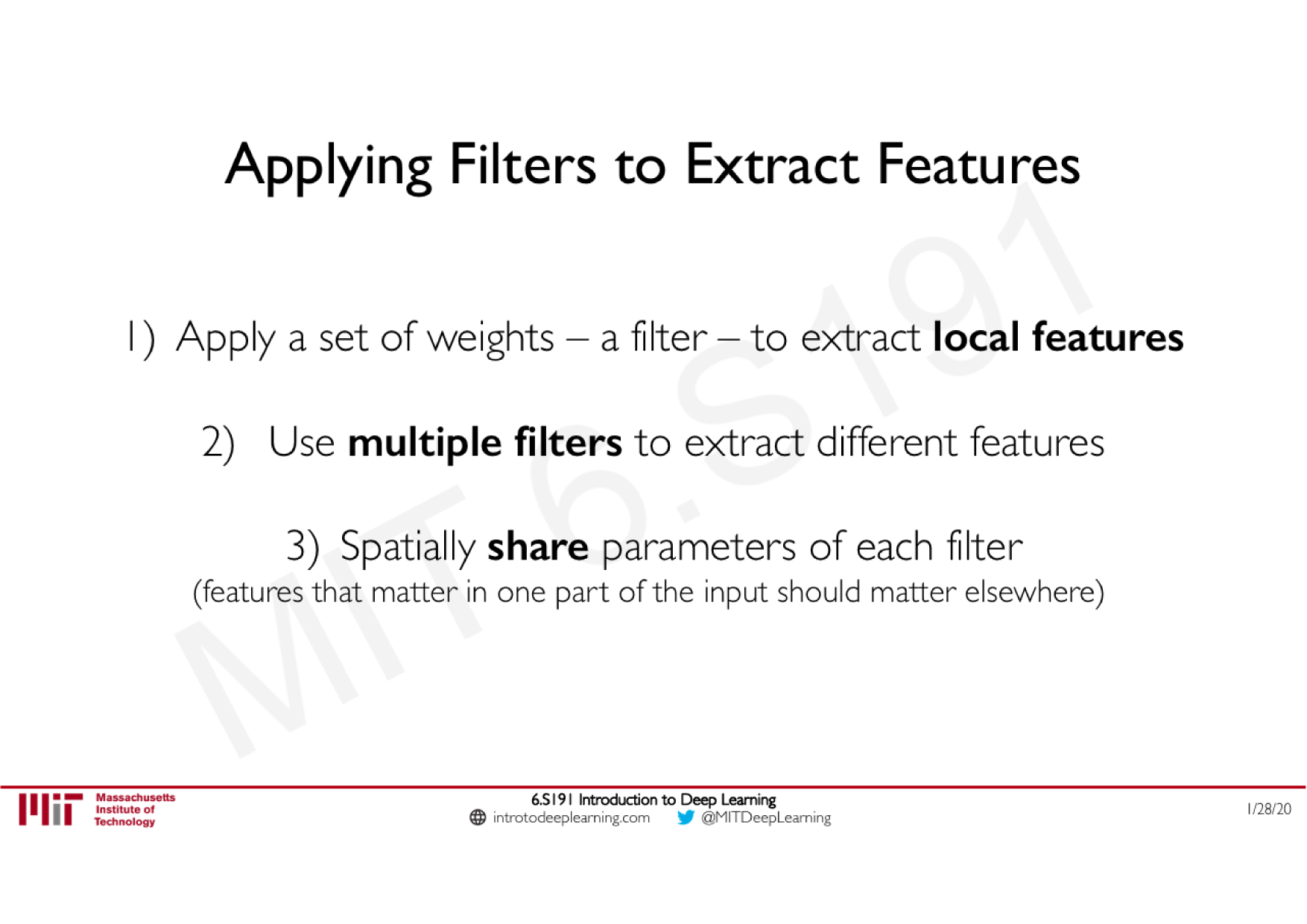
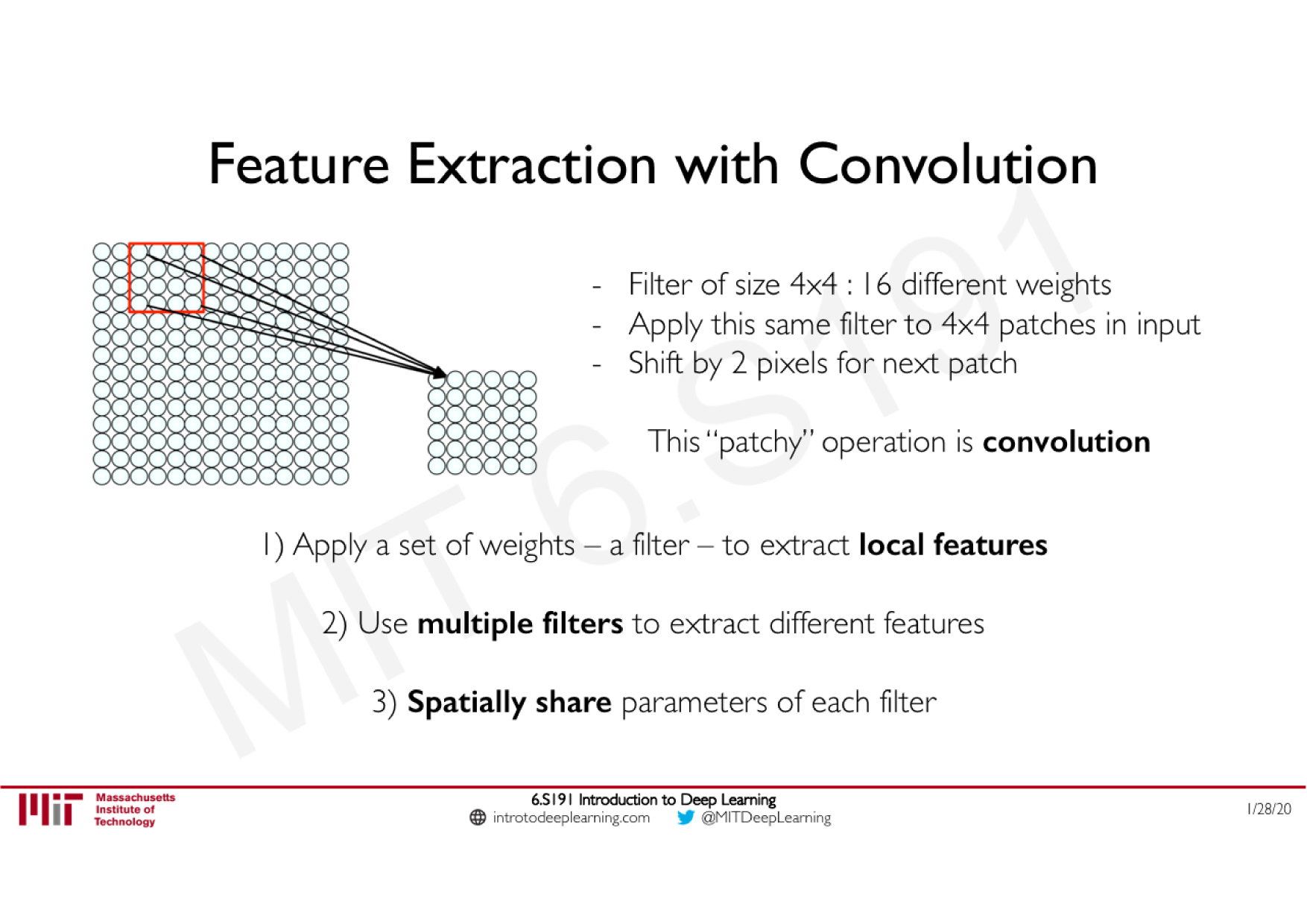
extraction de features par convolution
Le padding
pas de padding
padding de 1
full padding
Permet de "scanner" complètement les pixels du bord
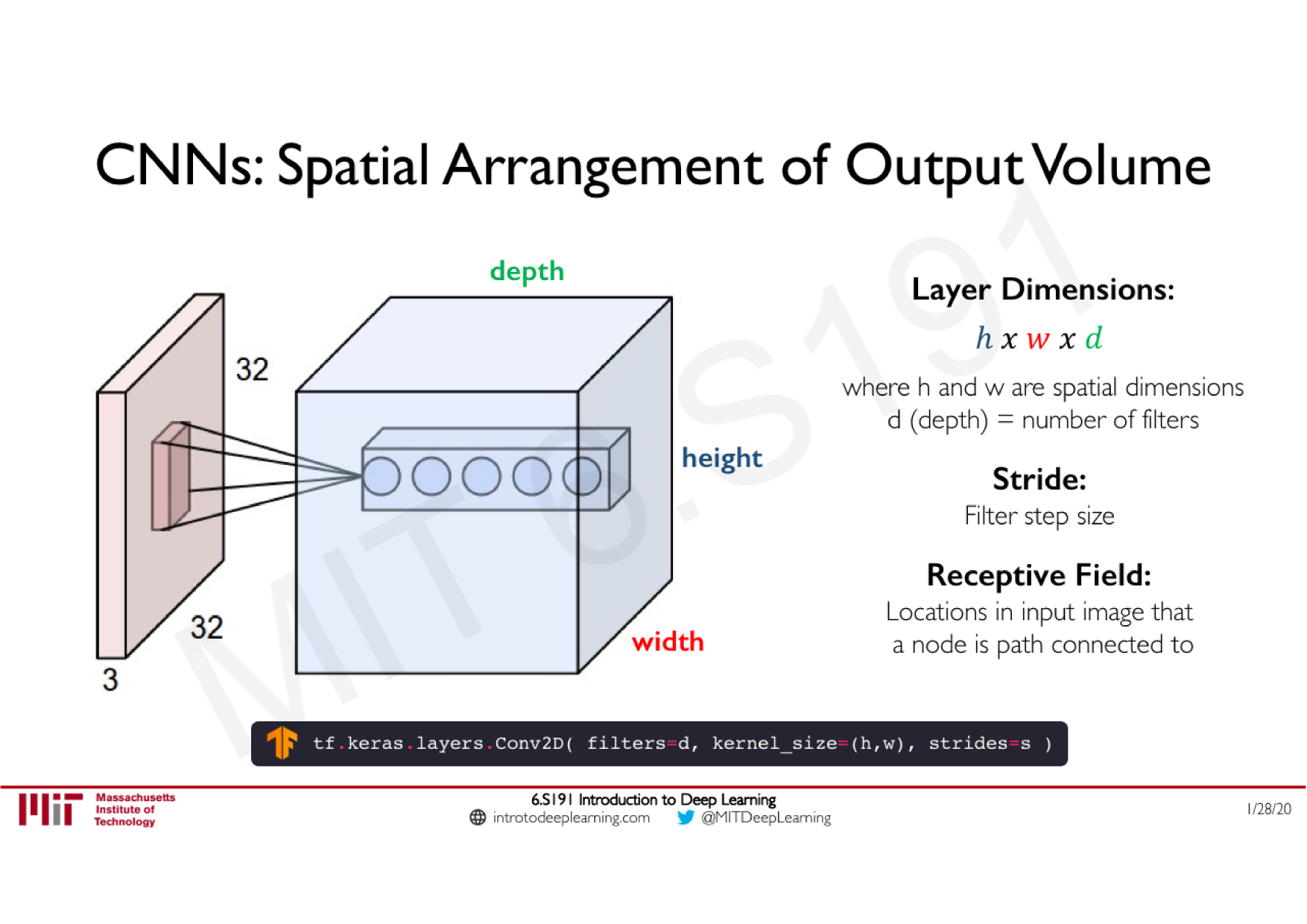
Les strides
padding de 1 stride de 2
Le pas avec lequel s'appliquent les filtres
padding de 1 stride de 1
Avec des images en couleurs
Le réseau apprend un filtre par canal de couleur
Exemples avec des images codées en RGB
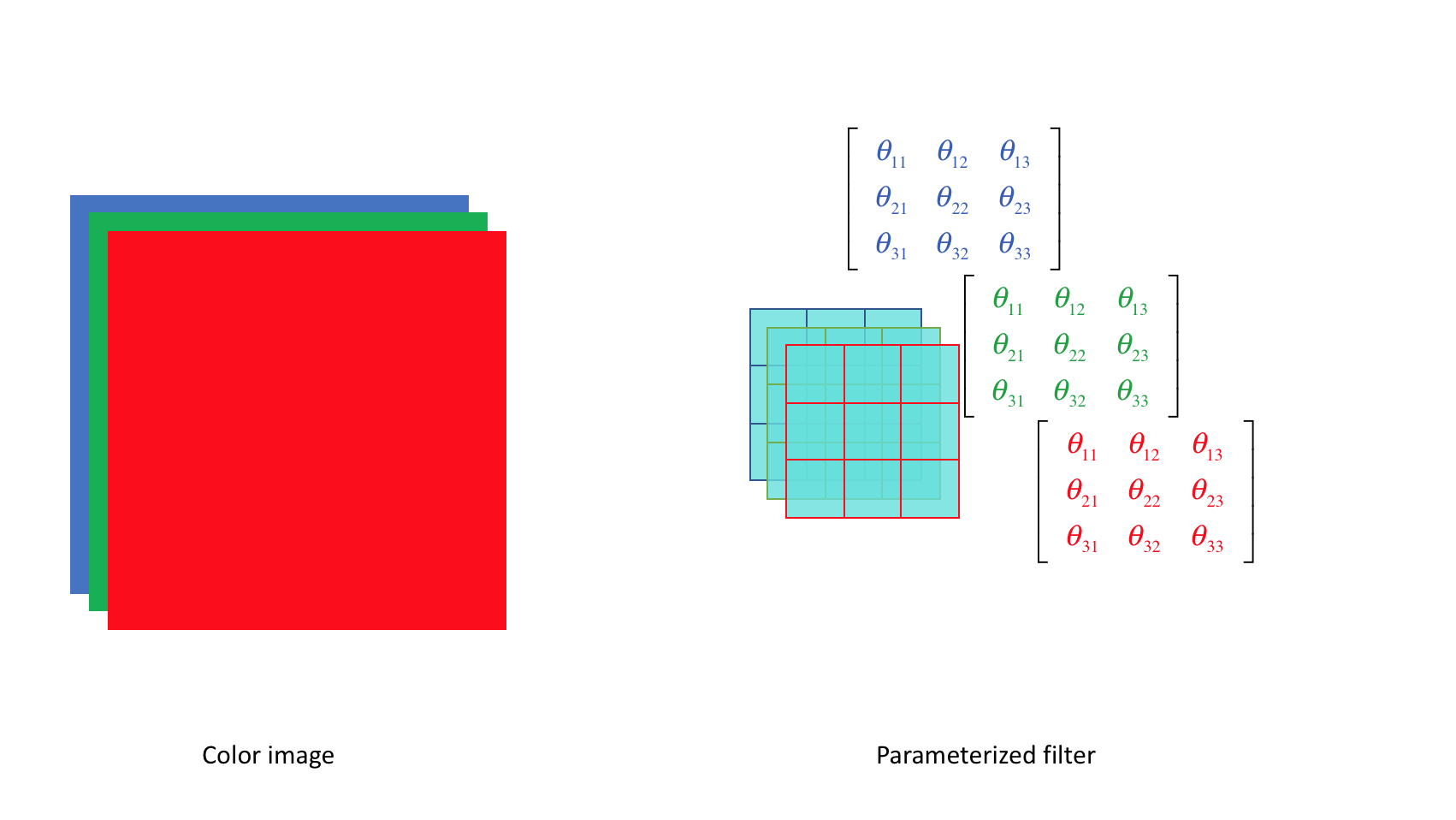
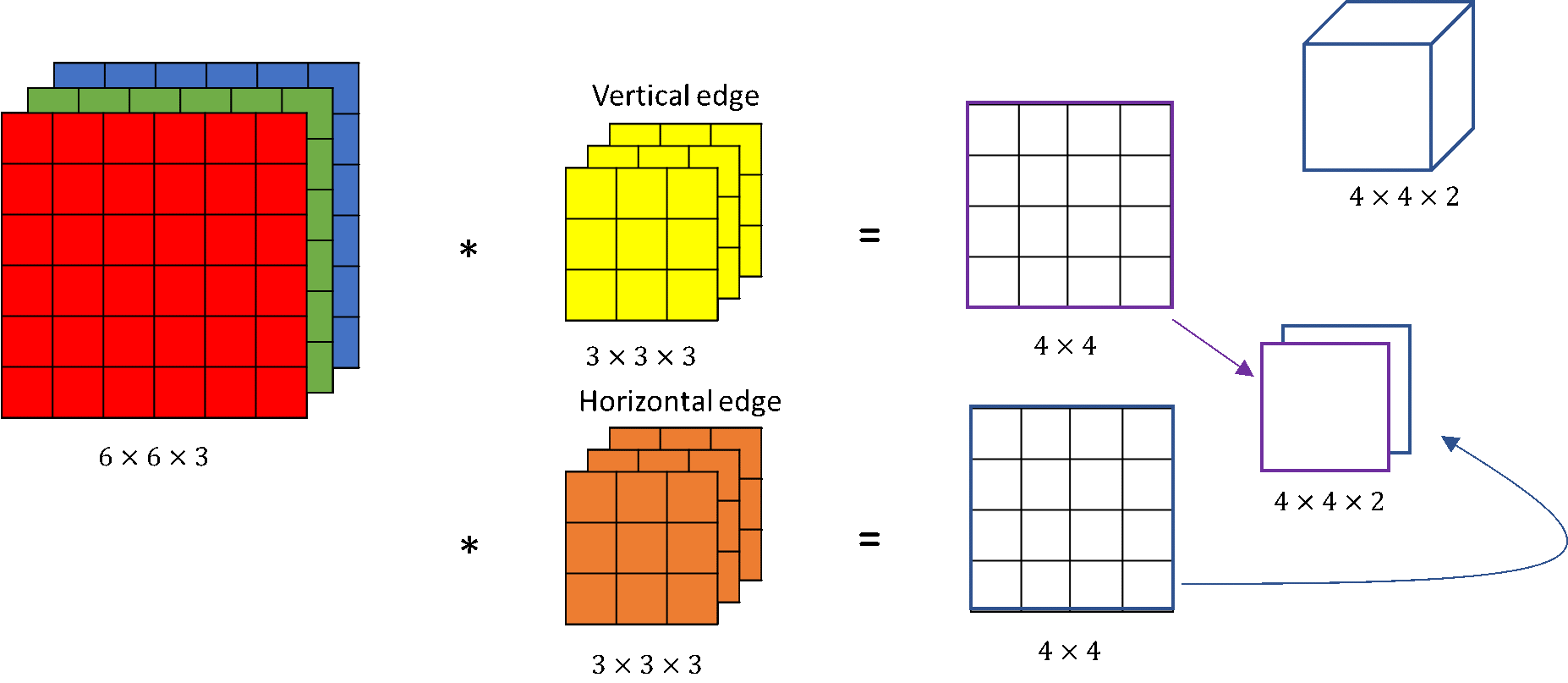
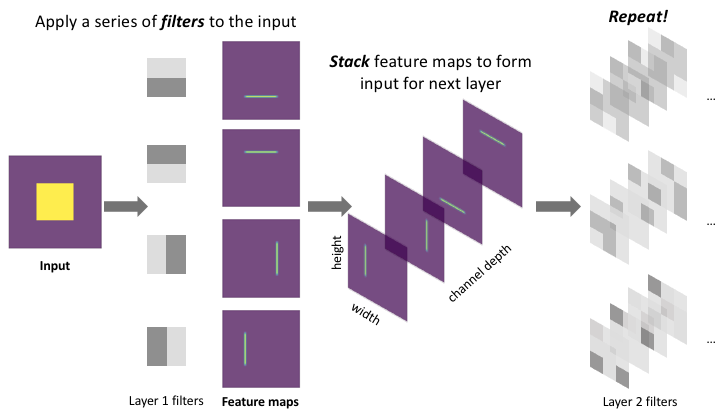
Avec des images en couleurs
On peut combiner plusieurs groupes de filtres par couche
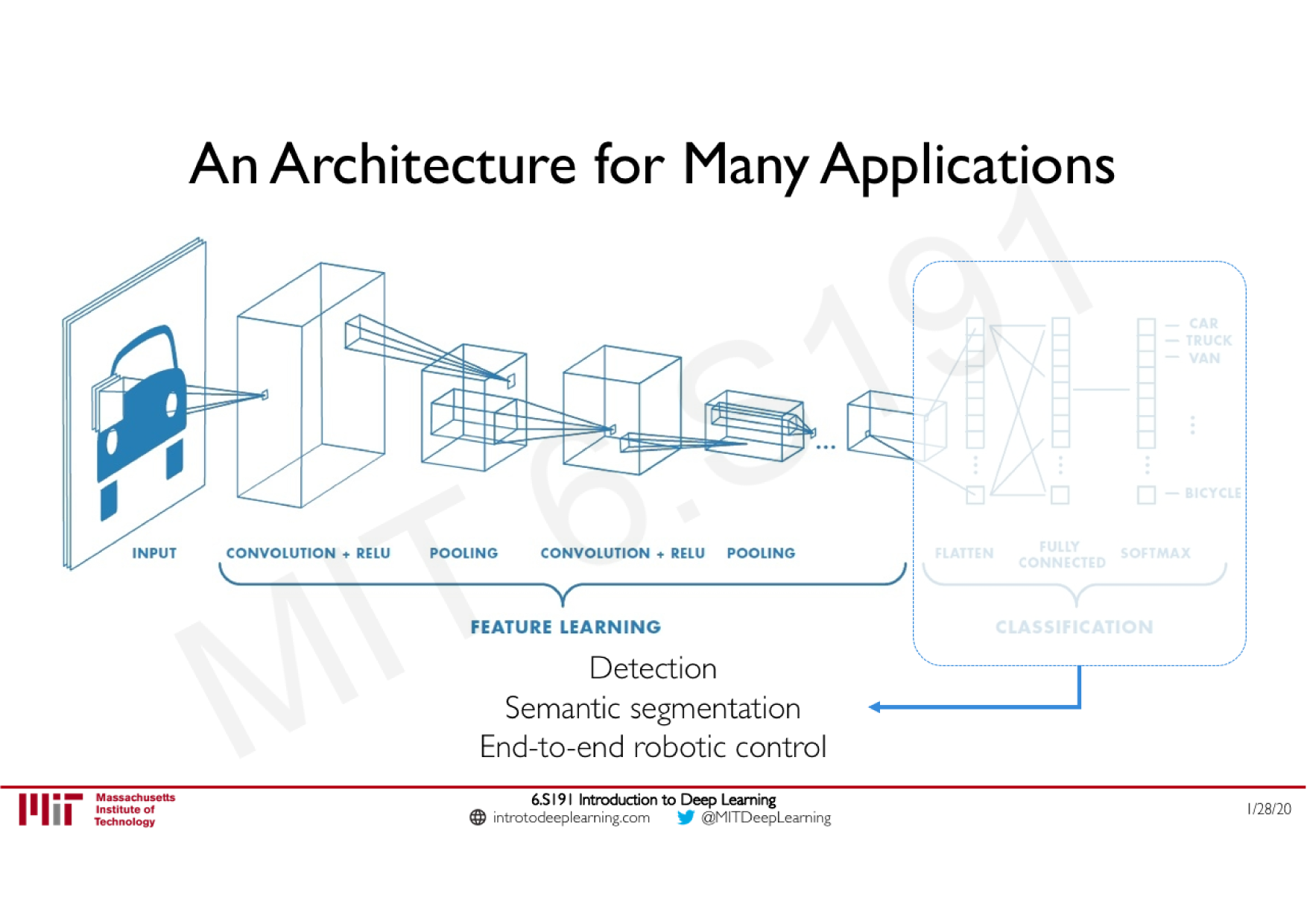
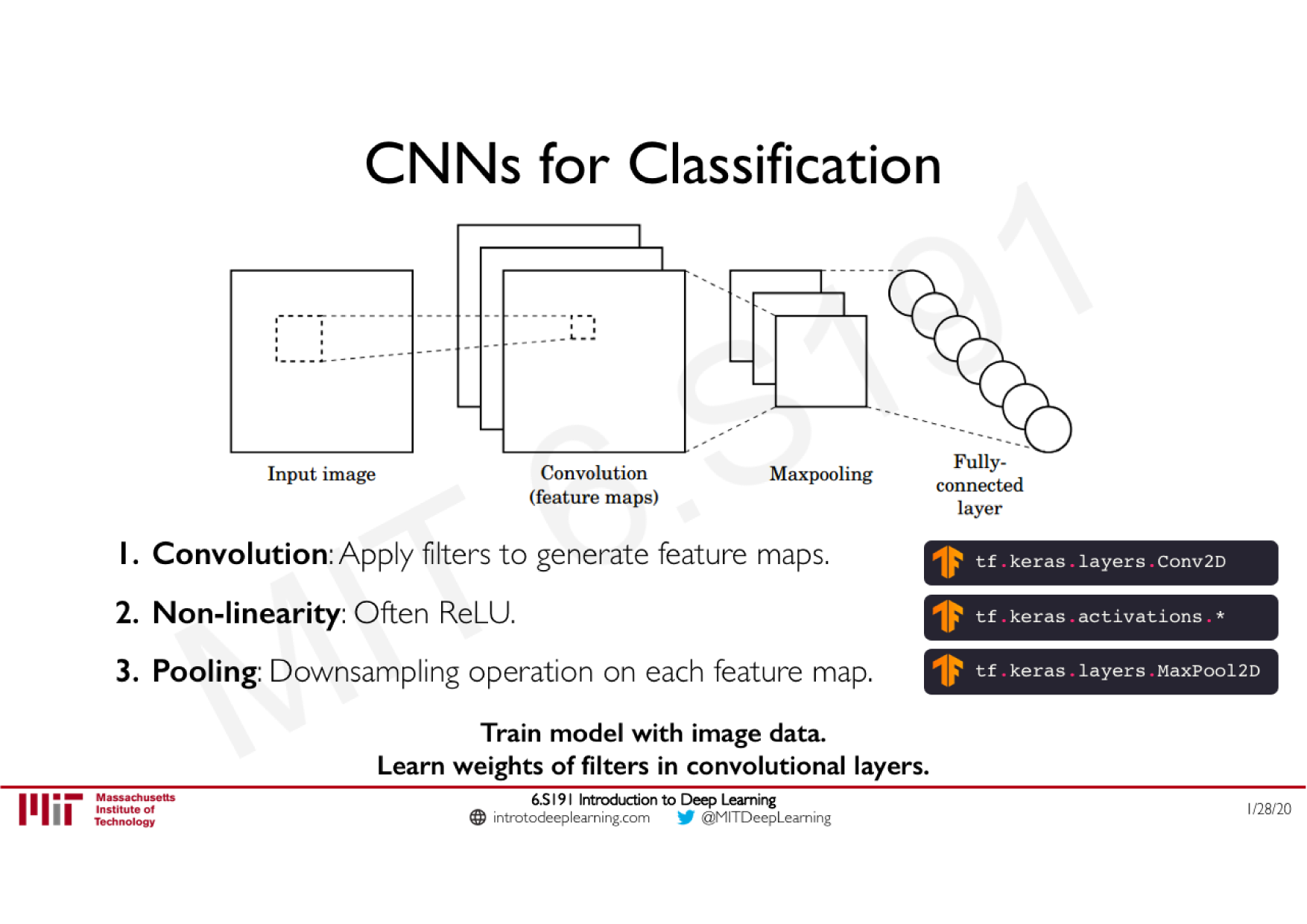
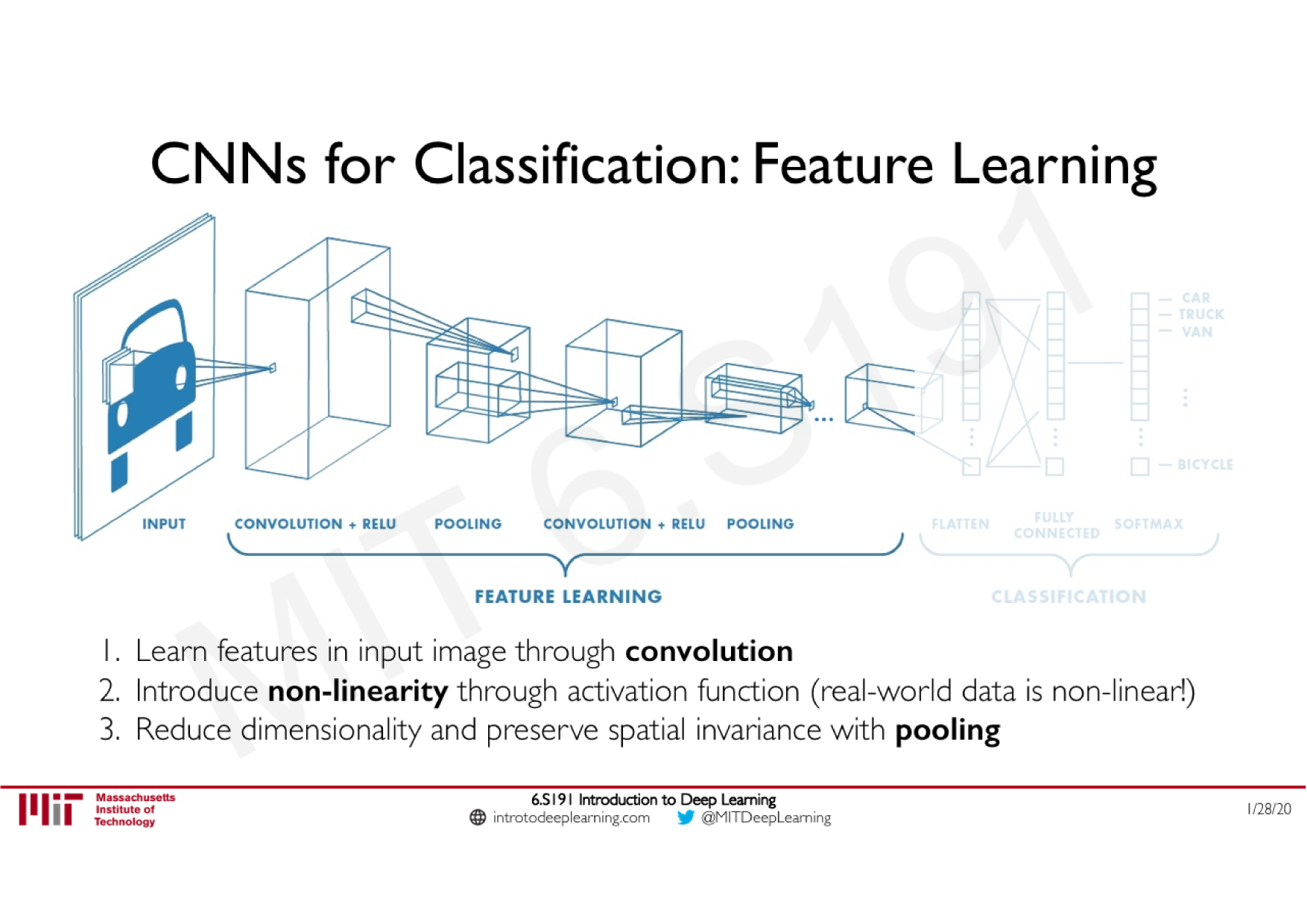
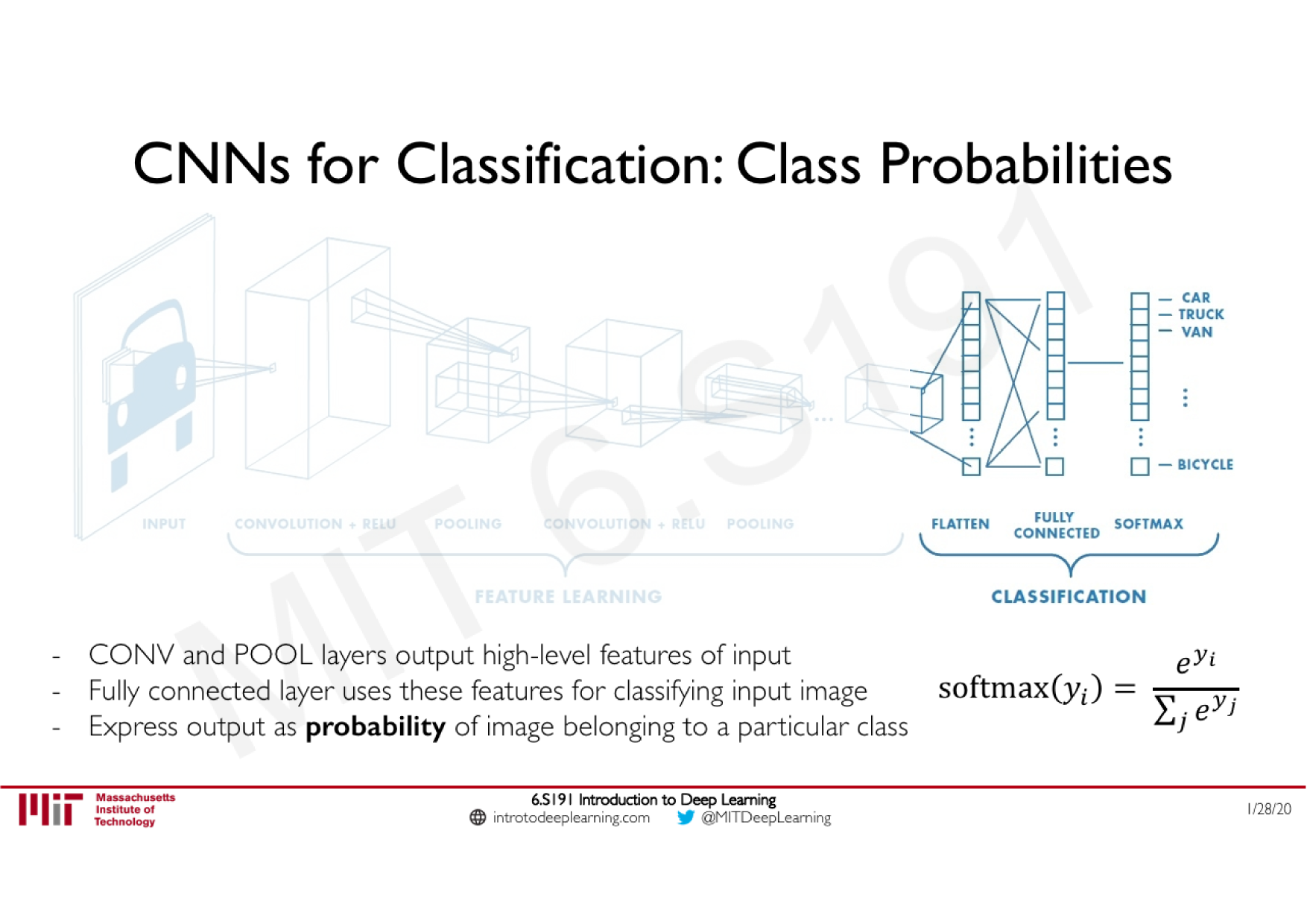
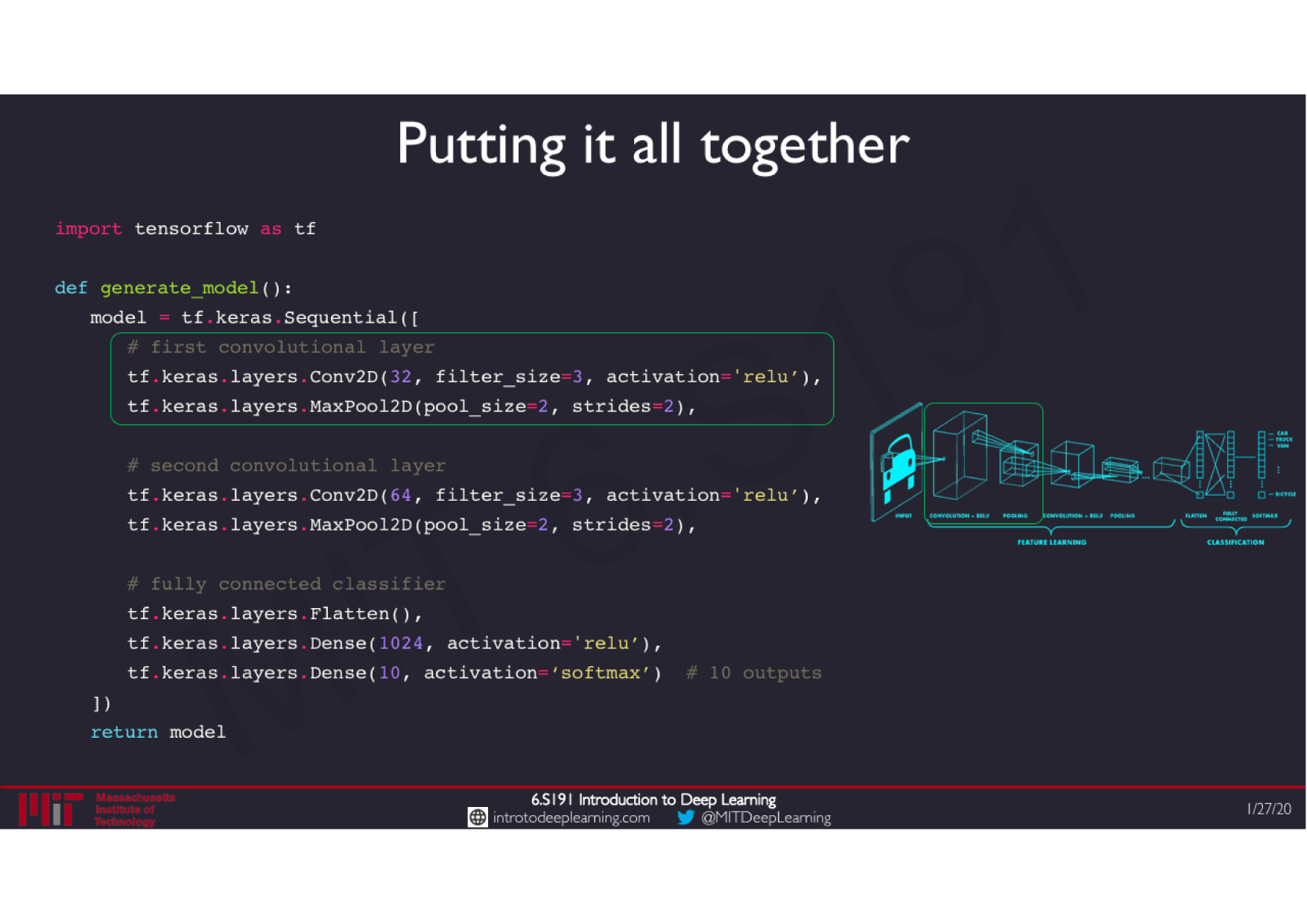
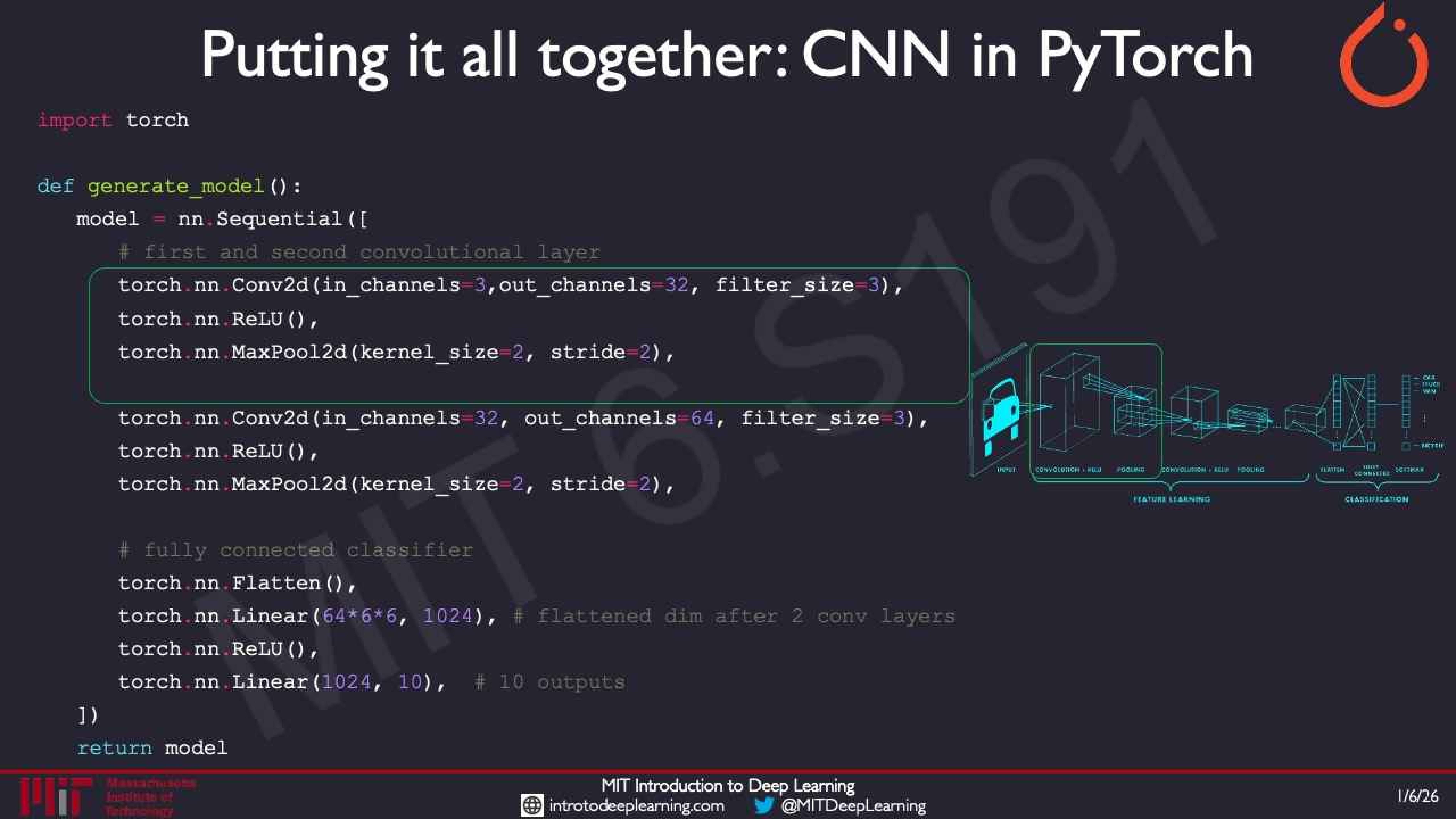
Le réseau convolutif
Convolutionnal Neural Network (CNN)
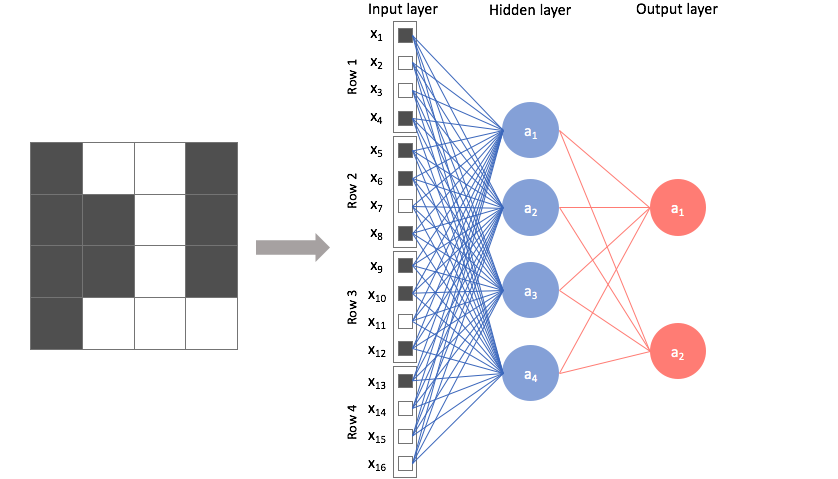
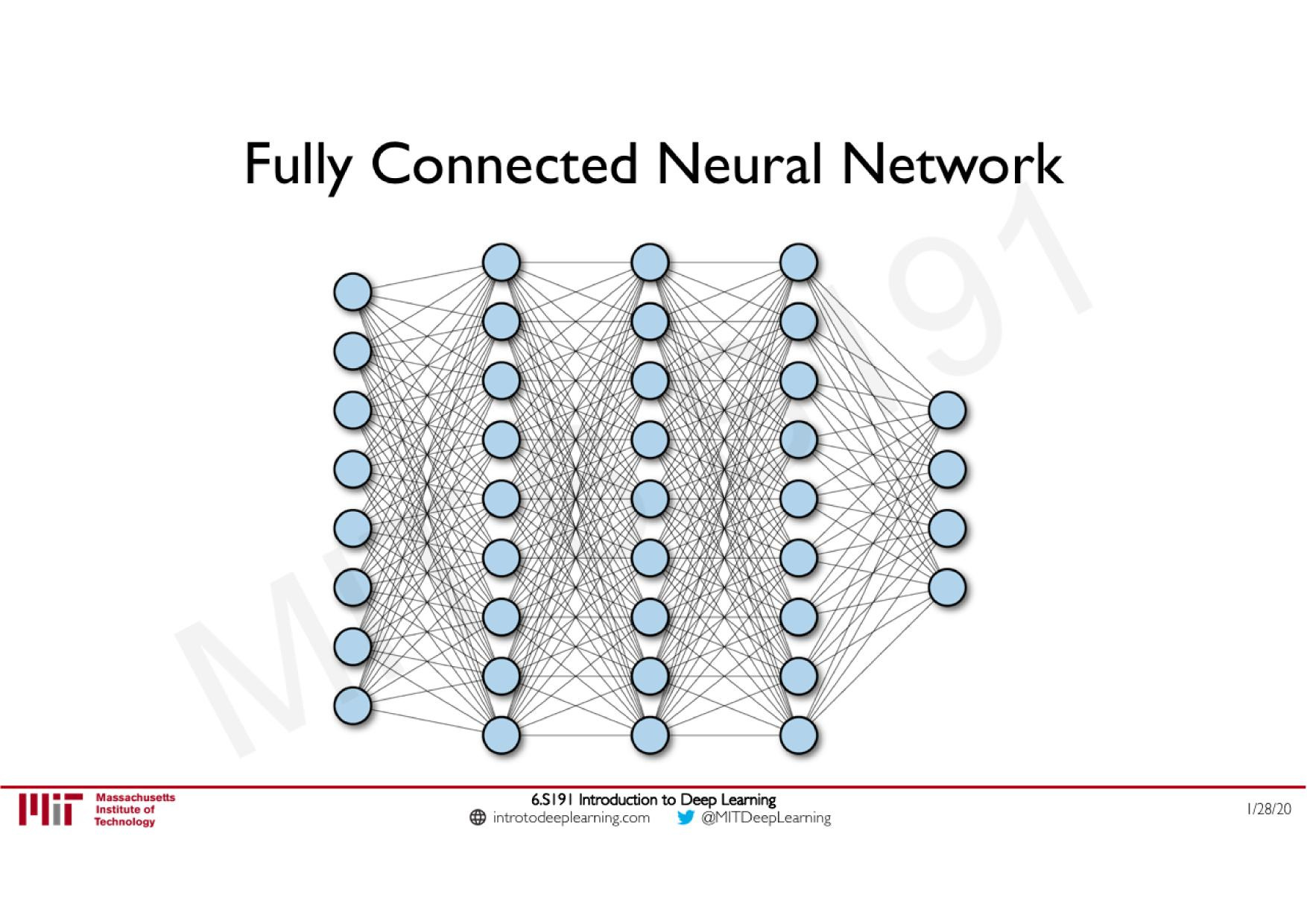
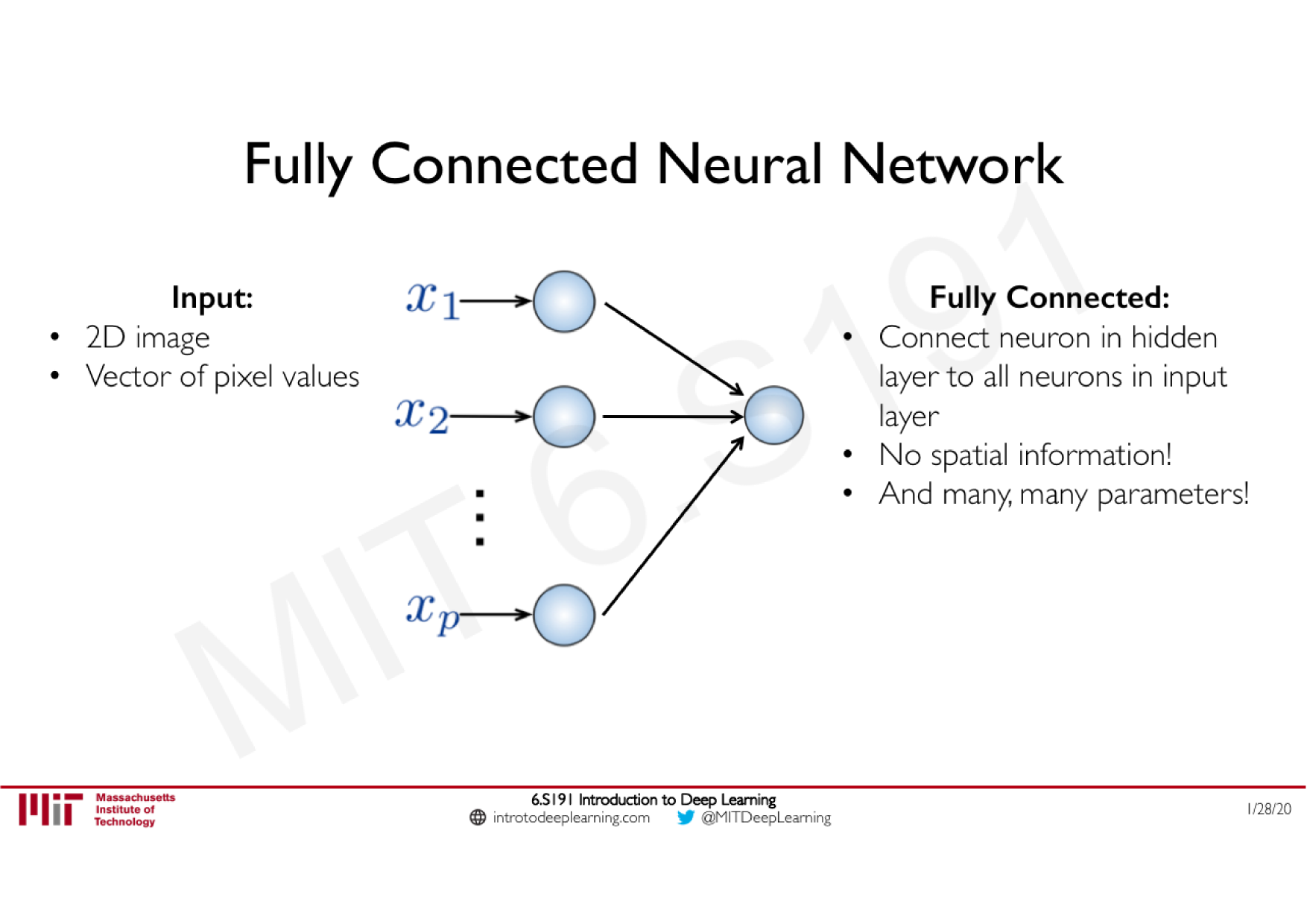
Du perceptron au CNN
Les "briques" d'un CNN
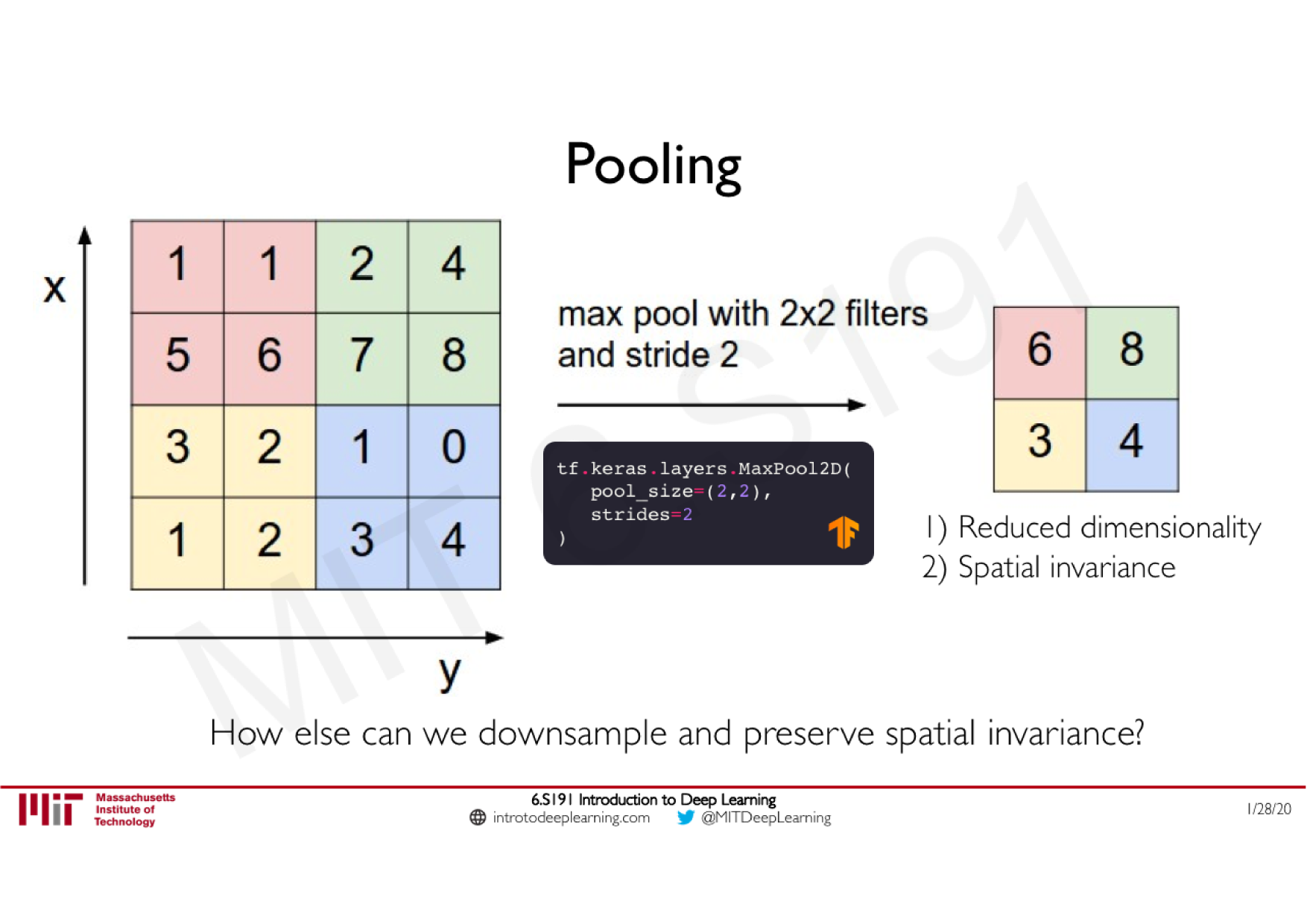
Le pooling
Intérêt : faire un sous échantillonnage spatial
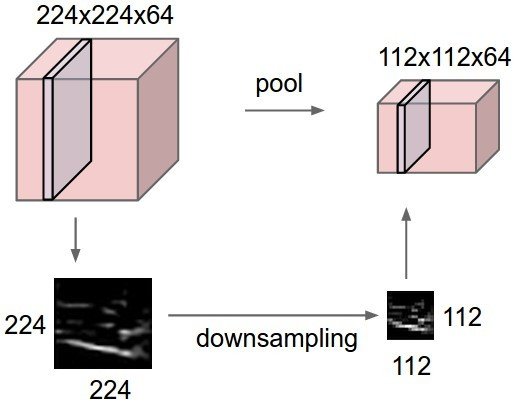
Le pooling
Mais ces couches tendent a être de moins en moins utilisées !
Différents types de pooling possibles:
max pooling
average pooling
region of interest pooling
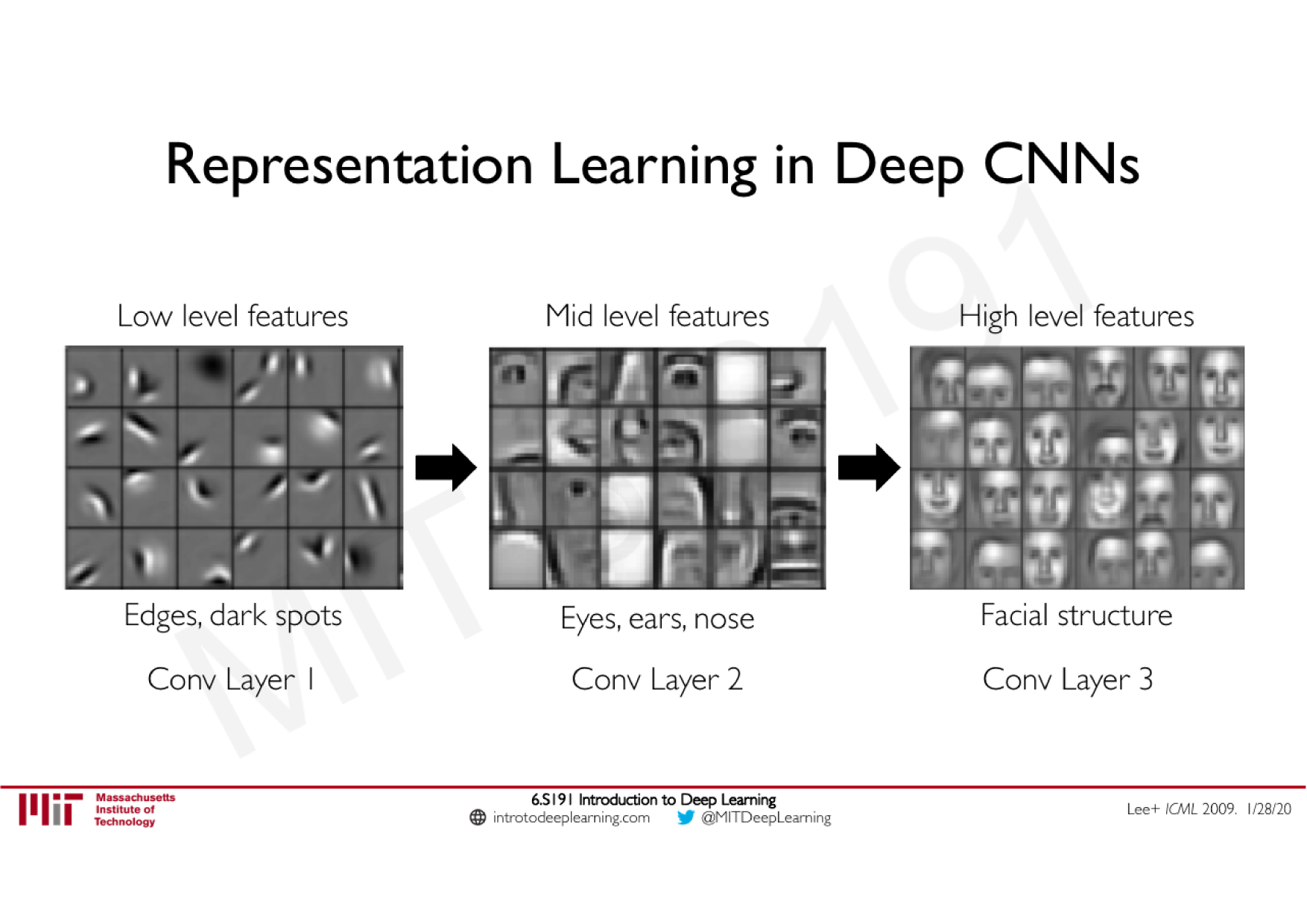
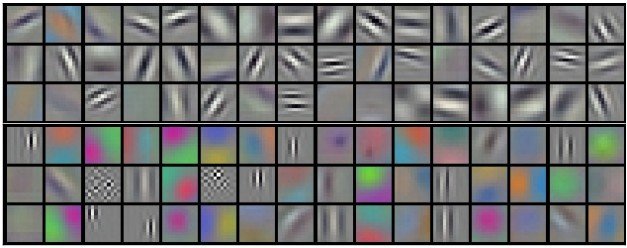
A l'intérieur d'un CNN
Exemple de 96 filtres appris par des premières couches d'un CNN
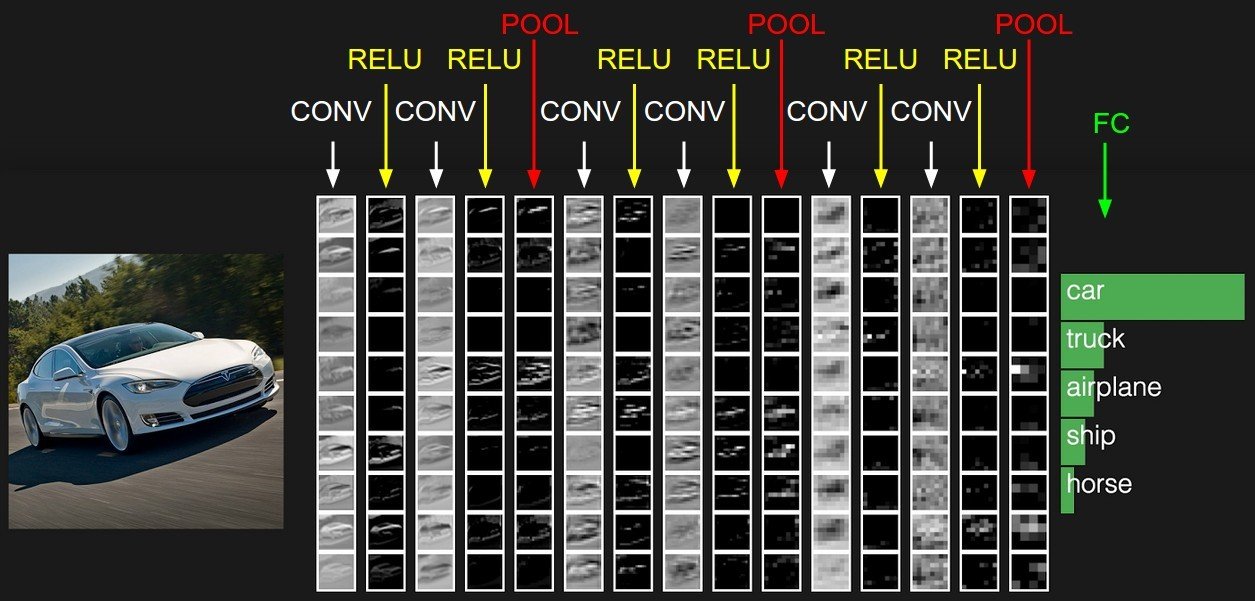
A l'intérieur d'un CNN
Visualiser couches cachées
D'autres types de couches
La "couche" batch normalisation
Idée : normaliser les données de chaque mini-batch
...
...
Accélère le calcul
Réduit le problème d'évanescence du gradient
Régularise les données
Apprentissage par transfert
Quelques architectures célèbres
...
90
2012
2013
2015
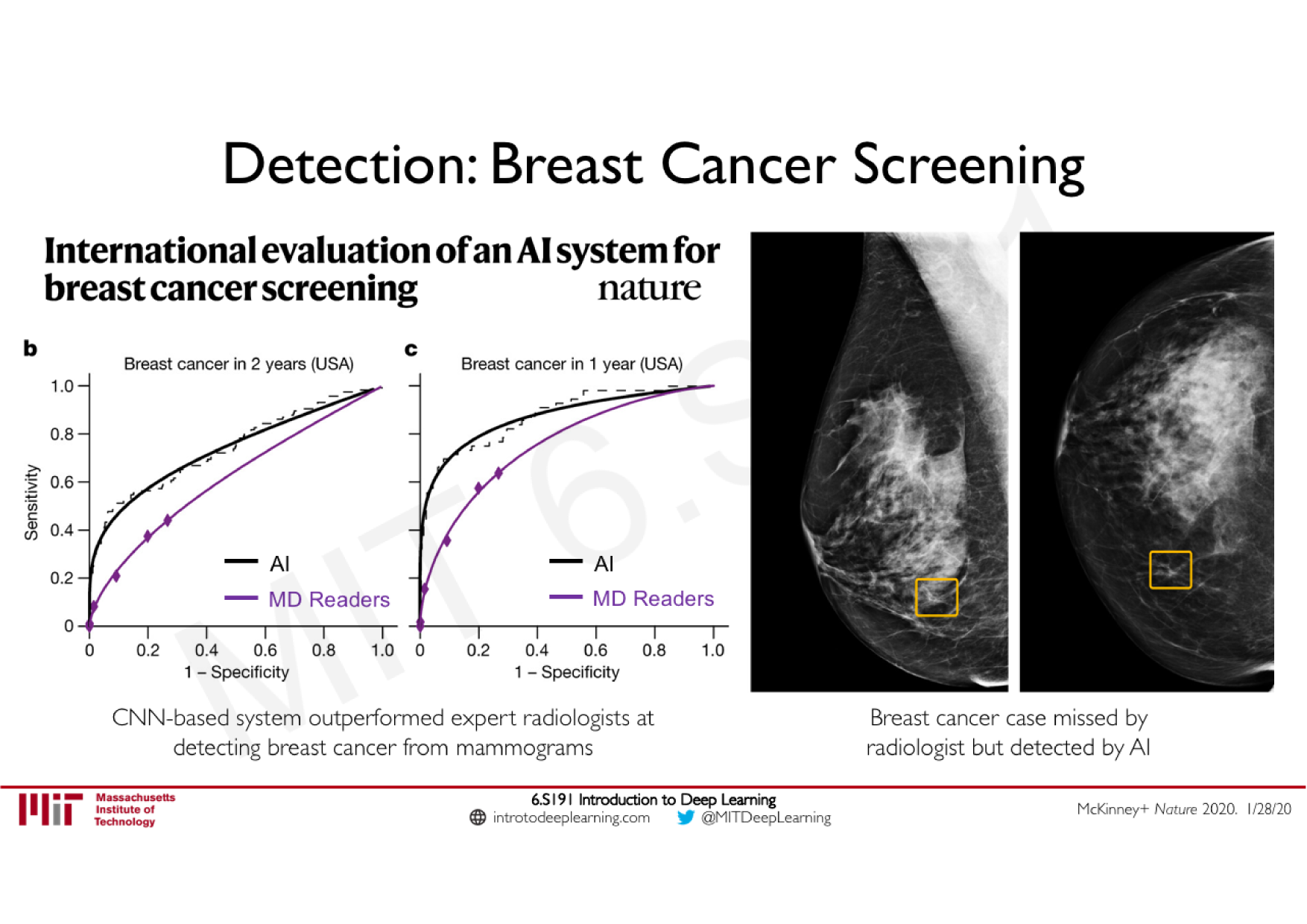
De nombreuses applications