An exponential-free structure preserving integrator for stochastic Lie–Poisson systems

Erik Jansson
Joint work with:
- Annika Lang (Chalmers/University of Gothenburg)
- Sagy Ephrati (Chalmers/University of Gothenburg)
- Erwin Luesink (University of Amsterdam )
Made possible by:
-
Klas Modin and Milo Viviani. Lie–Poisson methods for isospectral flows. Foundations of Computational
Mathematics, 20:889–921, 2020. - Grigori N. Milstein and Michael V. Tretyakov. Stochastic Numerics for Mathematical Physics. Springer
Berlin Heidelberg, 2004. - Charles-Edouard Bréhier, David Cohen, and Tobias Jahnke. Splitting integrators for stochastic Lie–
Poisson systems. Mathematics of Computation, 92(343):2167–2216, 2023.
Talk based on:
asdasdasd


arxiv:2408.16701

Overview
- Which systems?
- How to make them stochastic?
- The need for structure-preserving integration
- How to derive the integrator?
- How to prove that it does what it should?
Examples of systems
Stochastic rigid body
Stochastic (sine) Euler equations
Stochastic point vortex dynamics
Lie-Poisson systems
Lie group \(G\) with algebra \(\mathfrak{g}\)
Hamiltonian \(H\colon \mathfrak{g}^* \to \mathbb R\)
Two ingredients
Lie-Poisson systems
Important geometric structure:
LP Systems evolve on coadjoint orbits
(symplectic manifolds that foliate space!)
+ Several preserved quantities, Hamiltonian, Casimirs etc.
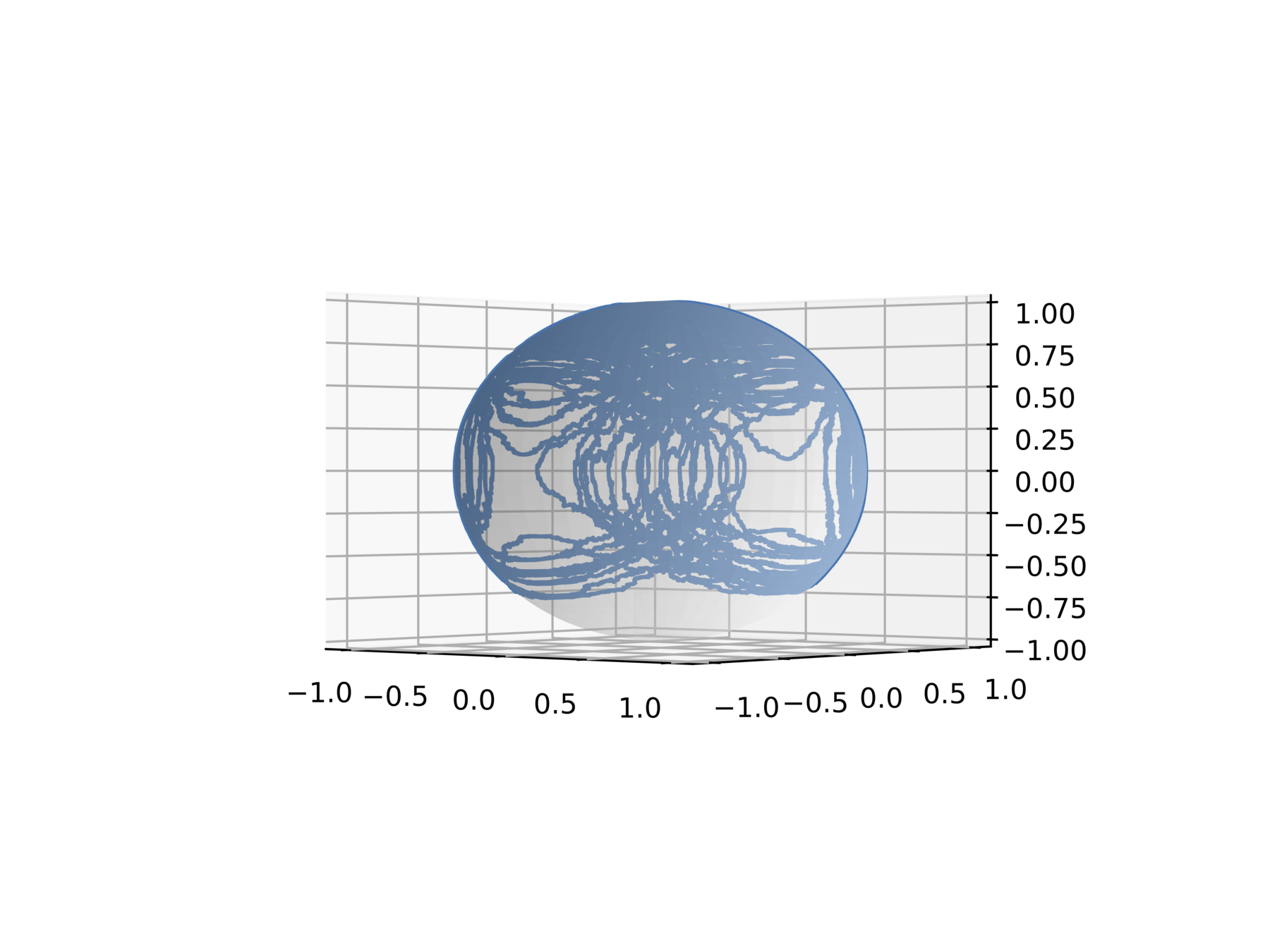
Coadjoint orbits
Dynamics on orbit
Lie-Poisson systems
+ Several preserved quantities, Hamiltonian, Casimirs etc.

rigid body, spin systems: concentric spheres
Important geometric structure:
LP Systems evolve on coadjoint orbits
(symplectic manifolds that foliate space!)
Lie-Poisson systems
\(G \subset \operatorname{GL}(n)\) is compact, simply connected and \(J\)-quadratic, i.e., \(A \in \mathfrak{g} \iff AJ + JA^* = 0 \)
Examples: \(\mathfrak{so}(N), \mathfrak{su}(N), \mathfrak{sp}(N)\).
In this setting, LP flow is isospectral:
Examples of LP systems
Classic example: rigid body (ODE)
- Algebra: \(\mathfrak{so}(3) \cong \mathbb R^3\)
- Bracket: \([v,w] = w \times v\)
- Hamiltonian: \(H(v) = v \cdot Iv\)
Examples of LP systems
Spin systems and point vortex dynamics:
- Algebra: \(\mathfrak{su}(2)^N \cong (\mathbb R^{3})^N\)
- Bracket: \([X_i,X_j] = X_i \times X_j \)
- Hamiltonian: \(H(X_1, \ldots, X_n) {=} -\frac{1}{4\pi} \sum_{j=1}^n \sum_{i=1}^{j-1} \Gamma_{ij} \log\left(1{-} \frac{\operatorname{Tr}(X_i^* X_j)}{\|X_i \|^2 \|X_j \|^2}\right) \)
Examples of LP systems
Spherical Zeitlin-Euler equations (Sine-Euler)
- Algebra: Skew-Hermitian matrices \(\mathfrak{su}(N)\)
- Bracket: Matrix commutator \([\cdot,\cdot]\)
- Hamiltonian: \(H(W) = -\frac{1}{2}\operatorname{Tr}( (\Delta_N^{-1}W)^*W)\)
Introducing stochasticisty
How to add noise to equations?
- \(M\) independent scalar Brownian motions \(W^1, \ldots, W^M\)
- \(M\) noise Hamiltonians \(H_k\colon\mathfrak{g}^*\to \R\)
Introducing stochasticisty
Why Strato?
Why these coefficients?
We need a chain rule
Same bracket-type coefficient: same geometric structure
Stochastic LP Systems evolve on coadjoint orbits and have Casimirs!
Introducing stochasticisty
Stochastic LP Systems evolve on coadjoint orbits and have Casimirs!
Coadjoint orbits
With transport noise
With non-transport noise
Geometric structure is needed
What to assume to prove the existence of solutions?
E.g. Lipschitz is not realistic to assume
But! Some smoothness is sufficient for global existence
System remains on compact level sets of Casimirs
\(\rightarrow\) truncation argument to prove existence
Example of stochastic LP system
Zeitlin-Euler equations (Sine-Euler)
Know as SALT (Model unresolvable dynamics as stochastic forcing)
- Algebra: Skew-Hermitian matrices \(\mathfrak{su}(N)\)
- Bracket: Matrix commutator \([\cdot,\cdot]\)
- Deterministic Hamiltonian: \(H_0(W) = -\frac{1}{2}\operatorname{Tr}( (\Delta_N^{-1}W)^*W)\)
- Stochastic Hamiltonians: \(H_k = ?\)
Example of stochastic LP system
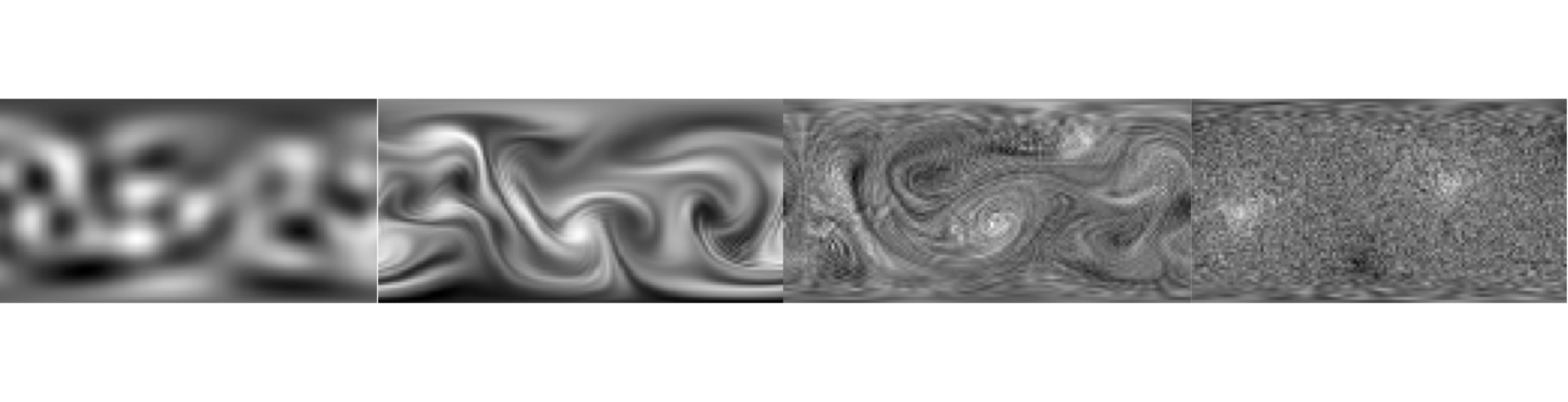
- Transport noise \(\rightarrow\) Move to Itô formulation
- Correction is a dissipative term
- Clever choice of coefficients + limit
= Navier–Stokes like behavior!
"Regularization by noise"
Careful results by Flandoli et al. in case of the flat torus for "real" Euler equations
Todo: Check the spherical case and check behavior in Zeitlin–Euler case
Structure preservation -
for accurate numerics
Classic example: rigid body
- Algebra: \(\mathfrak{so}(3) \cong \mathbb R^3\)
- Bracket: \([v,w] = w \times v\)
Structure preservation -
for accurate numerics
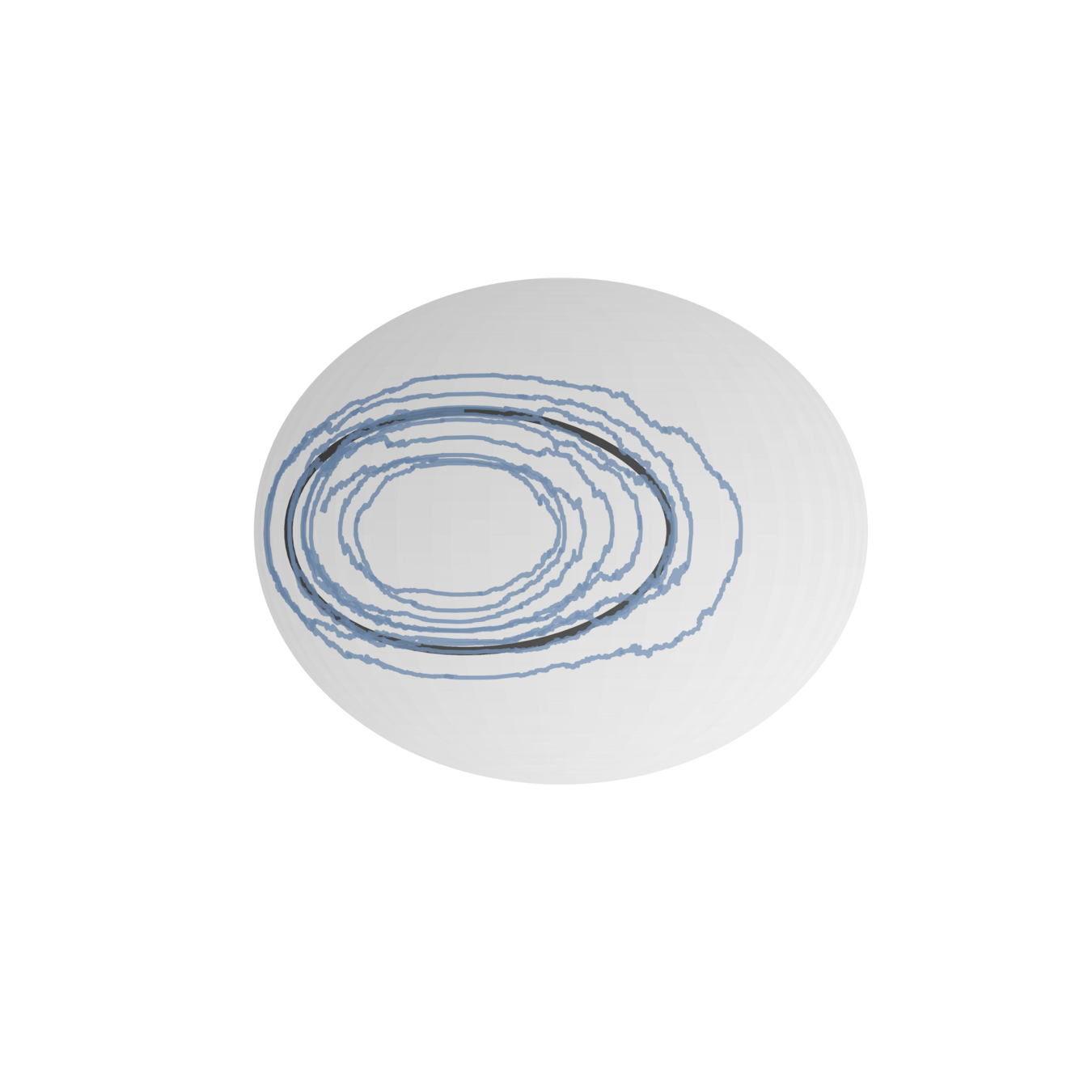
What happens if we apply an off the shelf integrator?
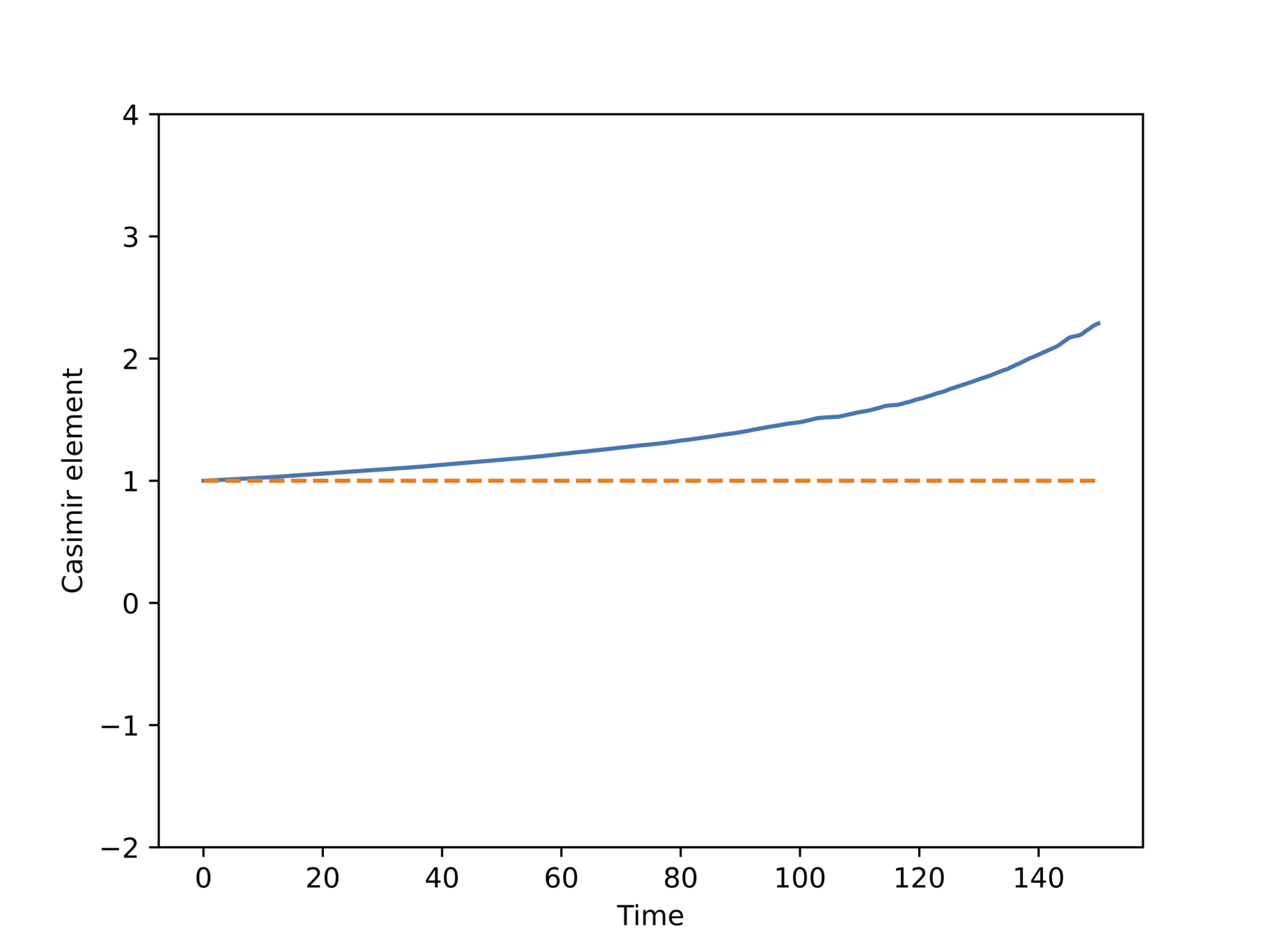
Non-physical behavior!
Structure preservation -
for accurate numerics
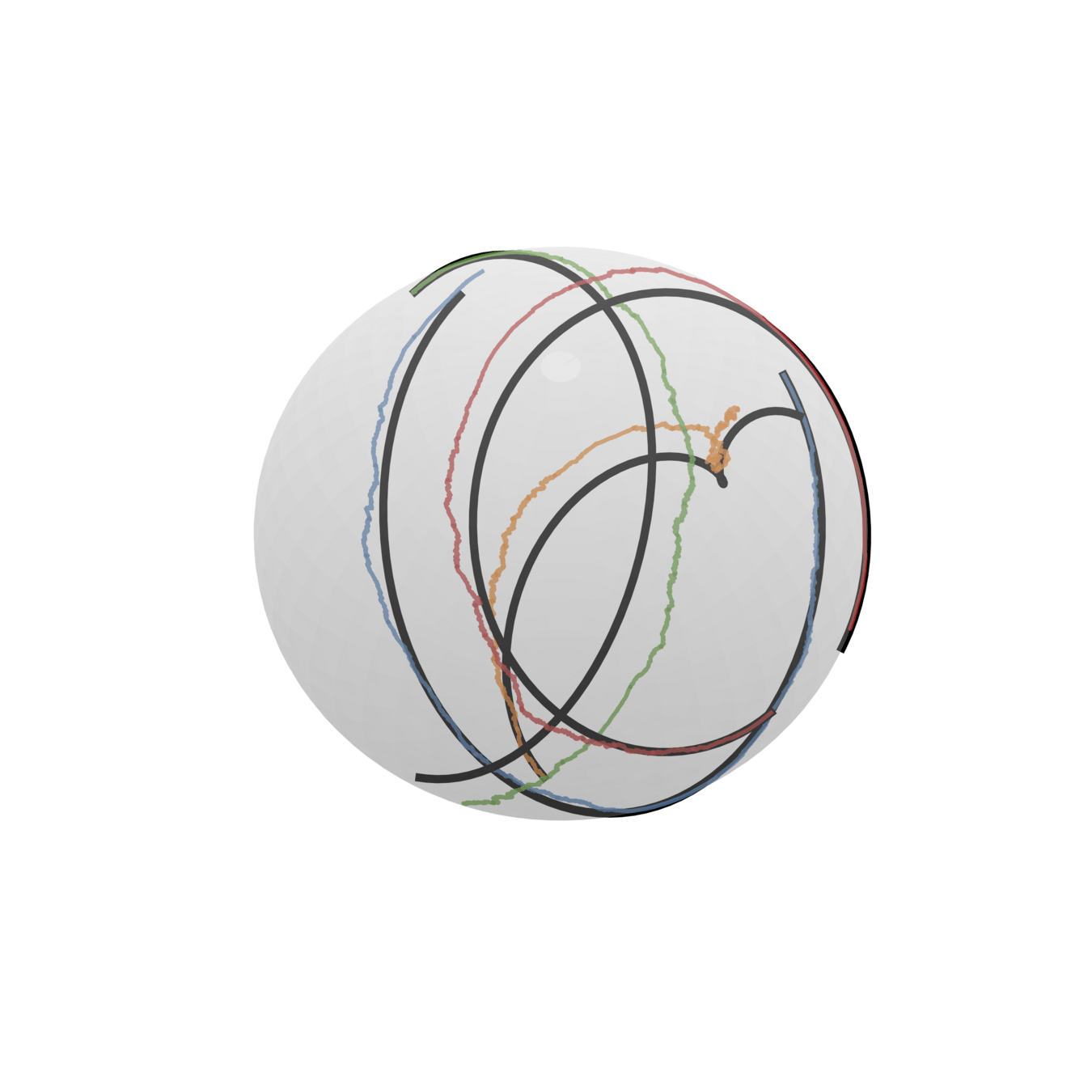
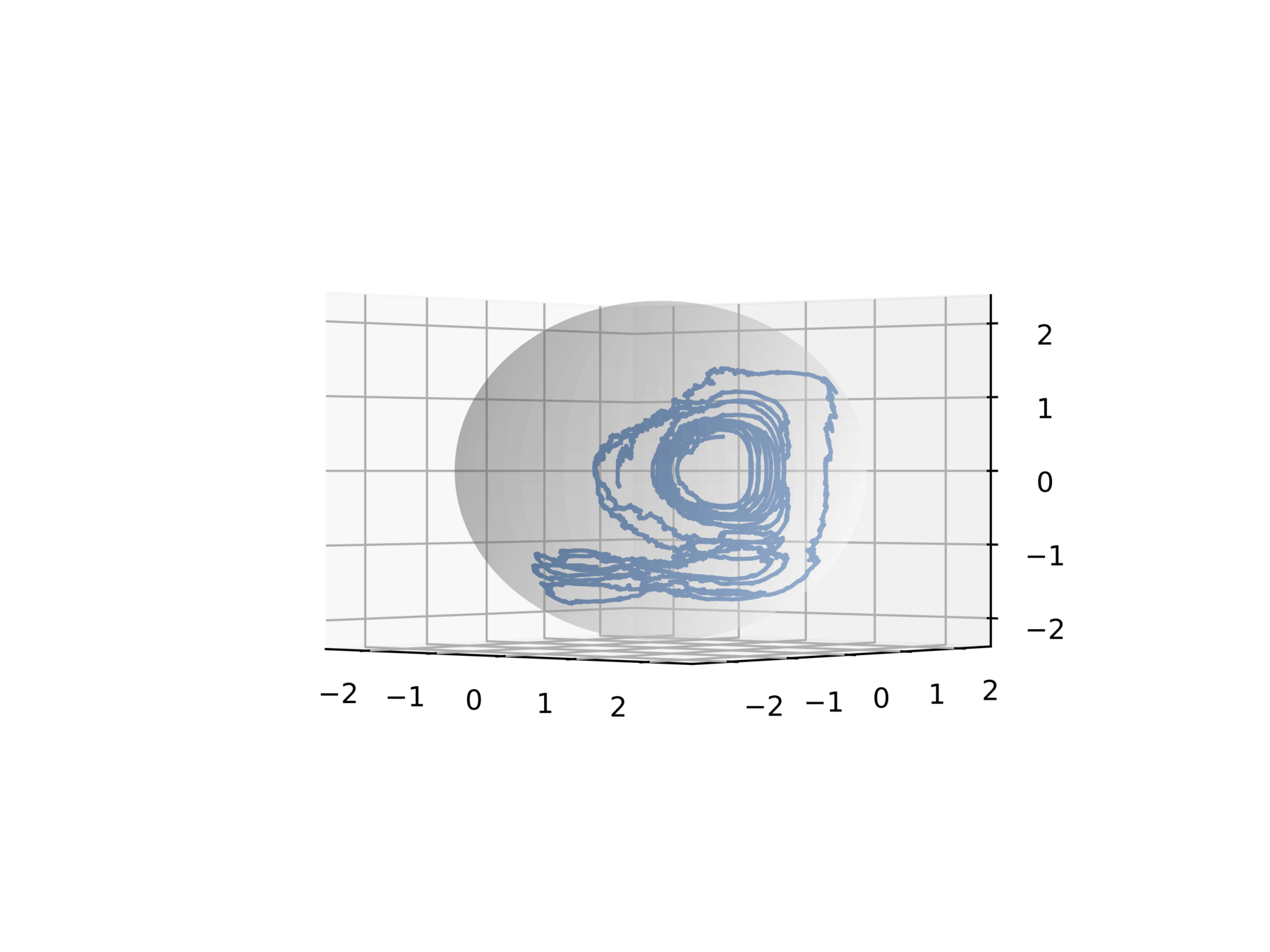
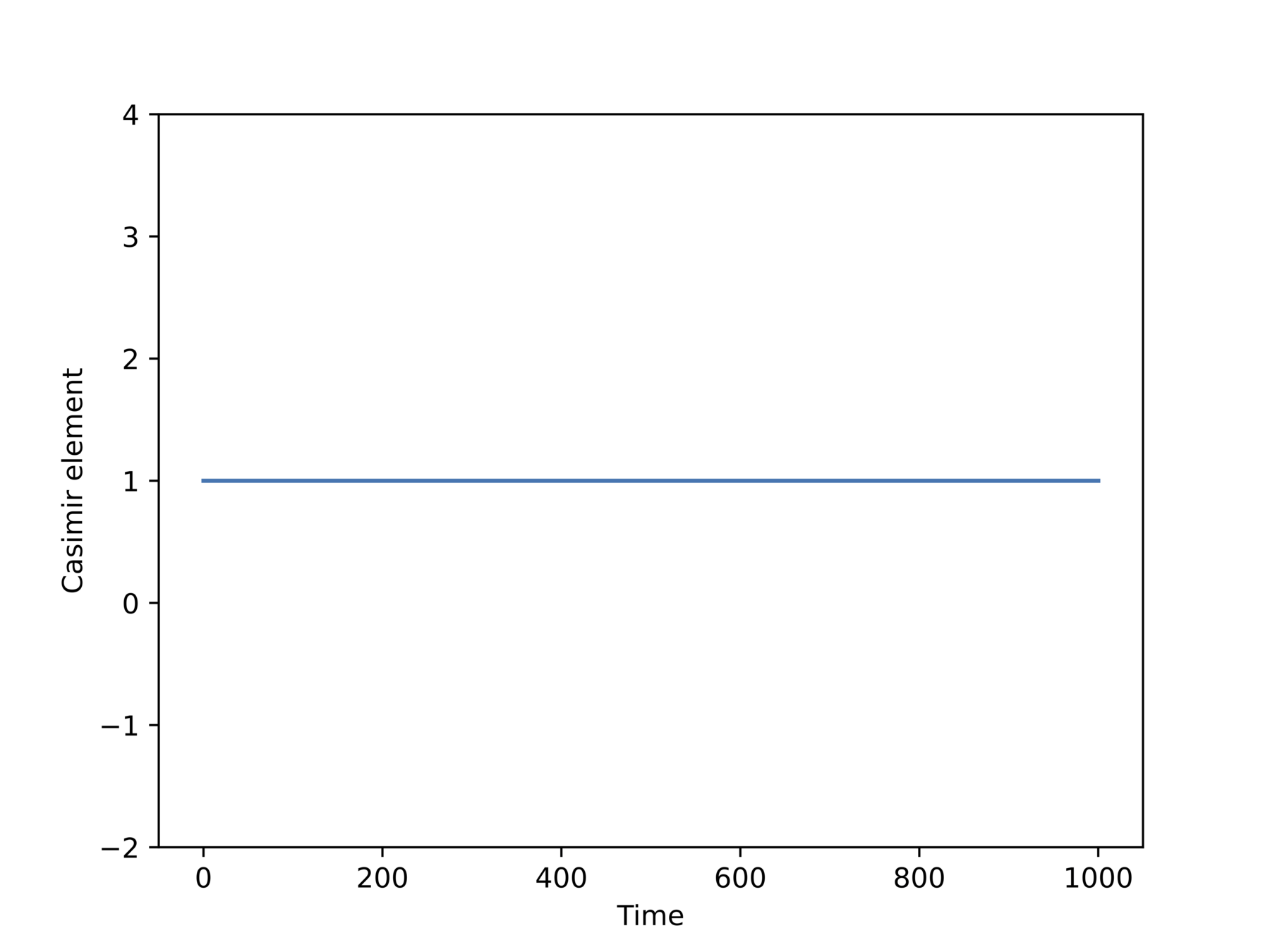
What happens with structure-preserving integrators?
Structure preservation -
for accurate numerics
Wish list:
- Preserve Casimirs a.s.
- Preserve symplectic structure on coadjoint orbits a.s.
= Lie–Poisson integrator
Also: Avoid exponential map! (expensive, matrices in our applications are \(\sim2000\times2000\) )
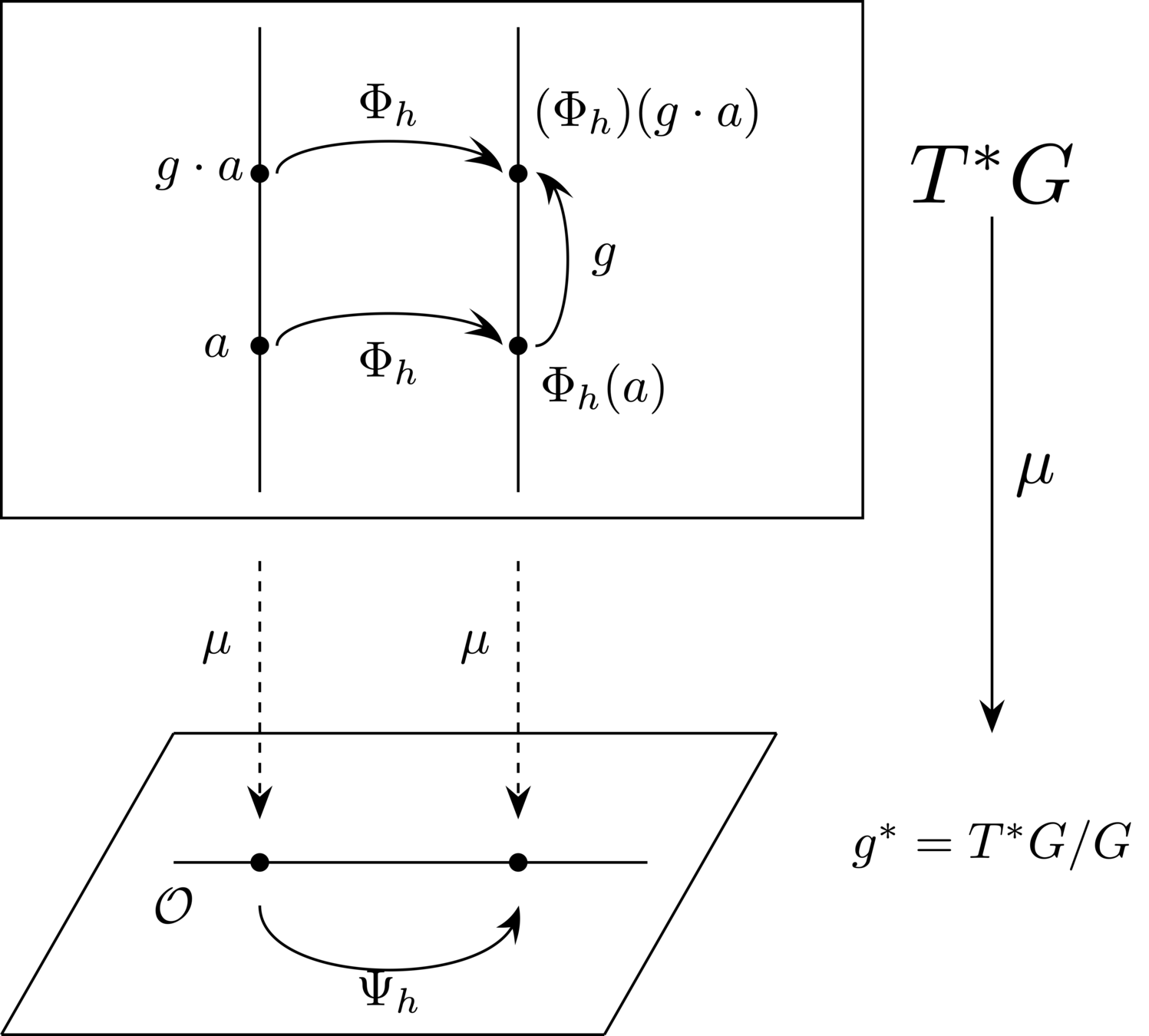
Unreducing LP systems
LP systems on \(\mathfrak{g}^*\) are reductions of Hamiltonian systems on \(T^*G \cong G \times \mathfrak{g}^*\)
\(H\colon \mathfrak{g}^* \to \mathbb R\) lifts to left-invariant Hamiltonian!
\(G\) acts on \(T^*G\) by \(g.(Q,P) = (gQ,g^{-*}P)\)
Associated momentum map:
Unreducing LP systems
Do for all Hamiltonians!
Note: No a priori guarantee that this system remains on \(T^*G\)!
Embedded into \((R^{n \times n})^2\)
However! Remains on \(T^*G\)
Unreducing LP systems
Existence and uniqueness: follows by truncation argument (system remains on \(G \times \mathcal{O}_{\mu(Q_0,P_0)})\)
Unreducing LP systems
\(X_t = \mu(Q_t,P_t) \in \mathfrak{g}^*\) satisfies
\(\Phi_h \colon T^*G \to T^* G\): \(G\)-equivariant symplectic integrator \(\rightarrow\)
Reduces to a Lie–Poisson integrator by \(\mu\)
Integration without tears
Exploit the unreduction!
Integration without tears
Do we know such an integrator?
Implicit midpoint!
- Symplectic
- Equivariant
- Well-studied
Integration without tears
Stochastic isospectral midpoint:
Take \(Q_n,P_n\) such that \(\mu(Q_n,P_n) = X_n\)
Take \(X_{n+1} = \mu(\Phi_h(Q_n,P_n))\)
Error analysis without tears
Exploit the unreduction!
Check the literature for error analysis for implicit midpoint

Error analysis with some tears
1) Show that the implicit midpoint method does not travel too far:
\(\sup_{h \geq 0} \sup_{n \geq 0} \|Q_n,P_n\| \leq R(Q_0,P_0). \)
2) Truncate the CHS system on \(T^*G\)
Upstairs
Downstairs
3) Apply error analysis from literature
Reduction by \(\mu\)
4) Convergence of method for truncated LP system
- Strong convergence: \(\mu\) is Lipschitz
- Weak convergence: \(\phi \circ \mu\) is valid test func
5) Truncated LP system = LP system
Recipe:
Error analysis with some tears
- Assume: \(H_0 \in C^4\) and \(H_1,H_2, \ldots, H_M \in C^5\).
- \(T>0\): be a fixed final time,
- \(N \in \mathbb{N}\): number of steps
- \(X_0 \in \mathfrak{g}^*\): Deterministic initial condition
- \(\phi \in C^5\): Test function
Error analysis with some tears
Geometric structure of equations and its preservation is central. Used to prove
- Existence and uniquness
- Convergence
Without structure preservation, no convergence guarantees
Mandatory error plots
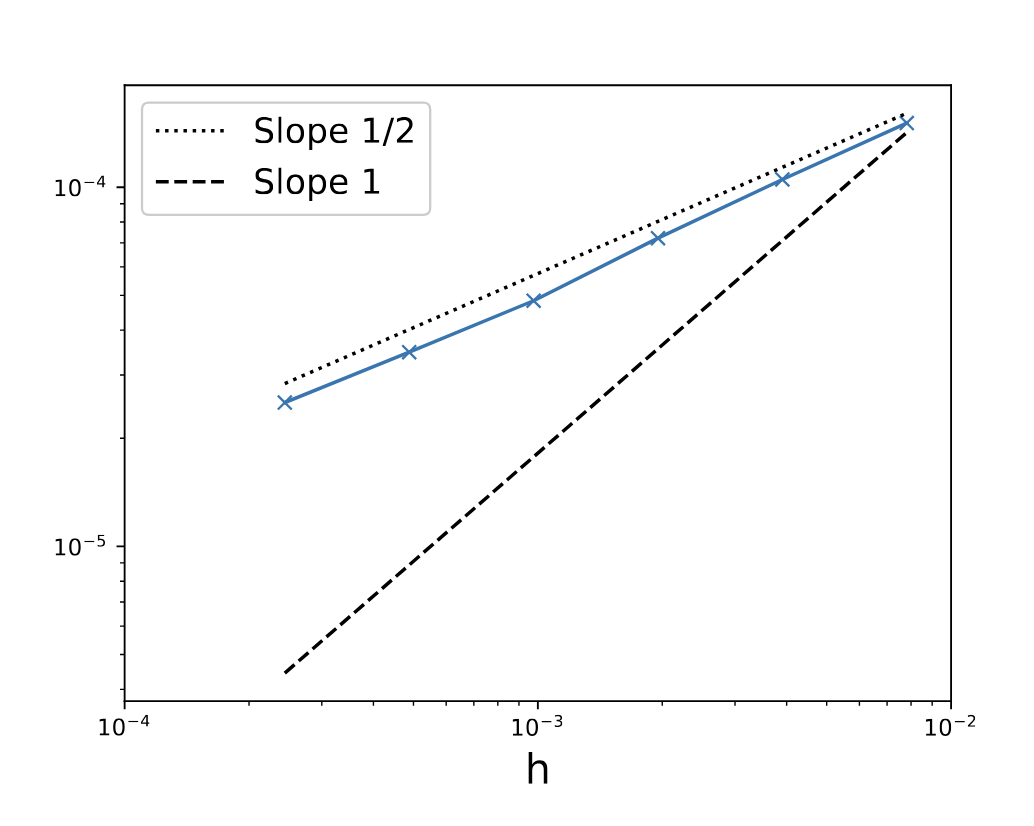
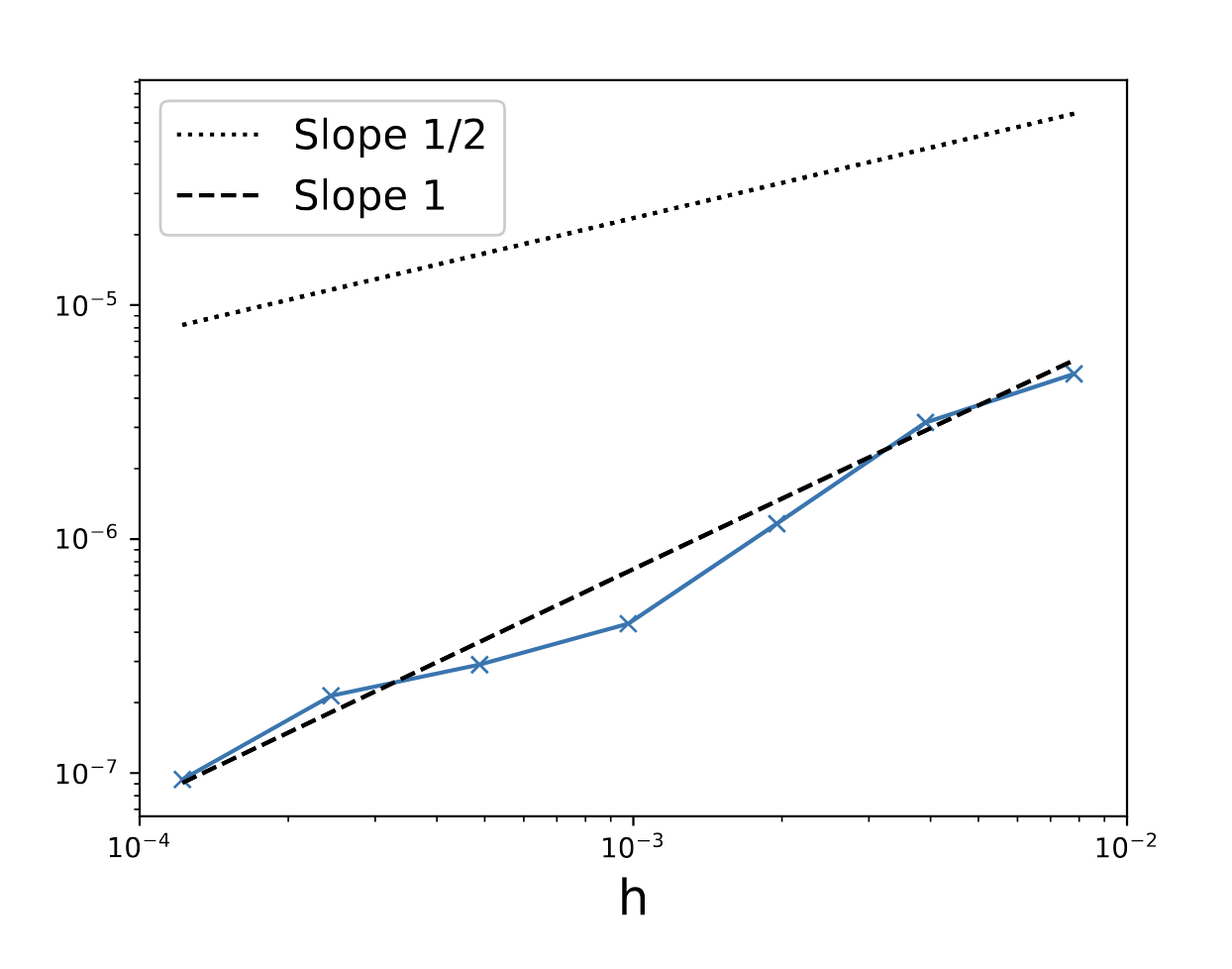
Strong error
Weak error
Rigid body
500 realizations
10^7 realizations
\(\phi(X) = \sin(2\pi x_1) + \sin(2\pi x_2) + \sin(2\pi x_3)\).
Mandatory error plots
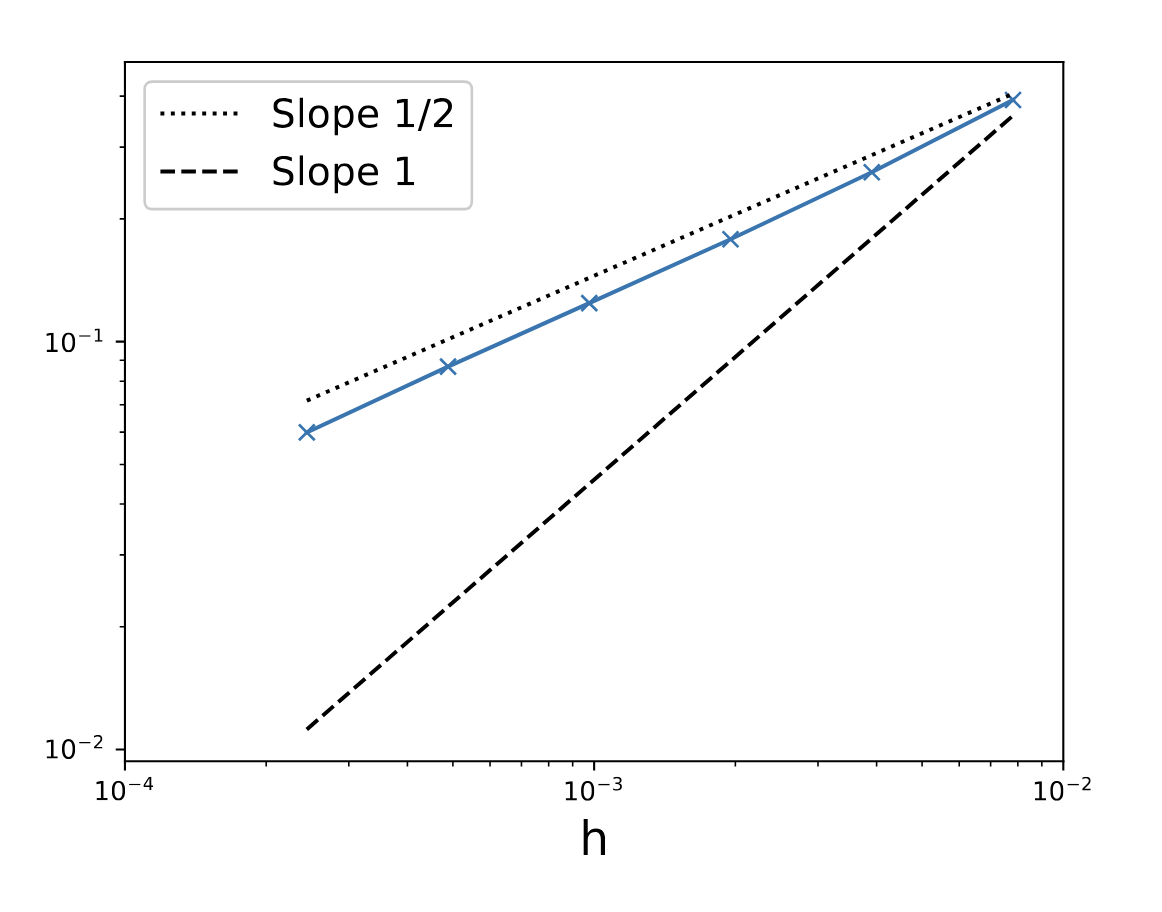
Point vortex dynamics
Strong error
500 realizations
Mandatory error plots
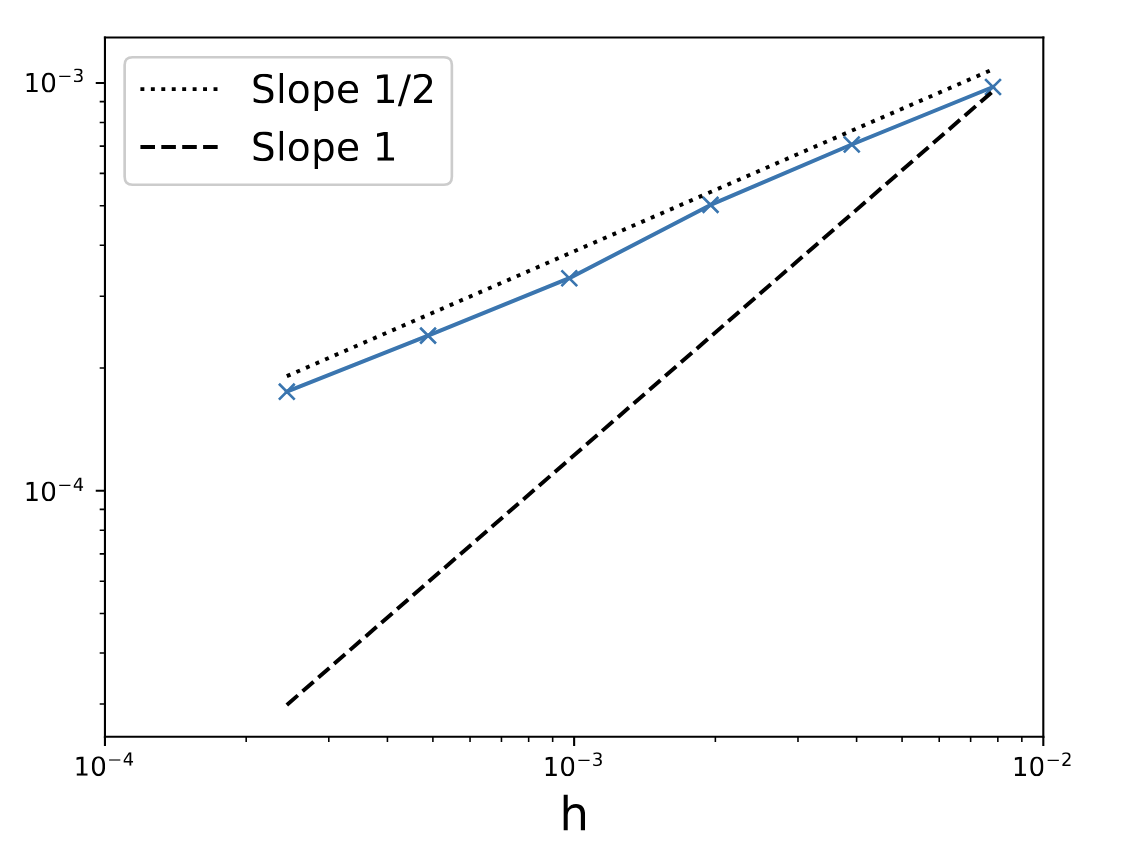
Zeitlin-Euler equations
Strong error
500 realizations
Example of stochastic LP system: outlook
Zeitlin-Euler equations (Sine-Euler on the sphere)
Hamiltonian system: Sample by HMC/PDMP-style method?
Issue: How to jump? Not a canonical system (i.e., "no separation of momentum and position"). Remain in orbit
Probably not the right way... happy for suggestions!
-
We have derived a structure-preserving integrator
-
Geometric proofs of convergence & structure preservation
-
Future work: Make use of the integrator!
- Regularization by noise
- Stochastic spin systems
- Stochastic turbulence