Introducción a la Robótica de Manipuladores
Por: Arturo Alvarado Alvarez
¿Que es la Robótica?
El término "Robótica" fue acuñado por Isaac Asimov para describir la tecnología de los robots. Él mismo predijo hace años el aumento de una poderosa industria robótica, predicción que ya se ha hecho realidad. Recientemente se ha producido una explosión en el desarrollo y uso industrial de los robots tal que se ha llegado al punto de hablar de "revolución de los robots" y "era de los robots".


¿De dónde proviene la palabra robot?
La palabra robot fue usada por primera vez en el año 1921, cuando el escritor checo Karel Capek (1890 - 1938) estrena en el teatro nacional de Praga su obra Rossum's Universal Robot (R.U.R.). Su origen es de la palabra eslava robota, que se refiere al trabajo realizado de manera forzada. La trama era sencilla: el hombre fabrica un robot, luego el robot mata al hombre.
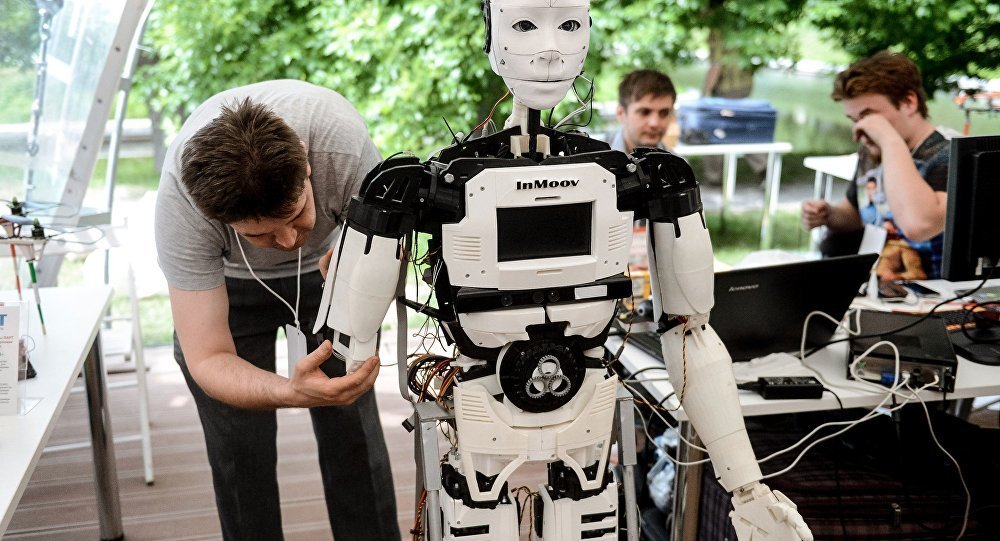
Muchas películas han seguido mostrando a los robots como máquinas dañinas y amenazadoras. Sin embargo, películas más recientes, como la saga de "La Guerra de las Galaxias" desde 1977, retratan a robots como "C3PO" y "R2D2" como ayudantes del hombre. "Número 5" de "Cortocircuito" y "C3PO" realmente tienen apariencia humana. Estos robots que se fabrican con look humano se llaman ‘androides’.

¿Que es la Robótica?
La mayoría de los expertos en Robótica afirmaría que es complicado dar una definición universalmente aceptada. Algunas de las más aceptadas son las siguientes:
-
-
Ingenio mecánico controlado electrónicamente, capaz de moverse y ejecutar de forma automática acciones diversas, siguiendo un programa establecido.
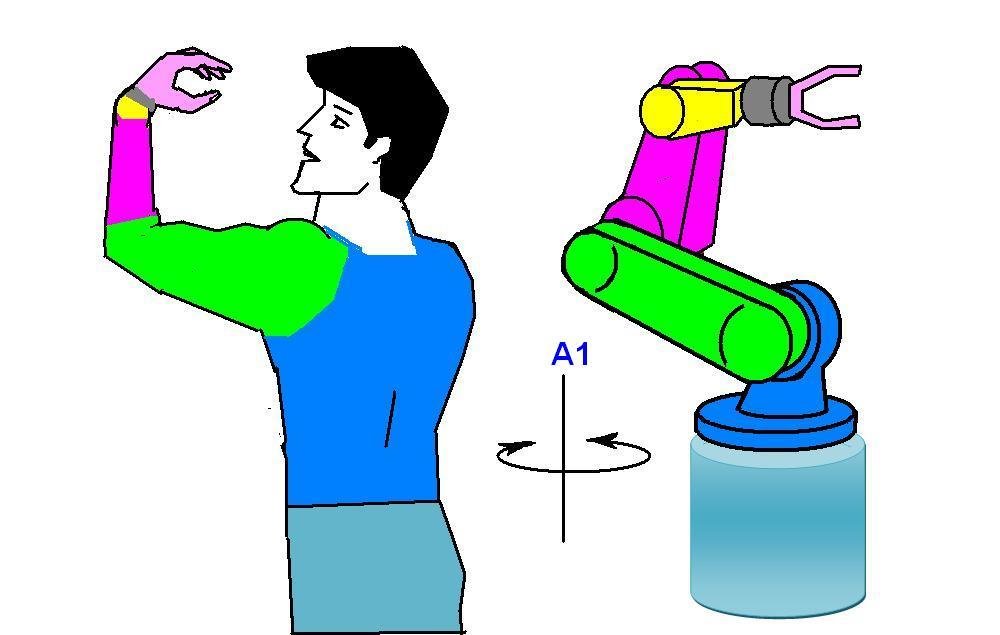
- Máquina que en apariencia o comportamiento imita a las personas o a sus acciones como, por ejemplo, en el movimiento de sus extremidades
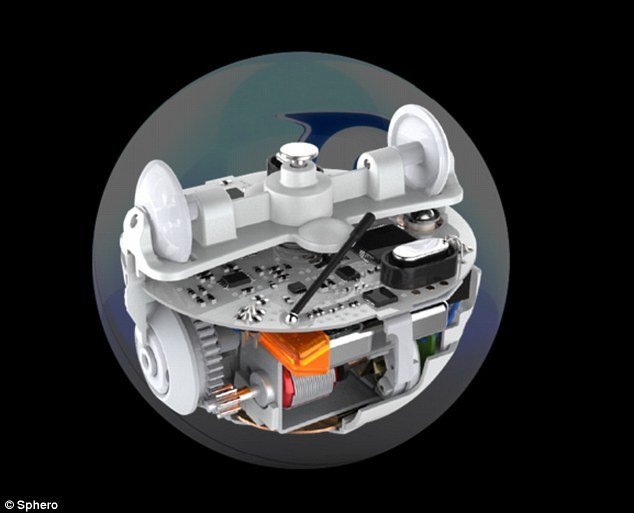
- Un robot es una máquina que hace algo automáticamente en respuesta a su entorno.
- Un robot es un puñado de motores controlados por un programa de ordenador.
- Un robot es un ordenador con músculos.
-


(1)
(2)
(3)
(4)
(5)
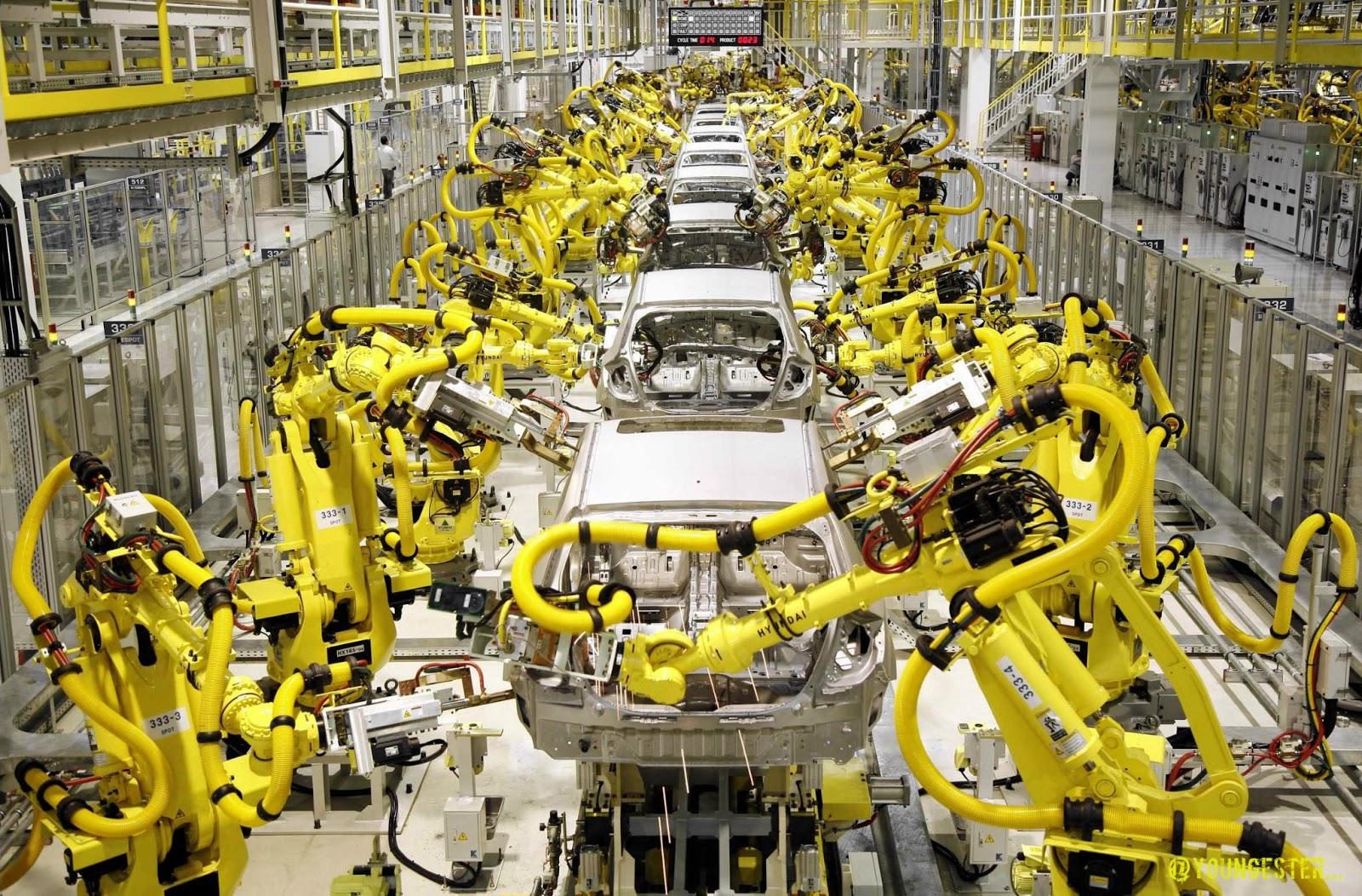
ESTO ES ROBÓTICA
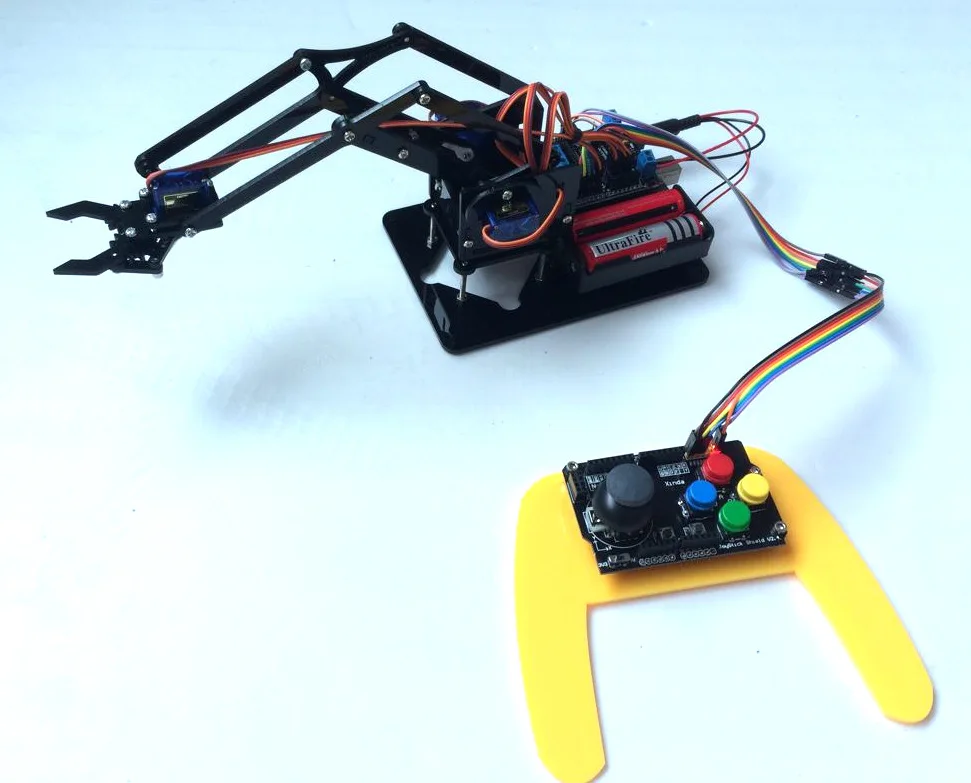
¿Que son los robots manipuladores?
Son sistemas mecánicos multifuncionales, con un sencillo sistema de control, que permite gobernar el movimiento de sus elementos, de los siguientes modos:
-
Manual: Cuando el operario controla directamente la tarea del manipulador.
-
De secuencia fija: cuando se repite, de forma invariable, el proceso de trabajo preparado previamente.
-
De secuencia variable: Se pueden alterar algunas características de los ciclos de trabajo.
Existen muchas operaciones básicas que pueden ser realizadas óptimamente mediante manipuladores, por lo que se debe considerar seriamente el empleo de estos dispositivos, cuando las funciones de trabajo sean sencillas y repetitivas.
De secuencia variable
De secuencia Fija
Manual
Cinemática directa
La cinemática de un robot es el estudio de los movimientos de un robot. En un análisis cinemático la posición, velocidad y aceleración de cada uno de los elementos del robot son calculados sin considerar las fuerzas que causan el movimiento. La relación entre el movimiento y las fuerzas asociadas son estudiadas en la dinámica de robots.
- Datos Conocidos: Ángulos articulares y geometría de los eslabones
- Datos a determinar: Posición y orientación del actuador final.
Cinemática Inversa
la Cinemática inversa (IK) es la técnica que permite determinar el movimiento de una cadena de articulaciones para lograr que un actuador final se ubique en una posición concreta.
- Datos Conocidos: Posición y orientación del actuador final.
- Datos a determinar: Ángulos de las articulaciones y la geometría de los eslabones.
Cinemática Directa vs Inversa

Dinámica de Robots
La dinámica del robot relaciona el movimiento del robot y las fuerzas implicadas en el mismo. El modelo dinámico establece relaciones matemáticas entre las coordenadas articulares (o las coordenadas del extremo del robot), sus derivadas (velocidad y aceleración), las fuerzas y pares aplicados en las articulaciones (o en el extremo) y los parámetros del robot (masas de los eslabones, inercias, etc).
- Metodo de Newton-Euler: permite obtener un conjunto de ecuaciones recursivas hacia delante de velocidad y aceleración lineal y angular las cuales están referidas a cada sistema de referencia articular.
- Metodo de Lagrange: la cual describe el comportamiento de un sistema dinámico en términos del trabajo y la energía almacenados en el sistema, en vez de las fuerzas y momentos de los miembros individuales involucrados.
