Meet with me
in November
10 minutes



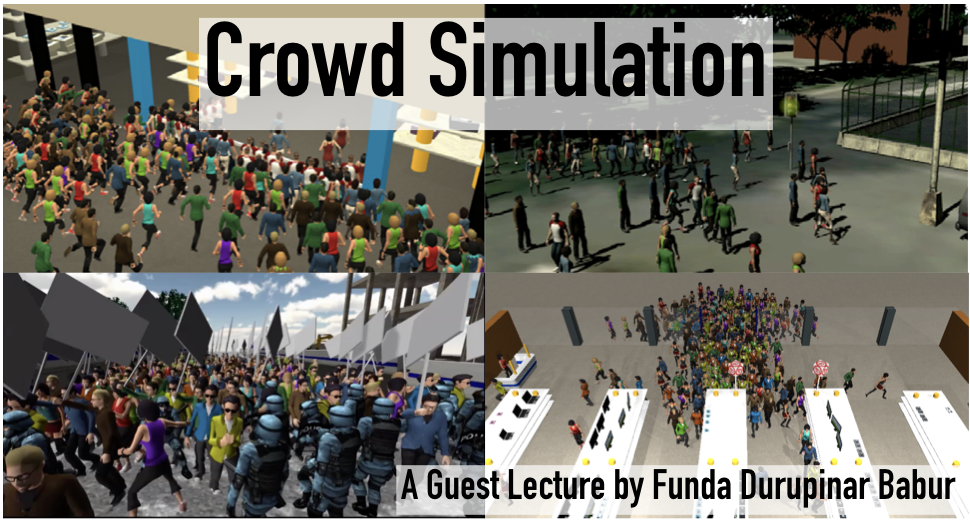
Remote Guest Lecture
Friday 10 / 30

Wednesday 11 / 04 / 2020
Assignment 6
Due 11 / 02
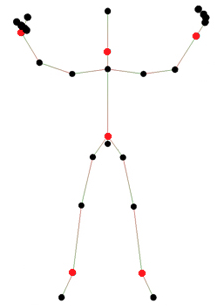
Head
Upper Arm
Lower Arm
Hand
q
q (0, 0, 0, 1)
Identity
X
Head
Upper Arm
q
q (0, 0, 0, 1)
Identity
X
q2 (Math.sin(T/2),
0,
0,
Math.cos(T/2))
Rotate 180° in X
T = Math.PI
q
q2
Arm down
Arm up
Time
Frames
Keyframe 2
Keyframe 1
slerp Interpolation
60 FPS
60 Hz
60 1/s
Modern computer screens
Skinning
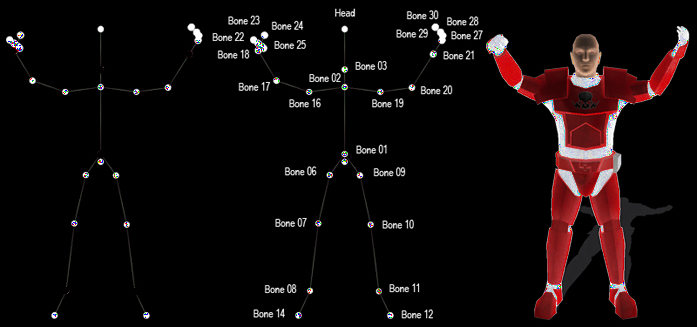
Skeleton -> Mesh
Rigging
Mesh -> Skeleton

Blender, 3D Studio Max, Maya
Kinematics
Forward Kinematics
Inverse Kinematics
Move down the scene graph
Move up in the scene graph
q
Upper Arm
Hand
q
Upper Arm
Hand
q
Upper Arm
Hand
Multiple Solutions!
Head
Upper Leg
1
2
3
Robot.prototype.onAnimate = function() {
if (this.movement == 'raise left arm') {
var T = -Math.PI;
this.left_upperarm.quaternion.slerp( new THREE.Quaternion(Math.sin(T/2), // x
0, // y
0, // z
Math.cos(T/2)), // w
0.1 );
} else if (this.movement == 'kick') {
// check if slerp reached almost the end
if (this.right_upperleg.quaternion.w < 0.72) {
// signal that the kick is done and the leg should move back
this.movement = 'kick done';
} else {
var T = -Math.PI/2;
this.right_upperleg.quaternion.slerp( new THREE.Quaternion( Math.sin( T / 2 ), // x
0, // y
0, // z
Math.cos( T / 2 ) ), // w
0.1 );
}
} else if (this.movement == 'kick done') {
// reset leg back to identity
this.right_upperleg.quaternion.slerp( new THREE.Quaternion(0,0,0,1), 0.1 );
}
};
w
during slerp "w" goes from 1 to 0.7
w