Geometric Algebra and Self Driving Cars
Hugo Hadfield, 2021
What is a Self Driving Car?
Several high definition cameras
Automotive RADAR
Speed and steering sensors
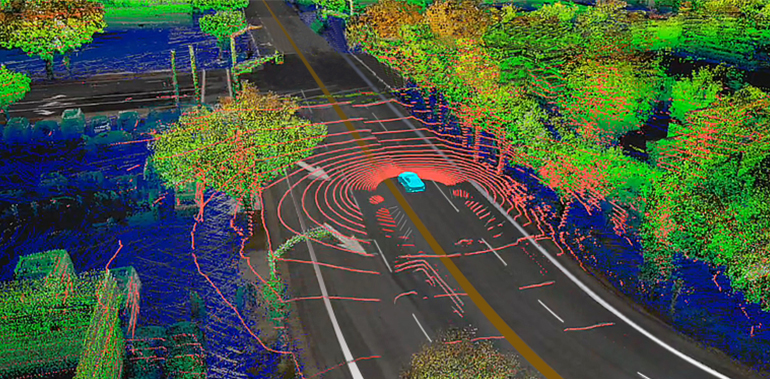
LIDAR system

GPS and IMU/INS
Bundle Adjustment
- Where are the cameras relative to each other?
- What does the scene look like in 3D?
- One of the most important problems in applied computer vision
Bundle Adjustment
Minimise \(C\) with respect to \(\Phi_i\) and \(Y_j\)
Bundle Adjustment
Minimise \(C\) with respect to \(\Phi_i\) and \(Y_j\)
This is a Convex Optimisation Problem
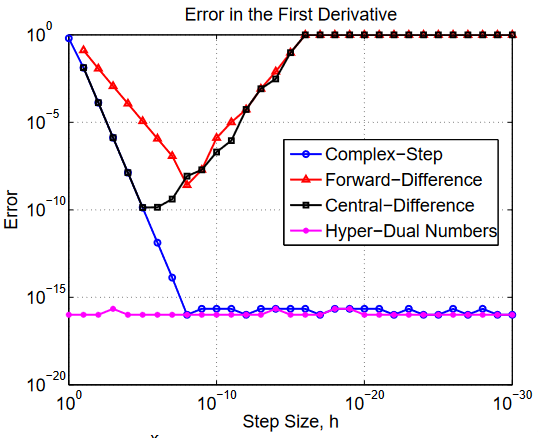
For derivatives we can simply construct the clifford algebra over the complex numbers or over the dual numbers!
Complex/Dual number Autodiff
We can calculate automatic derivatives through complex/dual number autodiff
See the work of Jeffrey Fike:
Hyper Complex/Dual number GA isomorphisms

- The hyper complex and hyper dual numbers have known isomorphisms to subalgebras of certain Clifford algebras
- So long as you have a software package that can handle type stability for Clifford algebras over (a subset of communtative) Clifford algebras you get autodiff built in!
SLAM
If we take our collection of cameras on a drive they can repeatedly do bundle adjustments and build up a 3D map of the world!
We could even use multiple frames from a single camera moving through space
LIDAR DATA
LIDAR SLAM
- At each point in time we get a point cloud
- Align each point cloud with the previous one
- Build up 3D map of the world and of how you have moved relative to it
- But how do you align the (often quite sparse) point clouds?
- Not many GA methods yet, interesting area of work!
Localisation to HD Maps
- Most self-driving cars operate by localising themselves relative to high definition point cloud maps
Model Based Motion Filtering
Given a noisey sequence of measurements of the positions of a moving car how do you estimate its position at any point in time?
Describe each position with a rotor
Convex optimisation, minimising difference between position and measurment and function of the path
Model Based Motion Filtering
Describe the state of the car at a point in time with a vector
We include, combined position and rotation: \(\Phi\)
Combined linear and angular velocity: \(\Psi\)
Design a function that takes a given state and advances it one time step. Use this motion model to propogate uncertainty about the state of the car:
This is the basic setup required for an (extended/unscented) Kalman Filter
Model Based Motion Filtering
Set up a state like this:
Set up a process function (Cayley kinematic equation):
Set up a measurement function:
Processing depth images
Given a depth image of the road, reject outliers and fit a plane
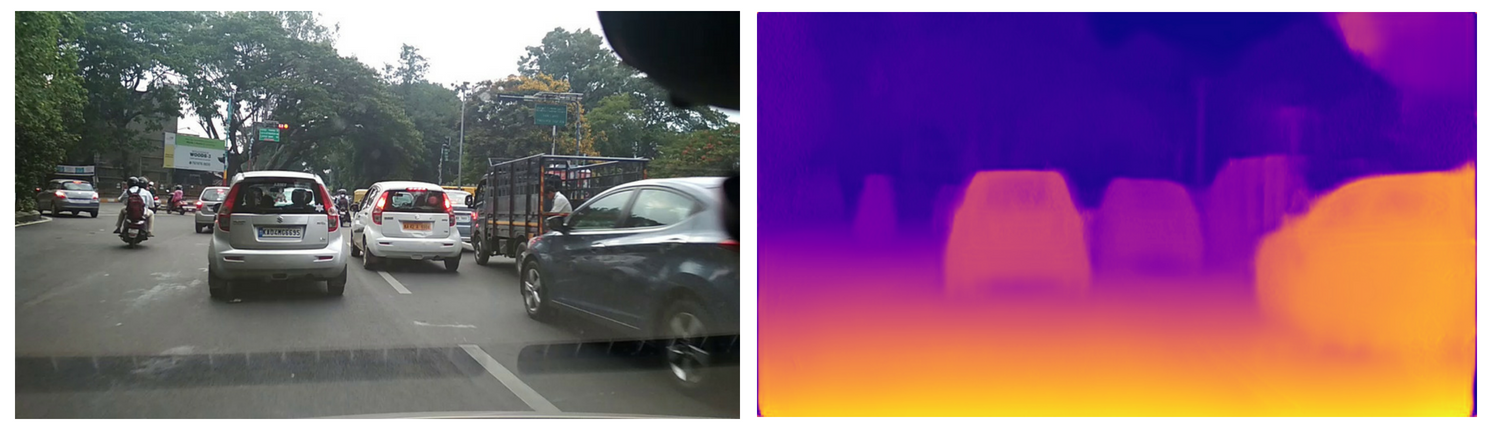
Monodepth machine learning models generate depth maps
- Semantic segmentation to get the depth of the road area
- Fit plane by looking for the eigen-blade of:
Simulation
- Almost all self-driving companies use simulation for training and verification
- Simulation systems tend to be similar to or to directly use games engines for physics and lighting
- GA has a long history of being used in games and graphics!
Forces and Moments
- The Screw Theory perspective views forces as lines:
- To have the equivalent in PGA you can simply swap \(n_\infty\) for \(e_0 \)
- Adding lines together gives screws
- Antiparallel force lines add to give a force couple, a pure moment (or torque or whatever you want to call it!)
- Form of a moment:
- Form of a screw:
force magnitude
force direction
3d point through which the line passes
Momentum, Inertia and Velocity (CGA)
- The unbalanced resultant wrench acting on a rigid body is defined as the derivative of the screw momentum \(\Omega\)
- The mapping between screw momentum and screw velocity is produced by the inertia tensor
Momentum, Inertia and Velocity (PGA)
- In PGA we need to use an alternative to reciprocal frames to describe the principal screws and so use a pseudo-reciprocal frame a la Gunn []
- Or, defining a mapping \(J\), we can use a componentwise scaling A:
Free Dynamics
- We will set up our state at a given time as follows:
- Substitute in for the angular velocity:
- And you can now plug this into your favourite initial value problem solver (eg. RK4) and simulate away!
Computer Graphics
GA Neural Networks
- Are GA neural networks worthwhile? Quite a lot of hype in this area, would be good to see results!
- What should GA neural networks look like mathematically
- Activation functions are difficult to define
- As far as I am aware no one has properly benchmarked GA NN against existing state of the art methods
Summary
- We can build almost the entire self-driving stack in Geometric Algebra
- Building self driving cars with GA is worthwhile because it is interdisciplinary and GA is a unifying framework
- Still work to do in point cloud processing with GA
- Still work to do in benchmarking GA neural network methods. Are they worthwhile at all?