Intro to GA for CS
Geometric/Clifford Algebra
- GA is about studying the properties of the real Clifford algebras
- We typically describe which algebra we are working in with the following syntax:
- This syntax defines a set of basis vectors
- For these basis vectors we define the geometric product:
p vectors
q vectors
r vectors
- For vectors this product is anticommutative:
Example 3D GA
- Consider the algebra:
- This creates 3 basis vectors that square to 1:
- We will write the product of two vectors with the shorthand:
- The geometric product is distributive and associative:
Grade Selection
- Define another operation, the grade selection operation:
- If there is nothing of the grade in there, then it gives 0:
- Consider the result:
- The result of the geometric product can be written with grade selection:
Inner and Outer Products
- Consider the result:
Inner (dot) product
- This motivates us to define two new products:
Outer (wedge) product
- For vectors in GA this leads us to the result:
What is it good for?
- Each algebra can be viewed as a domain specific language for some specific geometry
- All the algebras share the same basic operations, learn them once, use them everywhere
- Cl(3,0,0) - 3D vectors, quaternions, projections
- Cl(4,0,0) - Homogeneous points, lines, planes, rotations, projections
- Cl(3,0,1) - Homogeneous points, lines, planes, projections, intersections, dual quaternions, screw theory, rigid body dynamics
- Cl(4,1,0) - Everything in Cl(3,0,1) + line-segments, circles, spheres, all conformal transformations, distance geometry
- Cl(4,2,0) - 3D Lie Sphere Geometry
- Cl(4,4,0) - Homogeneous points, lines, quadrics, rotations, shear transformations
- Cl(8,2,0) - Everything in Cl(4,1,0) + Quadrics, Dupin Cyclides + probably a lot more
Algebras for 3D Euclidean space (there are lots more):
Some algebras for non-Euclidean space (there are lots more):
- Cl(1,3,0) - Space time algebra, Lorentz transformations, electromagentism
- Cl(4,0,0) - Spherical and hyperbolic space, quantum mechanics
Serial Robot Forward Kinematics CGA
Can we construct a rotor from origin to endpoint?
Construct the base rotors
Construct the first link's translation rotor
Construct the elbow and link 2 translation rotor
The combined rotor is the product of all of them
Serial Robot Inverse Kinematics
(If \(P^2 < 0 \) then y is out of reach)
Construct a sphere at the base, \(n_0\)
Construct a sphere at the endpoint, y
Intersect the spheres to give a circle
Define a vertical plane through the endpoint and base
Intersect the circle and the plane to give a point pair
Choose one of the elbow position solutions
\( A \vee B \) is just \( I_5(I_5A \wedge I_5B) \)
\( I_5 = e_1e_2e_3e_4e_5 \)
Model of a Delta Robot
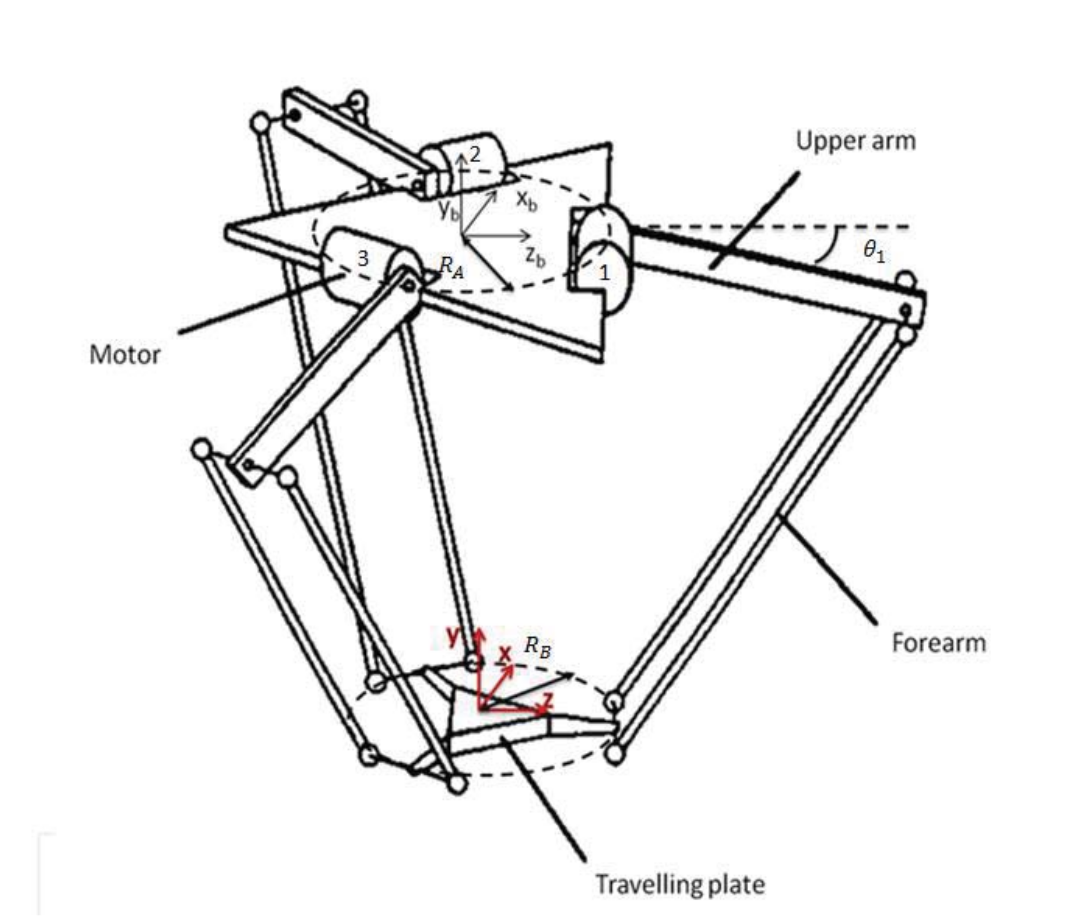
Forward Kinematics
Get the pseudo-elbow point \(A_i\)
Construct a sphere about the pseudo-elbow
The intersection of the three spheres (one from each limb) correspond to the two possible possitions of the centre of the end plate
Implementations
- Writing a fast GA implementation can be hard as multivectors are typically very sparse and some algebras can be very high dimensional
- People get around this in a few ways:
- Really good data structures: GARAMON
- C++ templating - GAL, versor, GATL
- JIT compilers - clifford, ganja.js
- Symbolic optimisation - GAALOP
- Only support one algebra and hand optimise it with SIMD etc. to be very fast - Klein
- Sparse representation and codegen - Gaigen2
- Load it all on the GPU with tensorflow - tfga
GA and proof systems
- There seems to have been some work on using proof systems for GA:
- There are a few symbolic GA packages:
- Maple (various)
- Python - galgebra
- There has also been work done on using geometric/clifford algebras for proof systems:
Additional reading
- Clifford Algebra to Geometric Calculus (Hestenes and Sobczyk)
- Geometric Algebra for Physicists (Chapter 4 contains axiomatic construction)
- Geometric Algebra For Computer Science, An Object Oriented Approach to Geometry