Quaternion Multiplication
q_1 = w_1 + x_1\textbf{i} + y_1\textbf{j} + z_1\textbf{k}
q_2 = w_2 + x_2\textbf{i} + y_2\textbf{j} + z_2\textbf{k}
\textbf{ij = -ji = k, \,\, kj = -jk = i, \,\, ki = -ik = j}\\
\textbf{i}^2 = \textbf{j}^2 = \textbf{k}^2 = \textbf{ijk} = -1 \\\\
\\
q_1q_2 = (w_1 + x_1\textbf{i} + y_1\textbf{j} + z_1\textbf{k})(w_2 + x_2\textbf{i} + y_2\textbf{j} + z_2\textbf{k})\\
% = w_1w_2 + x_1w_2i + y_1w_2j + z_1w_2k + \\
% w_1x_2i + x_1x_2ii + y_1x_2ji + z_1x_2ki + \\
% w_1y_2j + x_1y_2ij + y_1y_2jj + z_1y_2kj + \\
% w_1z_2k + x_1z_2ik + y_1z_2jk + z_1z_2kk \\
% \\
= (w_1w_2 - x_1x_2 - y_1y_2 - z_1z_2) + \\
(x_1w_2 + w_1x_2 - z_1y_2 + y_1z_2)\textbf{i} \\
(y_1w_2 + w_1y_2 - x_1z_2 + z_1x_2)\textbf{j} \\
(z_1w_2 + w_1z_2 - y_1x_2 + x_1y_2)\textbf{k}\\
void mul(Quat4d & q1, Quat4d & q2, Quat4d & q3) {
q3.w = q1.w * q2.w - q1.x * q2.x - q1.y * q2.y - q1.z * q2.z;
q3.x = q1.x * q2.w + q1.w * q2.x - q1.z * q2.y + q1.y * q2.z;
q3.y = q1.y * q2.w + q1.w * q2.y - q1.x * q2.z + q1.z * q2.x;
q3.z = q1.z * q2.w + q1.w * q2.z - q1.y * q2.x + q1.x * q2.y;
}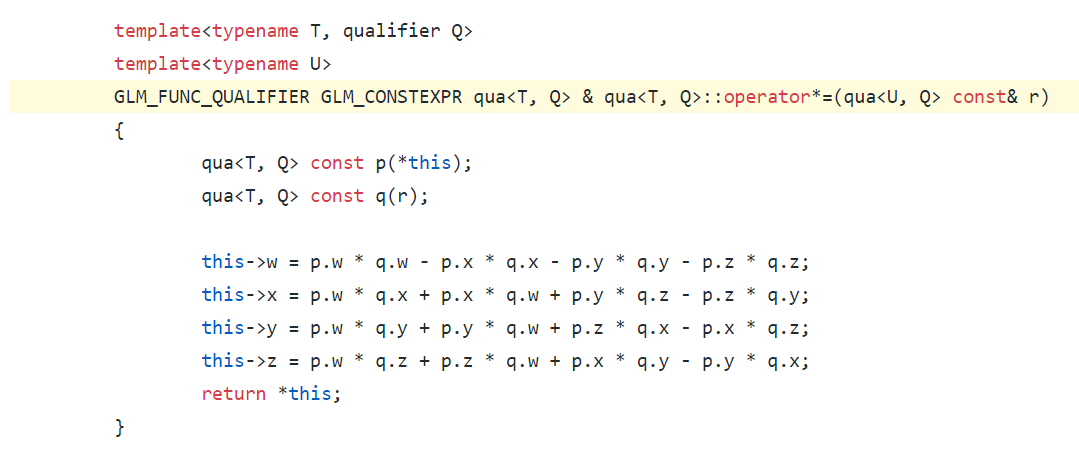
GLM Real Code
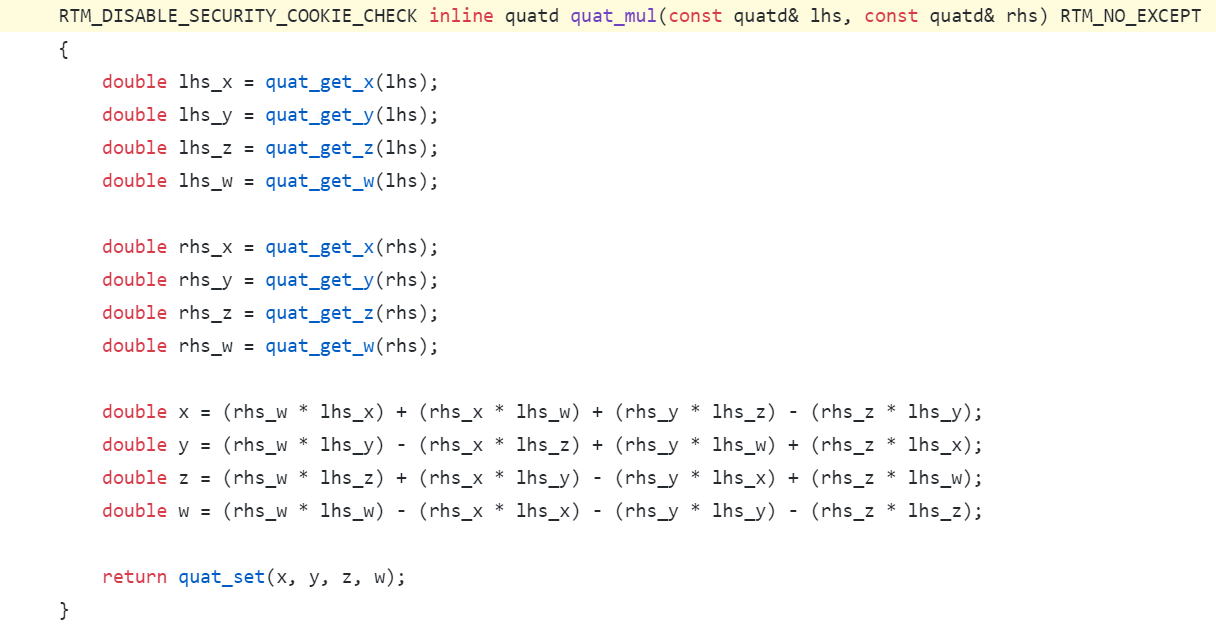
RTM Real Code
Rotation by Quaternions
q_1 = w_1 + x_1\textbf{i} + y_1\textbf{j} + z_1\textbf{k}
\tilde{q_1} = w_1 - x_1\textbf{i} - y_1\textbf{j} - z_1\textbf{k}
v' = q_1v\tilde{q_1} = q_1(x_v\textbf{i} + y_v\textbf{j} + z_v\textbf{k})\tilde{q_1}\\
void mul(Point3D & v, Quat4d & q2, Quat4d & qout) {
qout.w = -v.x * q2.x - v.y * q2.y - v.z * q2.z;
qout.x = v.x * q2.w - v.z * q2.y + v.y * q2.z;
qout.y = v.y * q2.w - v.x * q2.z + v.z * q2.x;
qout.z = v.z * q2.w - v.y * q2.x + v.x * q2.y;
}
void rotate(Quat4d & q1, Point3D & v, Point3D & vout) {
w2 = -v.x * q2.x - v.y * q2.y - v.z * q2.z;
x2 = -v.x * q2.w + v.z * q2.y - v.y * q2.z;
y2 = -v.y * q2.w + v.x * q2.z - v.z * q2.x;
z2 = -v.z * q2.w + v.y * q2.x - v.x * q2.y;
vout.x = q1.x * w2 + q1.w * x2 - q1.z * y2 + q1.y * z2;
vout.y = q1.y * w2 + q1.w * y2 - q1.x * z2 + q1.z * x2;
vout.z = q1.z * w2 + q1.w * z2 - q1.y * x2 + q1.x * y2;
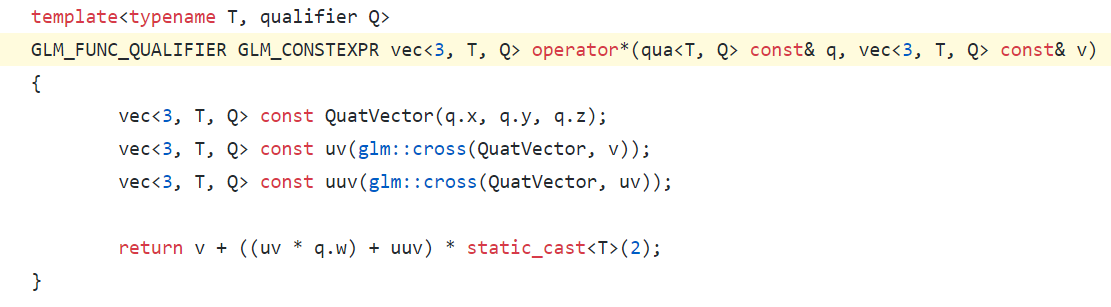
}GLM Real Code
Uses an equivalent formulation but with cross products
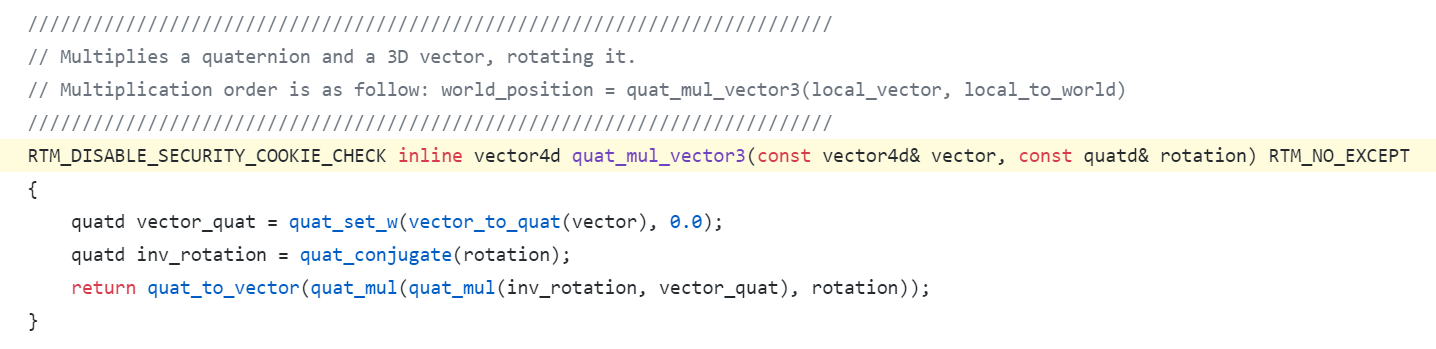
RTM Real Code
SLERP
q_1 = w_1 + x_1\textbf{i} + y_1\textbf{j} + z_1\textbf{k}
q_2 = w_2 + x_2\textbf{i} + y_2\textbf{j} + z_2\textbf{k}
q_\alpha = \frac{\sin\left((1 - \alpha)\Omega\right)}{\sin{\Omega}}q_1 + \frac{\sin(\alpha\Omega)}{\sin(\Omega)}q_2