19AIE201
Introduction to Robotics
Evaluation 4
19AIE201
Introduction to Robotics
Aadharsh Aadhithya - CB.EN.U4AIE20001
Anirudh Edpuganti - CB.EN.U4AIE20005
Madhav Kishor - CB.EN.U4AIE20033
Onteddu Chaitanya Reddy - CB.EN.U4AIE20045
Pillalamarri Akshaya - CB.EN.U4AIE20049
Team-1
19AIE201
Introduction to Robotics
Question 1
Elaborate and clearly explain standard DH parameters with examples of robot configurations taught in class
(i) 3R spatial Robot
(ii) SCARA Robot(4 DOF)
For the above cases do the comparison between standard DH parameters and modified DH parameters and point out the differences
19AIE201
Introduction to Robotics
Question 1
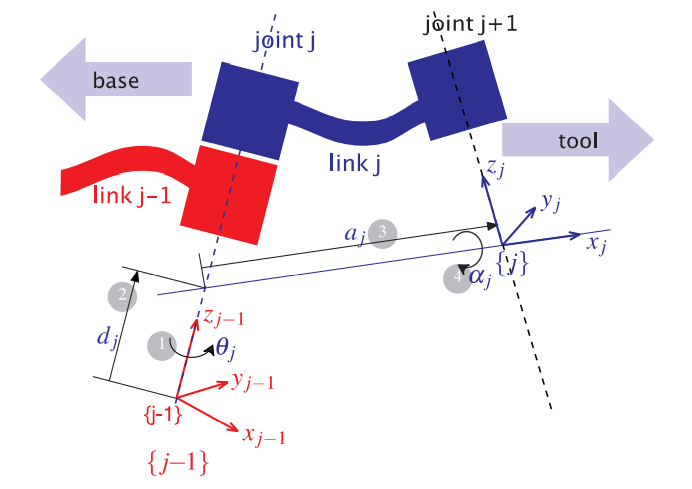
DENAVIT - HARTENBERG
(D-H) Parameters
DENAVIT - HARTENBERG
(D-H) Parameters
DENAVIT - HARTENBERG
(D-H) Parameters
: angle between
and
axes about the
axis
DENAVIT - HARTENBERG
(D-H) Parameters
: distance from origin to
axis
along
DENAVIT - HARTENBERG
(D-H) Parameters
: distance between
axis
along
and
DENAVIT - HARTENBERG
(D-H) Parameters
: angle between
axis
along
and
DENAVIT - HARTENBERG
(D-H) Parameters
The homogeneous transformation is represented as
MODIFIED DENAVIT - HARTENBERG
(MDH) Parameters
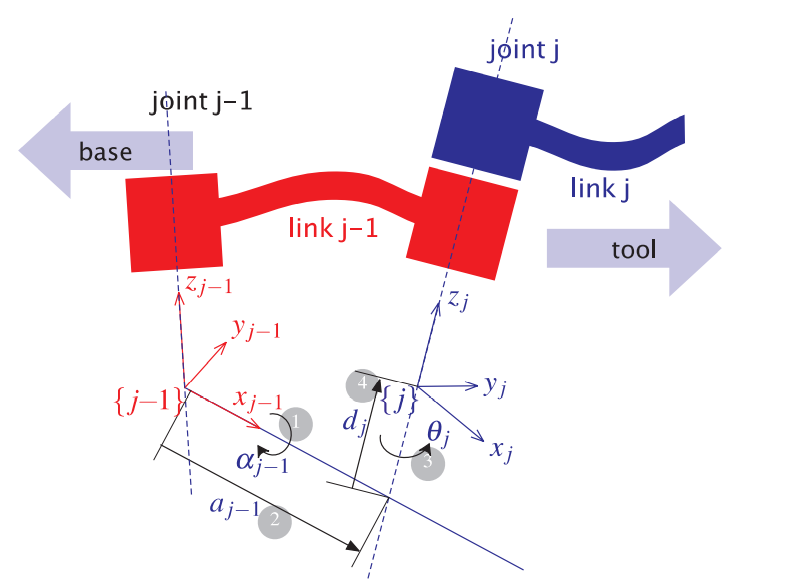
MODIFIED DENAVIT - HARTENBERG
(MDH) Parameters
Basic difference
MODIFIED DENAVIT - HARTENBERG
(MDH) Parameters
Basic difference
MODIFIED DENAVIT - HARTENBERG
(MDH) Parameters
The homogeneous transformation is represented as
19AIE201
Introduction to Robotics
Question 1
3R Spatial Robot
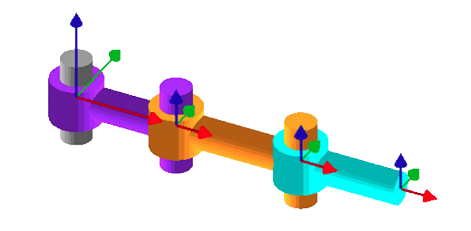
DH
MDH
19AIE201
Introduction to Robotics
Question 1
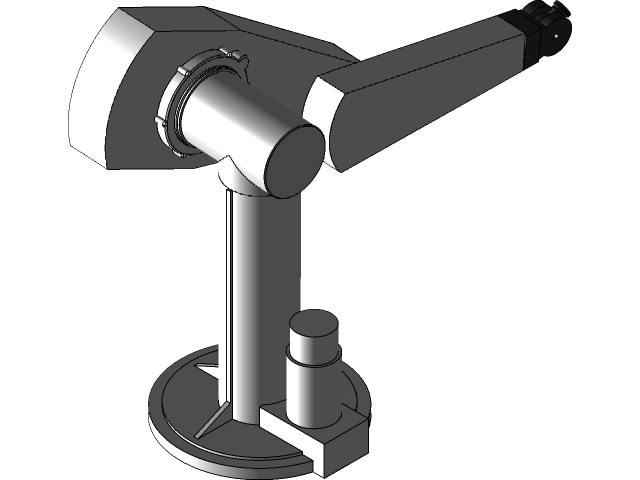
SCARA Robot

DH
MDH
19AIE201
Introduction to Robotics
Question 2
Even though obsolete, one of the famous and well-studied industrial robot arm is PUMA-560 by Unimation company. The MDH parameter calculation of PUMA-560 will be discussed in class. Calculate the standard DH parameter by hand for PUMA 560. Compare the DH and MDH parameter table with those obtained from python and matlab robotic toolbox. Do the forward kinematics operation of PUMA 560 for atleast 3 joint configurations of the robot.
19AIE201
Introduction to Robotics
Question 2
19AIE201
Introduction to Robotics
Question 2
DH
MDH
19AIE201
Introduction to Robotics
Question 3
Panda by Franka-Emika is a redundant (7R configuration) robot (short form for collaborative robot) like a human arm. Repeat the exercise in problem 3 for Panda robot as well.
DH
MDH
19AIE201
Introduction to Robotics
Question 4
- Do you think a seven axis robot like Panda is better than six axis robot like PUMA-560 in terms of operations. Do a detailed internet search and understand the advantages and disadvantages of using 6 vs 7 DOF robot. Split your group into two for the presentation of discussion of this problem, one subgroup should favour 6 DOF robot while the other should advocate for 7 DOF.
19AIE201
Introduction to Robotics
6 DOF Robots
- The robotic manipulator such as PUMA 560 which has 6of will be less Expensive when compared to 7DOF robots
- Since the number of degrees of freedom are less programming the robot becomes easy
- 6DOF robots operate faster when compared to 7DOF robots
- This kind of Robotic Manipulatore are used in assembly of automobile subcomponents
19AIE201
Introduction to Robotics
7 DOF Robots
- 7DOF Robot manipulatoire such as panda arm can do more complex moments as human arm compared 6dof manipulators
- This kind of robotic manipulators provides a narrow workspace
- It has High accurate contact recognition, interpretation and reaction
- This kind of Robotic manipulators are used for Curve welding