Deep Learning Networks & Gravitational Wave Signal Recognization
He Wang (王赫)
[hewang@mail.bnu.edu.cn]
Department of Physics, Beijing Normal University
In collaboration with Zhou-Jian Cao
Aug 23rd, 2019
The 23rd KAGRA face-to-face meeting @Toyama
- Problems
- Current matched filtering techniques are computationally expensive.
- Non-Gaussian noise limits the optimality of searches.
- Un-modelled signals?
A trigger generator \(\rightarrow\) Efficiency+ Completeness + Informative
Background
- Solution:
- Machine learning (deep learning)
- ...
Introduction
-
Existing CNN-based approaches:
- Daniel George & E. A. Huerta (2018)
- Hunter Gabbard et al. (2018)
- X. Li et al. (2018)
- Timothy D. Gebhard et al. (2019)
Related works
Introduction
- Our main contributions:
- A brand new CNN-based architecture (MF-CNN)
- Efficient training process (no bandpass and explicit whitening)
- Effective search methodology (only 4~5 days on O1)
- Fully recognized and predicted precisely (<1s) for all GW events in O1/O2
Motivation
MF-ConvNet Model
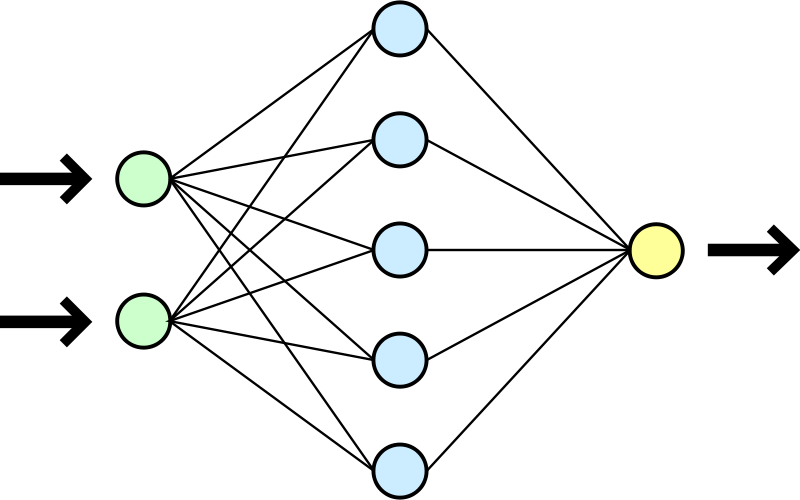
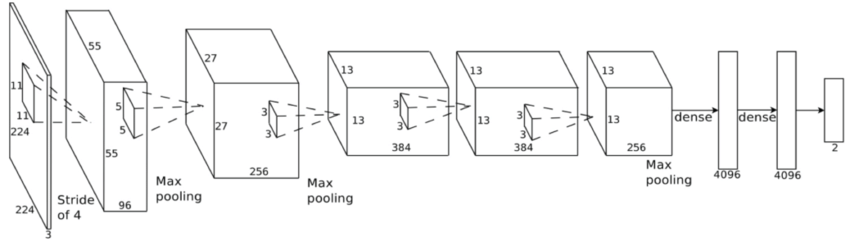
Convolutional neural network (ConvNet or CNN)
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012)
Matched-filtering (cross-correlation with the templates) can be regarded as a convolutional layer with a set of predefined kernels.
Is it matched-filtering?
Motivation
MF-ConvNet Model
Matched-filtering (cross-correlation with the templates) can be regarded as a convolutional layer with a set of predefined kernels.
- In practice, we use matched filters as an essential component in the first part of CNN for GW detection.
Convolutional neural network (ConvNet or CNN)
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012)
Architechture

\(\bar{S_n}(t)\)
MF-ConvNet Model
\(\bar{S_n}(t)\)
In the meanwhile, we can obtain the optimal time \(N_0\) (relative to the input) of feature response of matching by recording the location of the maxima value corresponding to the optimal template \(C_0\)
Architechture
MF-ConvNet Model
Experiments & Results
Dataset & Templates
| template | waveform (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (s) | 1 | 5 |
| equal mass |
- We use SEOBNRE model [Cao et al. (2017)] to generate waveform, we only consider circular, spinless binary black holes.
(In preprint)
- The background noises for training/testing are sampled from a closed set (33x4096s) in the first observation run (O1) in the absence of the segments (4096s) containing the first 3 GW events.
62.50M⊙ + 57.50M⊙ (\(\rho_{amp}=0.5\))
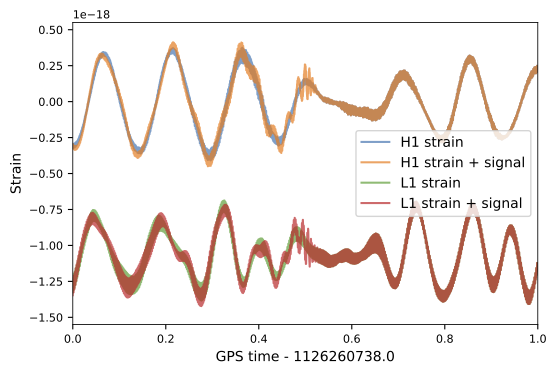
- A sample as input
Experiments & Results
Dataset & Templates
(In preprint)
| template | waveform (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (s) | 1 | 5 |
| equal mass |
- We use SEOBNRE model [Cao et al. (2017)] to generate waveform, we only consider circular, spinless binary black holes.
- The background noises for training/testing are sampled from a closed set (33x4096s) in the first observation run (O1) in the absence of the segments (4096s) containing the first 3 GW events.
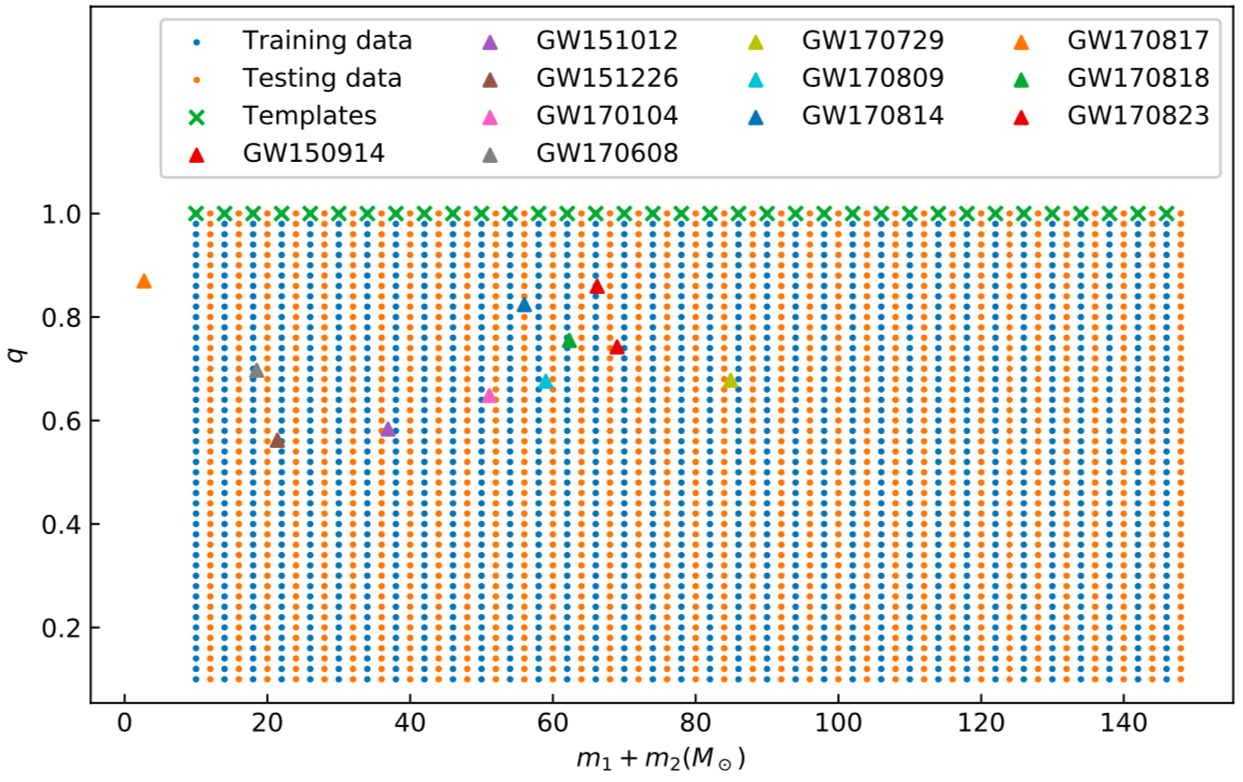
- Mass distribution of dataset / templates / events
Search methodology
Experiments & Results
(In preprint)
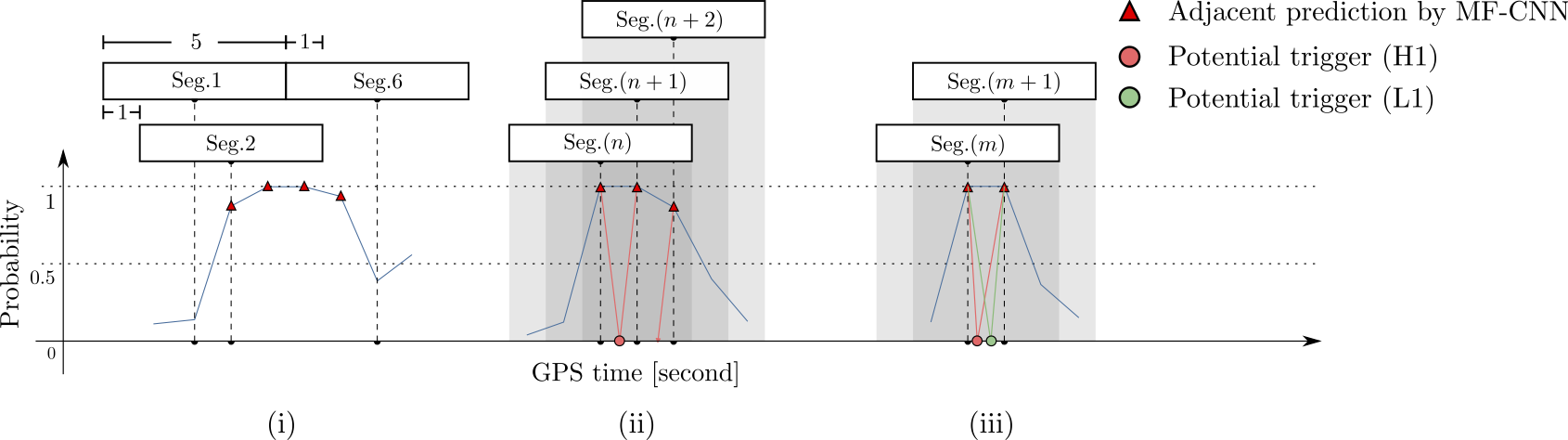
- Every 5 seconds segment as input of our MF-CNN with a step size of 1 second.
- The model can scan the whole range of the input segment and output a probability score.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
Search methodology
Experiments & Results
(In preprint)
Input
- Every 5 seconds segment as input of our MF-CNN with a step size of 1 second.
- The model can scan the whole range of the input segment and output a probability score.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
Experiments & Results
(In progress)
Population property on O1

-
Sensitivity estimation
- Background: using time-shifting on the closed set from real LIGO recordings in O1
- Injection: random simulated waveforms
Detection ratio
-
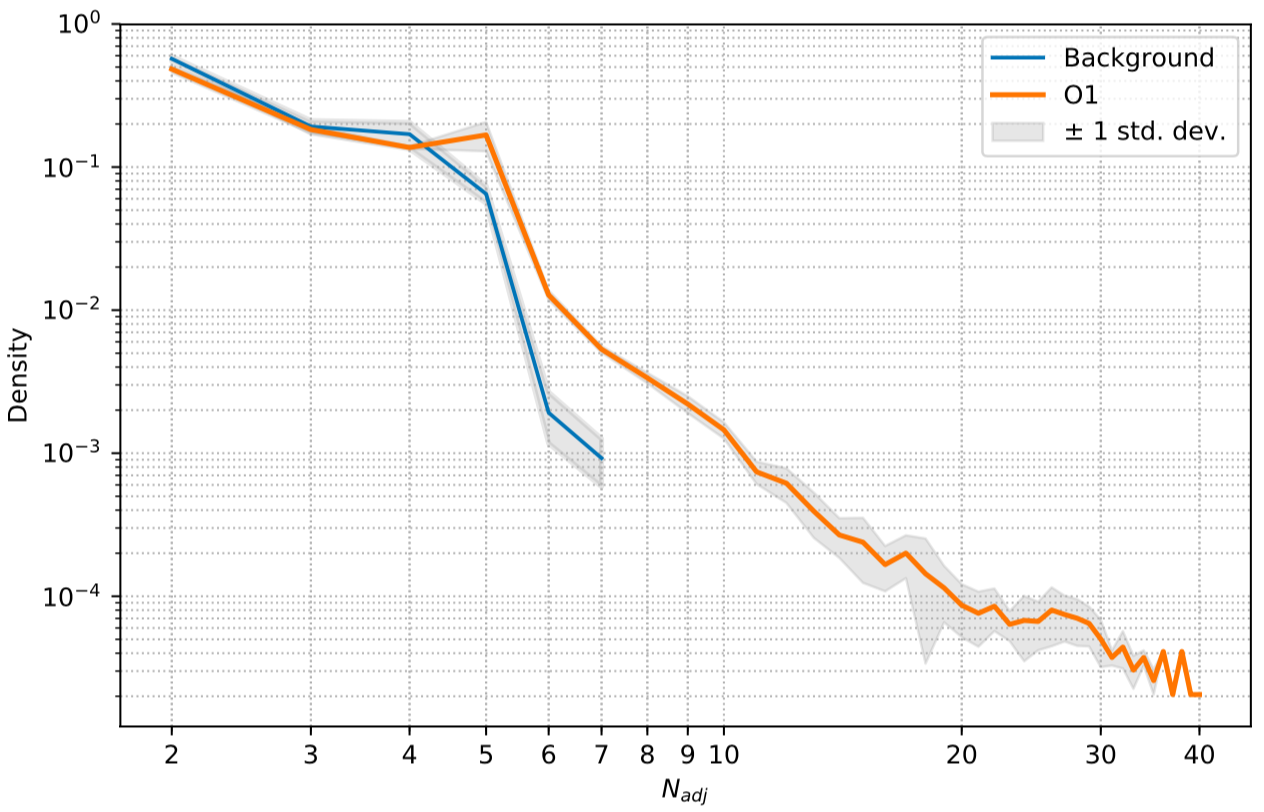
Statistical significance on O1
- Count a group of adjacent predictions as one "trigger block".
- For pure background (non-Gaussian), monotone trend should be observed.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
Number of Adjacent prediction
Experiments & Results
(In progress)
Population property on O1
-
Sensitivity estimation
- Background: using time-shifting on the closed set from real LIGO recordings in O1
- Injection: random simulated waveforms
Detection ratio
-
Statistical significance on O1
- Count a group of adjacent predictions as one "trigger block".
- For pure background (non-Gaussian), monotone trend should be observed.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
Number of Adjacent prediction
a bump at 5 adjacent predictions

Experiments & Results
(In preprint)
- Recovering all GW events in both O1 and O2

Experiments & Results
(In preprint)
- Recovering all GW events in both O1 and O2


Summary
-
Some benefits from MF-CNN architechure
-
Simple configuration for GW data generation
-
Almost no data pre-processing
- Works on non-stationary background
-
Easy parallel deployments, multiple detectors can be benefit a lot from this design
- More templates / smaller steps for searching can improve further
-
- Main understanding of the algorithms:
- GW templates are used as likely features for matching
- Generalization of both matched-filtering and neural networks
- Matched-filtering can be rewritten as convolutional neural layers
Summary
-
Some benefits from MF-CNN architechure
-
Simple configuration for GW data generation
-
Almost no data pre-processing
- Works on non-stationary background
-
Easy parallel deployments, multiple detectors can be benefit a lot from this design
- More templates / smaller steps for searching can improve further
-
- Main understanding of the algorithms:
- GW templates are used as likely features for matching
- Generalization of both matched-filtering and neural networks
- Matched-filtering can be rewritten as convolutional neural layers
Thank you for your attention!