Gravitational-wave Signal Recognition of LIGO Data by Deep Learning


He Wang (王赫)
Institute of Theoretical Physics, CAS
Beijing Normal University
on behalf of the KAGRA collaboration
7th KAGRA International Workshop , 15:45-16:05 Asia/Taipei on December 19\(^\text{th}\), 2020
Based on DOI: 10.1103/physrevd.101.104003
hewang@mail.bnu.edu.cn / hewang@itp.ac.cn
Collaborators:
Zhoujian Cao (BNU)
Shichao Wu (BNU)
Xiaolin Liu (BNU)
Jian-Yang Zhu (BNU)
Content
- Introduction
- Challenge & Opportunity
- Matched-filtering Convolutional Neural Network (MFCNN)
- Configuration & Search Strategy
- Results: GW events in O1/O2 & GWTC-2
- Summary & Lesson Learned
Gravitational-wave Astronomy
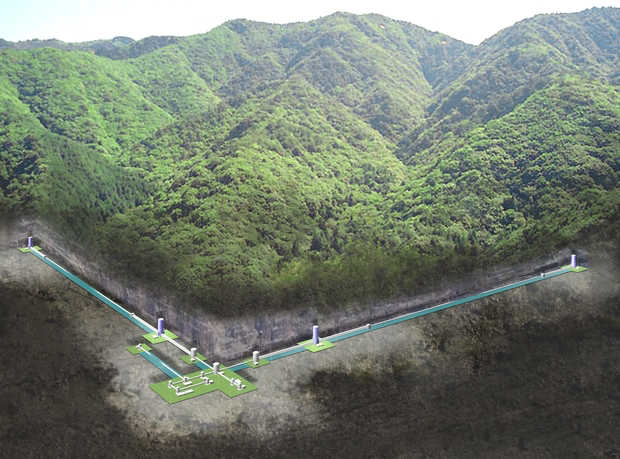
- Advanced LIGO observing since 2015 (two detectors in US), joined by Virgo (Italy) in 2017 and KAGRA (Japan) in Japan in 2020.
- Best GW hunter in the range 10Hz-10kHz.

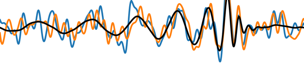
- 100 years from Einstein's prediction to the first LIGO-Virgo detection (GW150914) announcement in 2016.
- General relativity: "Spacetime tells matter how to move, and matter tells spacetime how to curve."
- Time-varying quadrupolar mass distributions lead to propagating ripples in spacetime: GWs.

LIGO Hanford (H1)
KAGRA
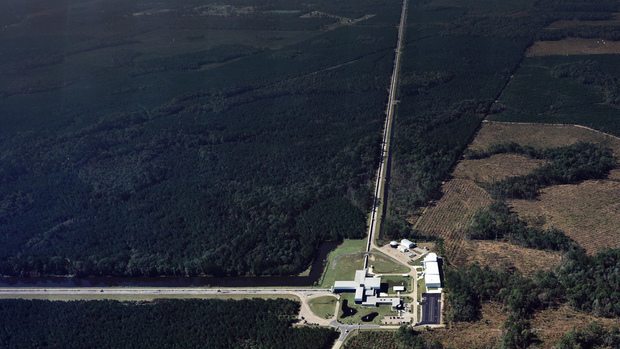
LIGO Livingston (L1)
Noise power spectral density (one-sided)
-
Matched-filtering Technique:
- It is an optimal linear filter for weak signals buried in the Gaussian and stationary noise \(n(t)\).
- Works by correlating a known signal model \(h(t)\) (template) with the data.
- Starting with data: \(d(t) = h(t) + n(t)\).
- Defining the matched-filtering SNR \(\rho(t)\):
where
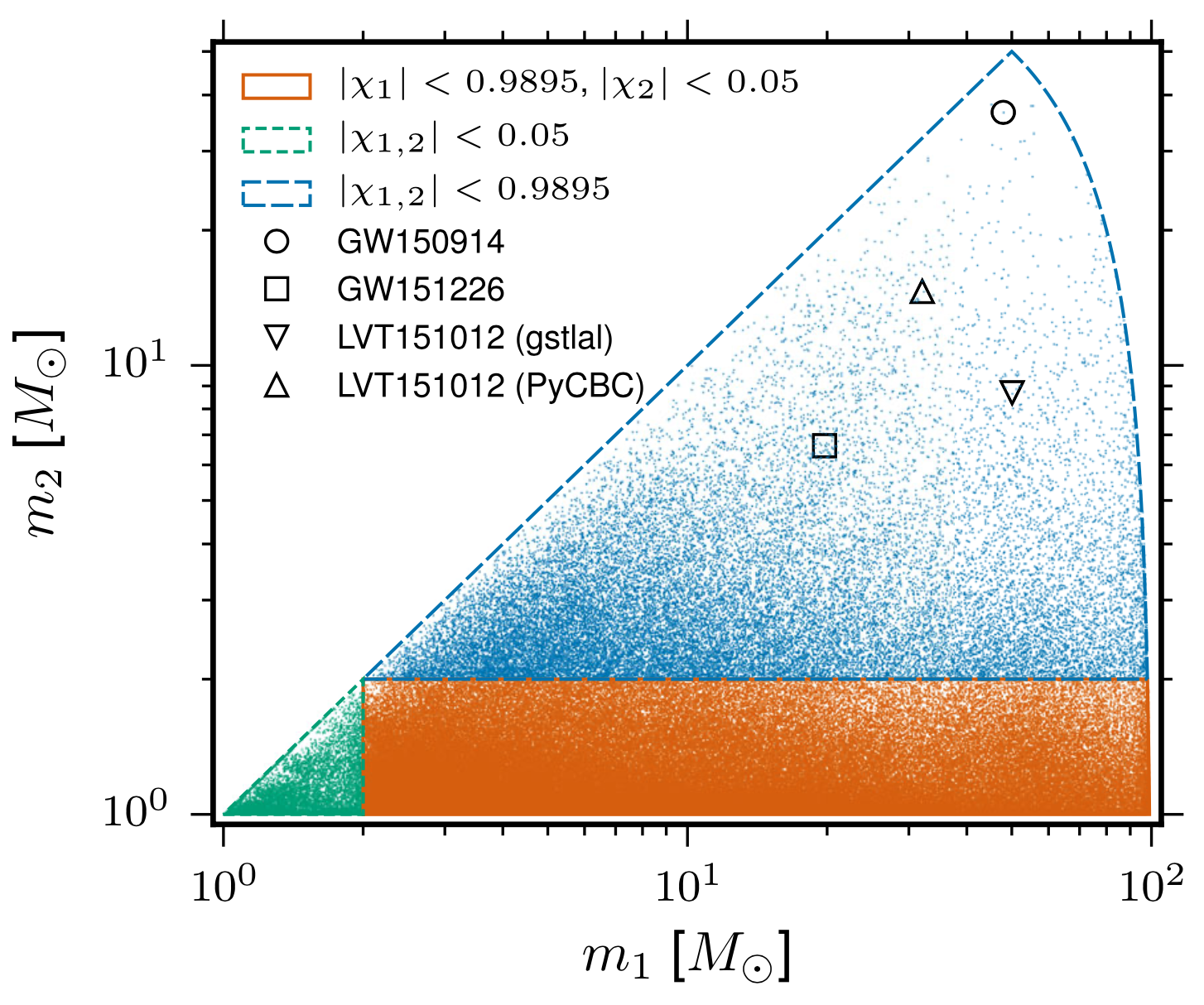
- The 4-D search parameter space in the first observation run covered by a template bank to circular binaries for which the spin of the systems is aligned (or antialigned) with the orbital angular momentum of the binary.
- ~250,000 template waveforms are used for O1 (computationally expansive).
The template that best matches GW150914 event
Challenges in GW Data Analysis
Opportunities in GW Data Analysis
-
Phys.Rev.D 97 (2018) 4, 044039
- The first attempt
-
Phys.Rev.Lett 120 (2019) 14, 141103
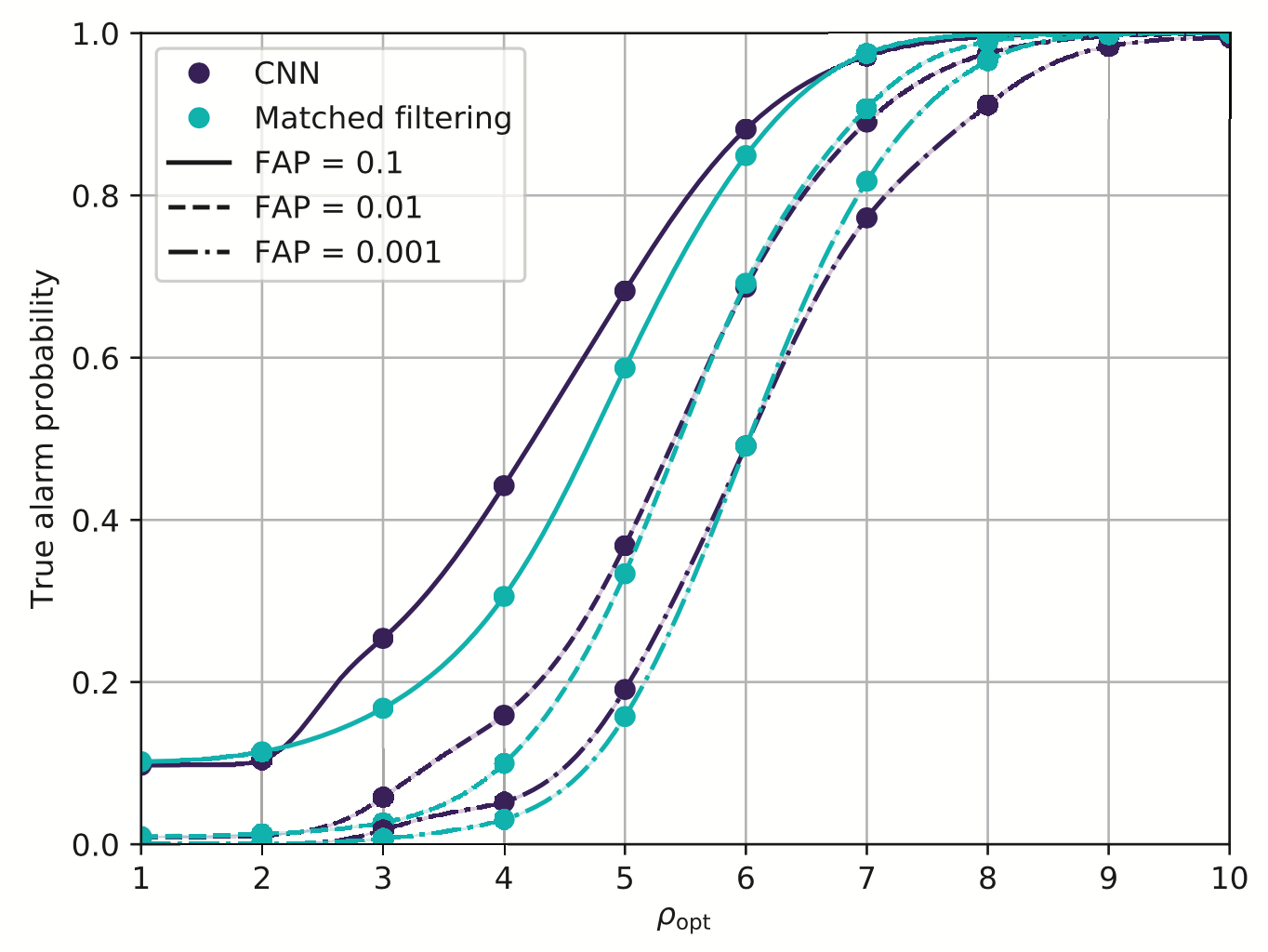
- Matched-filtering vs CNN
-
Phys.Rev.D 101, 083006 (2020)
- GstLAL vs DNN by ranking candidates...
-
Phys.Rev.D 100 (2019) 6, 063015
- GW events for BBH in GWTC-1
-
Phys.Rev.D 101 (2020) 10, 104003
- All GW events in GWTC-1
-
2007.04176
- Periods of 7 BBH events in O2
-
2010.15845
- GWTC-1 & GW190412, GW190521
-
2011.10425
- GWTC-1 & 34/37 in GWTC-2
Proof-of-principle studies
Production search studies
Milestones
More related works, see Survey4GWML (https://iphysresearch.github.io/Survey4GWML/)
- When machine & deep learning meets GW astronomy:
- Covering more parameter-space (Interpolation)
- Automatic generalization to new sources (Extrapolation)
-
Resilience to real non-Gaussian noise (Robustness)
-
Acceleration of existing pipelines (Speed, <0.1ms)
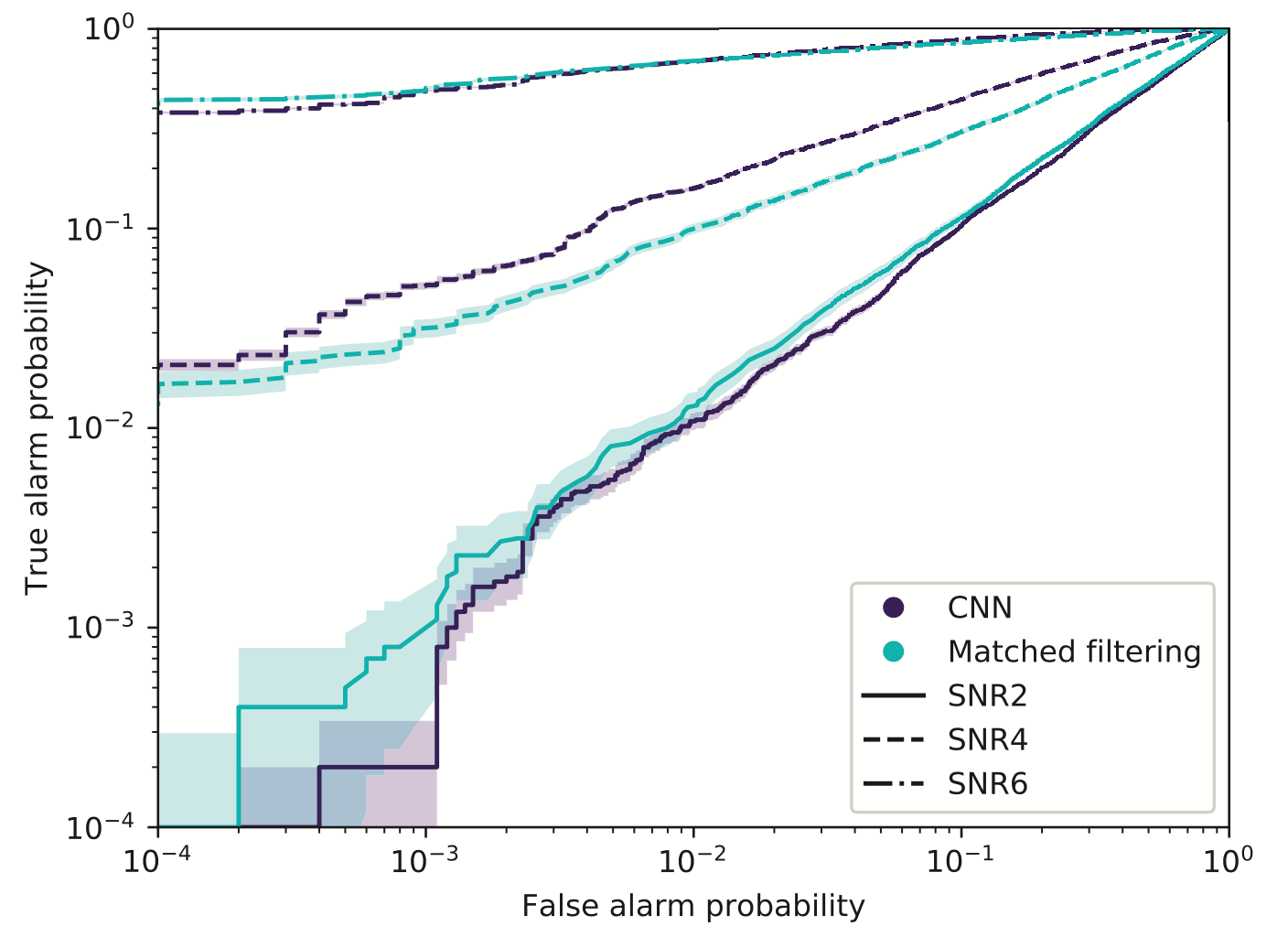
Stimulated background noises
- CNNs structure performs as well as the standard matched filter method in extracting BBH signals under non-ideal conditions.
Attempts on Real LIGO Noise

Classification
Feature extraction
- CNNs always works pretty good on stimulated noises.
- However, when on real noises from LIGO, this approach does not work that well.
- It's too sensitive against the background + hard to find GW events)
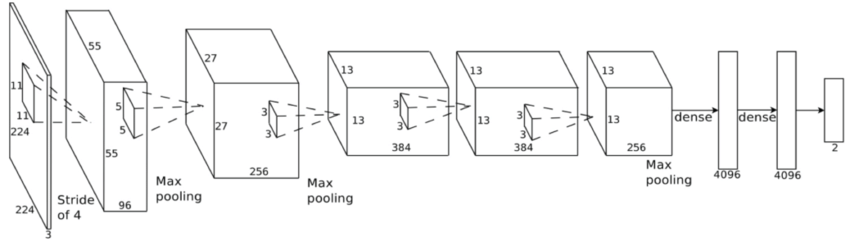
Convolutional Neural Network (ConvNet or CNN)
A specific design of the architecture is needed.
A specific design of the architecture is needed.
Classification
Feature extraction
Convolutional Neural Network (ConvNet or CNN)
- CNNs always works pretty good on stimulated noises.
- However, when on real noises from LIGO, this approach does not work that well.
- It's too sensitive against the background + hard to find GW events)
MFCNN
MFCNN
MFCNN
Attempts on Real LIGO Noise
Motivation
- With the closely related concepts between the templates and kernels , we attempt to address a question of:
Matched-filtering (cross-correlation with the templates) can be regarded as a convolutional layer with a set of predefined kernels.
>> Is it matched-filtering ?
>> Wait, It can be matched-filtering!
- In practice, we use matched filters as an essential component of feature extraction in the first part of the CNN for GW detection.
Classification
Feature extraction
Convolutional Neural Network (ConvNet or CNN)
Matched-filtering CNNs (MFCNN)
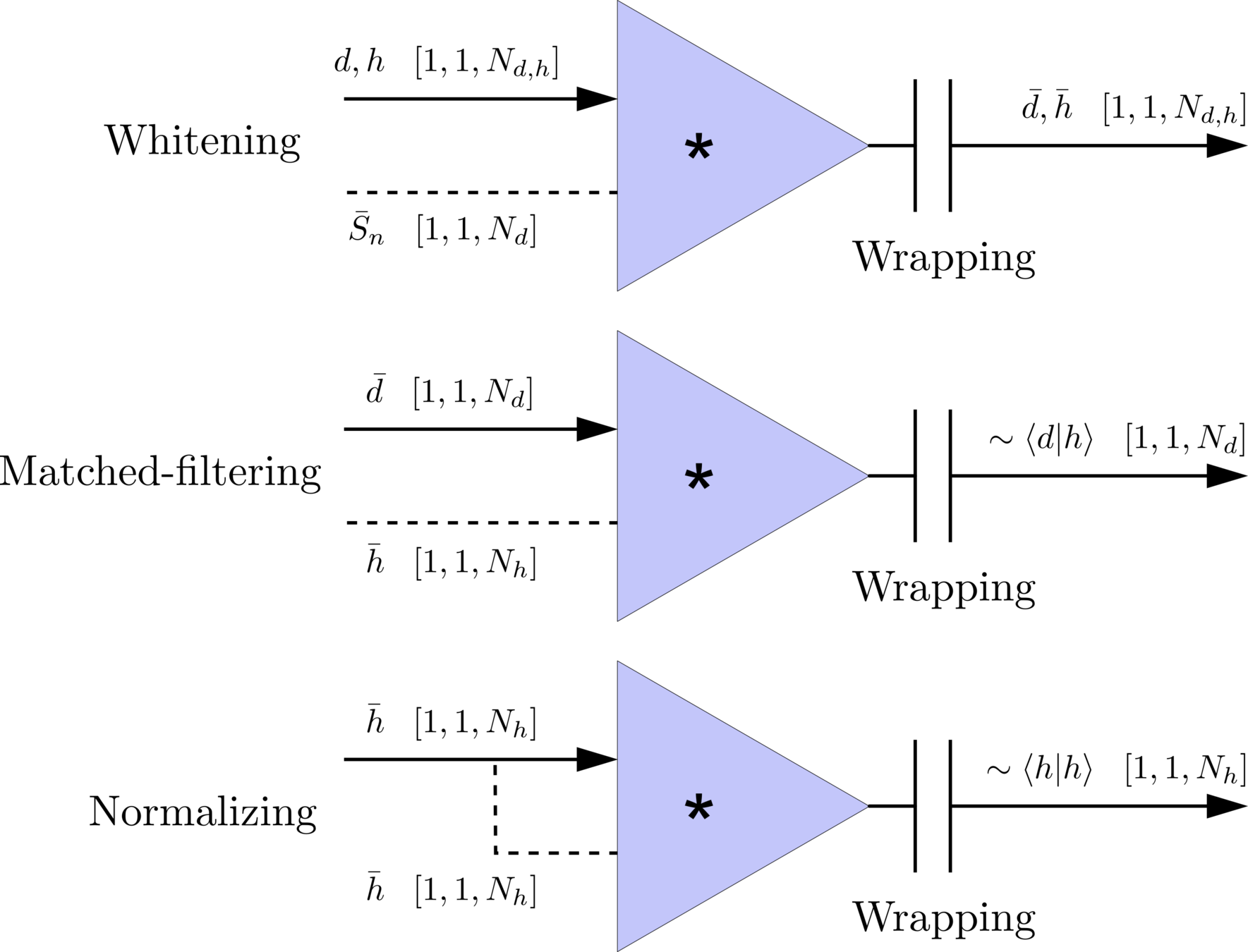
Frequency domain
- Transform matched-filtering method from frequency domain to time domain.
- The square of matched-filtering SNR for a given data \(d(t) = n(t)+h(t)\):
Matched-filtering CNNs (MFCNN)
\(S_n(|f|)\) is the one-sided average PSD of \(d(t)\)
(whitening)
where
Time domain
Frequency domain
(normalizing)
(matched-filtering)
- Transform matched-filtering method from frequency domain to time domain.
- The square of matched-filtering SNR for a given data \(d(t) = n(t)+h(t)\):
Matched-filtering CNNs (MFCNN)
\(S_n(|f|)\) is the one-sided average PSD of \(d(t)\)
(whitening)
where
Time domain
Frequency domain
(normalizing)
(matched-filtering)
- Transform matched-filtering method from frequency domain to time domain.
- The square of matched-filtering SNR for a given data \(d(t) = n(t)+h(t)\):
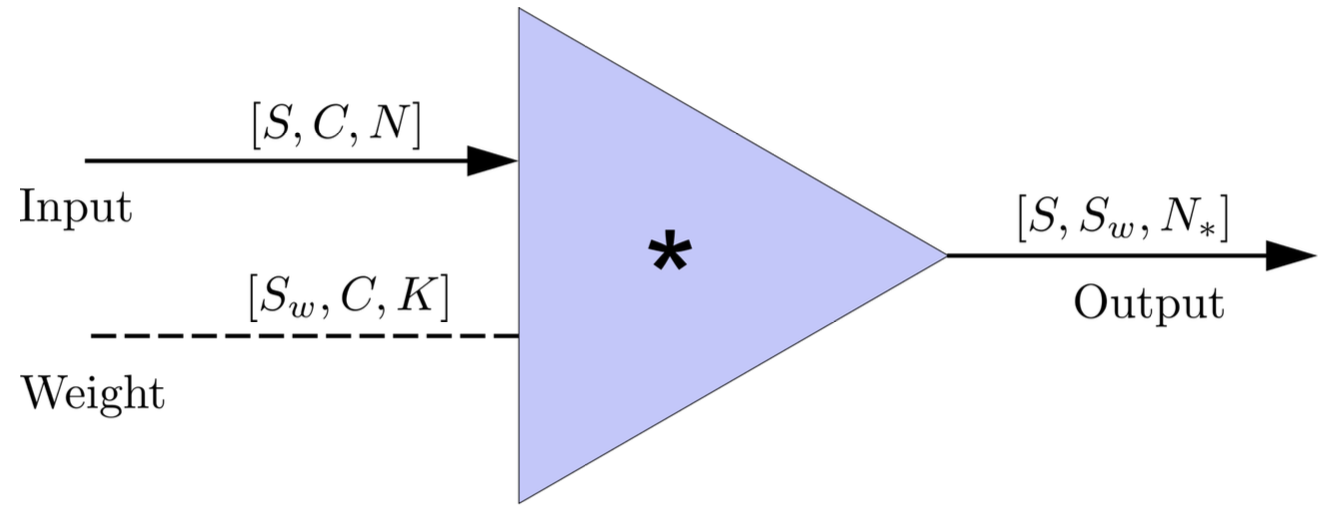
- In the 1-D convolution (\(*\)) on Apache MXNet, given input data with shape [batch size, channel, length] :
FYI: \(N_\ast = \lfloor(N-K+2P)/S\rfloor+1\)
(A schematic illustration for a unit of convolution layer)
Deep Learning Framework
Matched-filtering CNNs (MFCNN)
\(S_n(|f|)\) is the one-sided average PSD of \(d(t)\)
(whitening)
where
Time domain
Frequency domain
(normalizing)
(matched-filtering)
- Transform matched-filtering method from frequency domain to time domain.
- The square of matched-filtering SNR for a given data \(d(t) = n(t)+h(t)\):
Deep Learning Framework
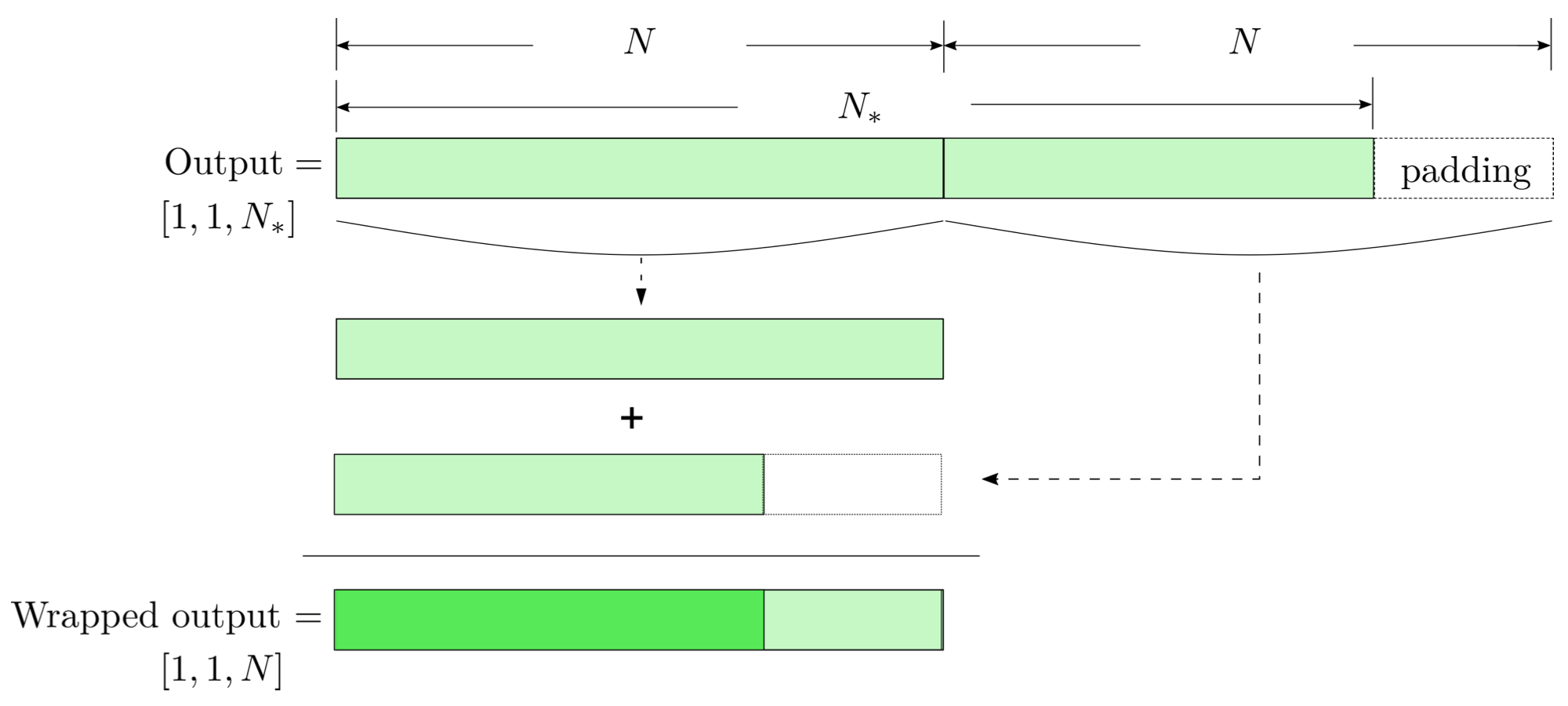
modulo-N circular convolution
Matched-filtering CNNs (MFCNN)
- The structure of MFCNN:
Input
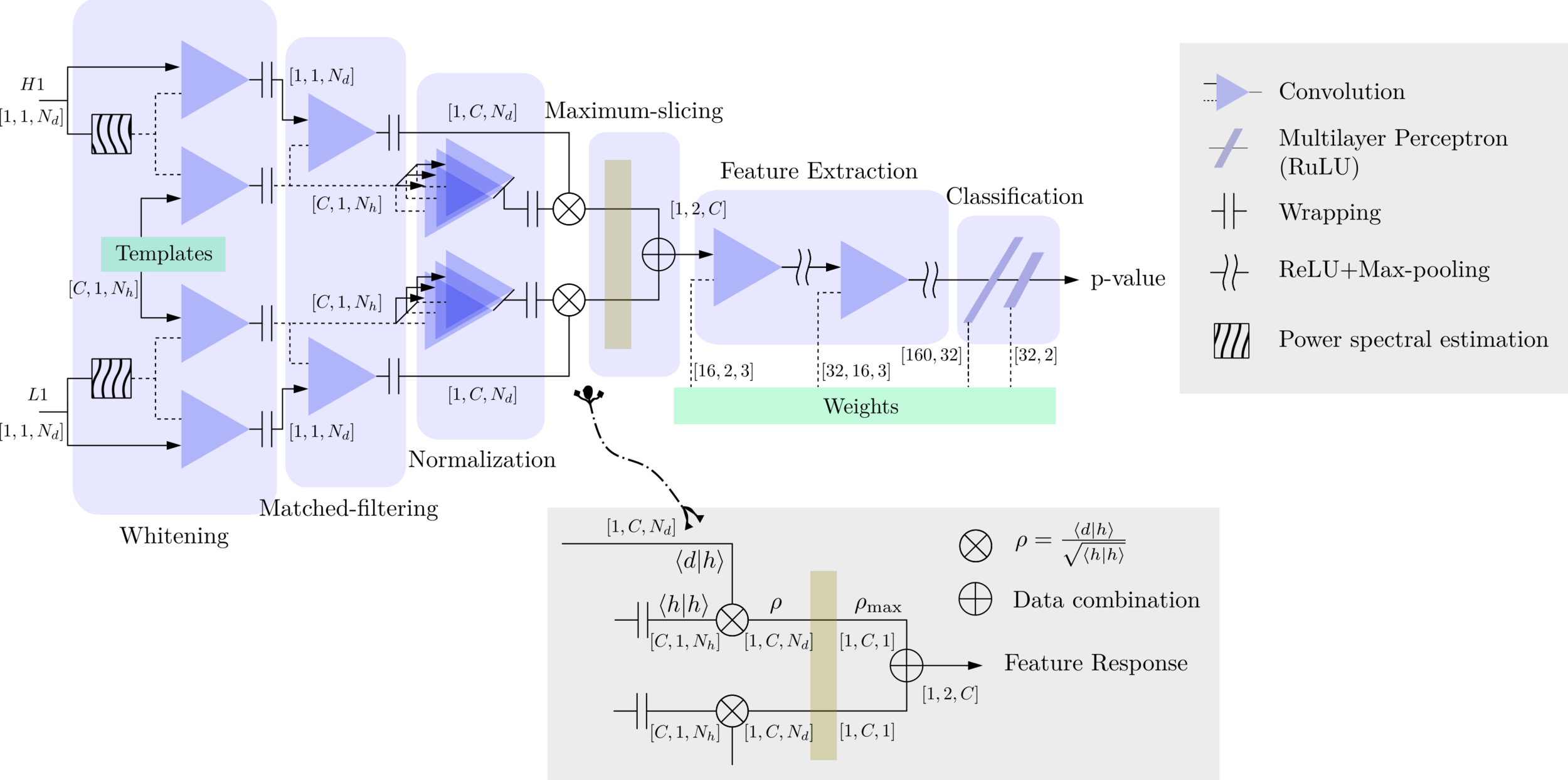
Output
Matched-filtering CNNs (MFCNN)
- The structure of MFCNN:
Input
Output
- In the meanwhile, we can obtain the optimal time \(N_0\) (relative to the input) of feature response of matching by recording the location of the maxima value corresponding to the optimal template \(C_0\).
Matched-filtering CNNs (MFCNN)
- The structure of MFCNN:
Input
Output
- In the meanwhile, we can obtain the optimal time \(N_0\) (relative to the input) of feature response of matching by recording the location of the maxima value corresponding to the optimal template \(C_0\).
import mxnet as mx
from mxnet import nd, gluon
from loguru import logger
def MFCNN(fs, T, C, ctx, template_block, margin, learning_rate=0.003):
logger.success('Loading MFCNN network!')
net = gluon.nn.Sequential()
with net.name_scope():
net.add(MatchedFilteringLayer(mod=fs*T, fs=fs,
template_H1=template_block[:,:1],
template_L1=template_block[:,-1:]))
net.add(CutHybridLayer(margin = margin))
net.add(Conv2D(channels=16, kernel_size=(1, 3), activation='relu'))
net.add(MaxPool2D(pool_size=(1, 4), strides=2))
net.add(Conv2D(channels=32, kernel_size=(1, 3), activation='relu'))
net.add(MaxPool2D(pool_size=(1, 4), strides=2))
net.add(Flatten())
net.add(Dense(32))
net.add(Activation('relu'))
net.add(Dense(2))
# Initialize parameters of all layers
net.initialize(mx.init.Xavier(magnitude=2.24), ctx=ctx, force_reinit=True)
return netThe available codes: https://gist.github.com/iphysresearch/a00009c1eede565090dbd29b18ae982c
1 sec duration
35 templates used
Training Configuration and Search Methodology
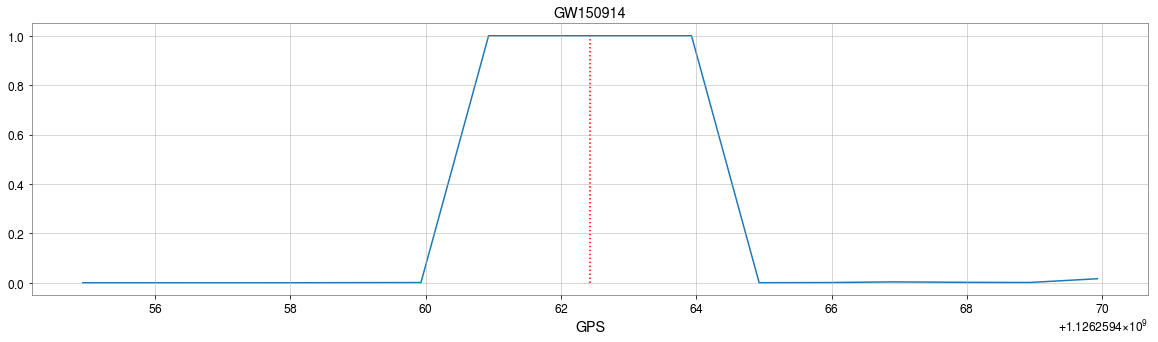
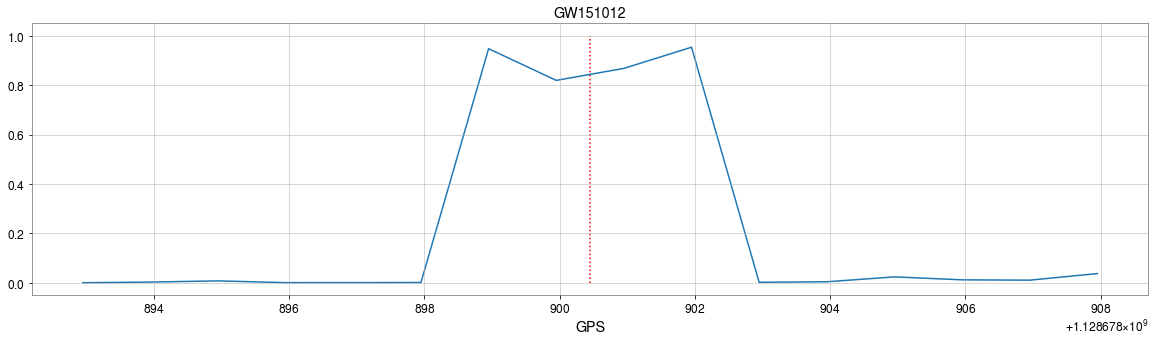
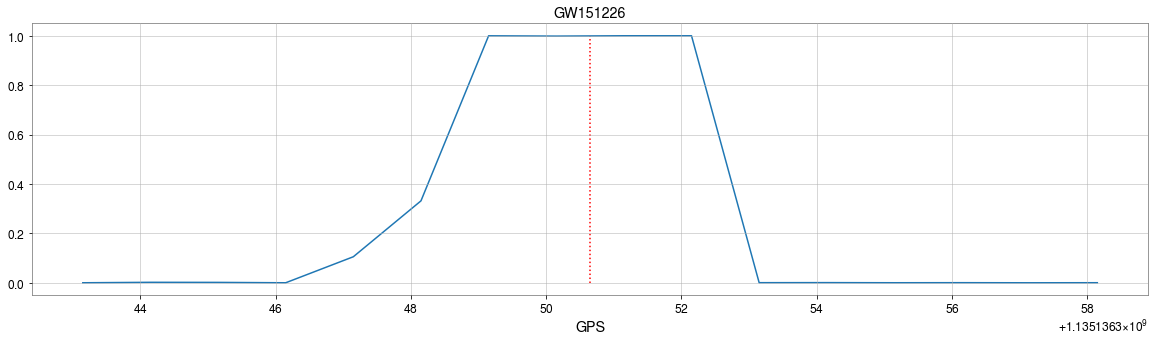
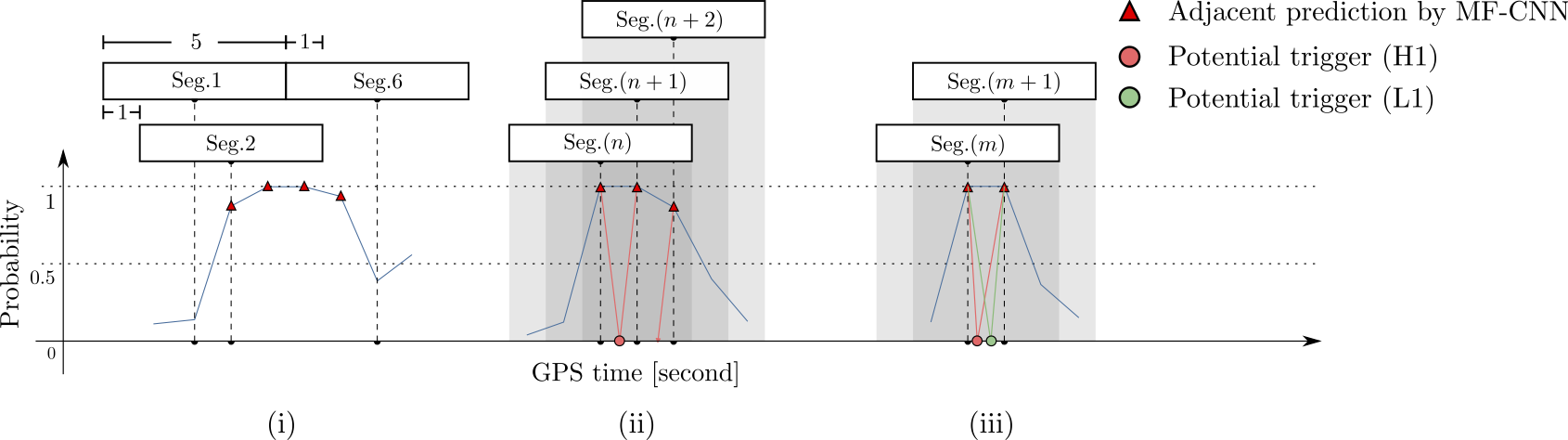
- Every 5 seconds segment as input of our MF-CNN with a step size of 1 second.
- The model can scan the whole range of the input segment and output a probability score.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
FYI: sampling rate = 4096Hz
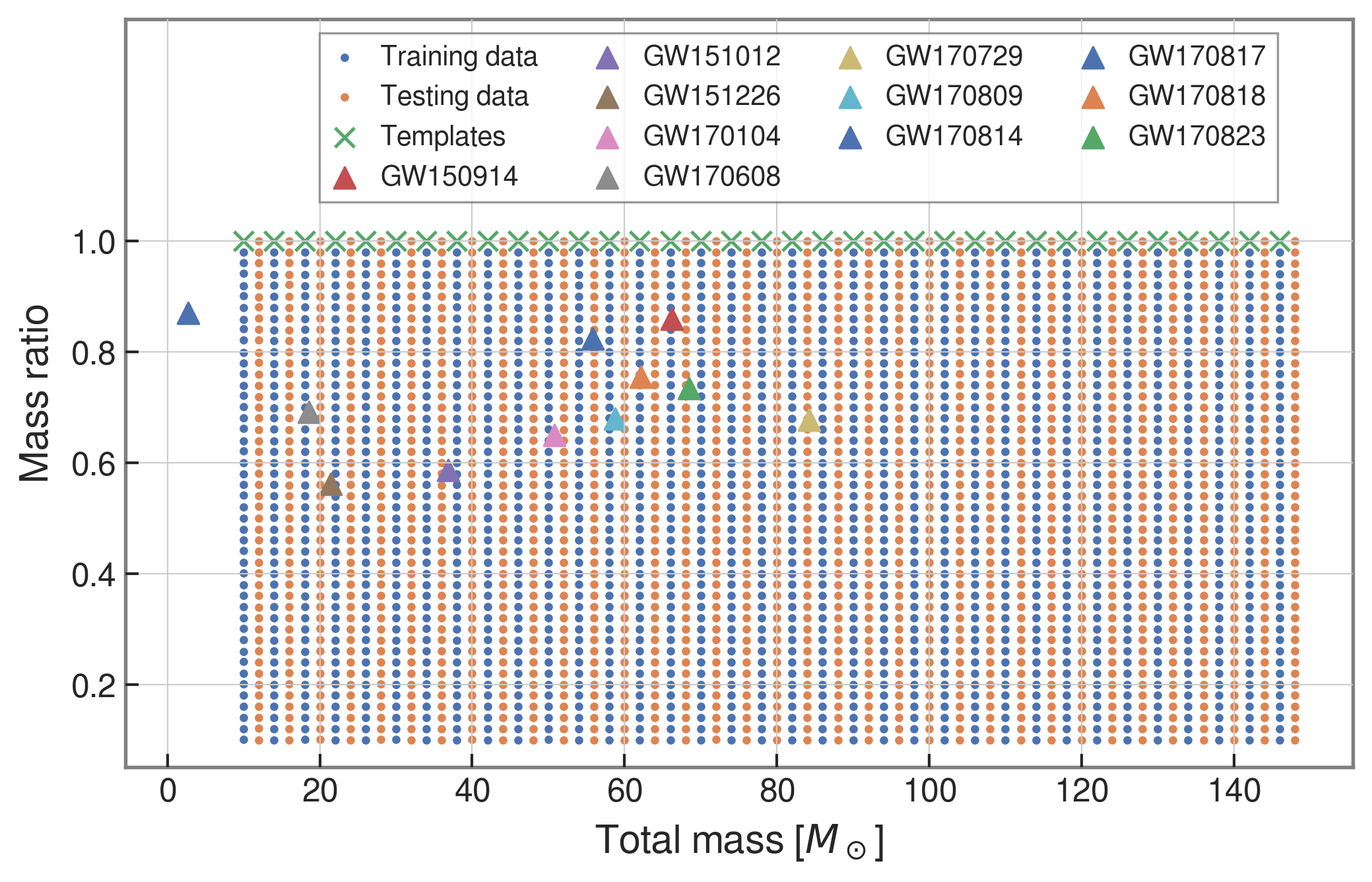
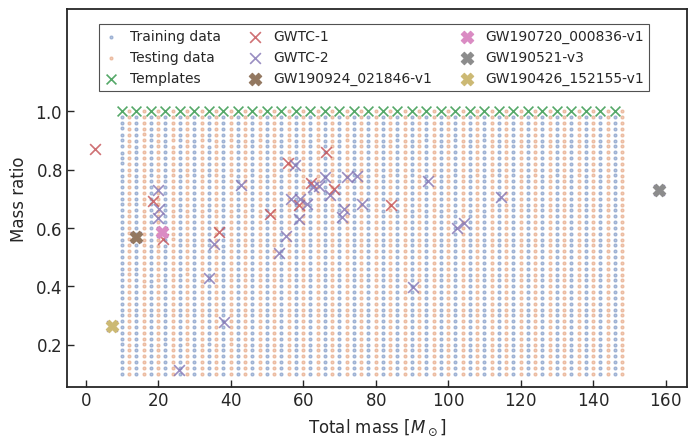
- We use SEOBNRE model [Cao et al. (2017), Liu et al. (2020)] to generate waveform, we only consider circular, spinless binary black holes.
- The background noises for training/testing are sampled from a small closed set (33*4096s) in the first observation run (O1) in the absence of the segments (4096s) containing the first 3 GW events.
| templates | waveforms (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (sec) | 1 | 5 |
| equal mass |
Training Configuration and Search Methodology
- We use SEOBNRE model [Cao et al. (2017), Liu et al. (2020)] to generate waveform, we only consider circular, spinless binary black holes.
- The background noises for training/testing are sampled from a small closed set (33*4096s) in the first observation run (O1) in the absence of the segments (4096s) containing the first 3 GW events.
- Every 5 seconds segment as input of our MF-CNN with a step size of 1 second.
- The model can scan the whole range of the input segment and output a probability score.
- In the ideal case, with a GW signal hiding in somewhere, there should be 5 adjacent predictions for it with respect to a threshold.
FYI: sampling rate = 4096Hz
| templates | waveforms (train/test) | |
|---|---|---|
| Number | 35 | 1610 |
| Length (sec) | 1 | 5 |
| equal mass |
input
Result: GW events in O1/O2 & GWTC-2
- Recovering the three GW events in O1.
- Recovering all GW events in O2, even including GW170817 event.


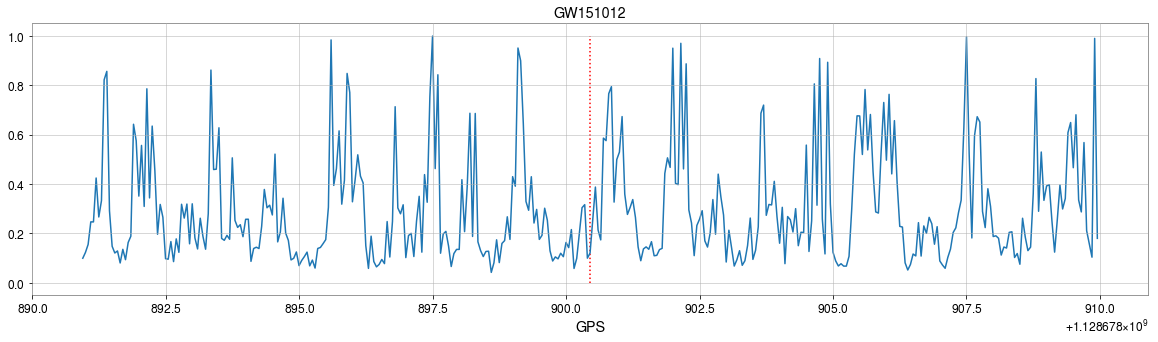
Result: GW events in O1/O2 & GWTC-2
- Recovering the three GW events in O1.
- Recovering all GW events in O2, even including GW170817 event.


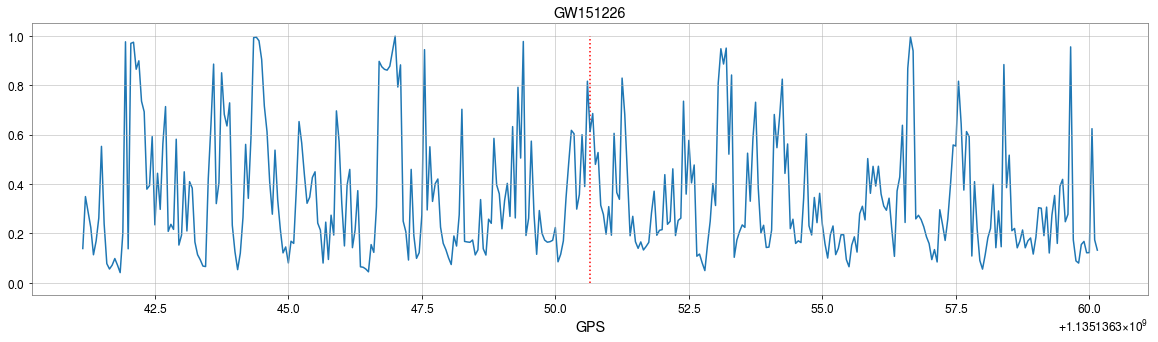
Result: GW events in O1/O2 & GWTC-2
- Recovering the three GW events in O1.
- Recovering all GW events in O2, even including GW170817 event.
- (Some results on statistical significance on O1 data & glitches identification have skipped here)
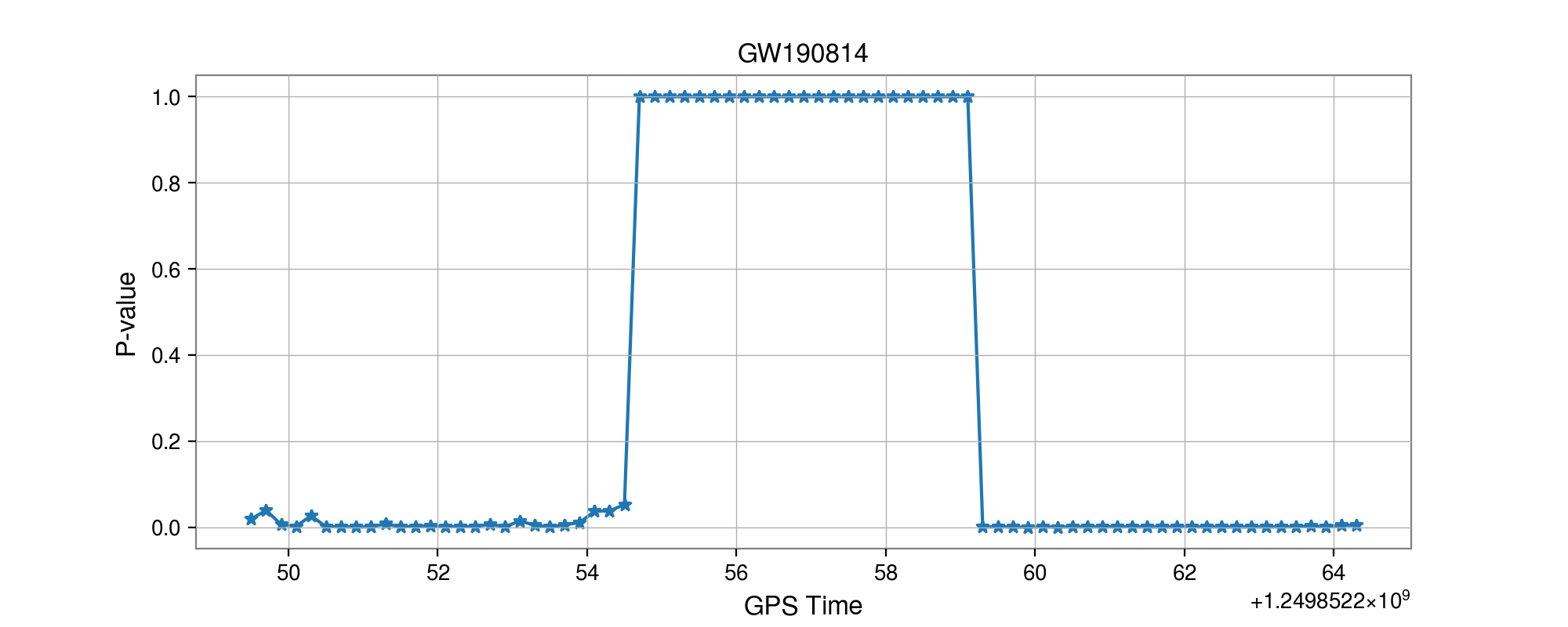
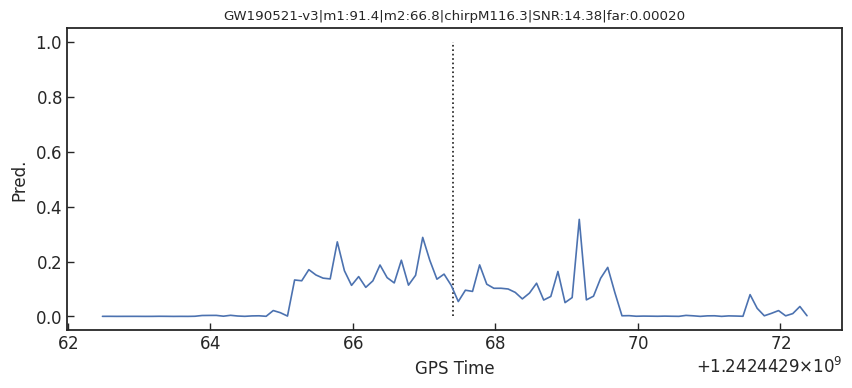
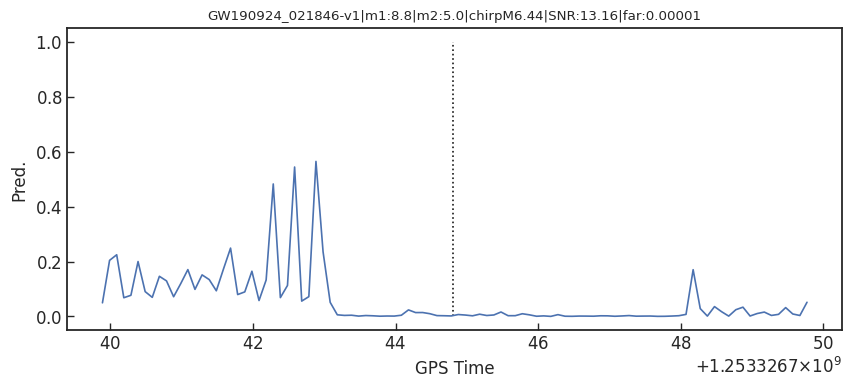
- Consider 33 events (with H1 detector data) in O3a (39 events in total), 4 of them are misclassified.
GW170817
GW190814
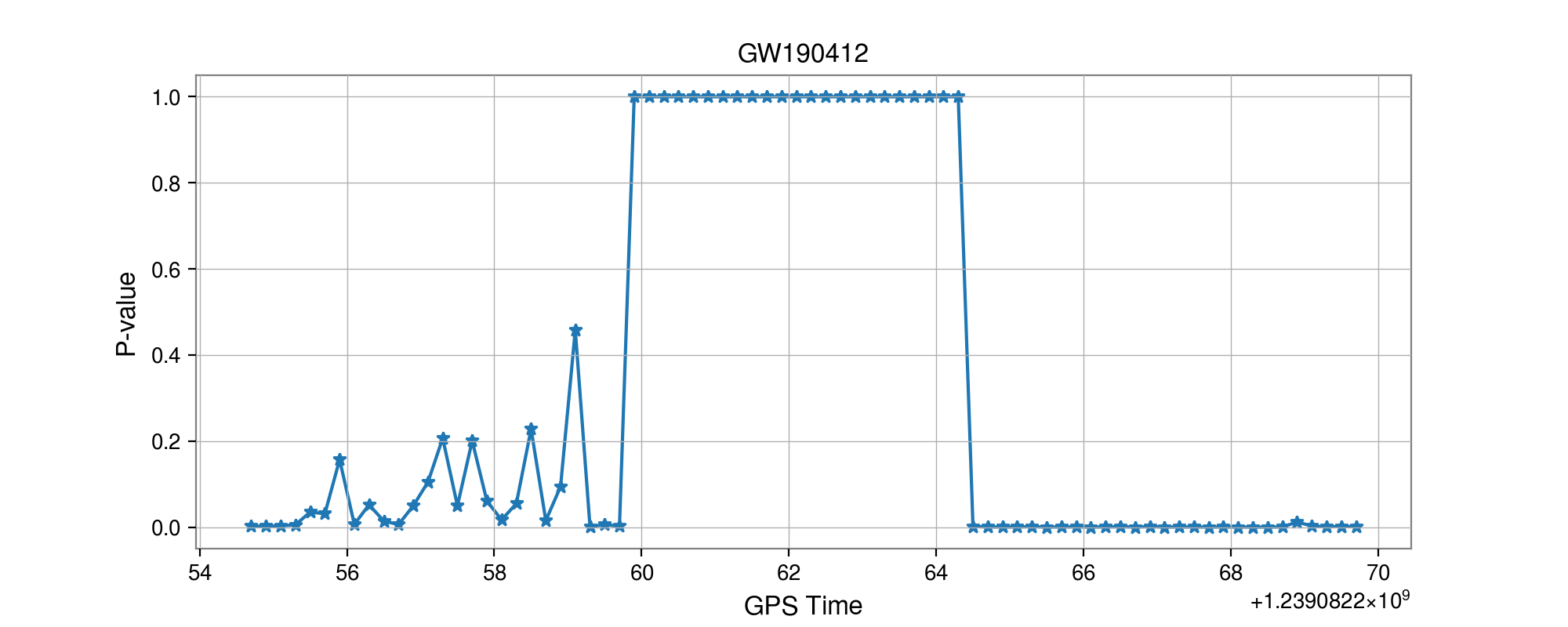
GW190412
- Selected:


Summary & Lesson Learned
- Some benefits from MFCNN architecture for GW detection:
- Simple configuration for GW data generation and almost no data pre-processing.
- It works on a non-stationary background.
- Easy parallel deployments, multiple detectors can benefit a lot from this design.
- Efficient searching with a fixed window.
- Recovering all GW events in GWTC-1 and 29 of 33 GW events in GWTC-2 (39 events in total).
- We realized that:
- GW templates can be used as likely known features for signal recognition.
- Generalization of both matched-filtering and neural networks.
- Linear filters (i.e. matched-filtering) in signal processing can be rewritten as neural layers (i.e. CNNs).
Summary & Lesson Learned
- The output of neural network (Softmax function) is not an optimal and reasonable detection statistic.
- "The negative log-likelihood cost function always strongly penalizes the most active incorrect prediction."
And the correctly classified examples will contribute little to the overall training cost.
—— I. Goodfellow, Y. Bengio, A. Courville. Deep Learning. - Need more efforts to think about how to model a reliable, reasonable and trusted algorithm to recognize GW signal.
- "The negative log-likelihood cost function always strongly penalizes the most active incorrect prediction."
- With optimal linear matched-filtering method, is there exist an optimal way to search weak signals by non-linear filter in real LIGO recordings?
- Based on deep Learning technique, more efforts focus on building a non-linear neural network outperforming matched-filtering techniques.
- or based on signal processing theory, is it possible to propose a better and effective non-linear filtering method, inspired by deep learning?
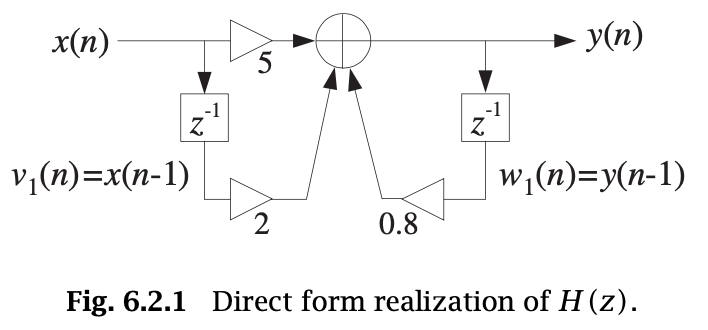
An example of transfer function:
CNN
RNN

Softmax function:
Score
Pred.
Summary & Lesson Learned
- The output of neural network (Softmax function) is not an optimal and reasonable detection statistic.
- "The negative log-likelihood cost function always strongly penalizes the most active incorrect prediction."
And the correctly classified examples will contribute little to the overall training cost.
—— I. Goodfellow, Y. Bengio, A. Courville. Deep Learning. - Need more efforts to think about how to model a reliable, reasonable and trusted algorithm to recognize GW signal.
- "The negative log-likelihood cost function always strongly penalizes the most active incorrect prediction."
- With optimal linear matched-filtering method, is there exist an optimal way to search weak signals by non-linear filter in real LIGO recordings?
- Based on deep Learning technique, more efforts focus on building a non-linear neural network outperforming matched-filtering techniques.
- or based on signal processing theory, is it possible to propose a better and effective non-linear filtering method, inspired by deep learning?
This slide: https://slides.com/iphysresearch/kiw7
for _ in range(num_of_audiences):
print('Thank you for your attention! 🙏')A example of Transfer function:
Softmax function:
Pred.