Stochastic thermodynamics in uncertain environments
Jan Korbel & David Wolpert
CSH Workshop "Stochastic thermodynamics of complex systems" 30th September 2021
Slides available at: https://slides.com/jankorbel

Motivation

System
heat bath
prepared at
\(T_1\)
Typical experiment
heat bath
prepared at
\(T_2\)
work reservoir
Typical experiment

\(T\)
\(X\)
\(P(T)\)
\(X\)
3rd trial
\(T_3\)
\(X_3\)
...
In reality

Measure a quantity \(X\) and the temperature \(T\)
Temperature is measured with limited precision
In many experiments

- We do not know exact value of
- amount of heat baths
- temperatures
- chemical potentials
- energy spectrum
- control protocol
- transition rates
- initial distribution
In real experiments, there is always some uncertainty about the system and its environment
Some aspects of thermodynamics with uncertain parameters have been discussed in connection with:
superstatistics (local equilibria varying in space/time)
$$ \bar{\pi}(E_i) = \int \mathrm{d} \beta f(\beta) \pi_\beta(E_i)$$
spin glasses & replica trick
$$\overline{\ln Z} = \lim_{n \rightarrow 0} \frac{\overline{Z}^n - 1}{n}$$
Related approaches
Stochastic thermodynamics
Stochastic thermodynamics
1.) Consider linear Markov (= memoryless) with distribution \(p_i(t)\).
Its evolution is described by the master equation
$$ \dot{p}_t(x) = \sum_{x'} [K_{xx'} p_{t}(x') - K_{x'x} p_t(x) ]$$
\(K_{xx'}\) is transition rate.
2.) First law of thermodynamics - internal energy \( U = \sum_x p(x) u(x) \) then First law of thermodyanmics is
\(\dot{U} = \sum_x \dot{p}_t(x) u_t(x) + \sum_x p_t(x) \dot{u}_t(x) = \dot{Q} + \dot{W}\)
\(\dot{Q}\) - heat rate
\(\dot{W}\) - work rate
Stochastic thermodynamics
3.) Entropy of the system - Shannon entropy \(S = - \sum_x p_x \log p_x\). Equilibrium distribution is obtained by maximization of \(S\) under the constraint of average energy
$$ \pi(x) = \frac{1}{Z} \exp(- \beta u(x)) \quad \mathrm{where} \ \beta=\frac{1}{k_B T}, Z = \sum_x \exp(-\beta u(x))$$
4.) Detailed balance - stationary state (\(\dot{p}_t(x) = 0\) ) coincides with the equilibrium state \(\pi(x)\). We obtain
$$\frac{K_{xx'}}{K_{x'x}} = \frac{\pi(x)}{\pi(x')} = e^{\beta(u(x') - u(x))}$$
Note: Transition rate satisfying LDB
a.) General form of transition matrix satisfying detailed balance
Equilibrium distribution \(\pi\): \( K \pi = 0\)
Define: \(\Pi := diag(\pi)\)
DB condition: \(K \Pi = (K \Pi)^T \)
Decomposition: \( K = R \Pi^{-1} \), \(R\) - symmetric
Normalization: \( K = R \Pi^{-1} - diag (R \Pi^{-1} \cdot \mathbf{1}) \)
b.) General form of transition matrix satisfying LDB
$$K = \sum_{\nu=1}^N \left[ R^\nu (\Pi^\nu(\beta_\nu,\mu_\nu))^{-1} - diag (R^\nu \Pi^\nu(\beta_\nu,\mu_\nu))^{-1} \cdot \mathbf{1}\right]$$
Stochastic thermodynamics
5.) Second law of thermodynamics:
$$\dot{S} = - \sum_x \dot{p}_x \log p_x = \frac{1}{2} \sum_{xx'} \left[K_{xx'} p_t(x') - K_{x'x} p_t(x)\right] \log \frac{p_t(x')}{p_t(x)}$$
$$ =\underbrace{\frac{1}{2} \sum_{xx'} \left[K_{xx'} p_t(x') - K_{x'x} p_t(x)\right] \log \frac{K_{xx'} p_t(x')}{K_{x'x} p_t(x)}}_{\dot{\Sigma}} $$ $$+ \underbrace{\frac{1}{2} \sum_{xx'} \left[K_{xx'} p_t(x') - K_{x'x} p_t(x)\right] \log \frac{K_{x'x}}{K_{xx'}}}_{\dot{\mathcal{E}}}$$
\( \dot{\Sigma} \geq 0 \) entropy production rate (2nd law of TD)
\(\dot{\mathcal{E}} = \beta \dot{Q}\) entropy flow rate (connecting 1st and 2nd law quantities)
Stochastic thermodynamics
6.) Trajectory thermodynamics - consider stochastic trajectory
\(\pmb{x}= (x_0,t_0;x_1,t_1;\dots)\). Energy \(u_t(\pmb{x}) = u(\pmb{x}(t),\lambda(t))\)
\(\lambda(t)\) - control protocol
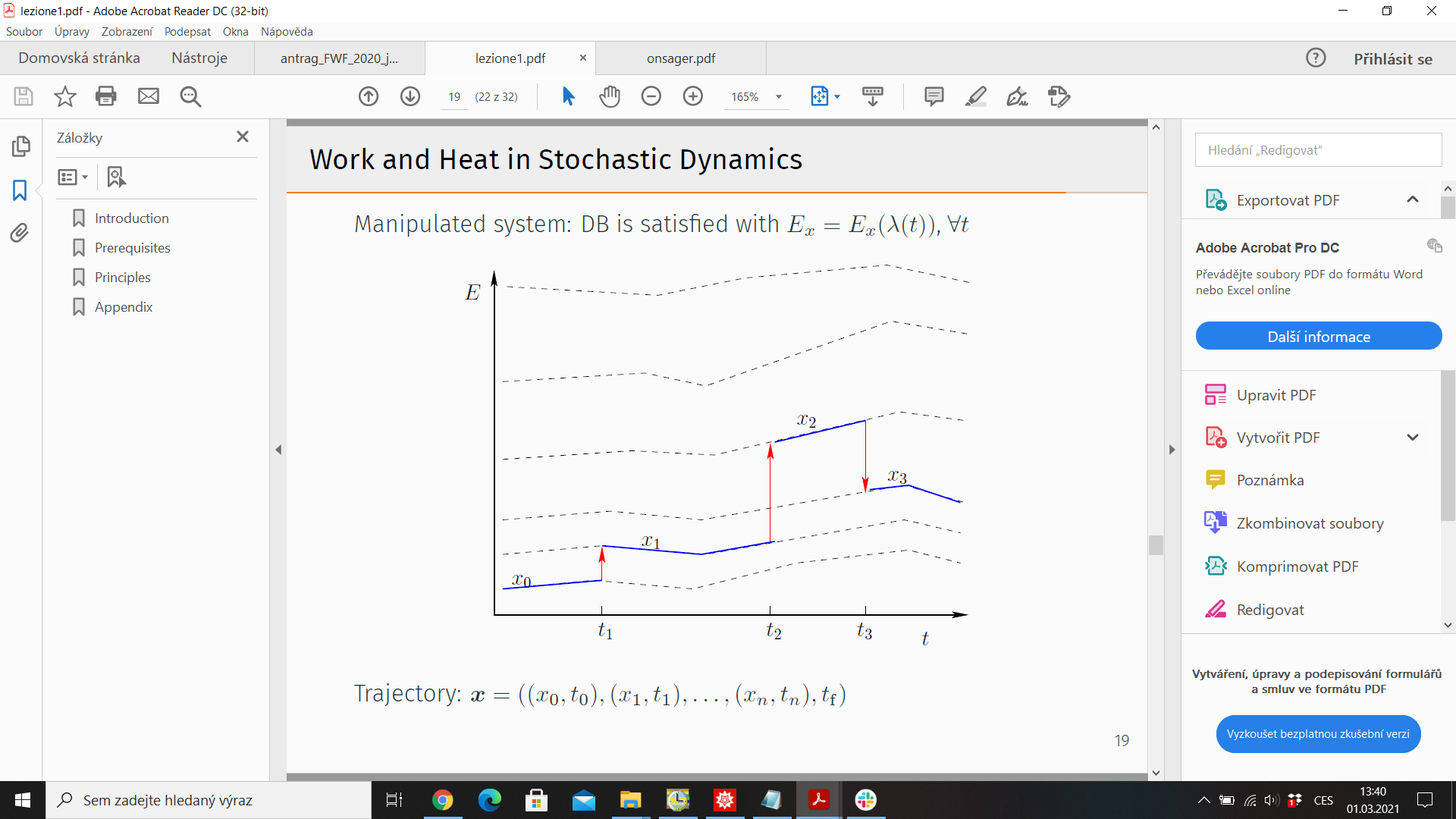
Probability of observing \( \pmb{x}\): \(\mathcal{P}(\pmb{x}\))
7.) Time reversal \(\tilde{\pmb{x}}(t) = \pmb{x}(T-t)\)
Reversed protocol \(\tilde{\lambda}(t) = \lambda(T-t)\)
Probability of observing reversed trajectory under reversed protocol \(\tilde{\mathcal{P}}(\tilde{\pmb{x}})\)
Stochastic thermodynamics
8.) Trajectory second law
Trajectory entropy: \(s_t(\pmb{x}) = - \log p_t(\pmb{x}(t)\))
Ensemble entropy: \(S_t = \langle s_t(\pmb{x}) \rangle_{\mathcal{P}(\pmb{x})} = \int \mathcal{D} \pmb{x} \mathcal{P}(\pmb{x}) s_t(\pmb{x})\)
Trajectory 2nd law \( \Delta s = \sigma + \epsilon\)
Trajectory EP: \(\sigma = \underbrace{\ln p_t(\pmb{x}(t)) - \ln p_0(\pmb{x}(0))}_{\Delta s} + \underbrace{\sum_{i=1}^M \ln \frac{K_{\pmb{x}_{T_i}\pmb{x}_{T_{i-1}}}}{\tilde{K}_{\pmb{x}_{T_{i-1}}\pmb{x}_{T_i}}}}_{-\epsilon}\)
Stochastic thermodynamics
9.) Detailed Fluctuation theorem
Relation to the trajectory probabilities
$$\log \frac{\mathcal{P}(\pmb{x})}{\tilde{\mathcal{P}}(\tilde{\pmb{x}})} = \sigma$$
Detailed fluctuation theorem (DFT)
$$\frac{P(\sigma)}{\tilde{P}(-\sigma)} = e^{\sigma}$$
10.) Integrated fluctuation theorem
By rearraning DFT we get \( P(\sigma) e^{-\sigma} = \tilde{P}(-\sigma)\)
By integrating over \(\sigma\), we obtain IFT
$$ \langle e^{- \sigma} \rangle = 1 \quad \stackrel{Jensen}{\Rightarrow} \langle \sigma \rangle = \Sigma \geq 0$$
2nd law is consequence of FTs!
Stochastic thermodynamics in uncertain environment
Thermodynamics of systems coupled to uncertain environment
- Consider a set of apparatuses \(\mathcal{A}\).
- For each apparatus \(\alpha \in \mathcal{A}\), we have a system with a precise number of baths, temperatures, chemical potentials, etc. satisfying local detailed balance
- We consider a probability distribution \(P^\alpha\) over the apparatuses
Effective value over the apparatuses can be defined as
$$ \overline{X}:= \int \mathrm{d} P^\alpha X^\alpha$$
Effective distribution \(\bar{p}_x(t)\) fulfills the equation
\( \dot{\bar{p}}_x(t) = \sum_{x'} \int \mathrm{d} P^\alpha K^\alpha_{xx'} p^\alpha_{x'}(t) \) which is generally non-Markovian
Effective ensemble stochastic thermodynamics
- Expected internal energy is \(\bar{U} = \int \mathrm{d} P^\alpha \sum_x p^\alpha_t(x) u^\alpha(x)\)
- Expected first law of thermodynamics
$$\dot{\bar{U}} = \dot{\bar{Q}} + \dot{\bar{W}}$$
- Expected ensemble entropy \(\bar{S} = - \sum_x \int \mathrm{d} P^\alpha p_t^\alpha(x) \ln p_t^\alpha(x)\)
- Expected second law of thermodynamics $$\dot{\bar{S}} = \dot{\bar{\Sigma}} + \dot{\bar{\mathcal{E}}}$$
- \(\dot{\bar{\Sigma}} \geq 0\)
- \(\dot{\bar{\mathcal{E}}} = \overline{\beta \dot{Q}}\) - no explicit relation between \(\dot{\bar{\mathcal{E}}}\) and \(\dot{\bar{Q}}\)
Effective trajectory stochastic thermodynamics
- Effective trajectory entropy is defined as \(\overline{s}_t(\pmb{x}) = - \overline{\log p_t(\pmb{x}(t)}\))
- Ensemble average \( \langle \overline{s}_t(\pmb{x})\rangle_{\overline{\mathcal{P}}(\pmb{x})} \neq \bar{S}_t \equiv \overline{\langle s^\alpha_t(\pmb{x}) \rangle_{\mathcal{P}^\alpha(\pmb{x})}}\)
- In general, ensemble average and effective averaging do not commute
- As a consequence, the fluctuation theorems do not hold for \(\overline{\sigma}\)
Decomposition of effective EP
Denote \(\mathcal{P}^\alpha(\pmb{x}) \equiv \mathcal{P}(\pmb{x}|\alpha)\) and \(\mathcal{P}(\pmb{x},\alpha) = \mathcal{P}(\pmb{x}|\alpha) P^\alpha\)
Effective ensemble EP \(\bar{\Sigma}\) can be expressed as $$\bar{\Sigma} = \int \mathrm{d} P^\alpha \mathcal{D} \pmb{x} \, \mathcal{P}^\alpha(\pmb{x}) \sigma^\alpha(\pmb{x}) = \int \mathrm{d} \alpha \mathcal{D} \pmb{x} P^\alpha \mathcal{P}^\alpha(\pmb{x}) \ln \frac{\mathcal{P}^\alpha(\pmb{x}) P^\alpha}{\tilde{\mathcal{P}}^\alpha(\tilde{\pmb{x}}) P^\alpha}$$
$$= D_{KL}(\mathcal{P}(\pmb{x},\alpha)||\tilde{\mathcal{P}}(\tilde{\pmb{x}},\alpha)) $$
By using chair rule for KL-divergence
$$D_{KL}(\mathcal{P}(\pmb{x},\alpha)||\tilde{\mathcal{P}}(\tilde{\pmb{x}},\alpha)) = D_{KL}(\mathcal{P}(\pmb{x})||\tilde{\mathcal{P}}(\tilde{\pmb{x}})) + D_{KL}(\mathcal{P}(\alpha|\pmb{x})||\tilde{\mathcal{P}}(\alpha|\tilde{\pmb{x}}))$$
where \(\mathcal{P}(\pmb{x}) = \int \mathrm{d} \alpha \, P^\alpha \mathcal{P}(\pmb{x}|\alpha) \equiv \bar{\mathcal{P}}(\pmb{x})\) and \(\mathcal{P}(\alpha|\pmb{x}) = \frac{\mathcal{P}(\pmb{x}|\alpha) P^\alpha}{\mathcal{P}(\pmb{x})}\)
Phenomenological EP
Phenomenological EP \(\underline{\Sigma} = D_{KL}(\mathcal{P}(\pmb{x})||\tilde{\mathcal{P}}(\tilde{\pmb{x}})) = \int \mathcal{D} \pmb{x} \mathcal{P}(\pmb{x}) \ln \frac{\mathcal{P}(\pmb{x})}{\tilde{\mathcal{P}}(\tilde{\pmb{x}})}\)
Phenomenological trajectory EP is \(\underline{\sigma} = \ln \frac{\mathcal{P}(\pmb{x})}{\tilde{\mathcal{P}}({\tilde{\pmb{x}}})}\)
It is straightforward to show that \(\underline{\sigma}\) fullfills detailed fluctuation theorem
$$ \frac{P(\underline{\sigma})}{\tilde{P}(-\underline{\sigma})} = e^{\underline{\sigma}}$$
Phenomenological EP describes thermodynamics for the case of expected probability
It is a lower bound for the effective EP: \(\overline{\Sigma} \geq \underline{\Sigma}\)
Inference EP
Inference EP \(\Omega = D_{KL}(\mathcal{P}(\alpha|\pmb{x})||\tilde{\mathcal{P}}(\alpha|\tilde{\pmb{x}})) = \int \mathrm{d} P^\alpha \mathcal{P}(\alpha|\pmb{x}) \ln \frac{\mathcal{P}(\alpha|\pmb{x})}{\tilde{\mathcal{P}}(\alpha|\tilde{\pmb{x}})}\)
Inference trajectory EP as \(\omega:= \sigma^\alpha - \underline{\sigma} = \ln \frac{\mathcal{P}(\alpha|\pmb{x})}{\tilde{\mathcal{P}}(\alpha|\tilde{\pmb{x}})}\)
We can also show that \(\omega\) fulfills Detailed FT:
$$\frac{P(\omega|\pmb{x})}{\tilde{P}(-\omega|\tilde{\pmb{x}})} = e^{\omega} $$
From Integrated FT, we obtain that \(\Omega_{\pmb{x}} = \langle \omega \rangle_{P(\omega|\pmb{x})} \geq 0\)
Interpretation: \(\Omega\) is the average rate of how much information we gain from Bayesian inference of \(P(\alpha)\) from observing \(\pmb{x}\)
Interpretation of phenomenological EP
Let us consider \(\pmb{x}_t\) as a part of trajectory \(\pmb{x}\) from 0 to t.
Define \(\underline{X}_t := \int \mathrm{d} \alpha \mathcal{P}(\alpha|\pmb{x}_t) X^\alpha\)
Then we can show that
$$\underline{\sigma} = \underbrace{\ln \underline{p}_t(x(t)) - \ln \underline{p}_0(x_0)}_{\Delta \underline{s}} + \underbrace{\sum_{i=1}^M \ln \frac{\underline{K}_{\pmb{x}_{T_i}\pmb{x}_{T_{i-1}}}}{\tilde{\underline{K}}_{\pmb{x}_{T_{i-1}} \pmb{x}_{T_i}}}}_{-\underline{\epsilon}} $$
We can effectively treat the non-Markovian model with uncertain \(\alpha\) as Markovian model with trajectory-dependent distribution \(\mathcal{P}(\alpha|\pmb{x}_t)\)
Example:
two-state system with uncertain temperature
Two-state CTMC with unknown temperature
\(E_0\)
\(E_1\)
consider \(E_1 > E_0\)
Consider transition rates:
\(K_{0 \rightarrow 1} = e^{-\beta(E_0-E_1)/2}\)
\(K_{1 \rightarrow 0} = e^{-\beta(E_1-E_0)/2}\)
The rates satisfy detailed balance
Let us assume that we do not know the inv. temperature \(\beta\)
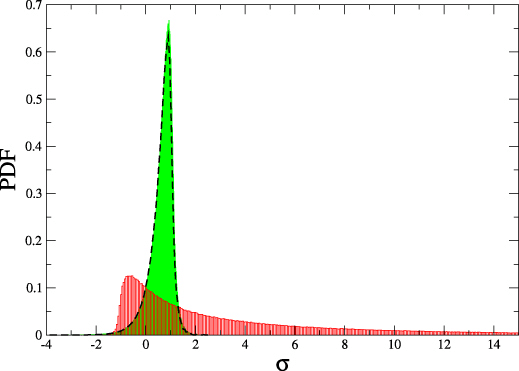
Two-state CTMC with unknown temperature
We observe a trajectory \(\pmb{x}\)
According to the waiting times, we can calculate \(\mathcal{P}(\beta|\pmb{x}_t)\) for times
\(t = \{T_1,T_2,T_3\}\)

Updating of \(P(\beta) \mapsto P(\beta|\pmb{x}_t)\)
from observing \(\pmb{x}_t\)
Text
True value: \(\beta^\star = 1\)

Updating of \(P(\beta) \mapsto P(\beta|\tilde{\pmb{x}}_t)\)
from reversed dynamics

Trajectory Inference EP

\(\Omega_{\pmb{x}_t}\) increases in time
There is more!
- Maximal work extractions with uncertain temperatures
- Dynamic of the thermodynamic value of information
Possible extensions:
- Systems with uncertain energy spectrums
- Experiments with uncertain control protocols
- Complete analysis of maximal work extraction to reach a target distribution with a given probability measure, both when one can specify aspects of the evolution (e.g., a quenching Hamiltonian) and when one can only specify it up to a given precision.
Thanks!