Lorenz Attractor in GeoGebra
First of all
First of all
we need to know the equations
System of differential equations
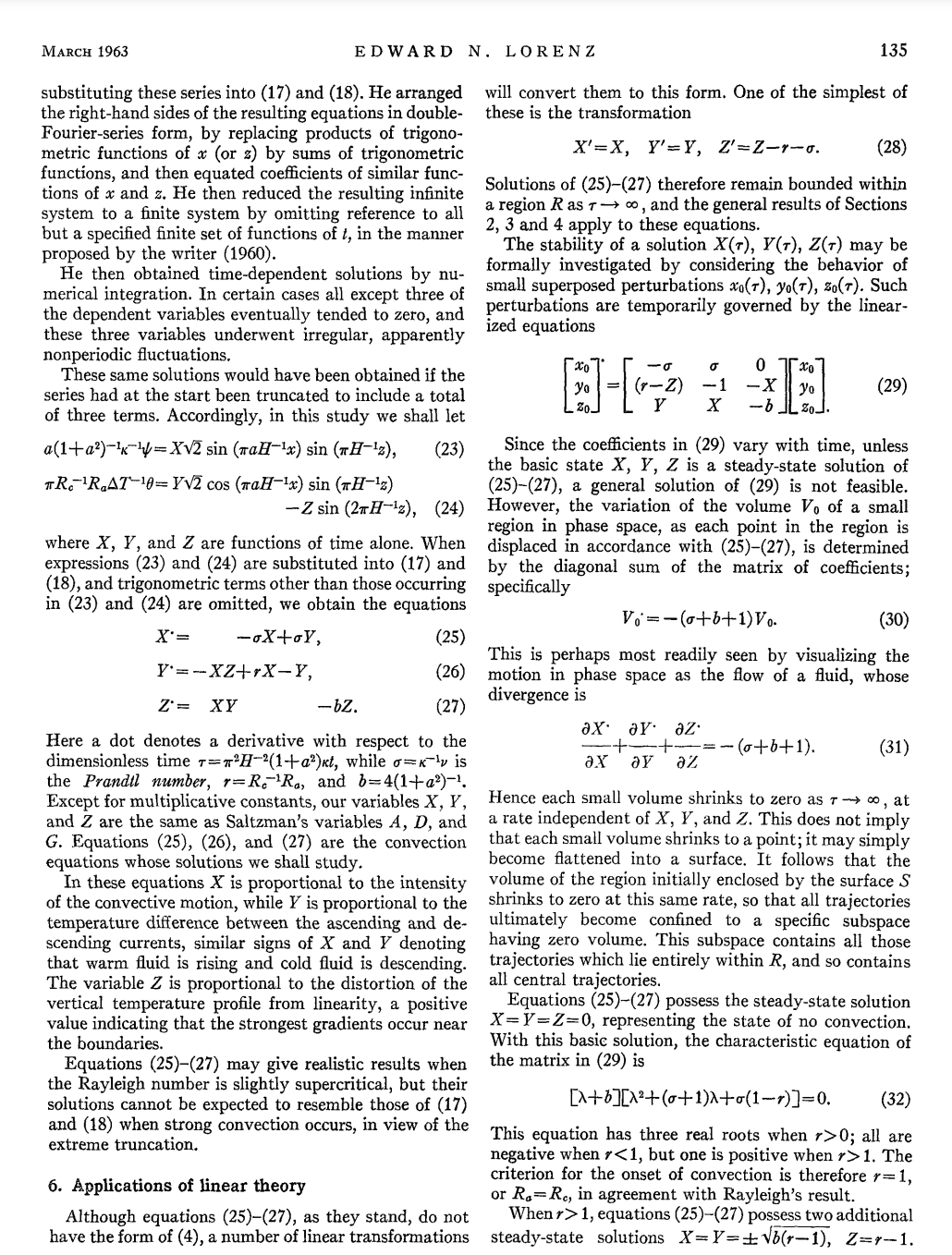
Lorenz system
Non-linear system of
ordinary differential equations (ODEs)
Lorenz system
Lorenz system
\(\dfrac{dx}{dt}=x'\)
Lorenz system
Lorenz E. N. (1963). Deterministic Nonperiodic Flow. Journal of the Atmospheric Sciences. 20(2): 130–141.
It was introduced in the 1960s
by Edward Norton Lorenz

Lorenz system
Lorenz E. N. (1963). Deterministic Nonperiodic Flow. Journal of the Atmospheric Sciences. 20(2): 130–141.
as a simplified mathematical model
for the atmospheric convection.
It was introduced in the 1960s
by Edward Norton Lorenz
Lorenz system
We are looking for the functions
such that
What does it mean to solve a system?
Lorenz system
\((x,y,z)\)
\(x\)
\(y\)
\(z\)
The solution gives you the position
If the system represents the velocity of this particle
time
\(t\)
Lorenz system
\((x,y,z)\)
\(x\)
\(y\)
\(z\)
time
\(t\)
The solution gives you the position
at any time \(t\)
General systems
In general, solving systems of ODEs is incredibly difficult,
sometimes even impossible!
The good news are that we still can solve them numerically!

General systems
General systems
In GeoGebra we can use the command
NSolveODE()Here is where computers are quite useful
NSolveODE(
List of Derivatives,
Initial x-coordinate,
List of Initial y-coordinates,
Final x-coordinate
)Command
NSolveODE()Initial time
\(t_0\)
Initial conditions
\((x_0,y_0,z_0)\) at \(t=t_0\)
Final time
\(t_f\)
Lorenz system
\((x_0,y_0,z_0)\)
\(x\)
\(y\)
\(z\)
time
\(t\)
\(t_0\)
\(t_f\)
Lorenz system
\(x\)
\(y\)
\(z\)
time
\(t\)
\(t_0\)
\(t_f\)
\((x_f,y_f,z_f)\)
\((x_0,y_0,z_0)\)
Chaotic behaviour
d = 10
b = 8/3
p = 28
x'(t,x,y,z) = d * (y - x)
y'(t,x,y,z) = x * (p - z) - y
z'(t,x,y,z) = x * y - b * z
x0 = 1
y0 = 1
z0 = 1
NSolveODE({x', y', z'}, 0, {x0, y0, z0}, 20)
len = Length(numericalIntegral1)
L_1 = Sequence( (y(Point(numericalIntegral1, i)), y(Point(numericalIntegral2, i)), y(Point(numericalIntegral3, i))), i, 0, 1, 1 / len )
f = Polyline(L_1)Script
The algorithm behind this command is based on
Runge-Kutta numeric methods
Command
NSolveODE()NSolveODE(
List of Derivatives,
Initial x-coordinate,
List of Initial y-coordinates,
Final x-coordinate
)