Computational Inverse Problems
From Foundations to Modern Approaches
J. Sulam

Bogotá, Colombia
Octubre 2025

Inverse Problems
\(x:\) phenomenon of interest
\(y = A(x):\) measurements
How do we estimate \(x\) from \(y\)?
Inverse Problems
\(\mathbb{R}^n\)
\(A : \mathbb{R}^n \to \mathbb{R}^m\)

\(x\)
\(y\)
\(\mathbb{R}^m\)

inversion
Inverse Problems
\(A : \mathbb{R}^n \to \mathbb{R}^m\)
\(\mathbb{R}^n\)
\(x\)
\(y\)
\(\mathbb{R}^m\)
-
Computed Tomography
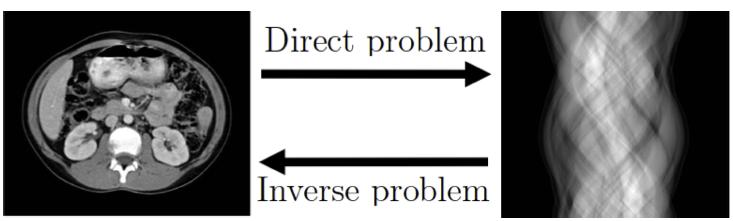
inversion
inversion

Inverse Problems
\(A : \mathbb{R}^n \to \mathbb{R}^m\)
\(\mathbb{R}^n\)
\(x\)
\(y\)
\(\mathbb{R}^m\)
-
Computed Tomography
inversion
-
Imaging

inversion

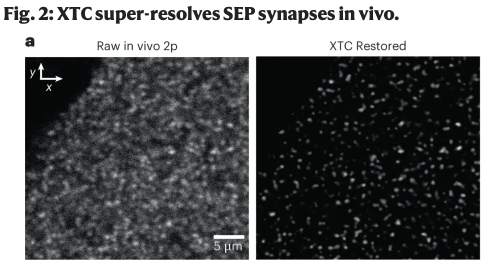
[Xiang et al, 2024]Inverse Problems
\(A : \mathbb{R}^n \to \mathbb{R}^m\)
\(\mathbb{R}^n\)
\(x\)
\(y\)
\(\mathbb{R}^m\)
inversion
Inverse Problems
\(A : \mathbb{R}^n \to \mathbb{R}^m\)
\(\mathbb{R}^n\)
\(x\)
\(y\)
\(\mathbb{R}^m\)
-
Computed Tomography
inversion
-
Imaging
-
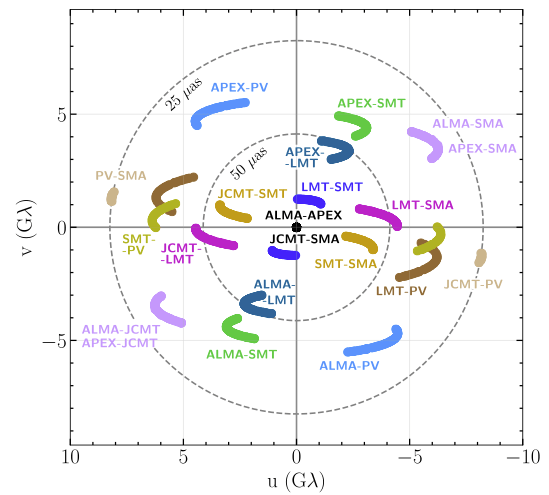
Astronomy
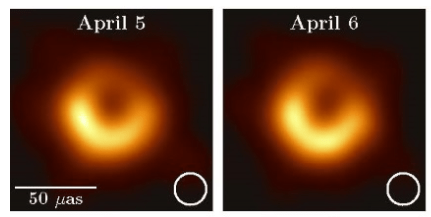
inversion
[Event Horizon Telescope Collaboration, Astrophys. J. Lett. 875 (2019).]Agenda
PART I: Foundations
PART II: Regularization and Priors
PART III: Data-driven Models


PART I: Foundations
PART I: Foundations
A problem is a well-posed problem if
1. (Existence) There exist at least one solution
2. (Uniqueness) There is at most one solution
3. (Stability) The solution depends continuously on the data
Forward problem (well-posed)
\[y = A x + z\]
forward operatorphenomenon of interestmeasurementsnoiseA problem is a well-posed problem if
1. (Existence) There exist at least one solution
2. (Uniqueness) There is at most one solution
3. (Stability) The solution depends continuously on the data
Inverse problem
\[\text{find }x \text{ so that }y = A x + z\]
Can we invert the operator \(A\)?
PART I: Foundations
\[\text{find }x \text{ so that }y = A x + z\]
(unstable)
Error \(\|x - \hat x\|_2 \leq \|A^{-1}\|_2\|z\|_2 \propto \frac{1}{\lambda_n} \|z\|_2\)
\[\hat x = A^{-1}y = x + A^{-1}z\]
\(1~ \bullet~\) If \(n=m\) and \(A:\) non-singular:
\(=\)
\(+\)
Inverse Problem
\(2~ \bullet~\) If \(n<m\), then \(A\) cannot span \(\mathbb R^m\).
Thus, \(y \notin \text{span}(A)\), and thus \(\nexists ~ x : y = Ax\).
(non-existence)
\(=\)
\(+\)
\[\hat x = A^{-1}y = x + A^{-1}z\]
\(1~ \bullet~\) If \(n=m\) and \(A:\) non-singular:
\[\text{find }x \text{ so that }y = A x + z\]
Inverse Problem
(non-uniqueness)
\(3~ \bullet~\) If \(n>m\), and \(A:\) full-rank.
\(=\)
\(+\)
\(2~ \bullet~\) If \(n<m\), then \(A\) cannot span \(\mathbb R^m\).
Thus, \(y \notin \text{span}(A)\), and thus \(\nexists ~ x : y = Ax\).
\[\hat x = A^{-1}y = x + A^{-1}z\]
\(1~ \bullet~\) If \(n=m\) and \(A:\) non-singular:


\[\text{find }x \text{ so that }y = A x + z\]
Inverse Problem
(non-uniqueness)
\(3~ \bullet~\) If \(n>m\), and \(A:\) full-rank.
\(=\)
\(+\)
\[\min_x ~R(x) ~~ \text{s.t.}~~ y = Ax\]
Strategy: define a new criteria, \(R(x): \mathbb R^n \to \mathbb R\)
Analytical Example ->
\[\text{find }x \text{ so that }y = A x + z\]
Inverse Problem
PART I: Foundations
PART II:
Regularization and Priors
PART II: Regularization and Priors
A Bayesian Perspective on Inverse Problems
Forward Model:
\(y = A x + z\)
where \(x \sim p, Z\sim\mathcal N(0,\sigma^2 I_n)\)
problem modeled by a joint density \(p(x,y,z)\)
What is the posterior distribution for the unknown, \(p(x|y)\)?
Inversion: (inference)
What is the most likely unknown, \(\arg\max_x p(x|y)\)?
Maximum a Posteriori (MAP)
\(x_\text{MAP}\)
\[\arg\max_x~ p(x|y)\]
Maximum a Posteriori (MAP)
\[= \arg\max_x~\frac{p(y|x)~p(x)}{p(y)}\]
\[= \arg\max_x~ p(y|x)p(x)\]
\[= \arg\min_x~ -\log p(y|x) - \log p(x)\]
\(y = Ax + z\), with Gaussian \(z ~~\Rightarrow ~~ p(y|x) =\frac{1}{\sigma\sqrt{2\pi}}e^{-\frac{1}{2\sigma^2}{\|Ax-y\|^2_2}}\)
\[= \arg\min_x~ \frac{1}{2\sigma^2} \|Ax-y\|^2_2 - \log p(x)\]
\[= \arg\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]

PART II: Regularization and Priors
likelihood
prior distribution

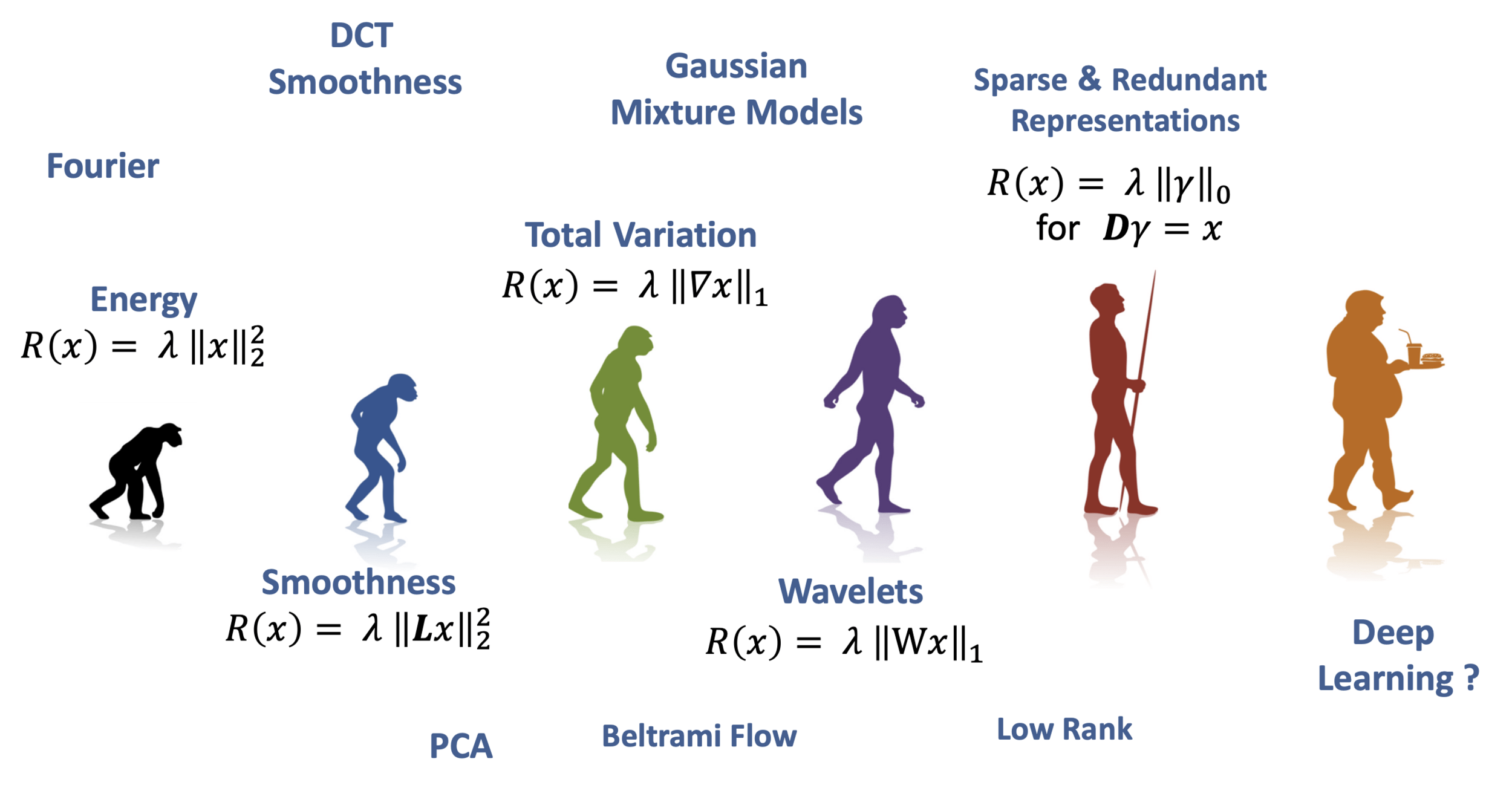
What priors should we choose?
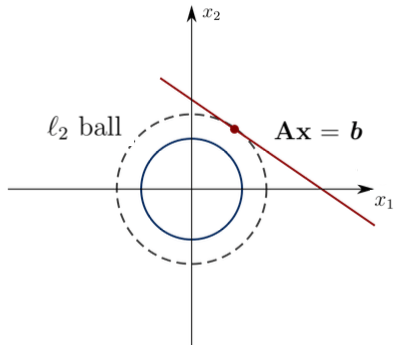
\(1~ \bullet~\) \(R(x) =\|x\|^2_2\): low Euclidean norm
does not allow for recovery
\(A^\dagger y = A^\dagger (Ax_0)=A^\top (AA^\top)^{-1}A x_0 \neq x_0\)
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
What priors should we choose?
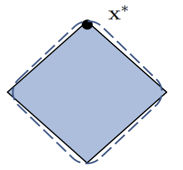
\(2~ \bullet~\) \(R(x) =\|x\|_0 = |\{x_i : x_i\neq 0\}|\): promoting sparsity
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
What priors should we choose?
\(2~ \bullet~\) \(R(x) = \|x\|_0 = |\{x_i : x_i\neq 0\}|\): promoting sparsity
\(2'~ \bullet~\) \(R(x) =\|x\|_1 = \sum_{i=1}^n |x_i|\), closest norm to \(\|x\|_0\), and promoting sparsity
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
\(\|x\|_0\)
\(\|x\|_1\)
What priors should we choose?
Sometimes, yes
[Xu et al, 2023]\(2'~ \bullet~\) \(R(x) = \|x\|_1 = \sum_{i=1}^n |x_i|\), closest norm to \(\|x\|_0\), and promoting sparsity
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
Is real data sparse?
What priors should we choose?
Sometimes, kind of...

\(2'~ \bullet~\) \(R(x) =\|x\|_1 = \sum_{i=1}^n |x_i|\), closest norm to \(\|x\|_0\), and promoting sparsity
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
Is real data sparse?
What priors should we choose?
\(2'~ \bullet~\) \(R(x) =\|x\|_1 = \sum_{i=1}^n |x_i|\), closest norm to \(\|x\|_0\), and promoting sparsity
\[\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda R(x)\]
Is real data sparse?
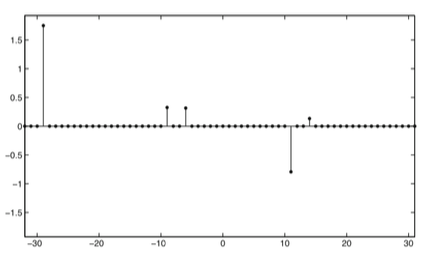
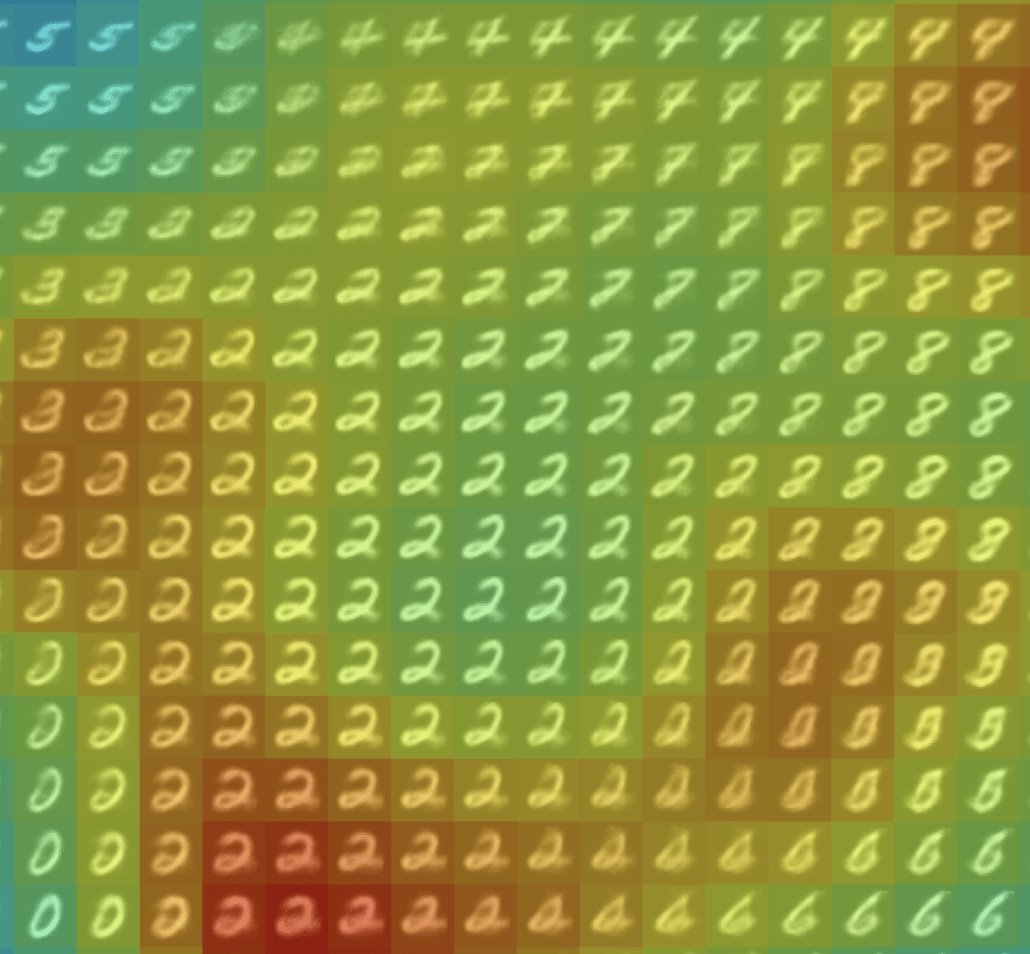
Mostly, not
\(x\)
... unless in an appropriate basis
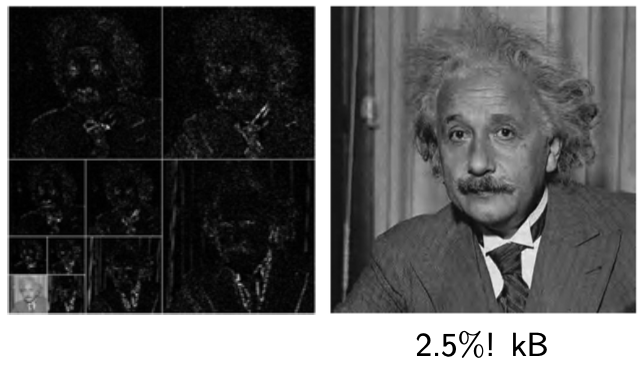
\(z=Wx\)
\[\min_x~ \frac{1}{2} \|AWx-y\|^2_2 + \lambda \|x\|_1\]
Thus, if \(y = Ax + z\) and \(x\) is sparse under \(W\),
Sparsity-based Priors
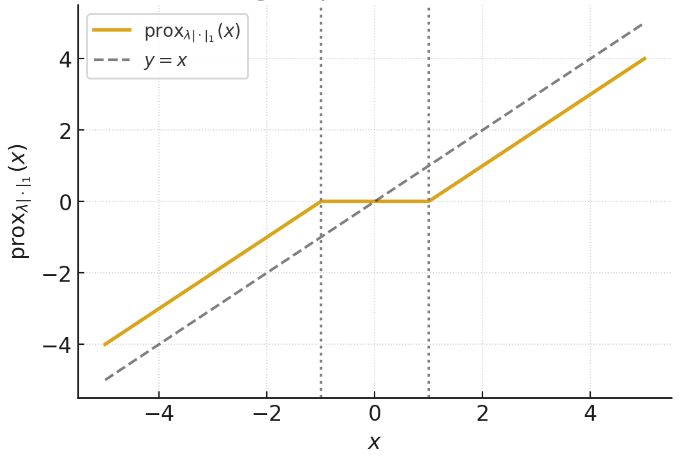
\[\arg\min_x~ \frac{1}{2} \|x-y\|^2_2 + \lambda \|x\|_1\]
Consider the simple setting \(y = x + z\) and \(x\) sparse
\(=\arg\max_x p(x|y)\)
\[\text{prox}_{\lambda\|\cdot\|_1}(y) \vcentcolon=\]
Proximal Operators:
\[\text{prox}_{\lambda f}(y) = \arg\min_x \frac12\|y-x\|^2_2 + \lambda f(x)\]
Why?
\[\left[\text{prox}_{\lambda\|\cdot\|_1}(y) \right]_i= \begin{cases} y_i-\lambda, & y_i>\lambda, \\ 0, & |y_i| \leq \lambda, \\ y_i+\lambda, & y_i< -\lambda. \end{cases}\]
Sparsity-based Priors
\[\arg\min_x~ \frac{1}{2} \|Ax-y\|^2_2 + \lambda \|x\|_1\]
Consider the setting \(y = Ax + z\) and \(x\) sparse
\(=\arg\max_x p(x|y)\)
\(\nabla_x h(x)\)

\(h(x)\)
Proximal Gradient Descent:
\[x^{k+1}= \text{prox}_{\lambda \|\cdot\|_1}(x^k - \eta A^\top( A x^k - y))\]
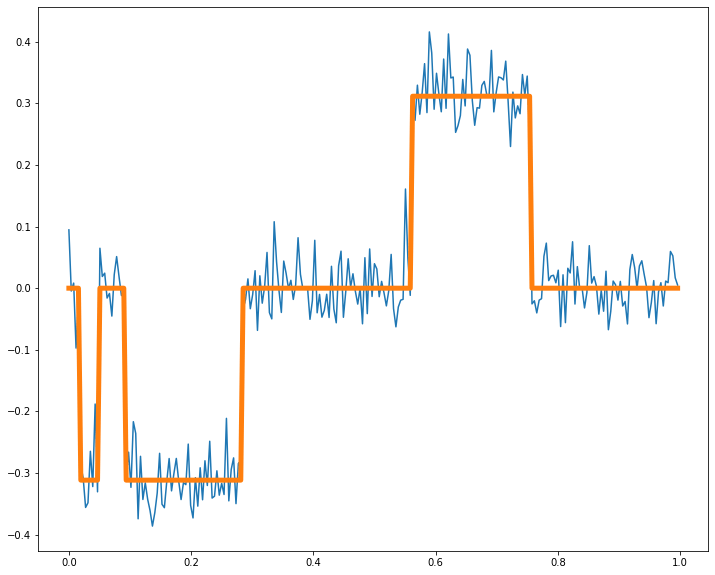
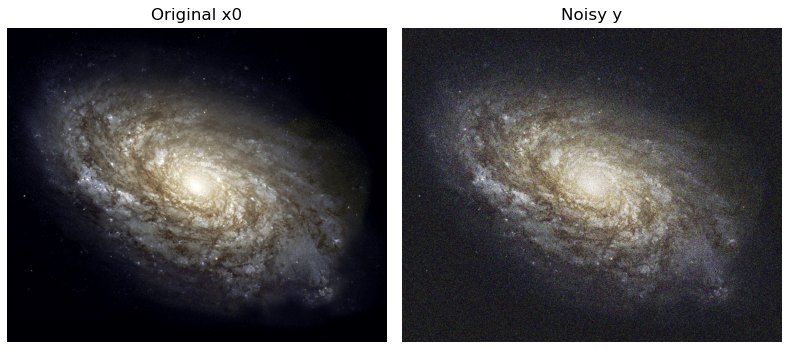
Sparsity-based Priors: Examples
Consider the setting \(y = x + z\) , \(z\sim\mathcal N(0,\sigma^2I)\)
P1) \(\arg\min_x~ \frac{1}{2} \|x-y\|^2_2 + \lambda \|x\|^2_2\)
P2) \(\arg\min_x~ \frac{1}{2} \|x-y\|^2_2 + \lambda \|x\|_1\)
P3) \(\arg\min_x~ \frac{1}{2} \|W_{wavelet}~x-y\|^2_2 + \lambda \|x\|_1\)
PART II:
Regularization and Priors
PART III:
Data-driven Models
PART III: Data-driven Models
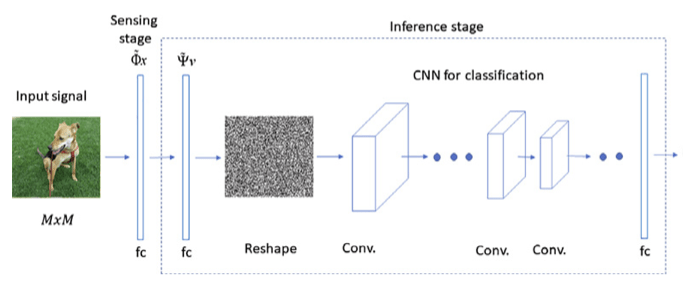
Deep Learning in Inverse Problems
2) choose loss function \(\ell: \mathbb R^n \times \mathbb R^n \to \mathbb R\) (and other hyper parameters)
Option A: agnostic methods train a network \(f_\theta \in \mathcal F_\theta = \{f_\theta: \mathbb R^n \to \mathbb R^n\}\)
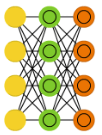
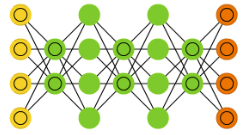
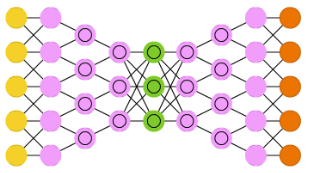
1) choose architecture \(\mathcal F_\theta\)
So that hopefully \(f_\theta(y) \approx x\) in expectation
\[\min_\theta \frac1N \sum_{i=1}^N \ell(f_\theta(y_i),x_i) \]
3) collect training data \( \{(x_i,y_i)\}_{i=1}^N \) and train by minimizing the empirical risk
Deep Learning in Inverse Problems
So that hopefully \(f_\theta(y) \approx x\) in expectation
\[\min_\theta \frac1N \sum_{i=1}^N \ell(f_\theta(y_i),x_i) \]
1) choose architecture \(\mathcal F_\theta\)
2) choose loss function \(\ell: \mathbb R^n \times \mathbb R^n \to \mathbb R\) (and other hyper parameters)
3) collect training data \( \{(x_i,y_i\}_{i=1}^N \) and train by minimizing the empirical risk
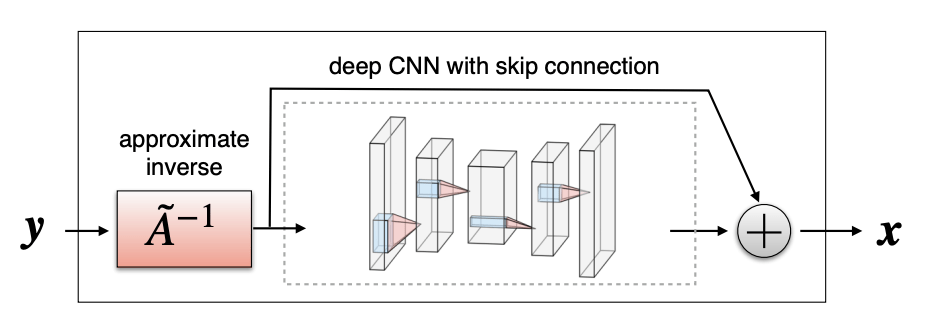
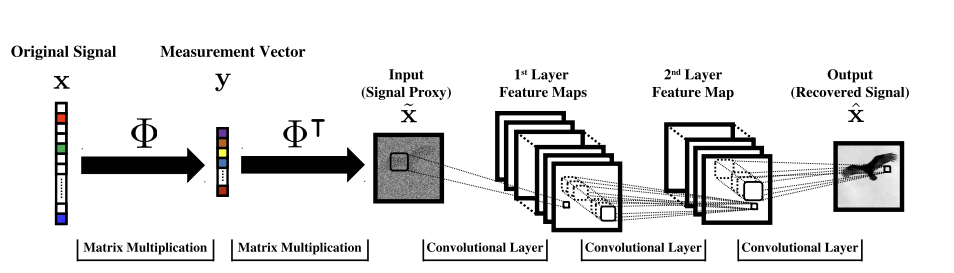
[Mousavi & Baraniuk, 2017]
[Ongie, Willet, et al, 2020]
[Adler et al, 2016]
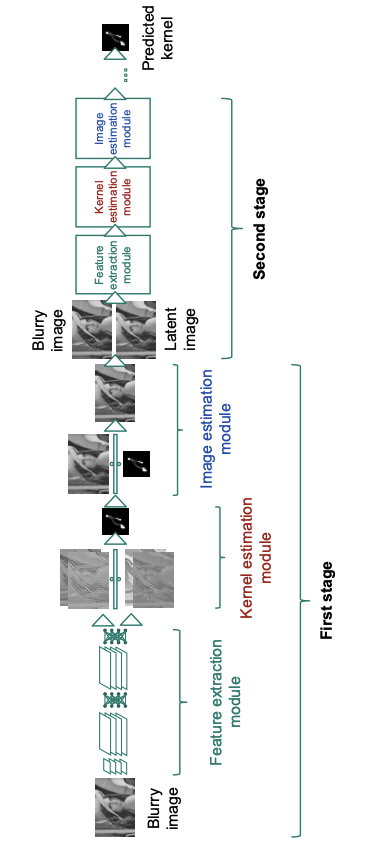
[Schuler et al, 2015]
Option A: agnostic methods train a network \(f_\theta \in \mathcal F_\theta = \{f_\theta: \mathbb R^n \to \mathbb R^n\}\)
Option B: data-driven regularizer \(R_\theta \in \mathcal R_\theta = \{R_\theta: \mathbb R^n \to \mathbb R\}\)
- Priors as critics
[Lunz, Öktem, Schönlieb, 2020] and others ..
- via MLE
[Ye Tan, ..., Schönlieb, 2024], ...
- RED
[Romano et al, 2017] ...
- Generative Models
[Bora et al, 2017] ...
\[\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \]
\[\hat R_\theta(x)\]
Deep Learning in Inverse Problems
Option C: Implicit Priors (via Plug&Play)
Proximal Gradient Descent: \( x^{t+1} = \text{prox}_R \left(x^t - \eta A^T(Ax^t-y)\right) \)
... a denoiser
Deep Learning in Inverse Problems
\(=\arg\max_x p(x|y)\)
Option C: Implicit Priors (via Plug&Play)
Proximal Gradient Descent: \( x^{t+1} = {\color{red}f_\theta} \left(x^t - \eta A^T(A(x^t)-y)\right) \)
Deep Learning in Inverse Problems
any denoiser

[Venkatakrishnan et al., 2013; Zhang et al., 2017b; Meinhardt et al., 2017; Zhang et al., 2021; Kamilov et al., 2023b; Terris et al., 2023]
[Gilton, Ongie, Willett, 2019]
Learned Proximals for Inverse Problems
Theorem [Fang, Buchanan, S.]
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\), and for what \(R(x)\)?
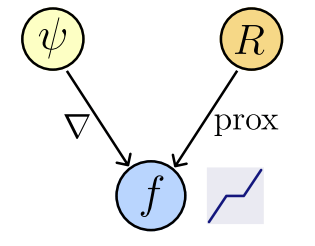
Let \(f_\theta : \mathbb R^n\to\mathbb R^n\) be a network : \(f_\theta (x) = \nabla \psi_\theta (x)\),
where \(\psi_\theta : \mathbb R^n \to \mathbb R,\) convex and differentiable (ICNN).
Then,
1. Existence of regularizer
\(\exists ~R_\theta : \mathbb R^n \to \mathbb R\) not necessarily convex : \(f_\theta(x) \in \text{prox}_{R_\theta}(x),\)
2. Computability
We can compute \(R_{\theta}(x)\) by solving a convex problem
Learned Proximals for Inverse Problems
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct" \(R(x) \propto -\log p_x(x)\)?
Goal: train a denoiser \(f(y)\approx x\)
Which loss function?
Learned Proximals for Inverse Problems
How do we find \(f(x) = \text{prox}_R(x)\) for the "correct" \(R(x) \propto -\log p_x(x)\)?
Theorem [Fang, Buchanan, S.]
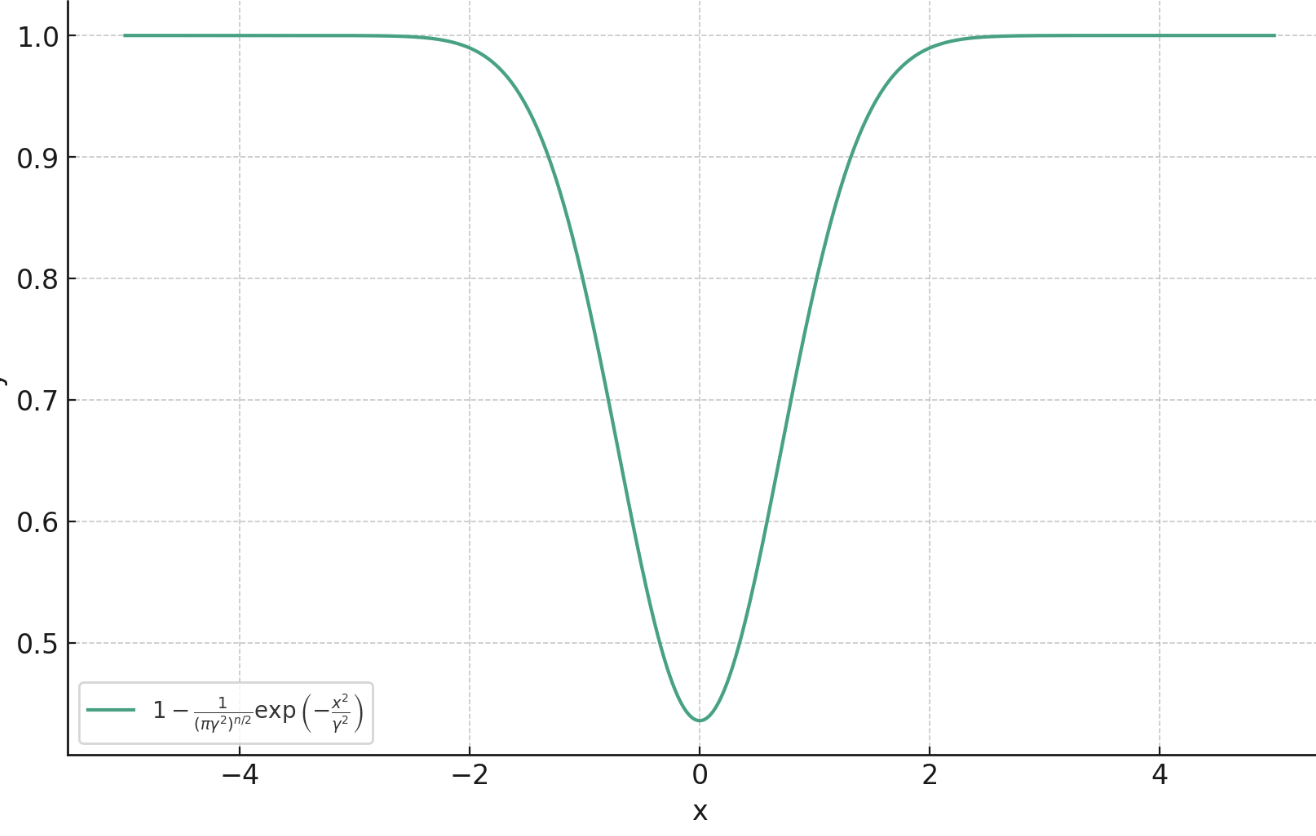
Proximal Matching Loss:\(\gamma\)
Goal: train a denoiser \(f(y)\approx x\)
Let
Then,
a.s.
Learned Proximals for Inverse Problems
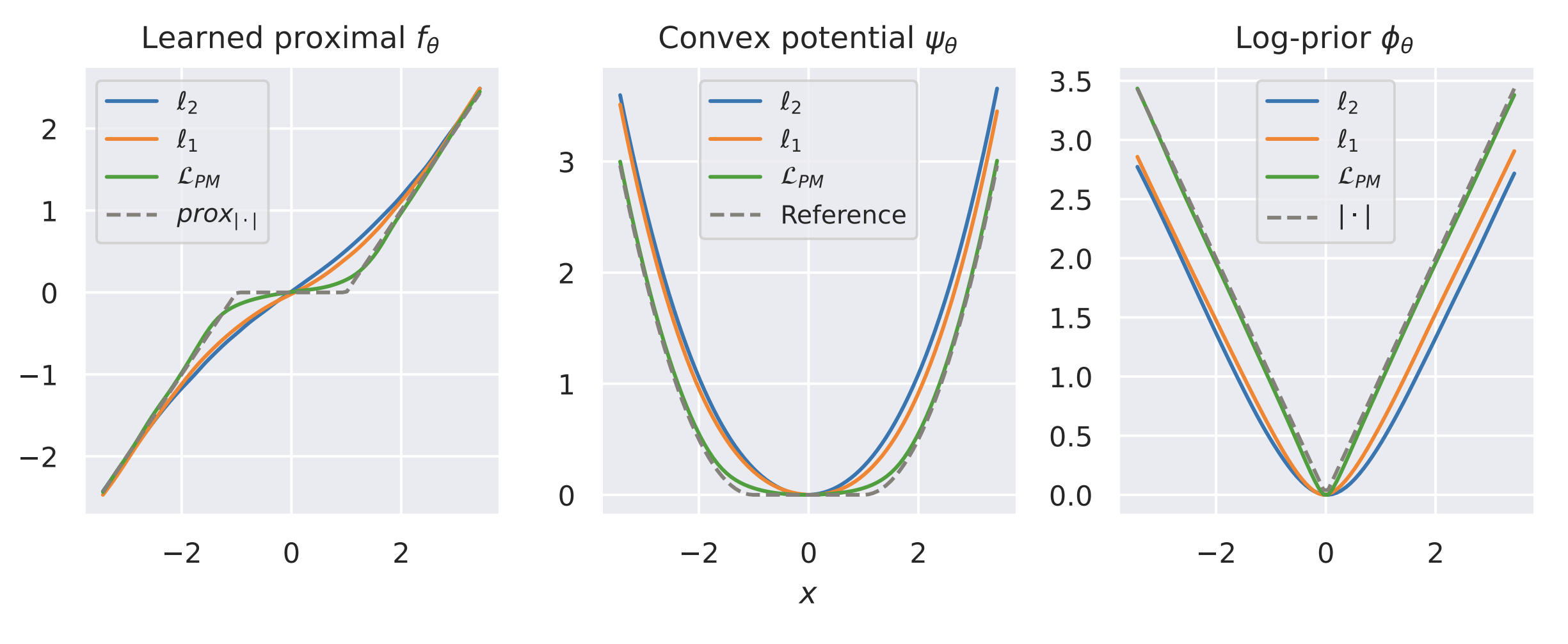
Example: recovering a prior
\(p(x) = \frac{1}{2}e^{-|x|} ~~ \Rightarrow ~~ -\log p(x) = |x| ~~ \Rightarrow ~~ \text{prox}_{|\cdot|}(x) = \operatorname{sign}(x)\,\max(|x| - \lambda, 0)\)
Learned Proximals for Inverse Problems
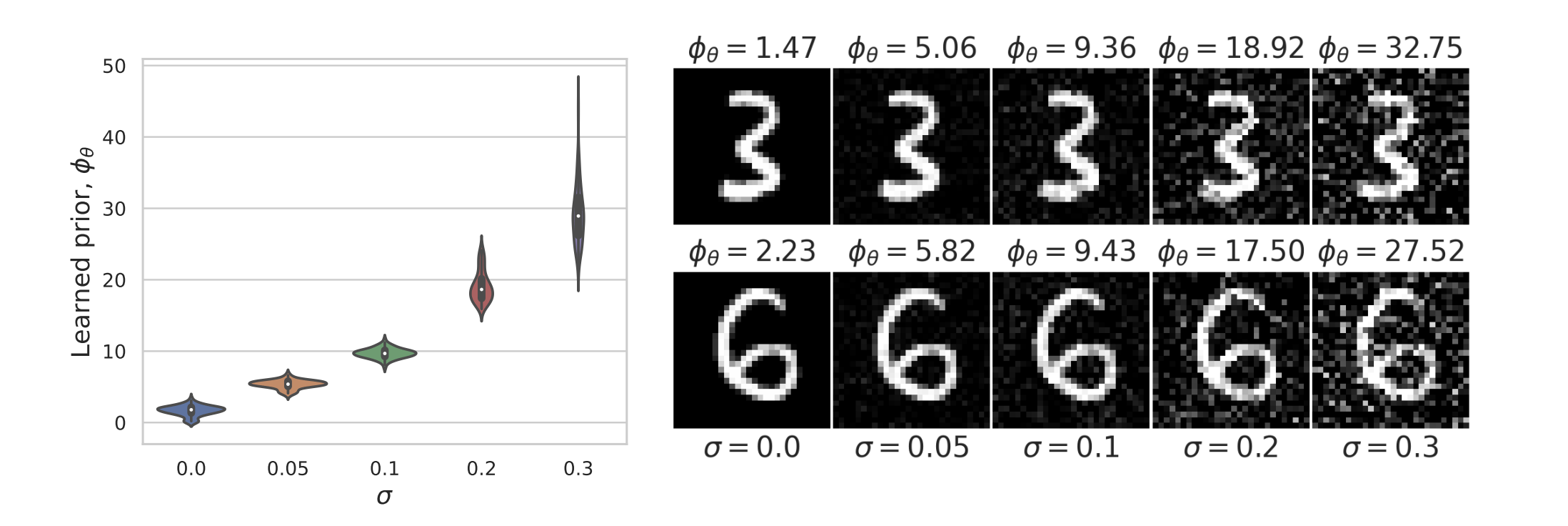
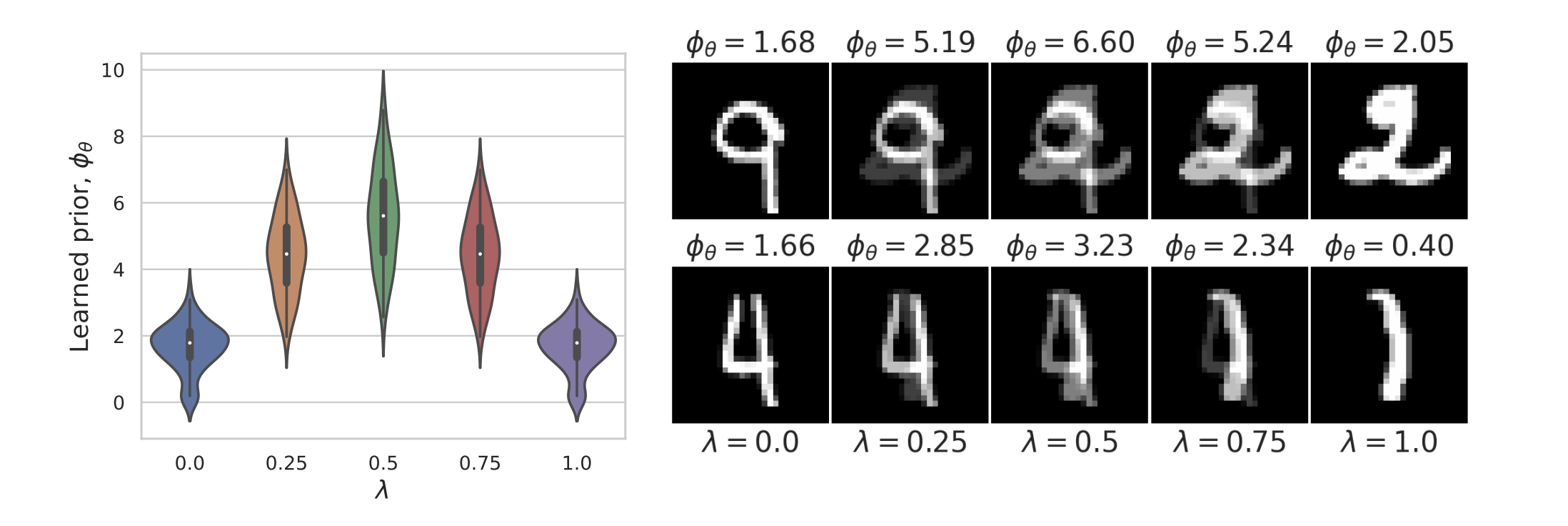
Learned Proximals for Inverse Problems
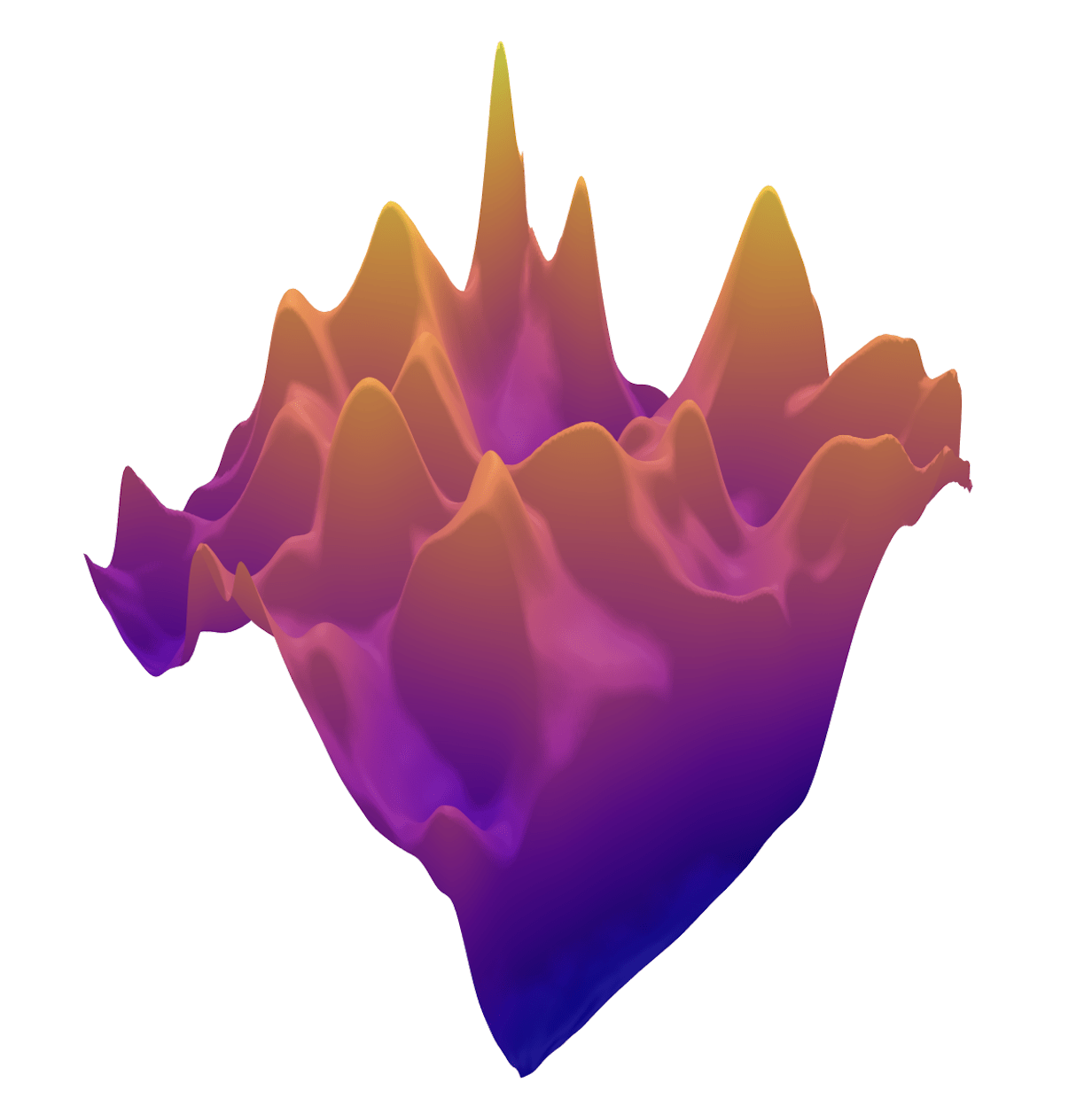
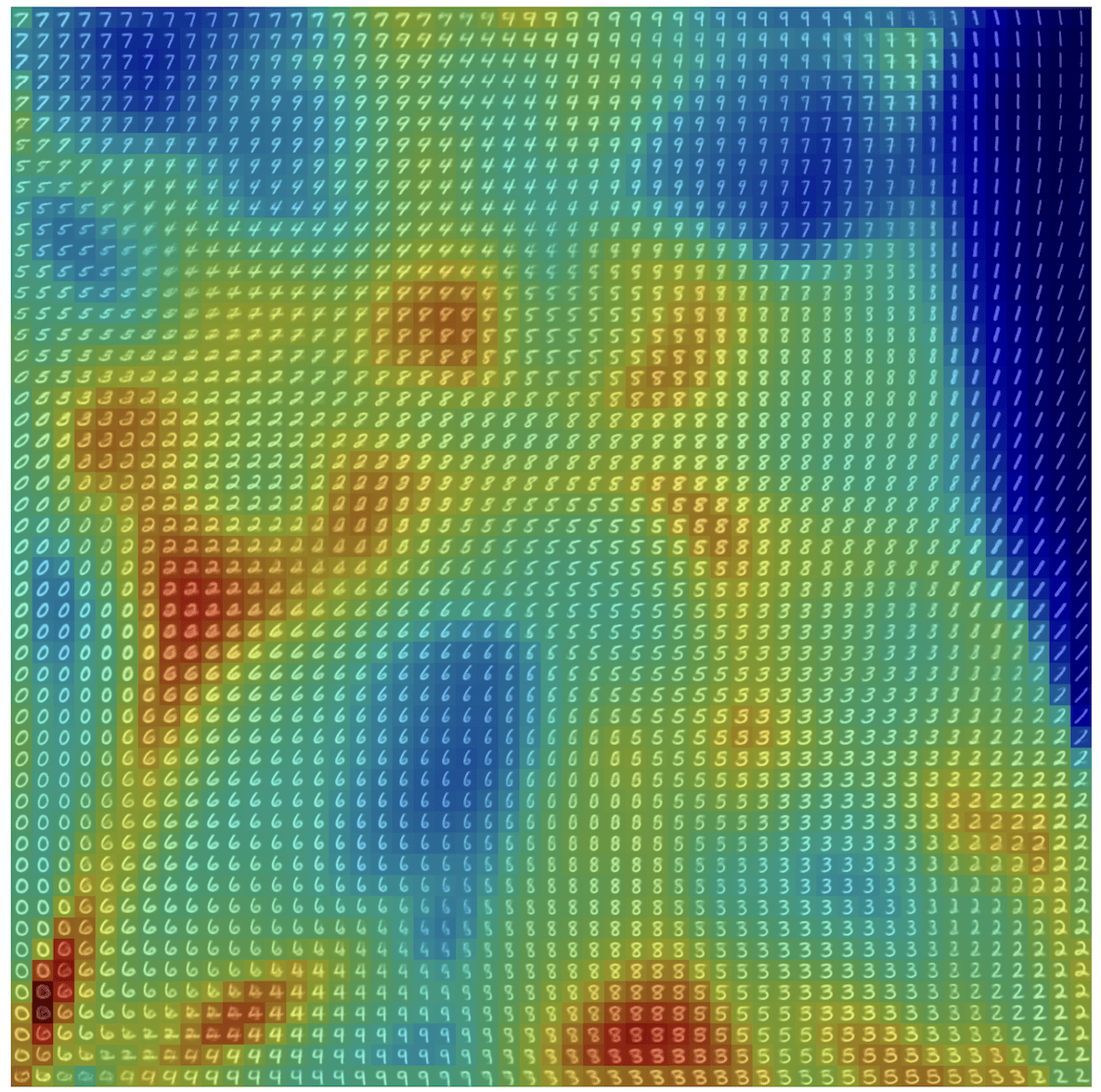
\(R(\tilde{x})\)
Learned Proximals for Inverse Problems
[Fang, Buchanan & S. What's in a Prior? Learned Proximal Networks for Inverse Problems, ICLR 2024]
Convergence guarantees!
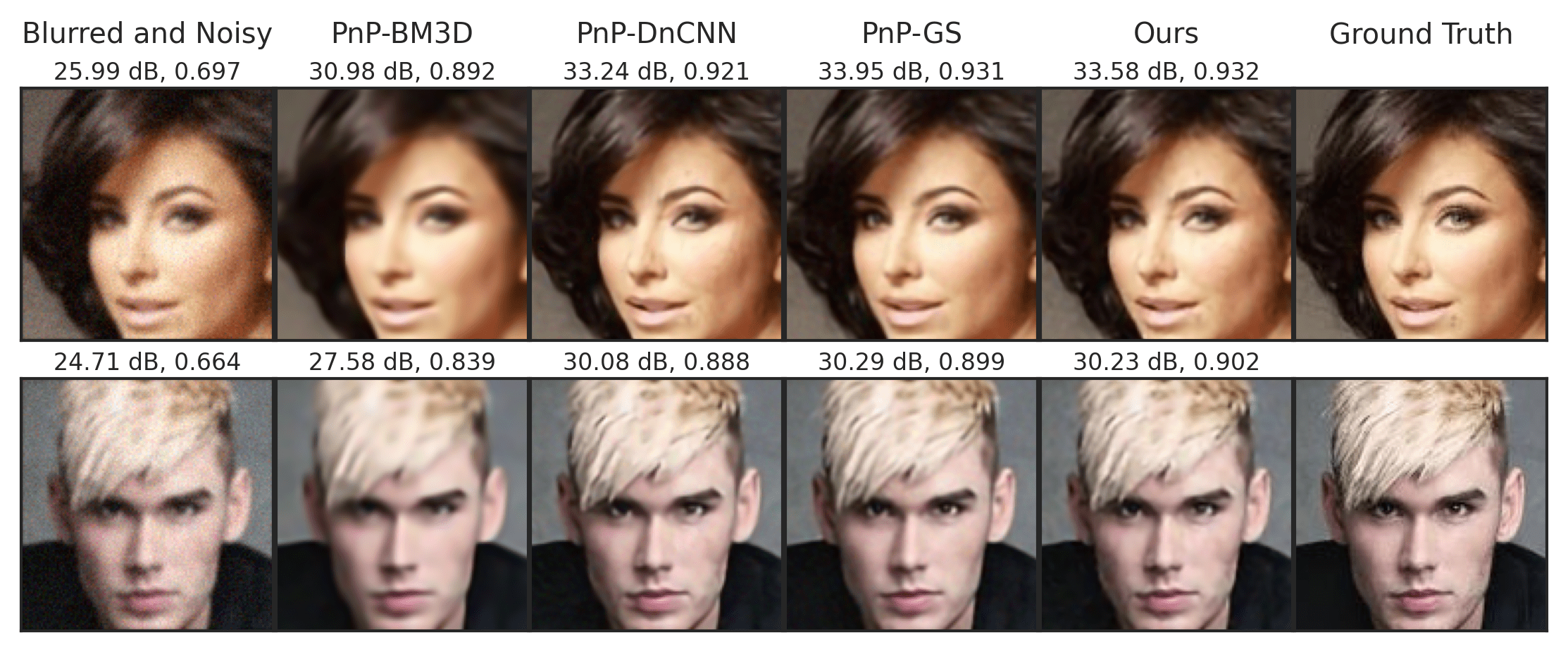
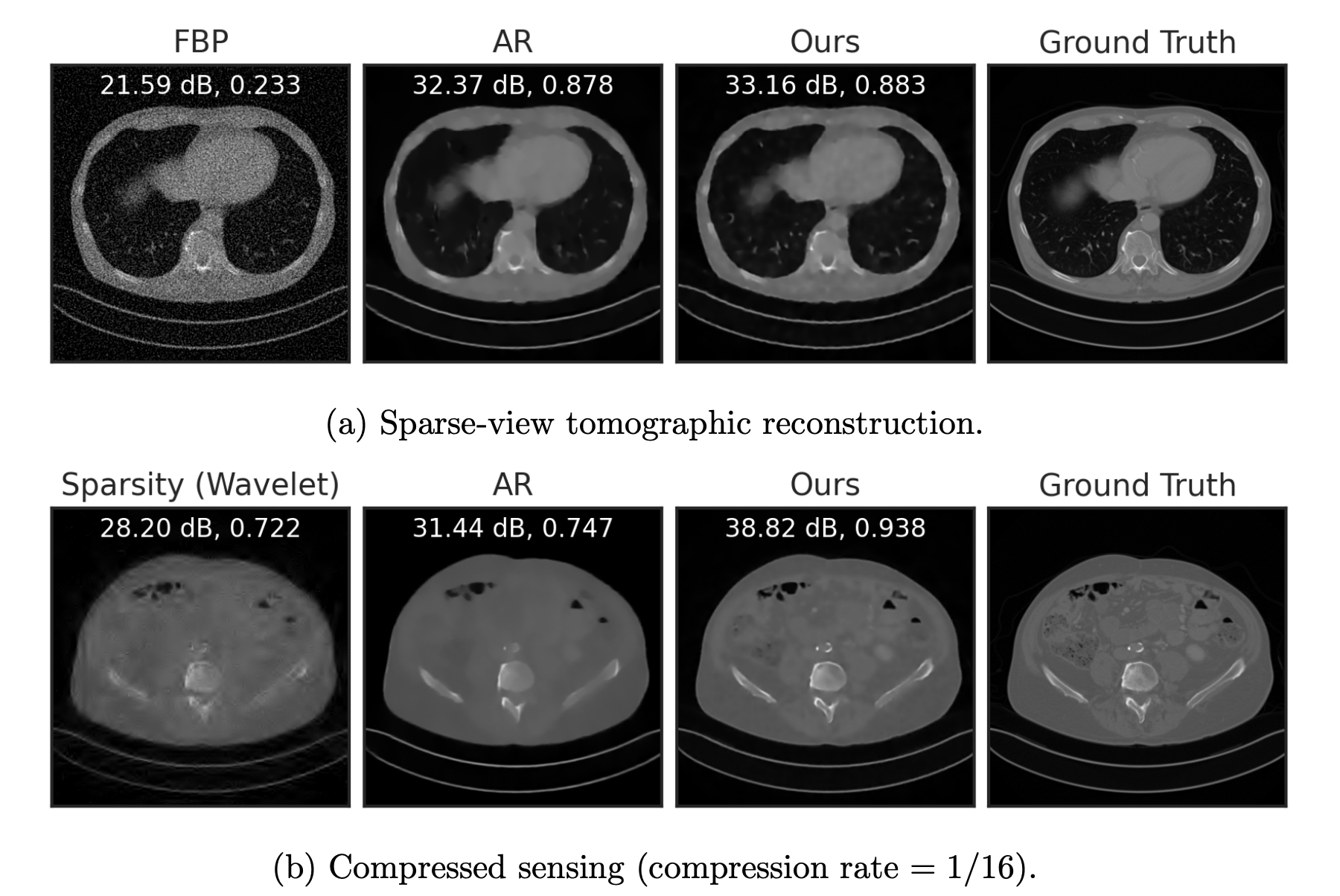
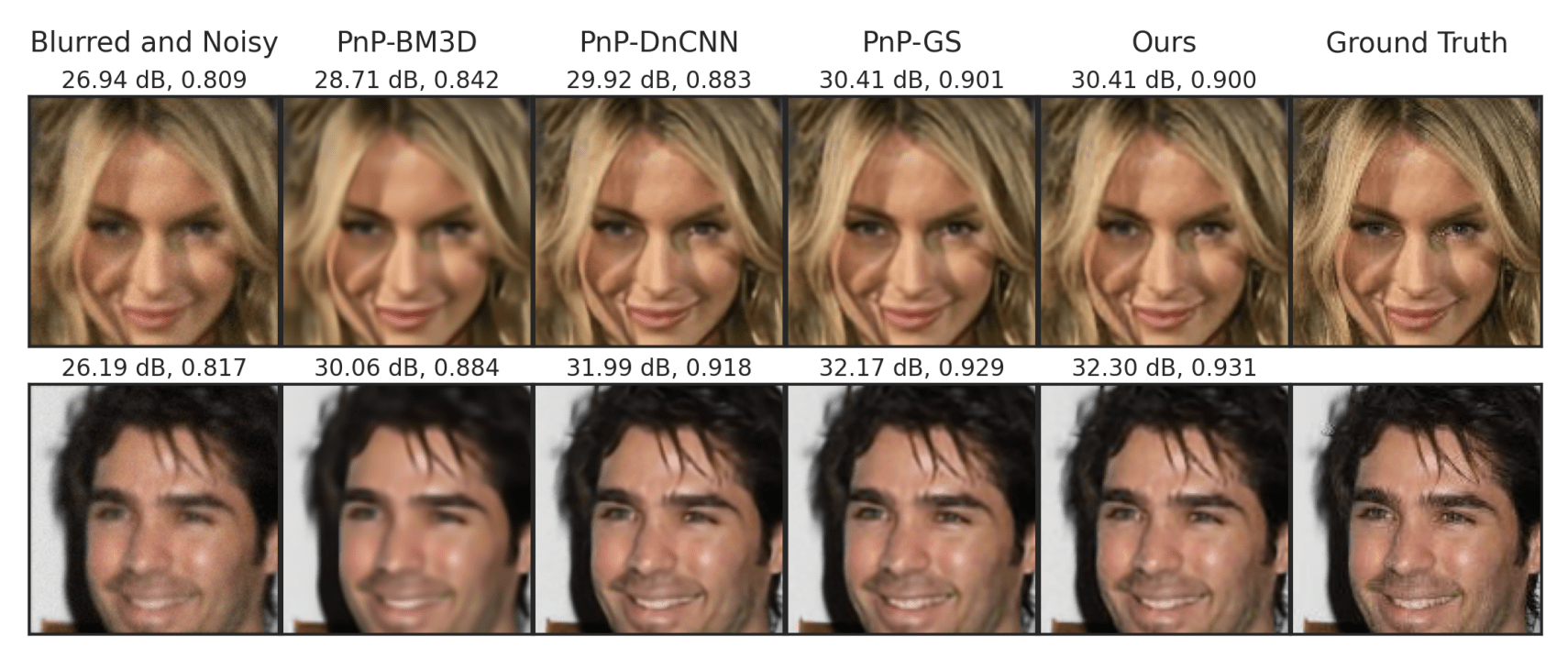
Inverse Problems with data-driven denoisers: Examples
Consider the setting \(y = Ax + z\) , \(z\sim\mathcal N(0,\sigma^2I)\)
\( x^{t+1} = {\color{red}f_\theta} \left(x^t - \eta A^T(A(x^t)-y)\right) \)
a) \(f_\theta = \text{BM3D}\) [Dabov et al, 2007]
b) \(f_\theta = \text{DnCNN}\) [Zhang et al., 2017]
c) \(f_\theta = \text{LPN}\) [Fang et al, 2024]
i) \(A: \text{deblurring}\)
ii) \(A : \text{subsampling}\)
That is all, folks!
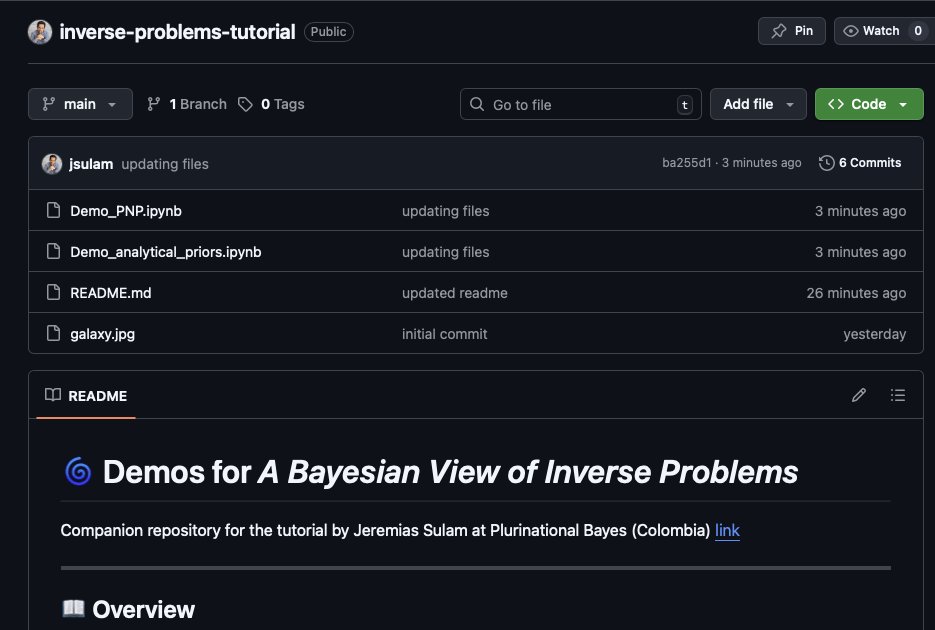
http://jsulam.github.io
jsulam1@jhu.edu
Questions?