What's in your Prior?
Jeremias Sulam
Learned Proximal Networks for Inverse Problems
BIRS Casa Matemática Oaxaca
Computational Harmonic Analysis in Data Science and Machine Learning

"The biggest lesson that can be read from 70 years of AI research is that general methods that leverage computation are ultimately the most effective, and by a large margin. [...] Seeking an improvement that makes a difference in the shorter term, researchers seek to leverage their human knowledge of the domain, but the only thing that matters in the long run is the leveraging of computation. [...]
We want AI agents that can discover like we can, not which contain what we have discovered."The Bitter Lesson, Rich Sutton 2019
"The biggest lesson that can be read from 70 years of AI research is that general methods that leverage computation are ultimately the most effective, and by a large margin. [...] Seeking an improvement that makes a difference in the shorter term, researchers seek to leverage their human knowledge of the domain, but the only thing that matters in the long run is the leveraging of computation. [...]
We want AI agents that can discover like we can, not which contain what we have discovered."The Bitter Lesson, Rich Sutton 2019
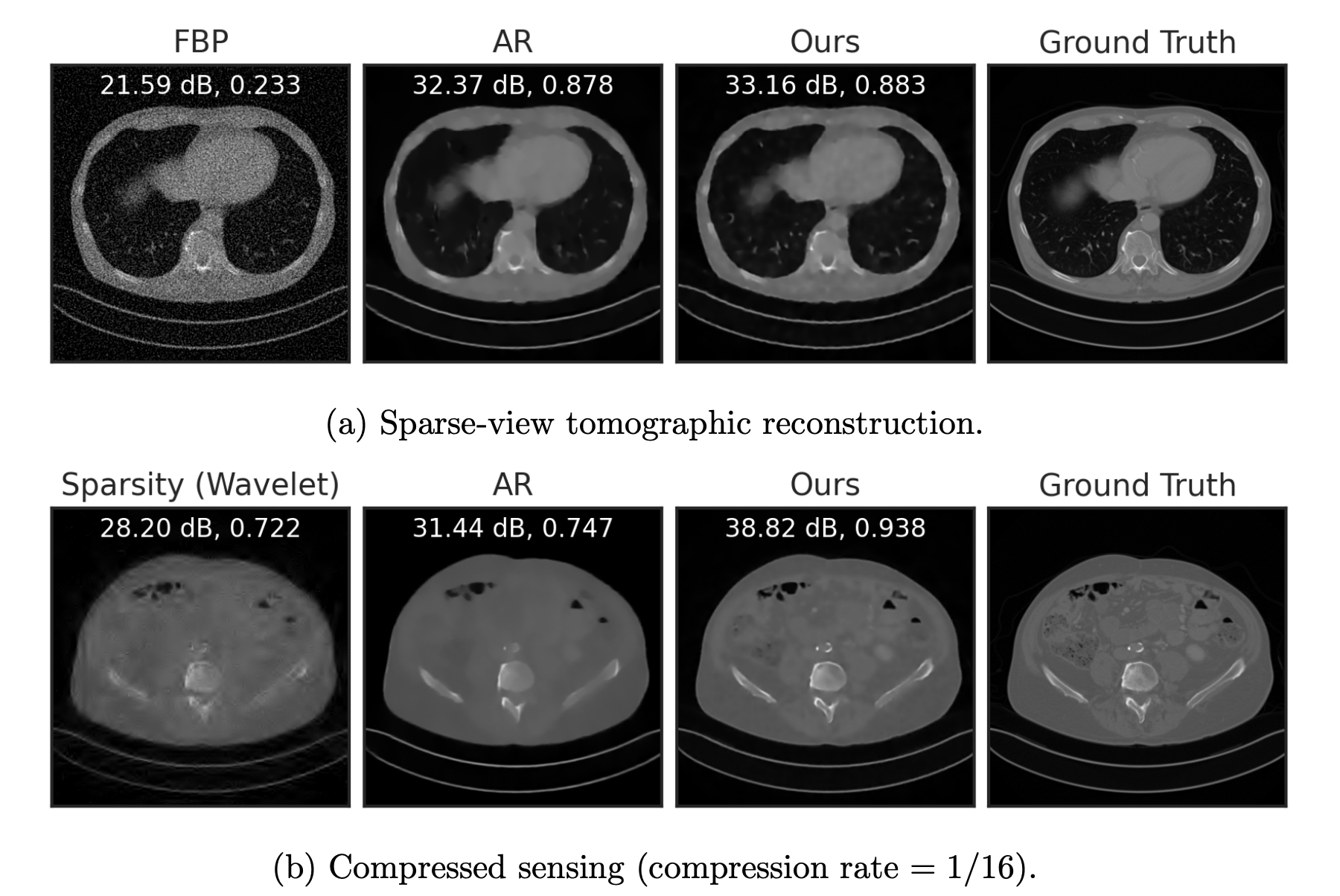
Inverse Problems
measurements
reconstruction
Inverse Problems
measurements
reconstruction
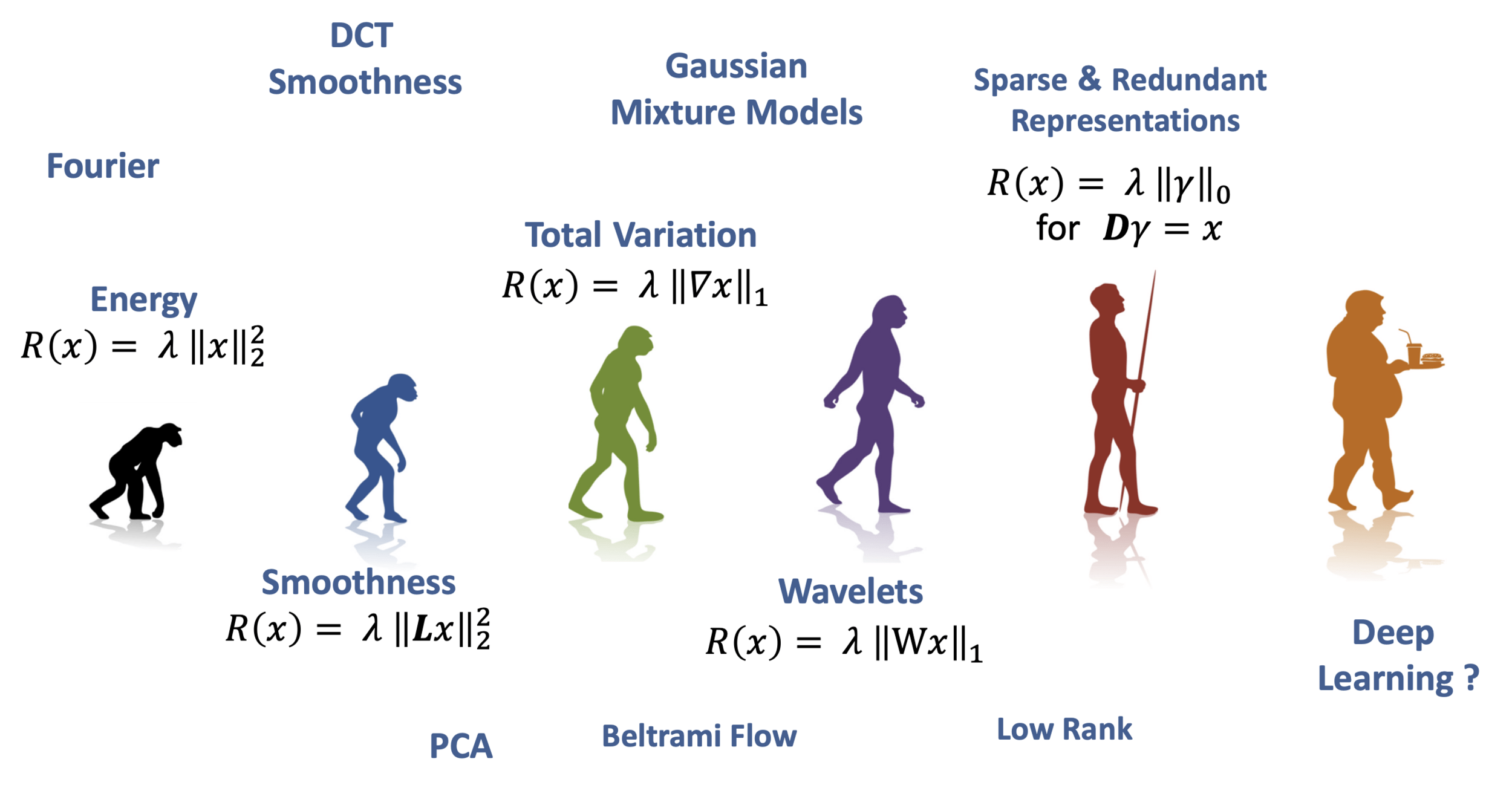
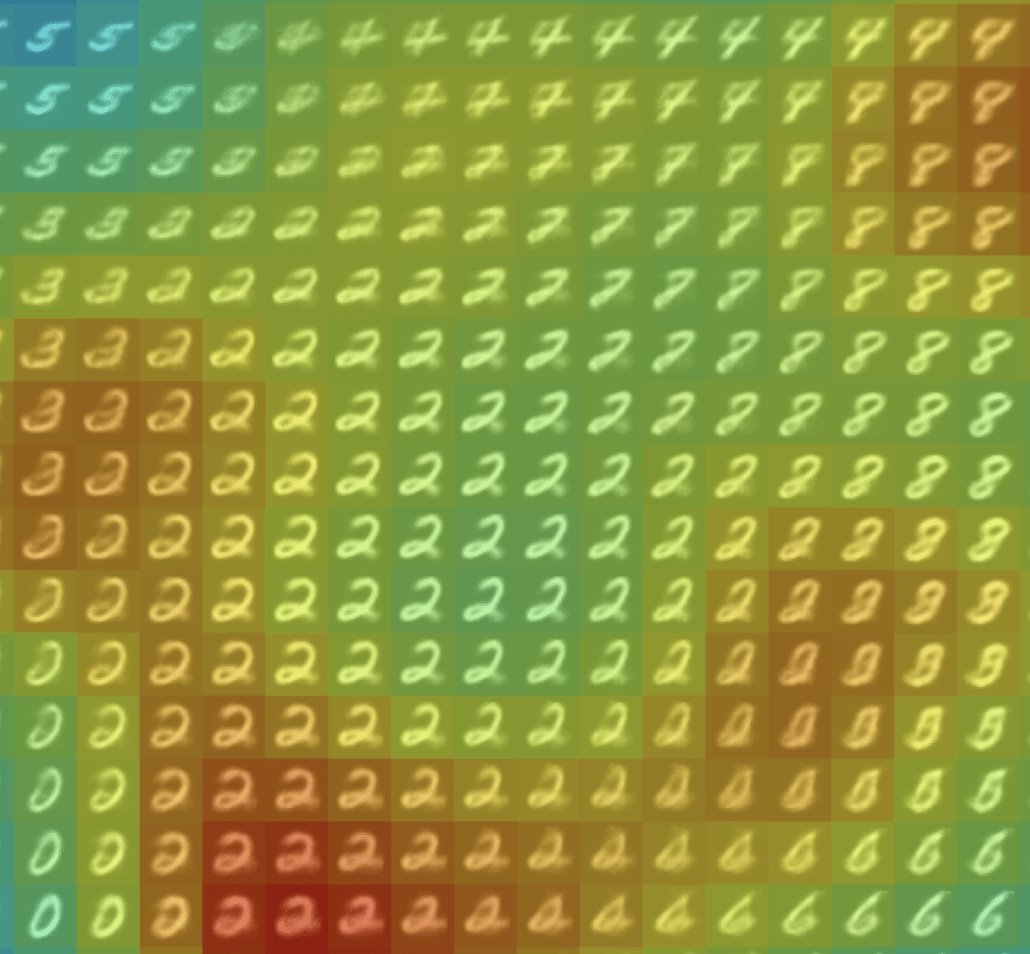
Image Priors
Deep Learning in Inverse Problems
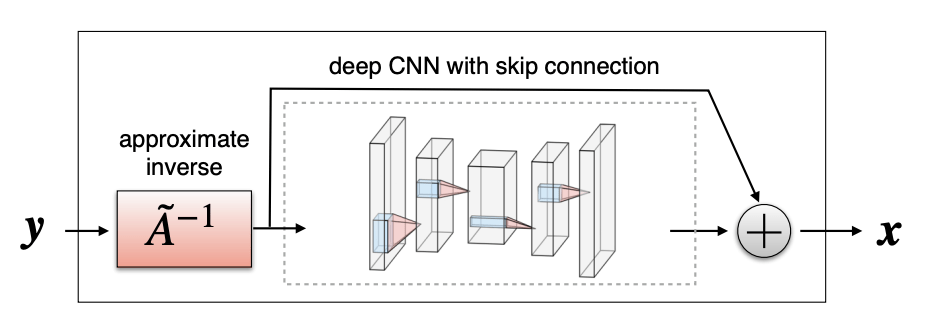
Option A: One-shot methods
Given enough training pairs \({(x_i,y_i)}\) train a network
\(f_\theta(y) = g_\theta(A^+y) \approx x\)
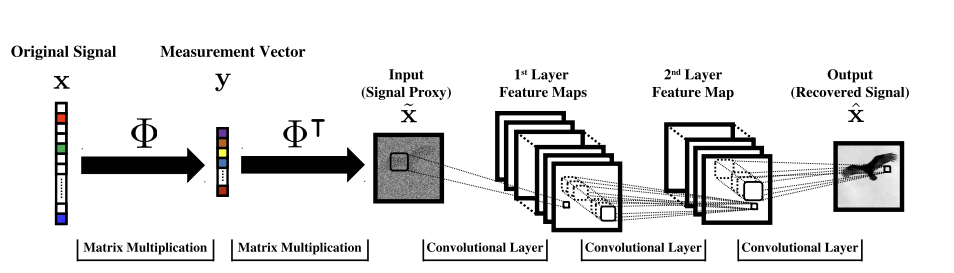
[Mousavi & Baraniuk, 2017]
[Ongie, Willet, et al, 2020]
Deep Learning in Inverse Problems
Option B: data-driven regularizer
- Priors as critics
[Lunz, Öktem, Schönlieb, 2020] and others ..
- via MLE
[Ye Tan, ..., Schönlieb, 2024], ...
- RED
[Romano et al, 2017] ...
- Generative Models
[Bora et al, 2017] ...
\[\hat x = \arg\min_x \frac 12 \| y - A x \|^2_2 + \]
\[\hat R_\theta(x)\]
Deep Learning in Inverse Problems
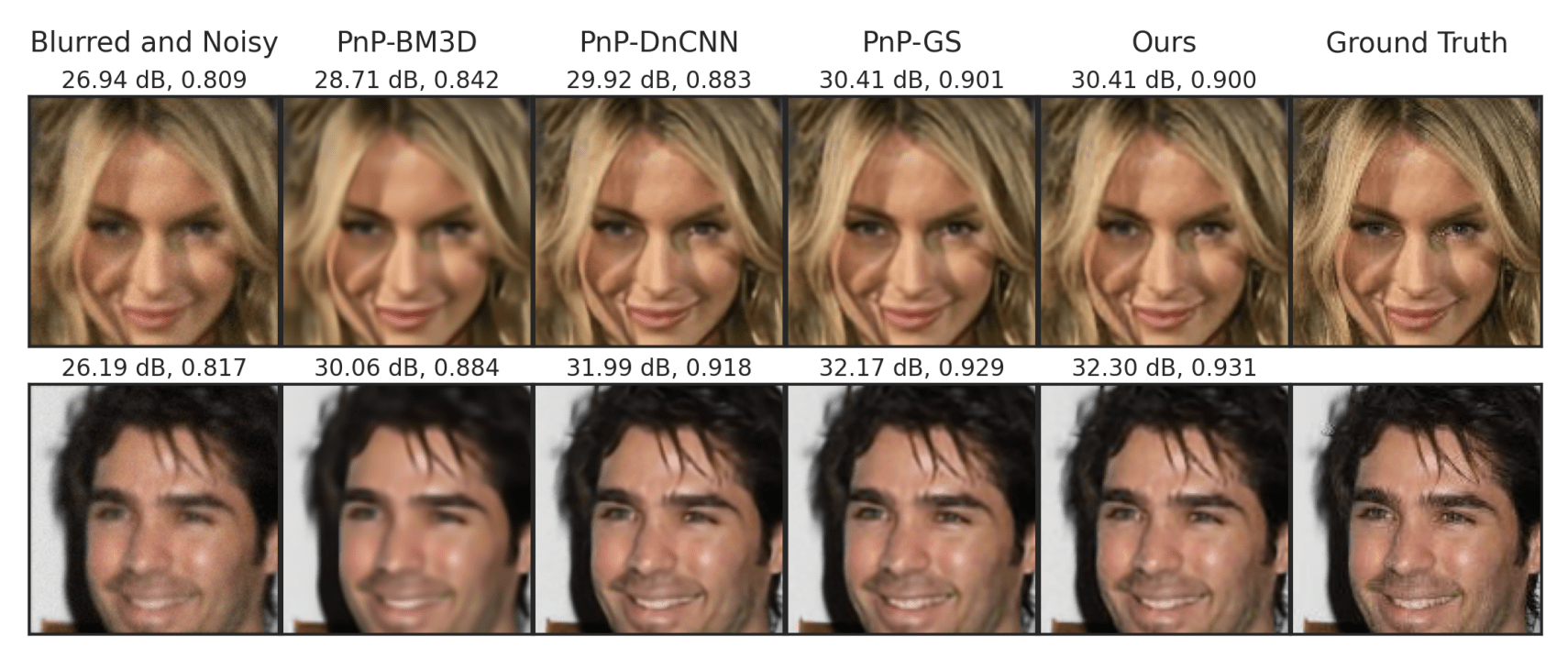
Option C: Implicit Priors (via Plug&Play)
Proximal Gradient Descent: \( x^{t+1} = \text{prox}_R \left(x^t - \eta A^T(Ax^t-y)\right) \)
... a denoiser
Deep Learning in Inverse Problems
any latest and greatest NN denoiser

[Venkatakrishnan et al., 2013; Zhang et al., 2017b; Meinhardt et al., 2017; Zhang et al., 2021; Kamilov et al., 2023b; Terris et al., 2023]
[Gilton, Ongie, Willett, 2019]
Proximal Gradient Descent: \( x^{t+1} = {\color{red}f_\theta} \left(x^t - \eta A^T(A(x^t)-y)\right) \)
Option C: Implicit Priors
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ? and for what \(R(x)\)?
Deep Learning in Inverse Problems
\(\mathcal H_\text{prox} = \{f = \text{prox}_R\}\)
\(\mathcal H = \{f: \mathbb R^n \to \mathbb R^n\}\)
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ? and for what \(R(x)\)?
Question 2)
Can we estimate the "correct" prox?
Deep Learning in Inverse Problems
\(\mathcal H = \{f: \mathbb R^n \to \mathbb R^n\}\)
\(\mathcal H_\text{prox} = \{f = \text{prox}_R\}\)
\(\mathcal H = \{f: \mathbb R^n \to \mathbb R^n\}\)
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
Theorem [Gribonval & Nikolova, 2020]
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
\(R(x)\) need not be convex
Learned Proximal Networks
Take \(f_\theta(x) = \nabla \psi_\theta(x)\) for convex (and differentiable) \(\psi_\theta\)
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Theorem [Gribonval & Nikolova, 2020]
Interpretable Inverse Problems
Question 1)
When will \(f_\theta(x)\) compute a \(\text{prox}_R(x)\) ?
\(R(x)\) need not be convex
Learned Proximal Networks
Take \(f_\theta(x) = \nabla \psi_\theta(x)\) for convex (and differentiable) \(\psi_\theta\)
\( f(x) \in \text{prox}_R(x) ~\Leftrightarrow \exist ~ \text{convex l.s.c.}~ \psi: \mathbb R^n\to\mathbb R : f(x) \in \partial \psi(x)~\)
Theorem [Gribonval & Nikolova, 2020]
Interpretable Inverse Problems
If so, can you know for what \(R(x)\)?
Yes
[Gibonval & Nikolova]
Easy! \[{\color{grey}y^* =} \arg\min_{y} \psi(y) - \langle y,x\rangle {\color{grey}= \hat{f}_\theta^{-1}(x)}\]
Interpretable Inverse Problems
Question 2)
(we don't know \(p_x\)!)
Can we have the "right" prox?
\(f_\theta(y) = \text{prox}_R(y) = \texttt{MAP}(x|y)\)
Could we have \(R(x) = -\log p_x(x)\)?
A learning approach:
What loss function?
Interpretable Inverse Problems
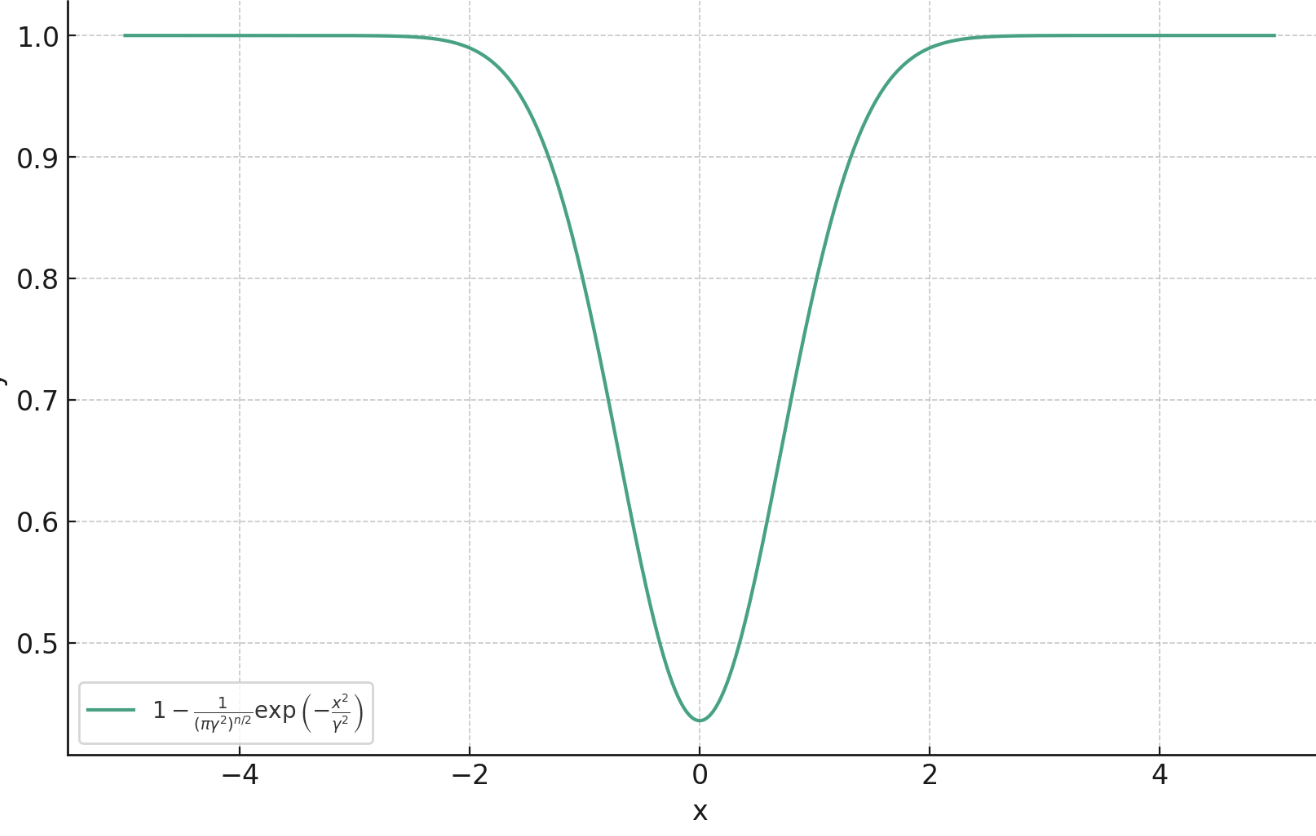
Theorem (informal)
Proximal Matching Loss
\(\gamma\)
Question 2)
Can we have the "right" prox?
\(f_\theta(y) = \text{prox}_R(y) = \texttt{MAP}(x|y)\)
Could we have \(R(x) = -\log p_x(x)\)?
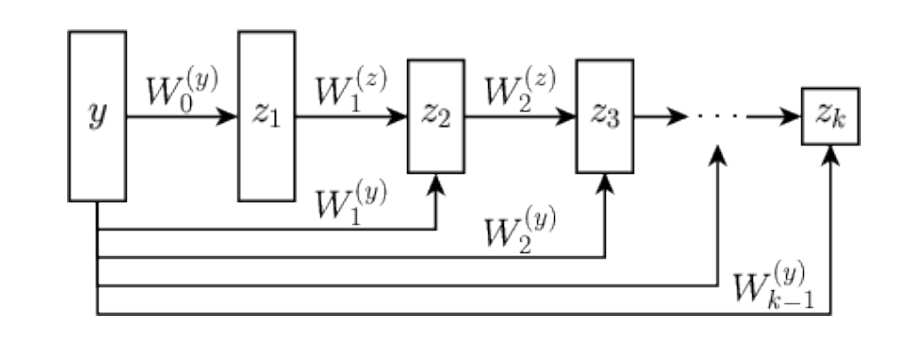
Learned Proximal Networks
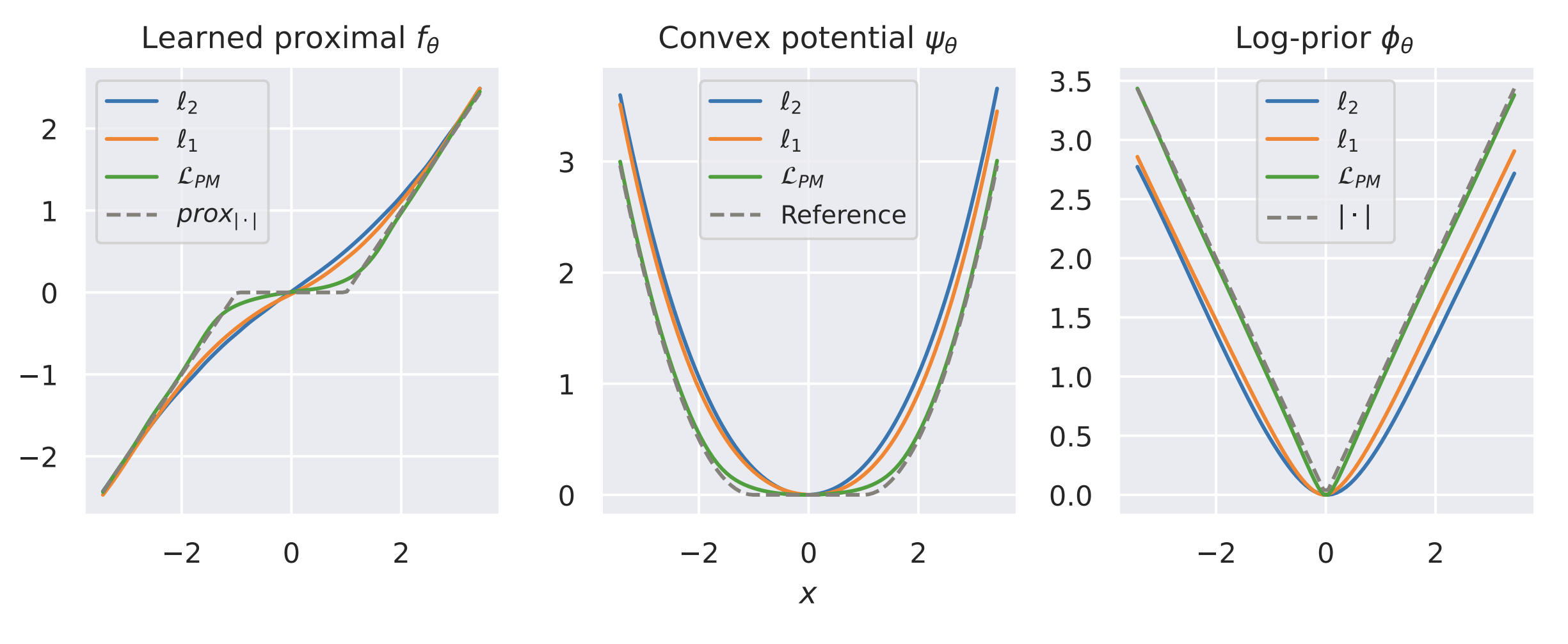
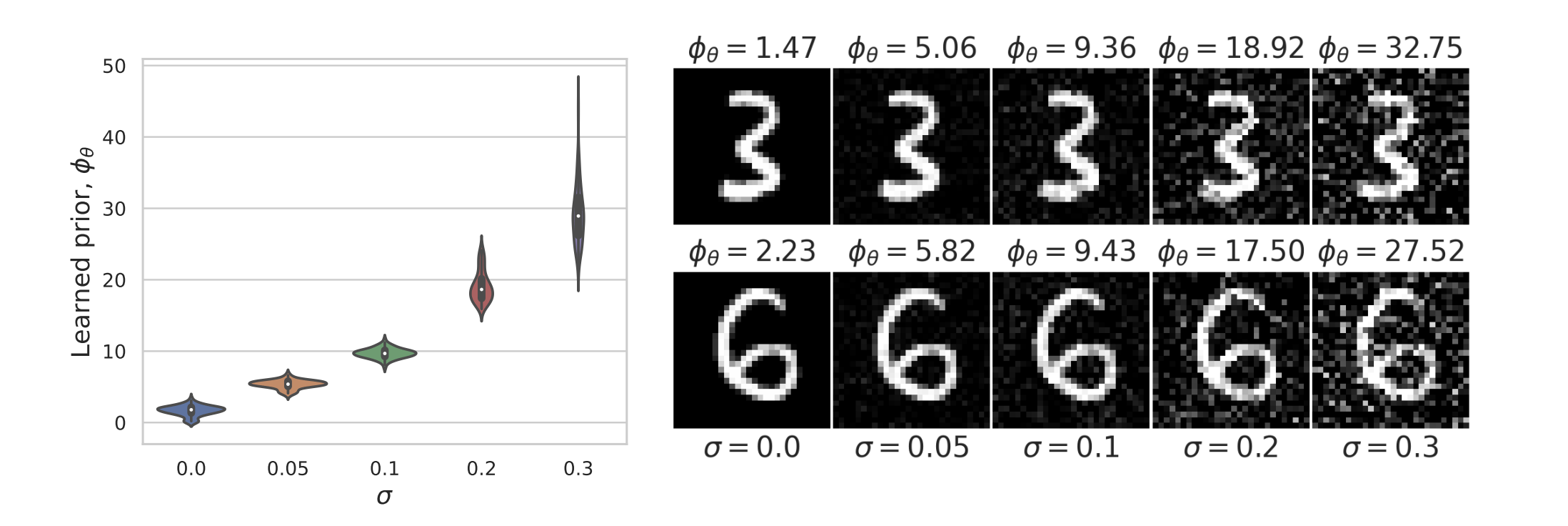
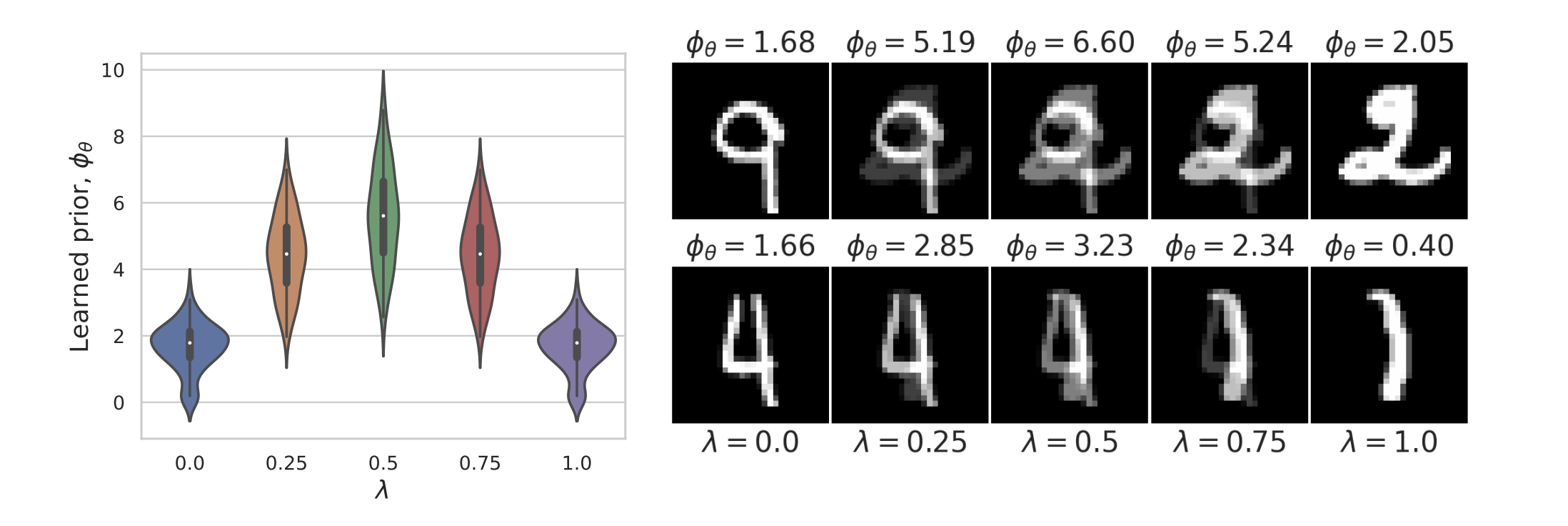
Learned Proximal Networks
Learned Proximal Networks
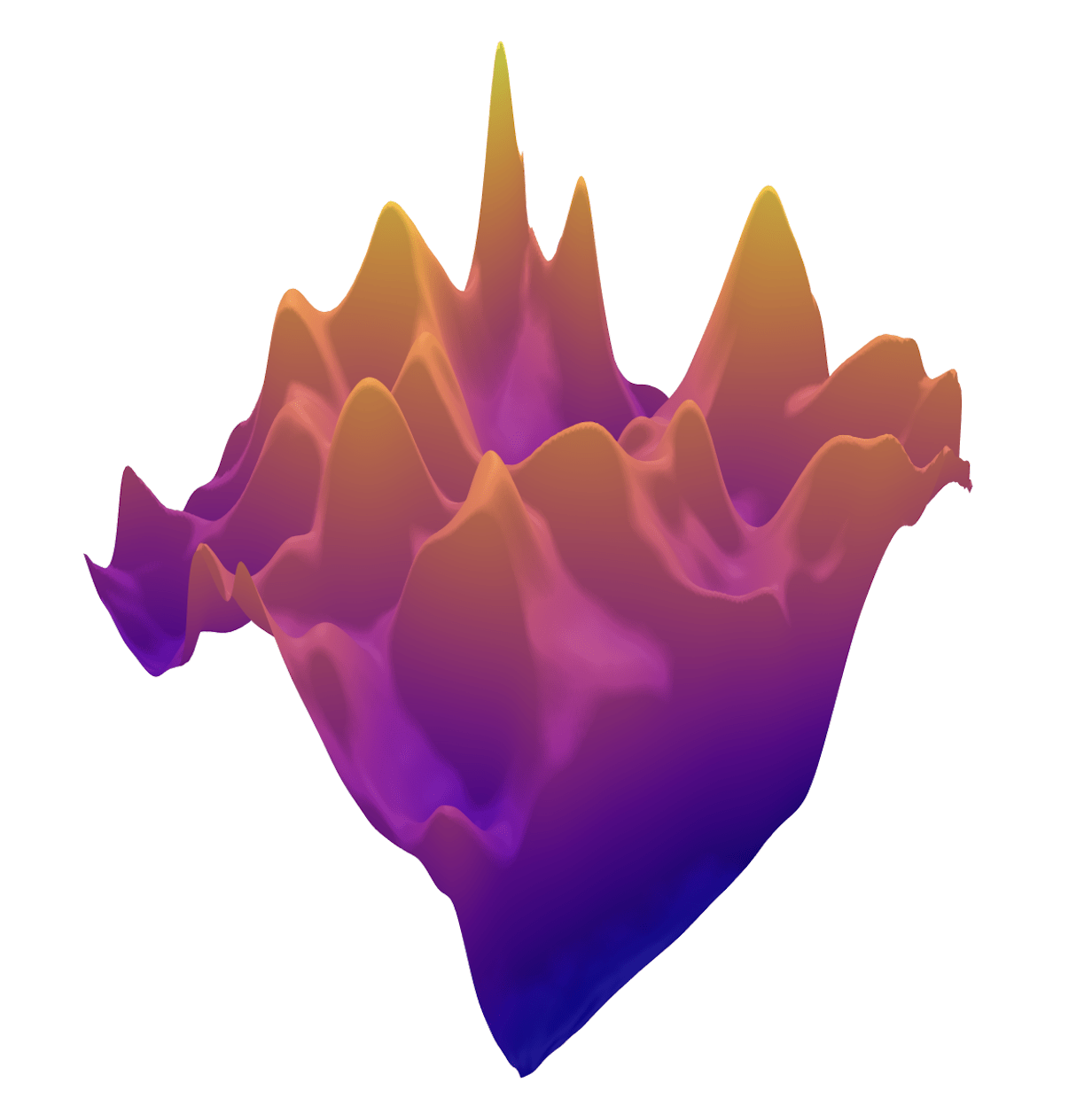
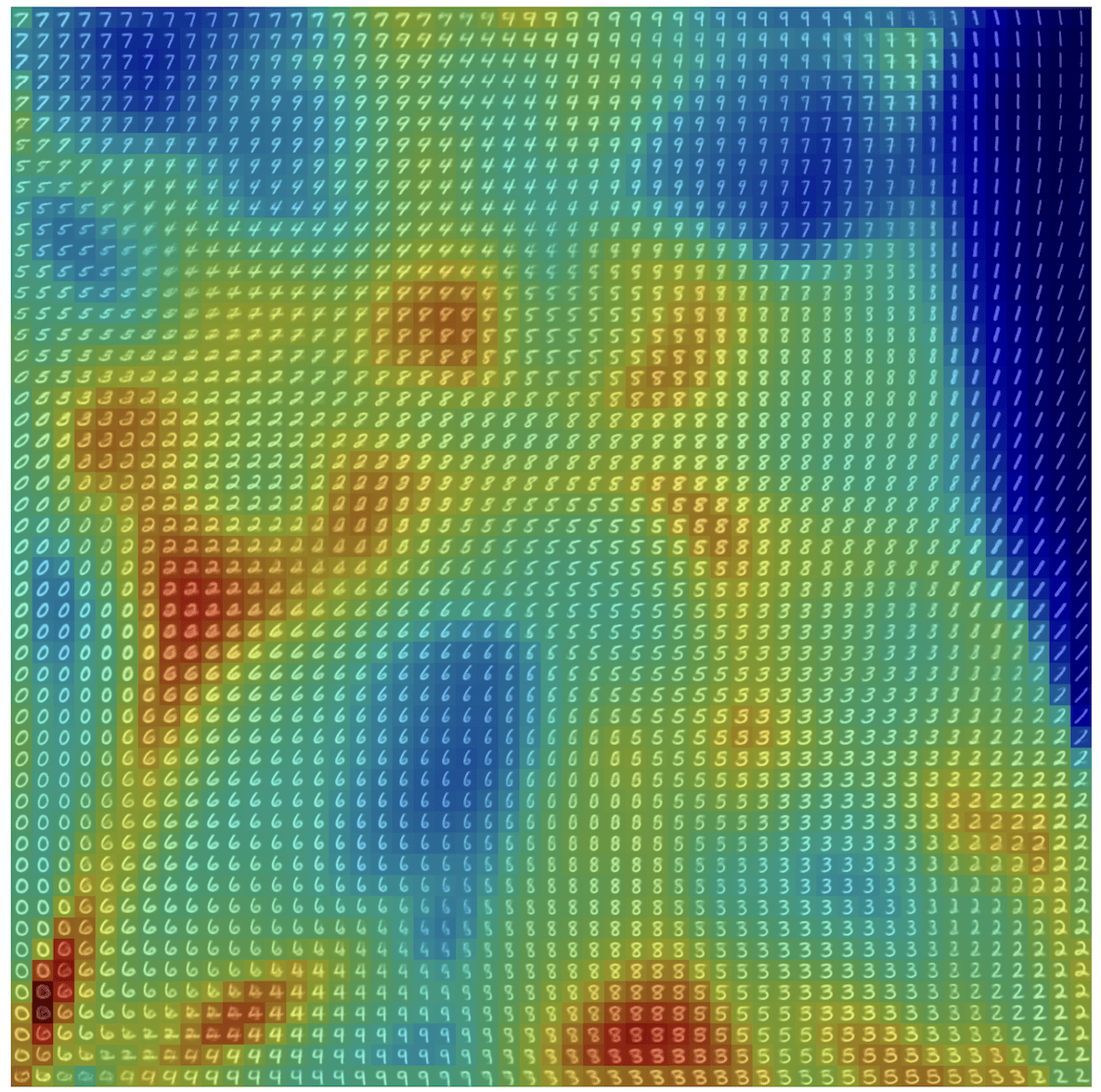
\(R(\tilde{x})\)
Learned Proximal Networks
Convergence guarantees for PnP
- [Sreehari et al., 2016; Sun et al., 2019; Chan, 2019; Teodoro et al., 2019]
Convergence of PnP for non-expansive denoisers. -
[Ryu et al, 2019]
Convergence for close to contractive operators - [Xu et al, 2020]
Convergence of Plug-and-Play priors with MMSE denoisers -
[Hurault et al., 2022]
Lipschitz-bounded denoisers
Theorem (PGD with Learned Proximal Networks)
Let \(f_\theta = \text{prox}_{\hat{R}} {\color{grey}\text{ with } \alpha>0}, \text{ and } 0<\eta<1/\sigma_{\max}(A) \) with smooth activations
(Analogous results hold for ADMM)
Learned Proximal Networks
Convergence guarantees for PnP
Fang, Buchanan & S. What's in a Prior? Learned Proximal Networks for Inverse Problems. ICLR 2024.
Learned Proximal Networks
-
Learned proximal networks provide exact proximals for learned regularizers
-
Framework for general inverse problems and learned priors
-
Exciting open problems to provide guarantees for "black box" models with minimal guarantees
Concluding Remarks

...that's it!





Zhenghan Fang
JHU
Sam Buchanan
TTIC
Project Site
