A Tensor Playground:
a demonstration of \(\textsf{TensorSpace}\)
Joshua Maglione
jmaglione@math.uni-bielefeld.de
Universität Bielefeld

Began in 2015 and is still evolving.
Joint with Pete Brooksbank and James Wilson.
Funded in part by NSF: DMS-1620454.
\(\textsf{TensorSpace}\) refers to a collection of Magma packages:
- TensorSpace: data structures for tensors,
- Sylver: algorithms for simultaneous Sylvester equations,
- Densor: algorithms to construct linear closures of tensor spaces.
Constructing Tensors in \(\textsf{TensorSpace}\)
Flexible data structure for tensors
Goal: Want flexible definition for tensors.
Questions: Is a tensor more than just...
- a high-dimensional grid?
- a multilinear map?
How do the questions we want to answer motivate a data structure?
Examples require context
1. \(b\) bilinear form of \(V\). Interpret:
\(\langle b | : V \times V \rightarrowtail K\)
3. \(V\) an \(A\)-module. Interpret:
\(\langle \mu | : V \times A \rightarrowtail V\)
2. \(\psi\) an entangled system of qubits. Interpret:
\(\langle \psi | : \mathbb{C}^2\times \cdots \times \mathbb{C}^2 \rightarrowtail \mathbb{C}\)
Tensors in \(\textsf{TensorSpace}\) are framed
We require tensors to have three things:
1. frame: \((U_0, \ldots, U_n)\),
2. function: \(U_n\times \cdots \times U_1\rightarrowtail U_0\),
3. category*.
*We do not specify now, but we will come back to this.
A "default" category is assigned when not given.
Constructing a tensor from scratch
We construct the tensor
$$\begin{aligned} t : \text{M}_2(\mathbb{Q}) \times \text{M}_2(\mathbb{Q}) &\rightarrowtail \text{M}_2(\mathbb{Q}),\\ (A, B) &\mapsto AB \end{aligned}$$
We have two structures we define:
- frame: \((\text{M}_2(\mathbb{Q}),\; \text{M}_2(\mathbb{Q}),\; \text{M}_2(\mathbb{Q}))\),
- function: \((A, B)\mapsto AB\).
Q := Rationals();
A := MatrixAlgebra(Q, 2); // 2 x 2 matrices over Q
frame := [A, A, A];
frame;[
Full Matrix Algebra of degree 2 over Rational Field,
Full Matrix Algebra of degree 2 over Rational Field,
Full Matrix Algebra of degree 2 over Rational Field
]First we define our frame.
Require a function to map a tuple of matrices to their product.
mult := func< x | x[1]*x[2] >; // <A, B> |-> A*B
t := Tensor(frame, mult);
t;Tensor of valence 3, U2 x U1 >-> U0
U2 : Full Vector space of degree 4 over Rational Field
U1 : Full Vector space of degree 4 over Rational Field
U0 : Full Vector space of degree 4 over Rational FieldTensors as multilinear functions
Let's do a brief sanity check, and verify \(t\) does what we expect.
X := A![2, 2/5, 0, -1]; // define matrices
Y := A![0, -3, 5, 7]; // from sequences
X, Y;[ 2 2/5]
[ 0 -1]
[ 0 -3]
[ 5 7]X*Y, <X, Y> @ t;[ 2 -16/5]
[ -5 -7]
( 2 -16/5 -5 -7)
Recall, the print statement for \(t\): no matrix algebras
t;Tensor of valence 3, U2 x U1 >-> U0
U2 : Full Vector space of degree 4 over Rational Field
U1 : Full Vector space of degree 4 over Rational Field
U0 : Full Vector space of degree 4 over Rational Field
It states vector spaces, but we gave it matrices: \(X\) and \(Y\).
The frame gives context, so that we leave the typing to the machines.
<X, [0, -3, 5, 7]> @ t;
<0, [1, 1, 1, 1]> @ t;( 2 -16/5 -5 -7)
(0 0 0 0)Structure constants
We define a tensor of the form
$$ \langle t| : K^{d_n} \times \cdots \times K^{d_1} \rightarrowtail K^{d_0} $$
by \(d_0\cdots d_n\) elements in \(K\): a \((d_n\times \cdots \times d_0)\)-grid
$$ [t_{i_n\cdots i_1}^{i_0}]. $$
Notational challenge to do this for general \(n\). We do \(n=2\):
$$ (u, v)\mapsto \left( \sum_{i=1}^{d_2}\sum_{j=1}^{d_1} u_{i}t_{ij}^{1} v_{j}, \ldots, \sum_{i=1}^{d_2}\sum_{j=1}^{d_1} u_{i}t_{ij}^{d_0} v_{j}\right)\in K^{d_0}. $$
Let's construct an example.
d := [3, 2, 5, 4]; // dimensions of frame
grid := [1..3*2*5*4]; // ints 1, ..., 120
t := Tensor(Q, d, grid);
t;Tensor of valence 4, U3 x U2 x U1 >-> U0
U3 : Full Vector space of degree 3 over Rational Field
U2 : Full Vector space of degree 2 over Rational Field
U1 : Full Vector space of degree 5 over Rational Field
U0 : Full Vector space of degree 4 over Rational FieldWe verify that the structure constants of \(t\) are what we expect.
StructureConstants(t)[1..10]; // Only first 10 entries[ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 ]Notice: structure constants are a flat sequence.
The grid model provides easier understanding of data manipulation.
We describe 2 operations that potentially change the frame.
Slicing
Recall, our current tensor has the frame:
$$ \langle t | : \mathbb{Q}^3 \times \mathbb{Q}^2 \times \mathbb{Q}^5 \rightarrow \mathbb{Q}^4 $$
We grab any entry of the grid \([t_{i_n\cdots i_1}^{i_0}]\) and consider the corresponding sub-grid.
This can be interpreted as a tensor itself.
We query for the \(t_{3,2,5}^{4}\) constant:
ind := [{3}, {2}, {5}, {4}]; // last entry
Slice(t, ind);[ 120 ]We can query any sequence of indices.
indices := [{1, 3}, {2}, {1, 3, 4}, {4}]; // 2*1*3*1 entries
Slice(t, indices);[ 24, 32, 36, 104, 112, 116 ]The above example can be interpreted as a new tensor
$$ \langle s | : \mathbb{Q}^2 \times \mathbb{Q} \times \mathbb{Q}^3 \rightarrowtail \mathbb{Q}. $$
So it might be helpful to interpret the output as a matrix.
SliceAsMatrices(t, indices, 3, 1);[
[ 24 32 36]
[104 112 116]
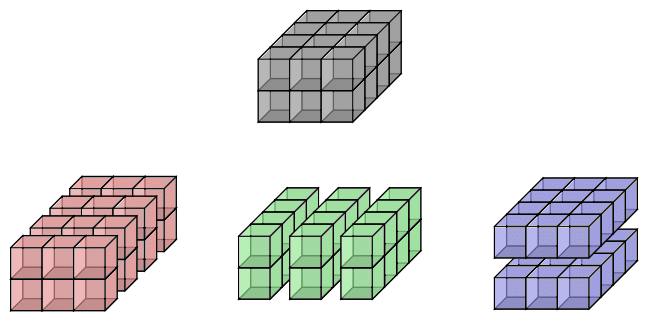
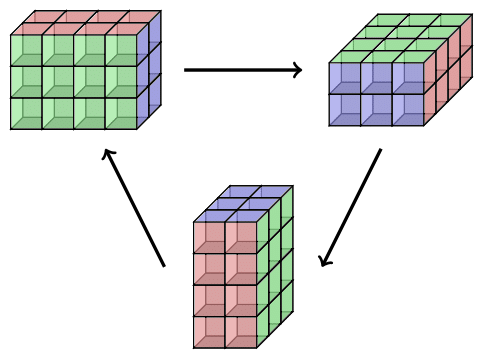
]Shuffling
We apply permutations to the frame. Suppose we are framed by vector spaces
$$ \langle t | : U_n \times \cdots \times U_1\rightarrowtail U_0. $$
For a permutation \(\sigma\) of \(\{0, \ldots, n\}\), a \(\sigma\)-shuffle of \(t\) is a tensor
$$ \langle \sigma(t) | : U_{\sigma(n)} \times \cdots \times U_{\sigma(1)} \rightarrowtail U_{\sigma(0)}. $$
Note: shuffling requires dual-spaces. \(\textsf{TensorSpace}\) handles this.
We continue with current example:
$$ \langle t | : \mathbb{Q}^3 \times \mathbb{Q}^2 \times \mathbb{Q}^5 \rightarrowtail \mathbb{Q}^4. $$
We apply the permutation \(\sigma = (0, 2, 3, 1)\).
sigma := [2, 0, 3, 1]; // cycle: (0, 2, 3, 1)
s := Shuffle(t, sigma);
s;Tensor of valence 4, U3 x U2 x U1 >-> U0
U3 : Full Vector space of degree 5 over Rational Field
U2 : Full Vector space of degree 3 over Rational Field
U1 : Full Vector space of degree 4 over Rational Field
U0 : Full Vector space of degree 2 over Rational FieldWe can take a look at the structure constants.
StructureConstants(s)[1..10]; // first 10 entries[ 1, 3, 5, 7, 25, 27, 29, 31, 49, 51 ]Recall: the structure constants were \([1, \ldots, 120]\).
Algebras associated to tensors
These definitions work in greater generality, but fix a \(K\)-bilinear map
$$ \langle t | : U\times V\rightarrowtail W. $$
Set \(\Omega = \text{End}(U)\times \text{End}(V)\times \text{End}(W)\). Our algebras are subsets of \(\Omega\).
The first algebra we define is the centroid, and the second is the derivation algebra.
$$ \begin{aligned} \mathcal{C}_t &= \{ (X, Y, Z) \in\Omega \mid \forall u, v,\; \langle t | Xu, v\rangle = \langle t | u, Yv\rangle = Z\langle t | u, v\rangle \} \\ \mathcal{D}_t &= \{ (X, Y, Z) \in \Omega \mid \forall u, v,\; \langle t | Xu, v\rangle + \langle t | u, Yv\rangle = Z\langle t | u, v\rangle \} \end{aligned} $$
Fact. \(\mathcal{C}_t\) is a \(K\)-algebra with \(1\), and \(\mathcal{D}_t\) is a Lie algebra.
Example from quantum info. theory
The GHZ and W states
The Greenberger-Horne-Zeilinger (GHZ) state is
$$ \begin{aligned} \sqrt{2} \cdot GHZ &= |000\rangle + |111\rangle \\ &\equiv (e_1\otimes e_1\otimes e_1) + (e_2\otimes e_2\otimes e_2) \\ &\equiv \begin{bmatrix} (1,0) & (0,0) \\ (0,0) & (0,1) \end{bmatrix}. \end{aligned} $$
The W state is
$$ \begin{aligned} \sqrt{3} \cdot W &= |001\rangle + |010\rangle + |100\rangle \\ &\equiv (e_1\otimes e_1\otimes e_2) + (e_1\otimes e_2\otimes e_1) + (e_2\otimes e_1\otimes e_1) \\ &\equiv \begin{bmatrix} (0,1) & (1,0) \\ (1,0) & (0,0) \end{bmatrix}. \end{aligned} $$
Both states are \((2\times 2\times 2)\)-grids. We interpret these states as
$$ \begin{aligned} \langle GHZ| &: \mathbb{C}^2\times \mathbb{C}^2 \rightarrowtail \mathbb{C}^2 , \\ \langle W| &: \mathbb{C}^2\times \mathbb{C}^2 \rightarrowtail \mathbb{C}^2 \end{aligned} $$
(Typically interpreted as \(\mathbb{C}^2 \times \mathbb{C}^2 \times \mathbb{C}^2 \rightarrowtail \mathbb{C}\).)
Question: \(GHZ\) and \(W\) are contained in the same space. Maybe there is a change of basis (of each \(\mathbb{C}^2\)) that makes GHZ and W equivalent?
(There isn't!)
Let's construct the tensors (over \(\mathbb{Q}\)).
Q := Rationals();
d := [2, 2, 2]; // dimensions of frame
GHZ := Tensor(Q, d, [1, 0, 0, 0, 0, 0, 0, 1]);
W := Tensor(Q, d, [0, 1, 1, 0, 1, 0, 0, 0]);Quick sanity check.
AsMatrices(GHZ, 2, 1);[
[1 0]
[0 0],
[0 0]
[0 1]
]Now we compute their centroids.
C_GHZ := Centroid(GHZ);
C_W := Centroid(W);
C_GHZ, C_W;Matrix Algebra of degree 6 with 2 generators over Rational Field
Matrix Algebra of degree 6 with 2 generators over Rational Field[
[1 0 0 0 0 0]
[0 1 0 0 0 0]
[0 0 1 0 0 0]
[0 0 0 1 0 0]
[0 0 0 0 1 0]
[0 0 0 0 0 1],
[0 1 0 0 0 0]
[0 0 0 0 0 0]
[0 0 0 1 0 0]
[0 0 0 0 0 0]
[0 0 0 0 0 0]
[0 0 0 0 1 0]
]Basis(C_W);Let's play around with \(\mathcal{C}_W\).
M := C_W.1 + C_W.2; // an element of the ring
M;[1 1 0 0 0 0]
[0 1 0 0 0 0]
[0 0 1 1 0 0]
[0 0 0 1 0 0]
[0 0 0 0 1 0]
[0 0 0 0 1 1]We can get the individual blocks.
X := M @ Induce(C_W, 2); // build map
Y := M @ Induce(C_W, 1); // for each
Z := M @ Induce(C_W, 0); // coordinate
Z;
[1 0]
[1 1]Build two vectors from our \(2\)-dimensional vector space
V := VectorSpace(Q, 2);
u := V![-1, 22/7];
v := V![1/2, 4/27];
u, v;( -1 22/7)
( 1/2 4/27)<u*X, v> @ W eq <u, v*Y> @ W; // 1st eqn
<u, v*Y> @ W eq (<u, v> @ W)*Z; // 2nd eqntrue
trueWe distinguish \(W\) and \(GHZ\) by the nilpotent elements of their centroids.
J_GHZ := JacobsonRadical(C_GHZ);
J_W := JacobsonRadical(C_W);
Dimension(J_GHZ), Dimension(J_W);Because the dimension of \(J(GHZ)\) is different from \(J(W)\) these states are inequivalent.
With a little work, one shows that
$$ \begin{aligned} \mathcal{C}_{GHZ} &\cong \mathbb{C}^2, & \mathcal{C}_{W} &\cong \mathbb{C}[x]/\left(x^2\right). \end{aligned} $$
0 1Oh, and just by wiggling your pinky...
The derivation algebras bring their differences to the surface.
D_GHZ := DerivationAlgebra(GHZ);
D_W := DerivationAlgebra(W);
Dimension(D_GHZ), Dimension(D_W);$$ \dim_{\mathbb{C}}(\mathcal{D}_{GHZ}) = 4 \ne 5 = \dim_{\mathbb{C}}(\mathcal{D}_{W}). $$
4 5Because the dimensions of the derivation algebras are different, \(GHZ\) and \(W\) states are inequivalent.
What is really happening?
The equation \(\langle t | Xu, v\rangle = \langle t | u, Yv\rangle\) becomes
$$ XT^{(k)}_{**} - T^{(k)}_{**}Y = 0, $$where \(T^{(k)}_{**}\) is the \(k\)th slice in the \(0\)-coordinate as a matrix:
$$ T_{**}^{(k)} = \begin{bmatrix} t_{11}^{k} & t_{12}^{k} & \cdots \\ t_{21}^{k} & t_{22}^{k} & \cdots \\ \vdots & \vdots & \ddots \end{bmatrix} $$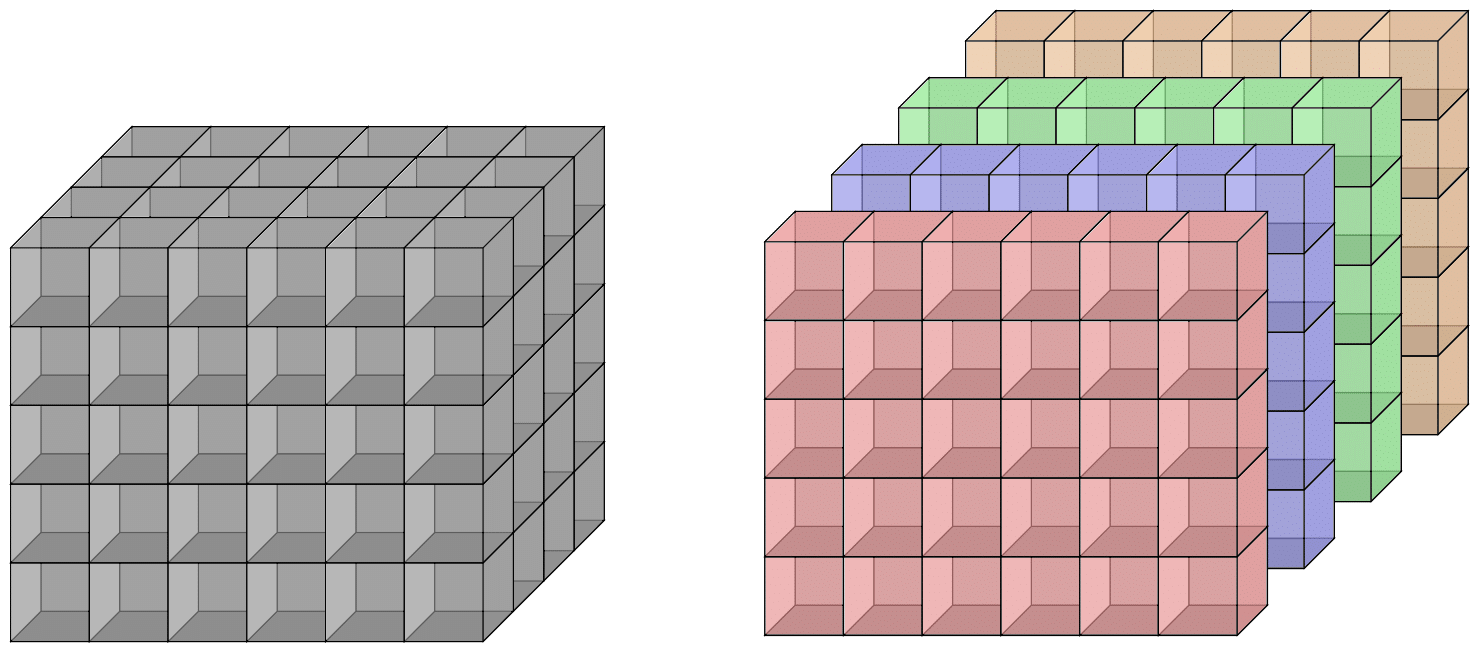
The equation \(\langle t | Xu, v\rangle = Z\langle t | u, v\rangle\) becomes
$$ XT^{*}_{*j} - T^{*}_{*j}Z = 0, $$where \(T^{*}_{*j}\) is the \(j\)th slice in the \(1\)-coordinate as a matrix:
$$ T_{*j}^{*} = \begin{bmatrix} t_{1j}^{1} & t_{1j}^{2} & \cdots \\ t_{2j}^{1} & t_{2j}^{2} & \cdots \\ \vdots & \vdots & \ddots \end{bmatrix} $$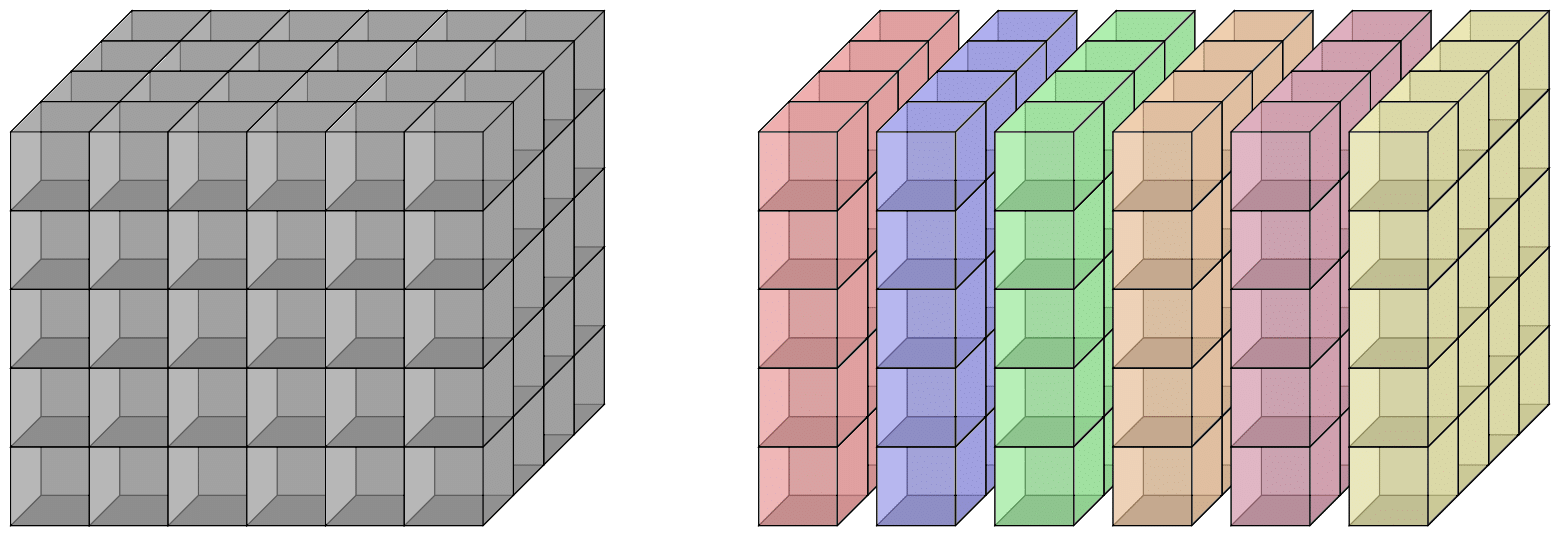
Solving simultaneous Sylvester systems: \(\textsf{Sylver}\)
These algorithms are part of a general family of Sylvester-like equations:
$$ XA + BY = C. $$We need to solve a simultaneous system of Sylvester-like equations.
Naively, this requires \(O(d^7)\) field operations for a \((d\times d\times d)\)-grid.
In general, construct a basis of the kernel of a
\((d_0\cdots d_n) \times (d_0^2 +\cdots + d_n^2)\)-matrix.
Open: Extend this to general tensors and implement.
Tensor spaces & tensor categories
Tensor spaces are the spaces containing tensors. Therefore, defined similarly to tensors.
A tensor space \(T\) is a \(K\)-vector space with
1. a frame \((U_0, \ldots, U_n)\),
2. an interpreter map \(\langle \cdot | : T\rightarrow \left( U_n\times \cdots \times U_1\rightarrowtail U_0\right)\),
3. a category,
4. a basis.
The map \(\langle \cdot |\) gives every \(t\in T\) a multilinear map interpretation
$$ \langle t | : U_n\times \cdots \times U_1\rightarrowtail U_0. $$
Examples that hint towards tensor categories
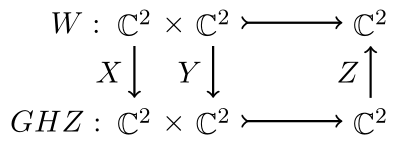
Equivalence up to a change of bases. The states \(GHZ\) and \(W\) are inequivalent.
For all \(X, Y, Z\in \text{GL}_2(\mathbb{C})\), there exists \(u, v\in\mathbb{C}^2\) such that
$$ \begin{aligned} Z\langle GHZ | Xu, Yv\rangle \ne \langle W | u, v \rangle. \end{aligned} $$
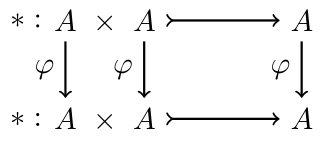
Equivalence of algebras: an isomorphism.
There exists \(\varphi\in\text{GL}(A)\) such that for all \(a,b\in A\)
$$ \begin{aligned} \varphi(ab) &= \varphi(a)\varphi(b). \end{aligned} $$
Adjoint operators of a bilinear form \(\langle\,,\,\rangle\).
For \(u,v\in V\), and \(A\in \text{GL}(V)\),
$$ \begin{aligned} \langle Au, v \rangle &= \langle u, A^*v\rangle. \end{aligned} $$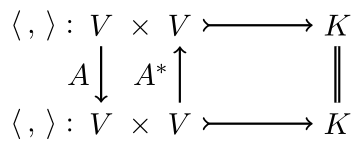
A data structure for tensor categories
For us a tensor category is
1. a function \(\textsf{A}: [n] \rightarrow \{-1, 0, 1\}\),
2. a partition of \([n]\).
The function \(\textsf{A}\) tells us which way the arrows go: \(\downarrow\), \(\parallel\), or \(\uparrow\).
The partition tells us which coordinates are treated as equal.
Examples in \(\textsf{TensorSpace}\)
Let's look at a tensor created earlier: the multiplication in an algebra
$$ \langle t | : \text{M}_2(\mathbb{Q}) \times \text{M}_2(\mathbb{Q}) \rightarrowtail \text{M}_2(\mathbb{Q}). $$
A := MatrixAlgebra(Q, 2);
t := Tensor(A);
TensorCategory(t);Tensor category of valence 3 (->,->,->) ({ 0, 1, 2 })- all arrows are \(\downarrow\), and
- an operator acts the same way in all three coordinates.
Let's look at an example as a high-dimensional grid.
t := Tensor(GF(2), [2, 3, 2, 3], [1..36]);
t;Tensor of valence 4, U3 x U2 x U1 >-> U0
U3 : Full Vector space of degree 2 over GF(2)
U2 : Full Vector space of degree 3 over GF(2)
U1 : Full Vector space of degree 2 over GF(2)
U0 : Full Vector space of degree 3 over GF(2)The default tensor category is given.
TensorCategory(t); // default categoryTensor category of valence 4 (->,->,->,->) ({ 1 },{ 2 },{ 0 },{ 3 })Relating tensor spaces & operators
Densor subspaces
The \(GHZ\) and \(W\)-state are not equivalent because derivations were not isomorphic.
For these kinds of questions, we consider spaces of all tensors sharing common operators.
Recall the derivation algebra of \(t\in T\),
$$ \begin{aligned} \mathcal{D}_t &= \{ (X, Y, Z) \in \Omega \mid \forall u, v,\; \langle t | Xu, v\rangle + \langle t | u, Yv\rangle = Z\langle t | u, v\rangle\} \end{aligned} $$
For \(t\in T\), the densor subsapce of \(t\) is the tensor subspace
$$ \textsf{Dens}(t) = \{ s\in T \mid \mathcal{D}_t \subseteq \mathcal{D}_s \}. $$
Example from Lie algebras
Lie algebra of \(3\times 3\) trace zero matrices over a field \(K\), denoted \(\mathfrak{sl}_3\).
The tensor given by the matrix commutator is the following.
K := GF(7);
sl3 := LieAlgebra("A2", K);
t := Tensor(sl3);
t; Tensor of valence 3, U2 x U1 >-> U0
U2 : Full Vector space of degree 8 over GF(7)
U1 : Full Vector space of degree 8 over GF(7)
U0 : Full Vector space of degree 8 over GF(7)Note the tensor category.
TensorCategory(t);Tensor category of valence 3 (->,->,->) ({ 0, 1, 2 })Each operator acts the same on each of the three coordinates.
From standard results, \(\mathcal{D}_t \cong \mathfrak{sl}_3\).
D := DerivationAlgebra(t);
Dimension(D);8The densor subspace of \(t\) is computed using \(\textsf{Densor}\).
Dens := UniversalDensorSubspace(t);
Dens;Tensor space of dimension 2 over GF(7) with valence 3
U2 : Full Vector space of degree 8 over GF(7)
U1 : Full Vector space of degree 8 over GF(7)
U0 : Full Vector space of degree 8 over GF(7)The dimension of the densor subspace is tiny compared to the ambient space.
T := Parent(t); // full tensor space of t
Dimension(T), Dimension(Dens);512 2What just happened?
Example: matrix multiplication
The tensor space \(T\) framed by \((K^{12}, K^8, K^6)\) contains
$$ \langle t | : \text{M}_{3\times 4} \times \text{M}_{4\times 2} \rightarrowtail \text{M}_{3\times 2}. $$t := MatrixTensor(Q, [3, 4, 2]);
t;Tensor of valence 3, U2 x U1 >-> U0
U2 : Full Vector space of degree 12 over Rational Field
U1 : Full Vector space of degree 8 over Rational Field
U0 : Full Vector space of degree 6 over Rational FieldThe derivation algebra of \(t\) is large because matrix multiplication is distributive.
Recall the derivation equation:
$$ \langle t | Xu, v\rangle + \langle t | u, Yv \rangle = Z\langle t | u, v \rangle $$
If \(X\in \text{M}_{3\times 3}\), then we re-interpret
$$ (XU)*V + U*(0V) = X(U*V). $$
Similar equations hold for \(Y\in\text{M}_{4\times 4}\) and \(Z\in\text{M}_{2\times 2}\).
Therefore, \(\text{M}_{3\times 3} \cup \text{M}_{4\times 4} \cup \text{M}_{2\times 2} \subseteq \mathcal{D}_t\).
We denote the algebra \(\text{M}_{n\times n}\) with the matrix commutator by \(\mathfrak{gl}_n\).
Fact. \(\mathcal{D}_t \cong \left(\mathfrak{gl}_3\oplus \mathfrak{gl}_4 \oplus\mathfrak{gl}_2\right)/K\).
D := DerivationAlgebra(t);
Dimension(D) eq (3^2 + 4^2 + 2^2 - 1); // compare dimensionsWe can easily verify that the dimensions match.
trueDens := UniversalDensorSubspace(t);
Dens;Tensor space of dimension 1 over Rational Field with valence 3
U2 : Full Vector space of degree 12 over Rational Field
U1 : Full Vector space of degree 8 over Rational Field
U0 : Full Vector space of degree 6 over Rational FieldWith derivaton algebra so large, the densor subspace must be small.
Therefore, in a \(576\)-dimensional space, \(T\), matrix multiplication is set apart from the rest.
As a consequence, the symmetries of \(t\) are completely determined by its derivations.
How are densor spaces computed?
A dual solve to derivations
Recall, we consider Sylvester-like systems of the form:
$$ XT_{**}^{(k)} + T_{**}^{(k)}Y = 0 $$
The same system is used to get the densor subspace$-$the roles are swapped.
We are given the derivation algebra, so we slice a symbolic tensor.
Simultaneously solve a "dual" version of the Sylvester-like equations.
Theorem. (Brooksbank-M.-Wilson)
There exists an algorithm to simultaneously solve a "dual" Sylvester-like system using \(O(d^9m^2)\) field operations, given \(m\) operators acting on a \((d\times d\times d)\)-grid.
Open: Does a similar improvement apply for these equations as well? What is the resulting complexity?
Summary
- Still uncovering new algebraic data from tensors, and this is a snapshot of \(\textsf{TensorSpace}\).
- Context through the frame and tensor category give flexibility in the data structures.
- These algebras provide general tools to different kinds of applications.