Computational Anatomy and PDE
Klas Modin
Outline
- Background
- EPDiff equation
- New gradient flow PDE
Background
Part 1


MR camera
CT scanner
Radiology or medical imaging is in the middle of a digital or computer revolution that is affecting all of science and its various fields, including medicine
– Nick Bryan, Radiological Society of North America
- Better understanding of disease
- Tool to facilitate diagnosis
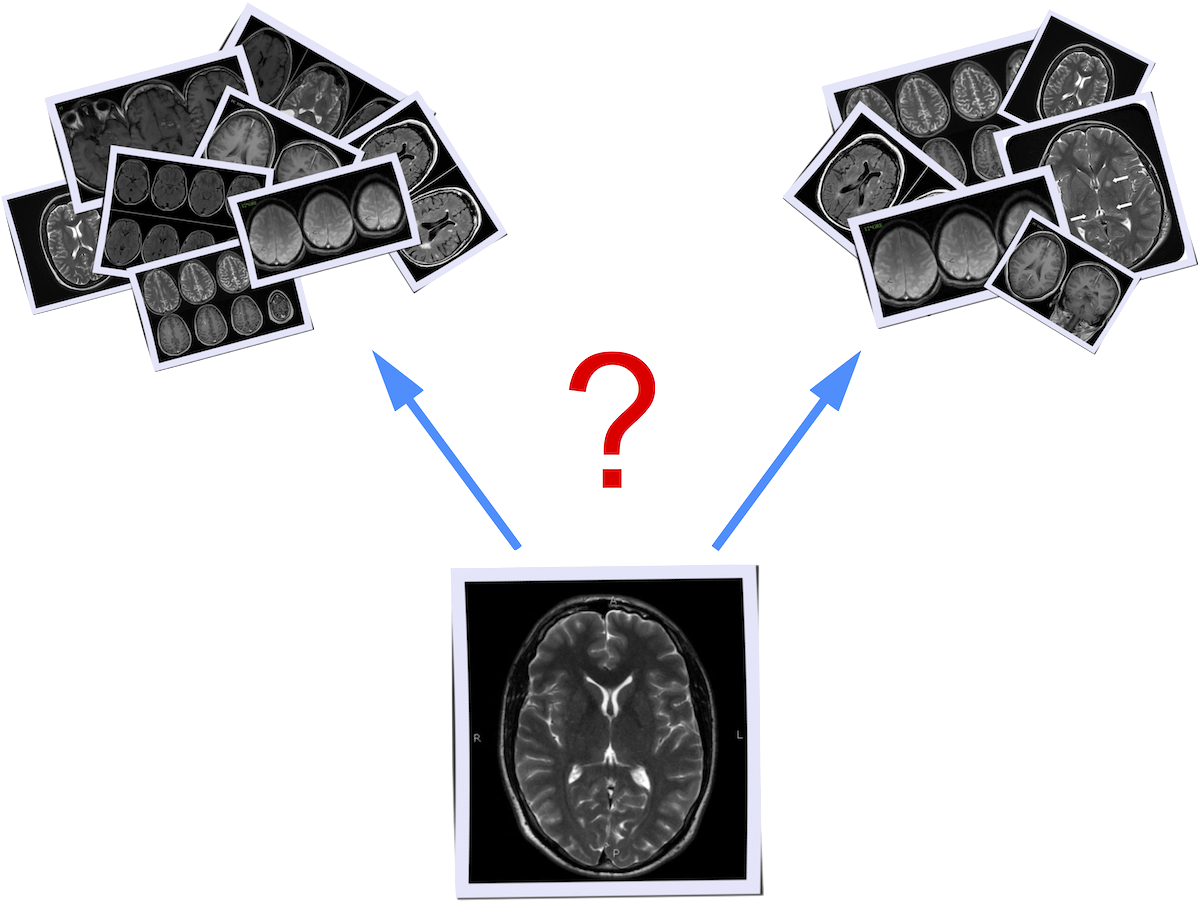
What is `distance` between images?
Riemannian geometry: distance in curved space
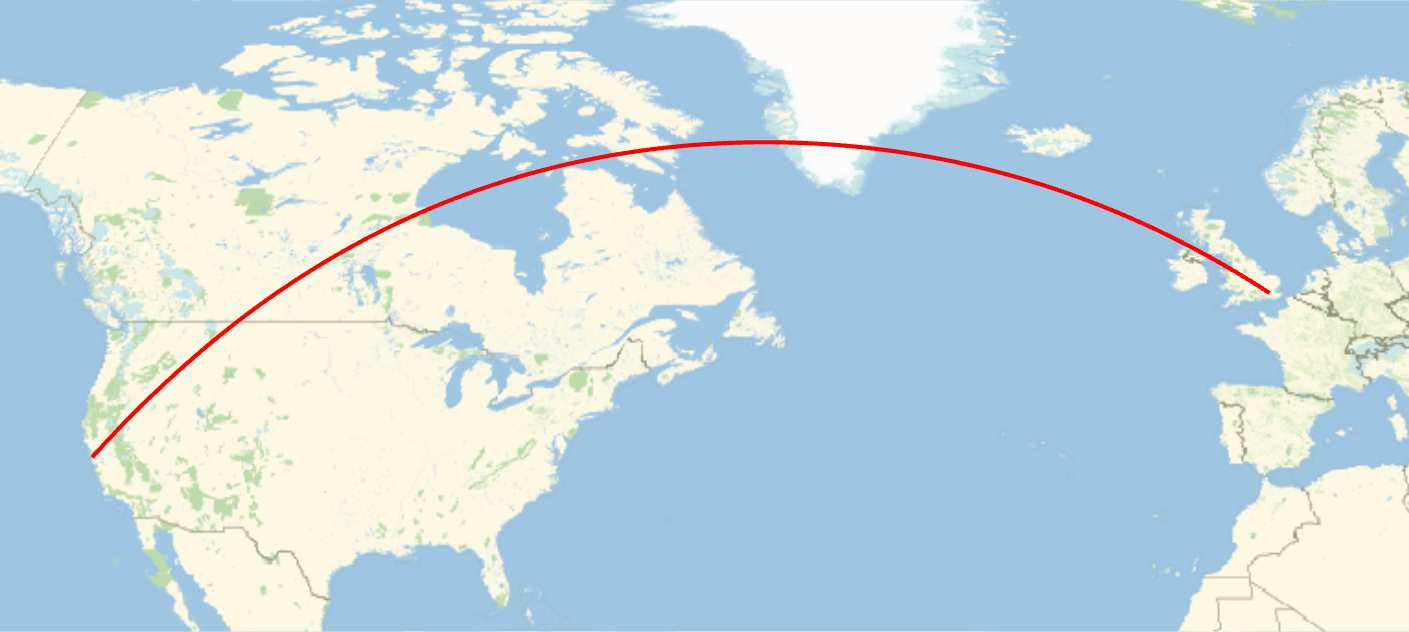
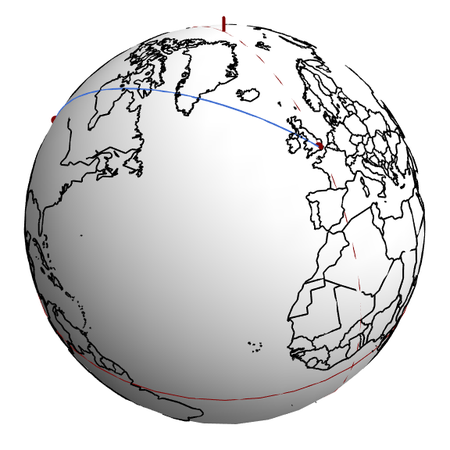
Exemple: great circles (2d)
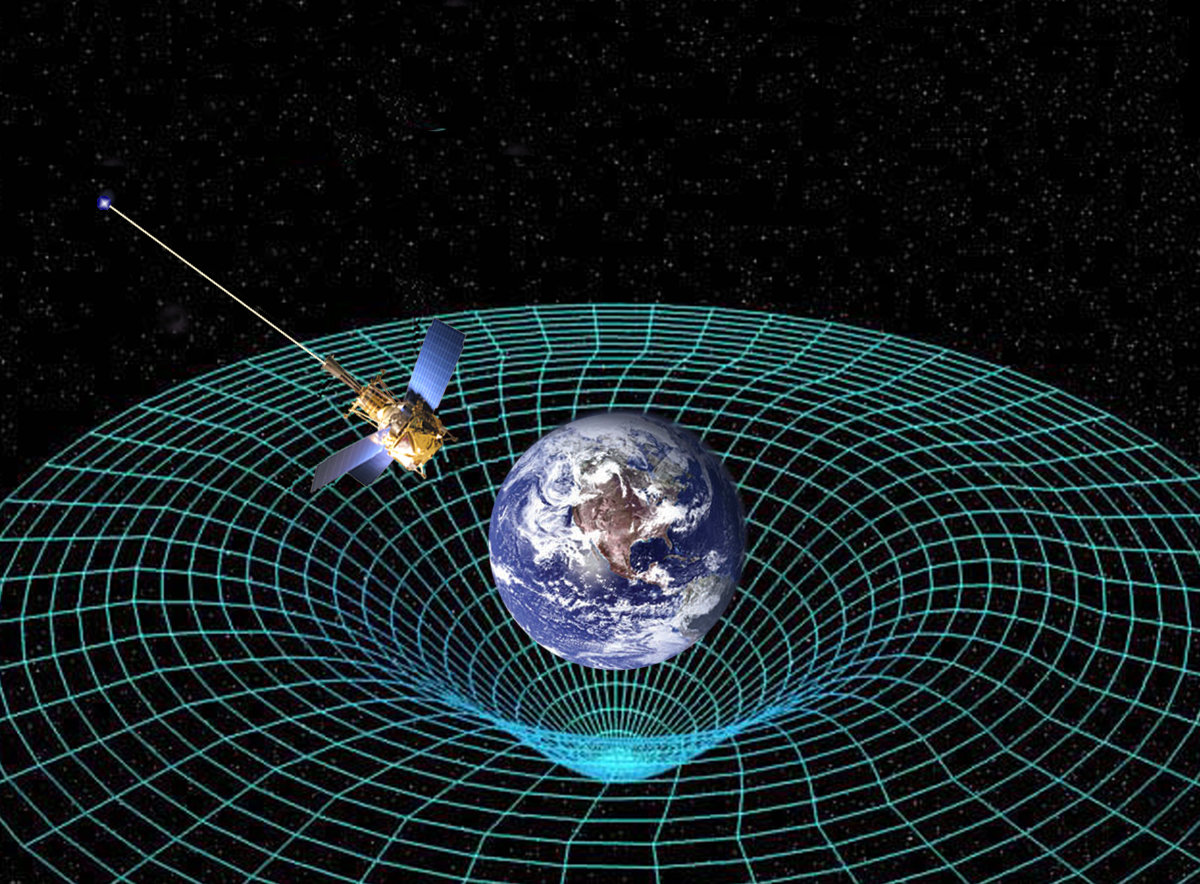
Exemple: Einstein's space-time (4d)
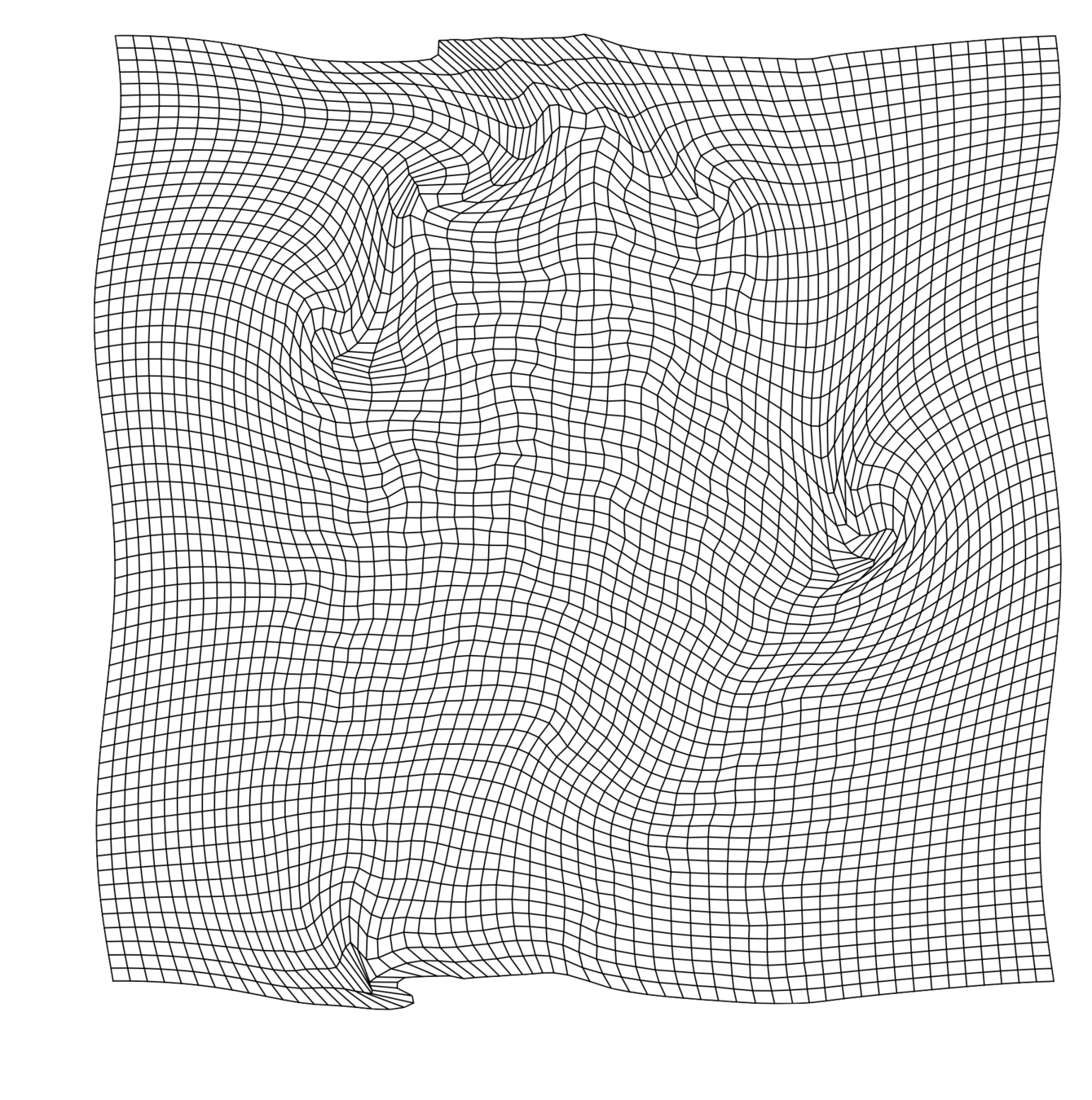
Exemple: space of diffeomorphisms (∞-dim)
Image dist = Riemannian dist between \(\varphi\) and \(\mathrm{id}\)


What is computational anatomy?
- Use Riemannian geometry on inf-dim manifold of diffeomorphisms to solve registration problems
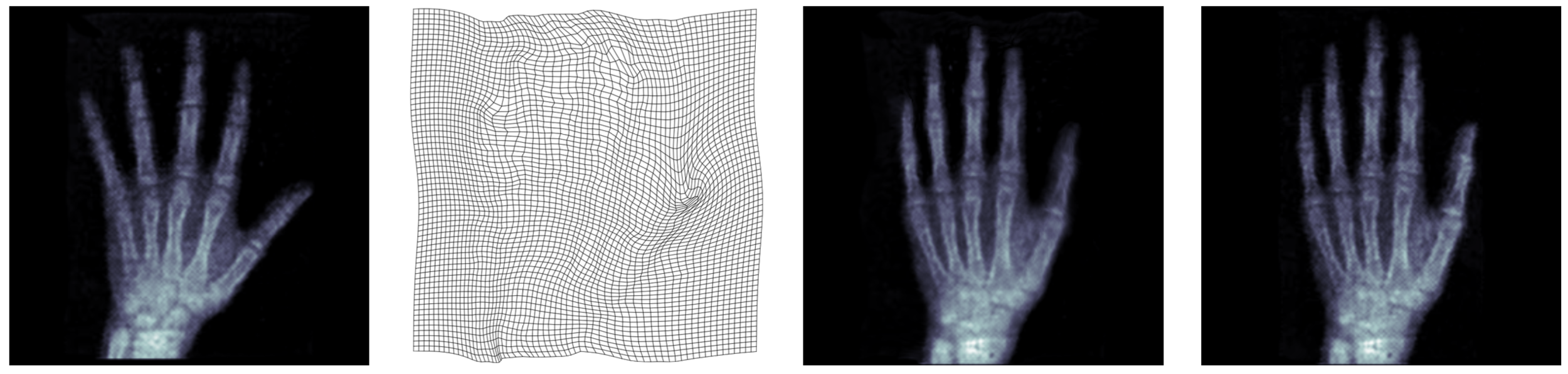
(a) Template
(b) Warp
(c) Transformed
(d) Target

History of computational anatomy
EPDiff equation
Part 2



Diffeomorphic image registration
- Image domain \(\Omega\)
- Template image \(I_0: \Omega \to \mathbb{R}_+ \)
- Target image \(I_1:\Omega\to \mathbb{R}_+\)



Ill-posed with noise!
Large deformation diffeomorphic metric matching (LDDMM)
\(\varphi(1)\) related to \(v\) by
Norm \( || \cdot||_\mathcal{A} \) given by
Euler-Lagrange equations
\(\Longrightarrow\) EPDiff equation
- Velocity \(v:[0,1]\times\Omega\to\mathbb{R}^n\)
- Momentum \(m:[0,1]\times\Omega\to\mathbb{R}^n \)
Numerical approach for LDDMM
- Steepest descent over time-dependent vector fields
- EPDiff IVP solver using particle methods (solitons)
- Use shooting over initial velocity \(v_0\) to minimize
Result: excellent! (but computationally expensive)
Open problems
- Develop FE discretization for EPDiff IVP
- Develop FE discretization for LDDMM
- Adaptive FE
- Numerical convergence analysis
*images by Matteo Molteni
New gradient flow PDE
Part 3

Deformation gradient flows
Right-invariant metric on \(\mathrm{Diff}(\Omega)\) defined by \(\mathcal A\)
Minimization problem
Origin of expensiveness: no formula for \(d_\mathrm{Diff}\)
Regularization penalizing change of volume
\(\mathrm{Diff}(\Omega)\) acts on \(Q = C^{\infty}(\Omega)\times \mathrm{Dens}(\Omega) \)
\( E(\varphi) = F_{q_1}(\varphi\cdot q_0)\) where \(q_i = (I_i,dx)\)
Gradient flow is
Lie-Euler method
Toy example (2D)
Open problem
- Develop moving mesh FE discretization for gradient flow PDE
Course project
slides available at slides.com/kmodin/cmm-kristineberg