Geometric hydrodynamics in
Klas Modin
Topics
- Motion of ideal fluids
- Arnold's geometric insight
- What's special about flatland?
- Yudovich's existence result
- Onsager's statistical hydrodynamics
- Long-time problem of long-time behavior
- Quantization and Zeitlin's model


Geometry of the Euler equations

Euler's equations describe Riemannian geodesics on
But how?
Riemannian metrics on Lie groups
Riemannian metrics on Lie groups
"Right-invariant" Riemannian metric determined by inner product on \(\mathfrak{g}\)
Governing equations

\(G\)
\(T_eG\simeq\mathfrak g\)
Euler-Arnold
(Lie-Poisson)
Euler-Lagrange
Yudovich
Simple example: free rigid body
Inner product: moments of inertia tensor \(\mathbb{I}\)
Arnold's example: Euler equations
Inner product:
Arnold's theorem: \(\gamma(t)\in \operatorname{Diff}_\mu(M)\) geodesic curve \(\Rightarrow\) vector field \(v(t) = \dot\gamma(t)\circ\gamma(t)^{-1}\) fulfills Euler's equations
But in what sense is \(\operatorname{Diff}_\mu(M)\) a Lie group?
Manifold structure of \(\operatorname{Diff}^s(M)\)
Thm [Palais, Omori, Ebin, Ebin and Marsden]
\(\operatorname{Diff}^s(M)\) is smooth Hilbert manifold if \(s>\operatorname{dim}(M)/2+1\)
\(\operatorname{Diff}^s_\mu(M)\) is a submanifold
What about Lie group structure?
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
What about Lie group structure?
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
What about Lie group structure?
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
What about Lie group structure?
Thm [Ebin]
\(\operatorname{Diff}^s(M)\) topological group if \(s>\operatorname{dim}(M)/2+1\)
Group structure:
Failure of smoothness (illustration):
Compute derivative of left translation \(L_\varphi(\eta) = \varphi\circ\eta\)
"Fix" the Lie group structure
Option 1
Use Fréchet manifolds instead
- Pros: proper Lie group structure
- Cons: no Picard iterations
Option 2
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
"Fix" the Lie group structure
Option 1
Use Fréchet manifolds instead
- Pros: proper Lie group structure
- Cons: no Picard iterations
Option 2
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
"Fix" the Lie group structure
Option 1
Use Fréchet manifolds instead
- Pros: proper Lie group structure
- Cons: no Picard iterations
Option 2
Right translation \(R_\varphi(\eta) = \eta\circ\varphi\)
So, let's work only with right translation
Crazy idea, but it works!
Simple example of how it works
Camassa-Holm equation
Why PDE not ODE?
Idea: [Ebin and Marsden] maybe geodesic equation on \(T\operatorname{Diff}^s(S^1)\) is an ODE
Camassa-Holm as geodesic equation
Camassa-Holm as geodesic equation
Camassa-Holm as geodesic equation
Are we done?
No! RHS must be smooth as function of \( \varphi,\dot\varphi\) but \(v=\dot\varphi\circ\varphi^{-1}\)
Second piece of magic
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Second piece of magic
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Proof:
Second piece of magic
Geodesic equation, again
Lemma: Mapping \(T\operatorname{Diff}^s(S^1)\to T^{s-1}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto (\partial_x(\dot\varphi\circ\varphi^{-1}))\circ\varphi \] is smooth
Thm: Spray \(T\operatorname{Diff}^s(S^1)\to T^{s-2}\operatorname{Diff}^s(S^1)\) given by \[(\varphi,\dot\varphi)\mapsto \tilde A^{-1}_\varphi (\tilde B_\varphi(\dot\varphi,\dot\varphi)) \] is smooth
That's it!
Another case: symplectomorphisms
\((M,\Omega)\) symplectic
\(v=X_\psi\) for Hamiltonian \(\psi\)
Change of coordinates: \( \psi \leftrightarrow X_\psi\)
| Lie bracket | ||
| Kinetic energy |
\(L^2\)
\(H^{-1}\)
?
?
E-A equation for \(\mathfrak{g} = C^\infty(M)\)

level-sets of \(\omega\)
Restriction to smooth dual: \(C^\infty(M)\subset\mathfrak{g}^*\) via \(L^2\) pairing
Casimir functions: \( \mathcal C_f(\omega) = \int_{S^2}f(\omega)\)
Finite-dim (weak) orbits: \(\omega = \sum_{k=1}^N \Gamma_k \delta_{x_k} \)
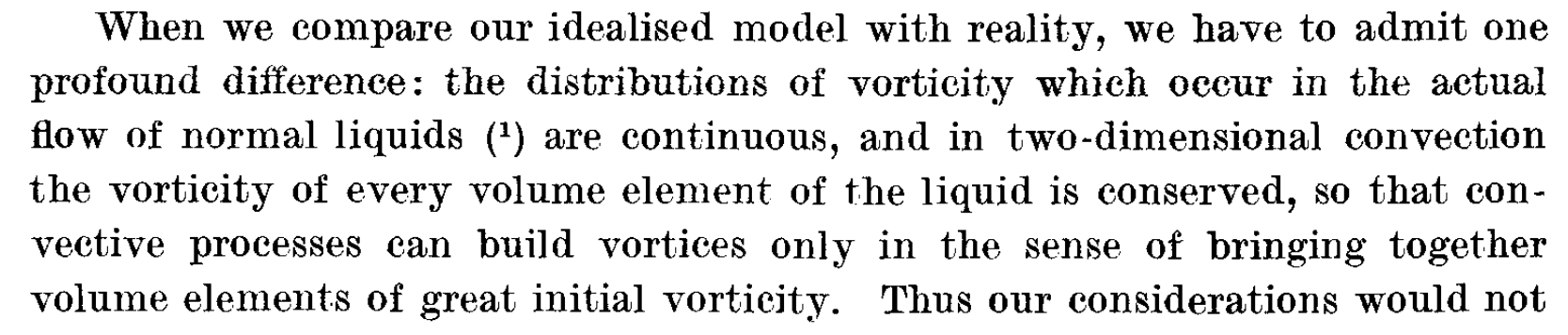
Comparison
- volume-preserving flow
- transport of vorticity 2-form \(\beta = dv^\flat\)
- Casimirs:
only helicity (in 3-D)
- symplectic flow
- transport of vorticity function \(\omega = \operatorname{curl}v\)
- Casimirs:
infinitely many
Consequence: 2-D Euler richer geometric structure than 3-D
- global existence
- inverse energy cascade
- vortex condensation
Yudovich's existence result
Yudovich formulation:
Vorticity formulation:
Yudovich is weaker: \(\omega_0 \in L^\infty\) enough
Fixed-point iteration over \(v,\Phi,\omega\):
\(L^\infty\) global existence
Generic long-time behavior?
Statistical mechanics
for 2-D Euler
Idea by Onsager (1949):
- Approximate \(\omega\) by PV for large \(N\)
- Find invariant measure and presume ergodicity
Hamiltonian function:

Statistical mechanics
for 2-D Euler
Idea by Onsager (1949):
- Approximate \(\omega\) by PV for large \(N\)
- Find invariant measure and presume ergodicity
Hamiltonian function:
Onsager's observation:
Pos. and neg. strengths \(\Rightarrow\) energy takes values \(-\infty\) to \(\infty\)
Statistical mechanics
for 2-D Euler
Idea by Onsager (1949):
- Approximate \(\omega\) by PV for large \(N\)
- Find invariant measure and presume ergodicity
Hamiltonian function:
Onsager's observation:
Pos. and neg. strengths \(\Rightarrow\) energy takes values \(-\infty\) to \(\infty\)
\(\Rightarrow\) phase volume function \(\mathrm{vol}(E)\) has inflection point
Statistical mechanics
for 2-D Euler
Idea by Onsager (1949):
- Approximate \(\omega\) by PV for large \(N\)
- Find invariant measure and presume ergodicity
Hamiltonian function:
Problems with Onsager's theory
- PV solutions far from smooth (\(H^{-1}\) but never \(L^p\))
- \(\Rightarrow\) No Casimir functions
- But experiments and numerical simulations strongly indicate that Casimirs affect long-time behavior
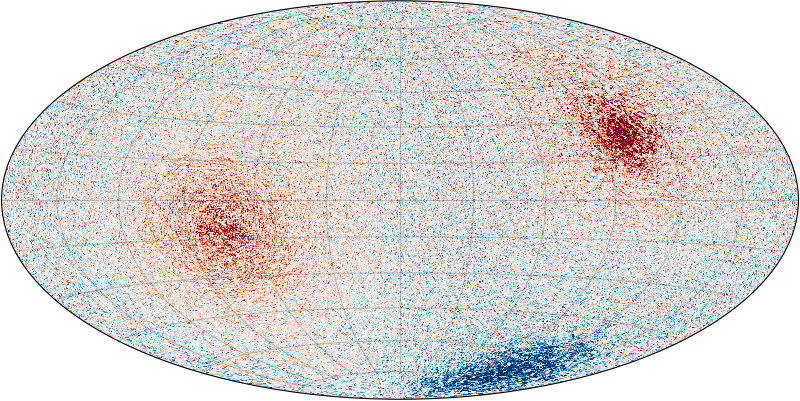
Numerical experiments contradict statistical theories
Numerical experiments contradict statistical theories
Alignment with
point-vortex dynamics
Mechanism for long-time behaviour
Observation: large scale motion quasiperiodic
Assumptions for new mechanism:
- Small formations merge to larger (inverse energy cascade)
- Well-separated blobs interact approximately by PVD
- Dynamics is not integrable \(\Rightarrow\) blobs continue to merge
- \(k\)-PVD integrable \(\Rightarrow\) quasi-periodicity prevents further mixing
Jewel of 2-D turbulence
For "generic" \(\omega_0\), what is the typical long-time behaviour?
More precise (Shnirelman 1993):
What is contained in \(\Omega_+(\omega_0)\) ?
Related (Sverak 2011): generic trajectories
are not \(L^2\) precompact ( \(\simeq\) enstrophy cascade )
Structure preserving discretization via quantization

Vladimir Zeitlin
Classical
Quantized
Discrete Laplace-Beltrami on \(\mathfrak{su}(N)\)
- Hoppe & Yau, 1998
\[\Delta_N W =\frac{N^2-1}{2}\sum_{i=1}^3[X_i^N,[X_i^N,W]]\]
What is \(\Delta_N\) and how to compute \(\Delta_N^{-1}W\) ?
- \(\Delta_N\) admits sparse \(LU\)-factorization
Spatial discretization obtained!
Note: corresponds to
\(N^2\) spherical harmonics
\(O(N^2)\) operations
\(O(N^3)\) operations
Isospectral flow \(\Rightarrow\) discrete Casimirs