presented by Matias Guijarro - BLISS team
Beamline Control Unit, Software Group
BLISS workshop DESY, 21/11/2023
Introduction to the
control system




ESRF Extremely Brilliant Source (EBS) update program
4th generation light source
150 M€ investment (2015-2022)
100x better
X-ray beams
New
state-of-the-art
beamlines
Data as a Service strategy
BLISS project goals


State-of-the-art beamline control
Advanced scans, Trajectories,
Data management
Integrated environment
Configuration, Command Line Interface, Live Data Display
Ready for new challenges
Online data analysis, live feedback, extensibility of the system
December, 2015
BLISS project starts
May, 2018
First tests with friendly users
October, 2017
1st talk about BLISS @ ICALEPCS '17 (Barcelona)


ESRF Upgrade shutdown period
BLISS team in September 2019

December, 2018
ESRF EBS shutdown
August, 2020
Restart of ESRF user operation
August 2023
BLISS 1.0
Deployment on EBS beamlines
... continuing BLISS deployment on all beamlines ...

March 2020
COVID lockdown
BLISS 1.11
December, 2020
February, 2020
1st publication with BLISS data
(hal-02466436)

BLISS project timeline


Data portal: https://data.esrf.fr
E-logbook


Live data visualization

Online data analysis workflows

Graphical user interface for data acquisition
Faster detectors, data production

Efficient data format, storage
Today's experiment control system challenges


Experiment scripts, user sequences


Jungfrau @ ID29

EWOKS
BLISS philosophy
Python library shipped with tools
Command Line Interface, web terminal
Configuration application
Live visualization
Data service & file writer
At the heart of the ESRF software ecosystem
Implementation of Data Policy
Graphical Interfaces
Online Data Analysis
Holistic approach to run synchrotron experiments

Sequencer for any kind of acquisition procedures
hardware control
or via built-in drivers
BLISS architecture and ecosystem

scalar
Aspects of BLISS
1. Beacon server
2. Shell
3. Data Management
4. Graphical Interfaces
5. Integration of hardware devices
6. Scanning engine
7. Data publishing
8. Live visualization
9. Data saving
10. Data processing
Beacon server
1

Beacon server: configuration and services




Transient data store
Settings cache

1
BLISS shell
2


BLISS command line interface
bliss -s <session_name>User sessions group beamline devices for an experiment + a Python setup file

2
based on ptpython: completion, typing helper, function parameter hints, syntax highlighting...


tmux is a terminal multiplexer used to run multiple terminals within the same window - multiple people can join the same BLISS session
BLISS web terminal
ptpython
interpreter
blissterm server
ptpython
interpreter

API
blissterm application
socket io
xtermjs

Daiquiri UI components library
logic


blissdata
2
Data management
3

Data management
3
Users can feed the ESRF Data Portal directly from the BLISS command line

Proposal
Datasets
Metadata
- acquisition parameters
- sample parameters
Gallery
- images, plots, associated to a dataset
Tape interface
newcollection("sample1")Data management: electronic logbook
3
IH-LS-3167: elemental distributions in microalgae


BLISS commands to submit comments, plots, execution output, logs
elog_add("...")
Automatic notifications
Manually editable from the Data Portal
searchable
Graphical interfaces

Introducing Daiquiri
1. White Rum
2. Lima juice
3. Fine sugar
4. a drop of
4
Daiquiri
A web-based User Interface framework, designed to build data acquisition and beamline control applications
4
Daiquiri architecture
4
BLISS


daiquiri-local
Daiquiri example: integrated user interfaces
4


Daiquiri example: parameterisation
4

4

Daiquiri example: monitoring
Integration of hardware devices
5

Integration of hardware devices
BLISS provides communication helpers to implement protocols more easily, and mini-frameworks for each category of devices
5
abstraction level
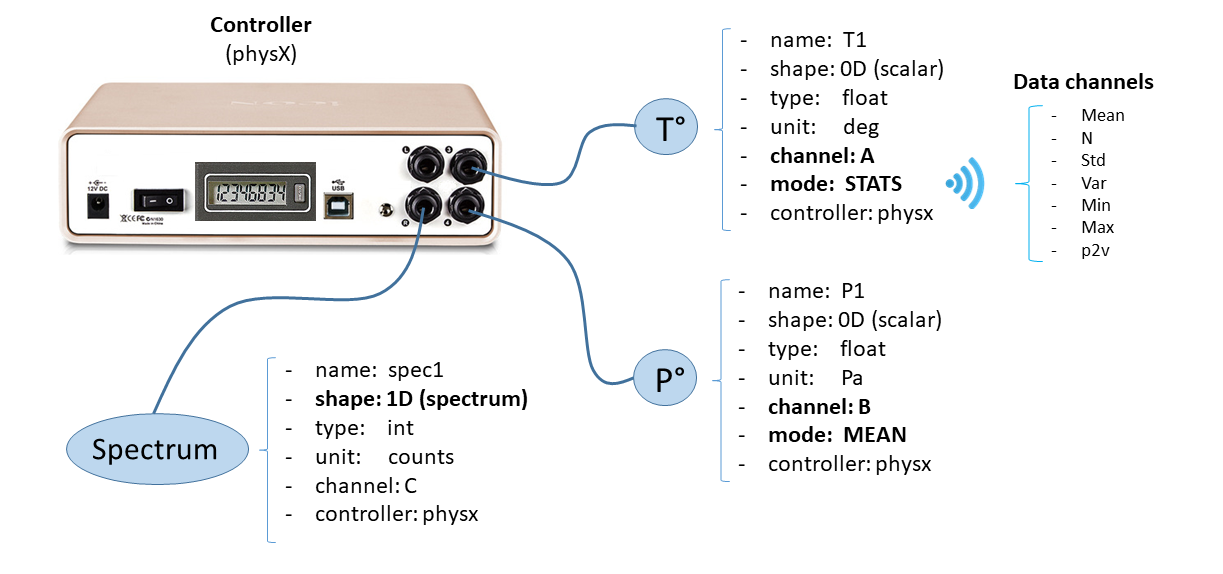
Generic controllers like "attribute as Counter" makes integration of TANGO devices without coding anything
scalar
"Counters" for scans
- class: tango_attr_as_counter
uri: id00/undulator_dev/u35c
counters:
- name: u35c_pos
attr_name: position
mode: MEAN
unit: mmsynchronization
low latency
flexibility
BLISS scans
6
Beacon static configuration service
BLISS scan engine
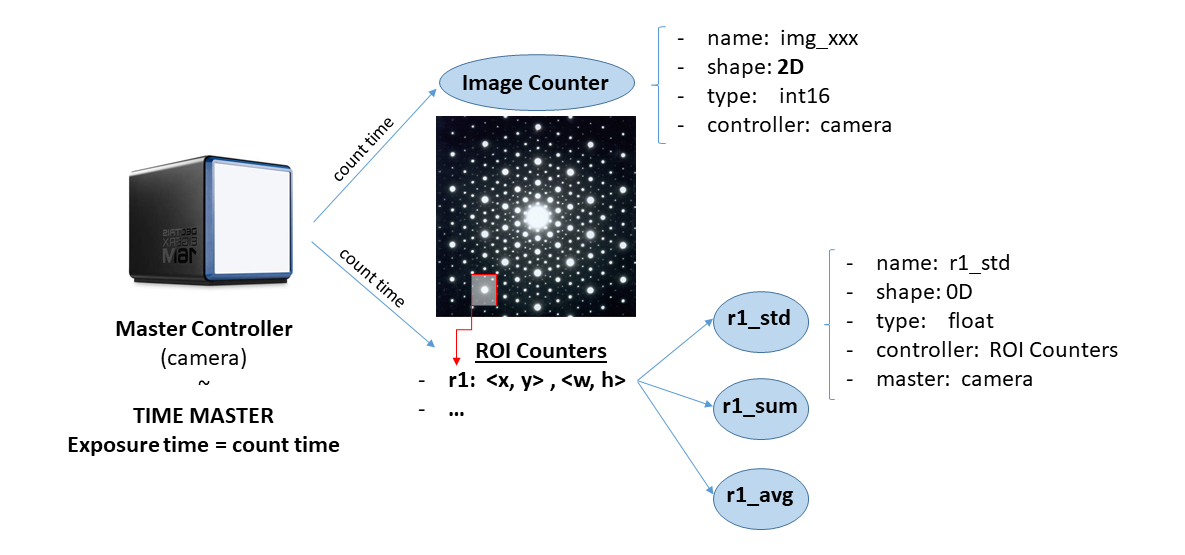
All scans in BLISS are based on the same Scan object
The Scan object iterates through the Acquisition Chain
The Acquisition Chain is a tree structure, with Acquisition Masters as nodes and Acquisition Slaves as leaves
The chain describes what triggers what (software or hardware triggering)
Both Acquisition Masters and Slaves can read data ;
data is sent to Redis via Acquisition Channels
6
Beacon static configuration service
Scan counters
The name "counter" comes from SPEC - in BLISS it represents a placeholder for the data to be recorded, that users have to put in scans
Sampling counters example
Integrating counters example
6
Beacon static configuration service
Scan measurement groups
A Measurement Group is a Python object containing Counters
Allow user to enable/disable counters
There is 1 global Measurement Group per BLISS session
(indicates "default" counters == what to count when a scan is launched without counter argument)
DEMO [1]: align_counters
Out [1]: MeasurementGroup: align_counters (state='default')
- Existing states : 'default'
Enabled Disabled
------------------------------- --------------------
sim_diode_sampling_ctrl:diode
sim_diode_sampling_ctrl:diode2
sim_diode_sampling_ctrl:diode3- class: MeasurementGroup
plugin: session
name: align_counters
counters: [diode, diode2, diode3]
6
Beacon static configuration service
BLISS standard scans
Step-by-step scans, not requiring any special hardware

ct
single count
loopscan
repeated counts

timescan
infinite counts

ascan
move a single motor, N steps

a2scan
moves 2 motors, N steps

amesh
moves 2 motors, N*M steps

pointscan
moves given motors, list of coordinates, N steps
Note: for standard scans, the acquisition chain is built automatically, trying to guess the more optimized settings
The "default chain" can be customized to tell to use a counting card instead of a software timer as a master to trigger a 2D detector (for example)
6
Beacon static configuration service
Common parameters for standard scans
scan_command(..., *counters, #optional list of counters, or mix of counters+MG name="scan", title=None, #default (None): scan cmd+arguments separated by space save=True, save_images=None, #default (None): follows the "save" argument sleep_time=0 #float, sleep time after counting (between 2 points) stab_time=0 #float, stabilization time after a move, before counting run=True, return_scan=True)
6
Software continuous scan example
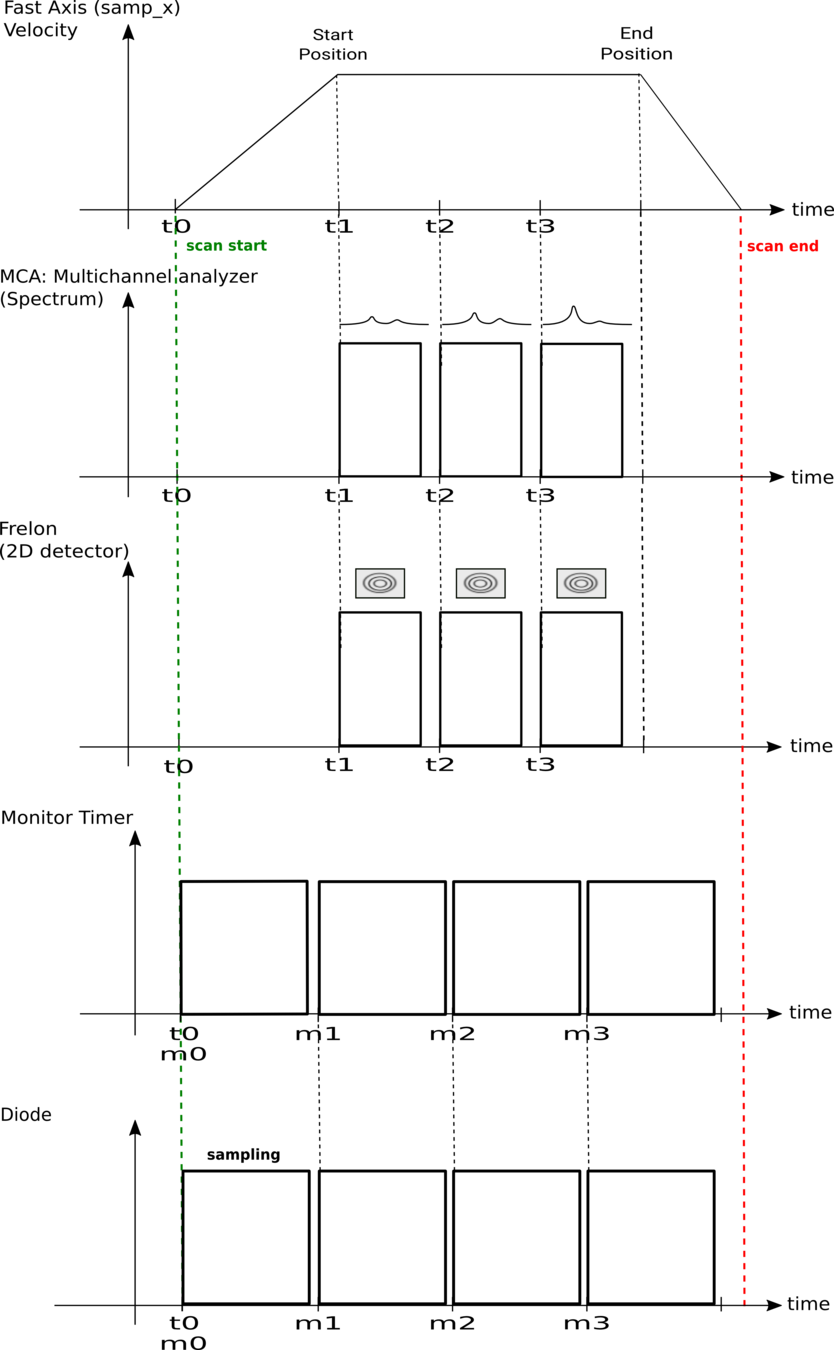

Continuous scan with a motor triggering MCA and 2D detector acquisition, while a timer triggers diode readings

6
Data publishing
7

Data publishing
7

BLISS relies on blissdata to publish acquisition data to Redis
For big 2D data, only references are published
blissdata is a separate package, it can be used to read data (incl. during acquisition)


Daiquiri
web GUI


BLISS data flow
7
Live visualization
8

Live visualization
8
Flint is a PyQt graphical application shipped with BLISS
It is based on the ESRF silx toolkit
It relies on blissdata to display live data from BLISS acquisition
Interactive control of Flint
8
Flint can be remote controlled from BLISS scripts, thanks to dedicated Python functions
This allows to create interactive experiment sequences with no PyQt code to write
TOMO_SESSION [1]: edit_roi_counters(tomocam, 1.0)
WARNING 2020-10-16 15:39:45,049 flint: Flint starting...
Waiting for ROI edition to finish on tomocam [default, default]...
WARNING 2020-10-16 15:39:46,999 flint: Waiting for selection in Flint window.

Data saving
9

Data saving
9
The BLISS Nexus Writer is a TANGO server that uses blissdata to listen to scans and to save them in a
Nexus-compliant HDF5 file


Data processing
10

Data processing
10

Processing data is hard and takes time !
What processing do I need to do?
Where is my data ?
What software do I need to install? And how ?
There is too much data!
I will never be able to process it all !
Oh god, I forgot to apply the mask !
The software is not working and the PhD/post-doc who wrote it left !
Data processing
10
Problem: how to improve data processing experience, and how to apply processing as soon as possible?
- To make informed decisions during acquisition
- To provide to users to help/encourage further data analysis


i.e, to go from this...
to this:
Data processing: workflows
10
Ewoks (Esrf WorKflowS) to the rescue
Workflows are data processing pipelines composed of several steps (tasks)
Acquisition control

Execute ewoks workflow on
- local machines (immediate feed)
- slurm nodes
Tasks can be rearranged or reused in other workflows without deep knowledge of the task content
Upload result to data portal
Persist result for further analysis
Visualization, feedback
EWOKS example: Exafs visualization
10

Raw parameter space

Workflow based on xraylarch
Parameter space in which scientific decisions are made

Last but not least...
Selected features praised by ESRF scientists
1. Python!
2. Software axes and counters
3. Software regulation loops
Python!
Example from BM23 (Kirill Lomachenko): beamline "health check" for local contacts via Telegram, thanks to Telegram Python API

Scientists can take advantage of the huge Python ecosystem in their own scripts
1.1
Python!
from bliss.setup_globals import fsh, diffrz
import numpy as np
def ftomo_series(scanname, start, num_scans, sleep_time=0, pars=None):
for i in np.arange(start, start+num_scans):
newdataset(f"{scanname}{i}")
umv(diffrz, pars['start_pos'])
with fsh.closed_context():
print("taking dark images")
ftimescan(pars['exp_time'], pars['nref'], 0)
if i==start or not(i%pars['ref_int']):
print("taking flat images")
ref_scan(pars['ref_mot'], pars['exp_time'], pars['nref'], pars['ref_step'], pars['start_pos'], pars['scan_mode'])
else:
print("skipping flat images - stay where we are")
ftimescan(pars['exp_time'], 10,0)
print("taking projections...")
fscan(diffrz, pars['start_pos'], pars['step_size'], pars['num_proj'], pars['exp_time'], scan_mode = pars['scan_mode'])
print("resetting diffrz to 0")
umv(diffrz, pars['start_pos']+360)
diffrz.position=pars['start_pos']
sleep(sleep_time) 
Example from ID11: tomography @ nanofocus endstation

25 degrees/s.
diffrz
500 fps
700 GB per hour of (compressed) data
User-written acquisition sequence == night shift macro
continuous, hardware-synchronized scans
direct import of beamline objects from BLISS setup in user scripts
nice Python features: context manager, to ensure fast shutter is closed
whole Python ecosystem can be available
Python functions, with named arguments and default values
1.2
Software pseudo axes
Example from BM32: Laue diffraction
Pseudo axis to switch from Energy (HKL reciprocal space)
to crystal angle (real hardware, rotation axis)

Energy to Bragg angle abacus
from bliss.controller.motor import CalcController
class EnergyCalc(CalcController):
def initialize(self):
"""Load abacus data, to be able to do the calculation"""
...
def calc_to_real(self, **positions):
"""Take pseudo axis position, and return real axis position"""
...
def calc_from_real(self, **positions):
"""Return calculated axis position from real axis position"""
...
- controller:
class: EnergyCalc
package: bm32.ctrls.pseudo_laue
axes:
- name: $thf
tags: real thf
- name: Edia
tags: Edia
unit: eV

file: ~/local/bm32/ctrls/pseudo_laue.py
2.1
Software pseudo counters
In BLISS, a counter is a Python object representing an experimental parameter which can be measured during a scan
A Software counter takes multiple counters as inputs and produces multiple calculated counters as outputs
Software counters can be created in code, or declared from the BLISS configuration:
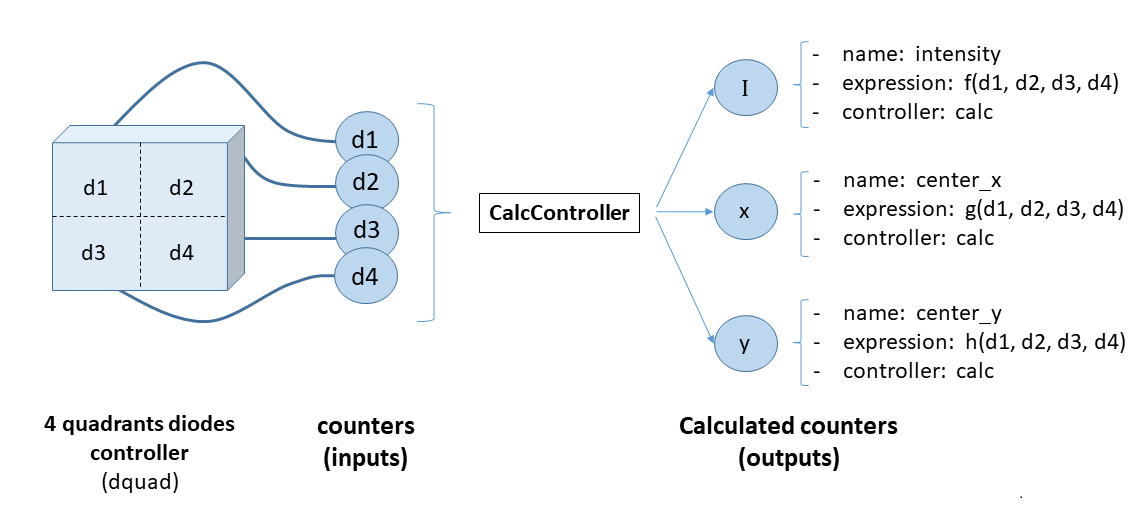
- class: ExpressionCalcCounterController
name: calc_diodes
inputs:
- counter: $diode1
tags: d1
- counter: $diode2
tags: d2
- counter: $diode3
tags: d3
- counter: $diode4
tags: d4
constants:
m : 0.5
n : 0.8
outputs:
- name: intensity
expression: (d1 + d2 + d3 + d4 )
- name: cen_x
expression: m*(d2-d1) + m*(d4-d3)
- name: cen_y
expression: m*(d3-d1) + m*(d4-d2)2.2
Software regulation loops
Example: beam position regulation
Compensation of low frequency drifts due to thermal load changes or mechanical instability

BLISS provides a Software Loop object, that knows how to regulate with PID parameters
Existing BLISS objects with "read" interface can be taken as Input, and objects with "set" interface can be taken as Output
3

DEMO
And now, ladies and gentlemen...
Thanks for your attention

Questions ?
Acknowledgements
BLISS Core Development team 2015-2023
T. Coutinho*, W. De Nolf (DAU), L. Felix, B. Formet* , P. Guillou, C. Guilloud,
M. Guijarro, V. Michel*, P. Pancino*, E. Papillon, L. Pithan*,
S. Petitdemange, V. Valls
Beamline Operation team
A. Beteva, G. Berruyer, L. Claustre, S. Debionne, S. Fisher, A. Homs, M-C. Lagier, A. Mauro, C. Muzelle, M. Oscarsson, D. Naudet, H. Witsch
head of Software Group: A. Gotz, head of BCU: J. Meyer

(*: left ESRF)



Data Automation Unit: M. Bodin, A. De Maria, L. Huder