Tractable Adaptability
Ethan K. Gordon
Postdoc, University of Pennsylvania
PhD 2023, University of Washington



Active Learning for Contact-Rich Assistive Manipulation
The Promise of Physical HRI
“For a long time, I would only let my mom feed me. I wondered, why am I so uncomfortable with others feeding me that I’ll just not eat? I realized that eating is so individualized, with so many intricacies. If I can have a robot do it, I can learn to adapt to it, but it would be me feeding me, and that would be huge”
Tyler Schrenk
1985-2023

What is needed for pHRI?
Contact-Rich Manipulation
- Sliding to clean the spoon and bowl
- Shaking to smoothen
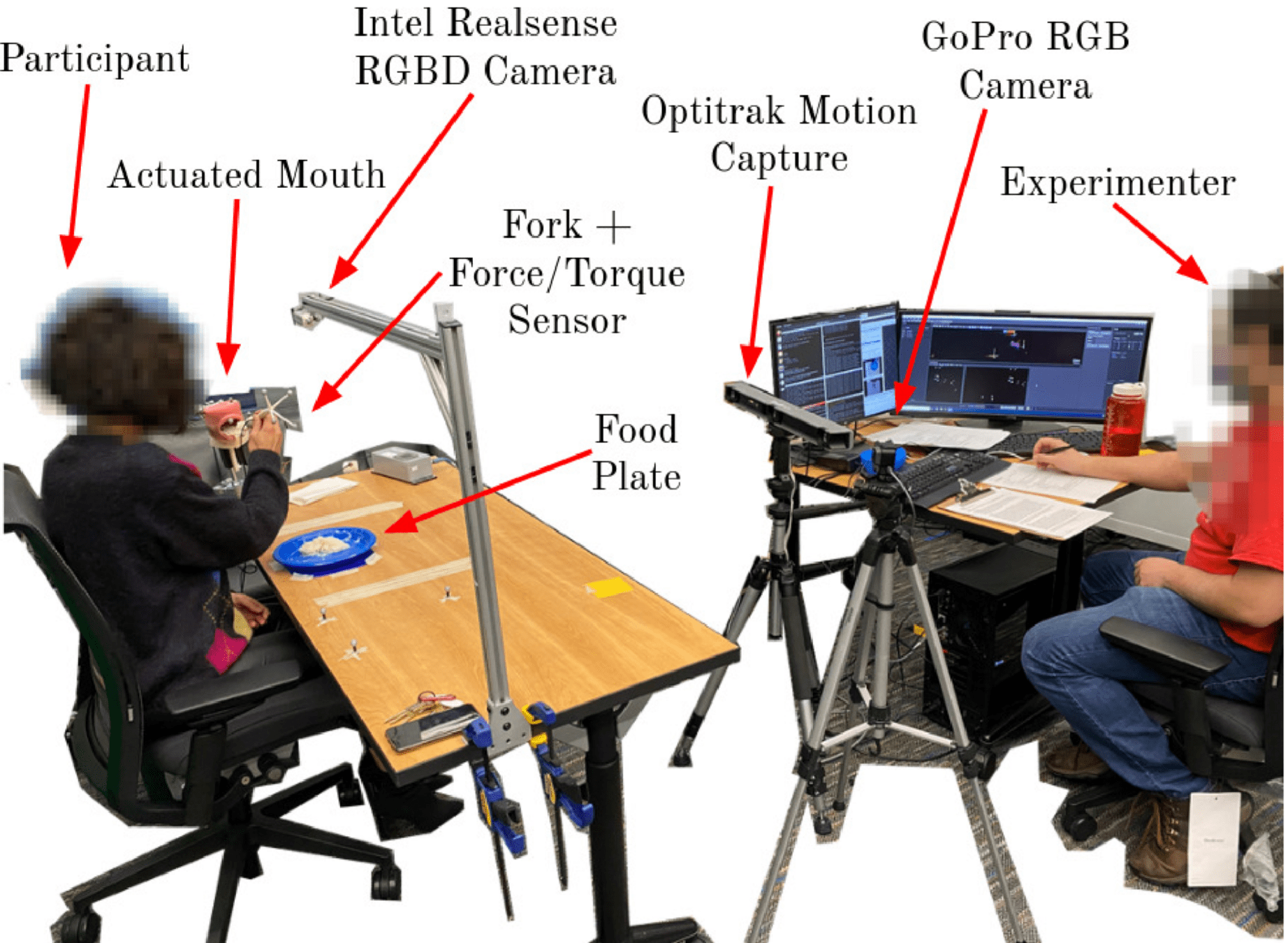
- In-Mouth Hand-Off
(vision-denied)
Online Adaptation
- Bite Size Adjustment
What is needed for pHRI?
Online Adaptation
- Totally Different Food
- Multi-bite: different shapes for each bite
There is no time for
re-training!
Tractable Adaptability
How can robots efficiently learn, during deployment, how to manipulate previously-unseen objects?
The Technology/Application Cycle
Support
Inform
(Gordon, Under Review)Active Learning in Contact
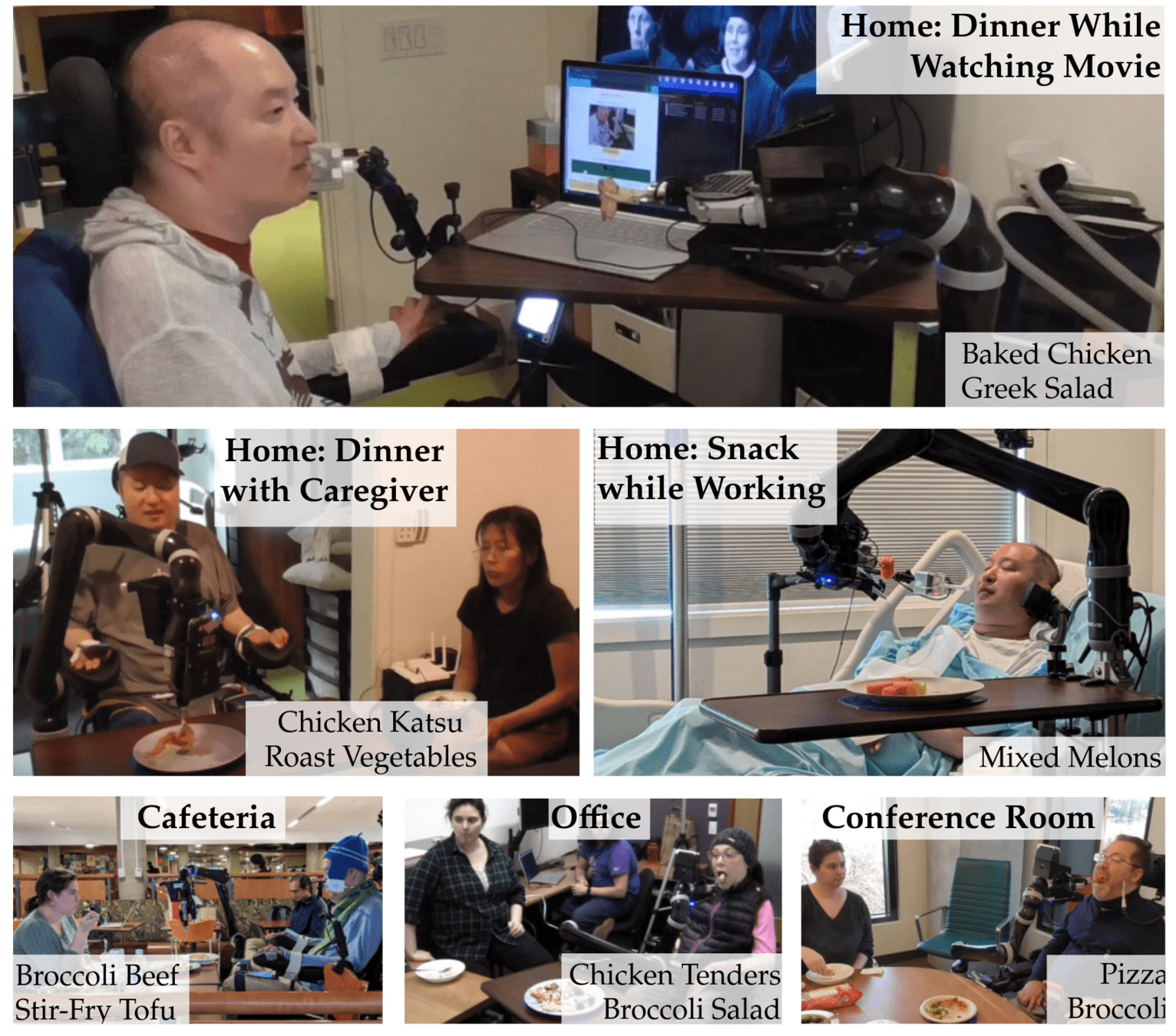
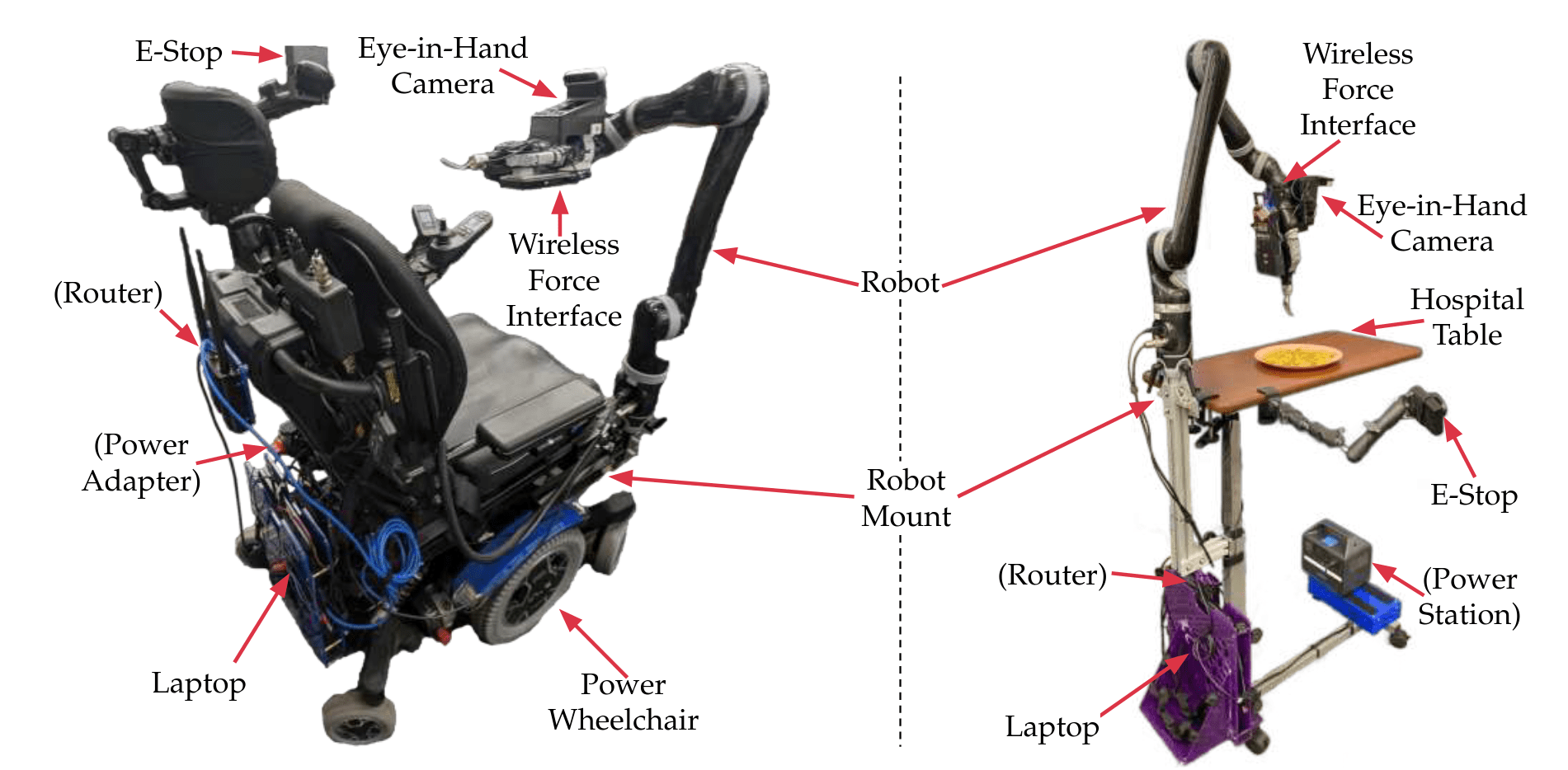
Assistive Robotics
(Gordon, CoRL 2023)(Feng, ISRR 2019)(Gordon, IROS 2020)(Gordon, ICRA 2021)(Nanavati, HRI 2025)(Bhattacharjee, HRI 2020)(Nanavati, HRI 2024)(Gordon, HRI Companion 2024)The Technology/Application Cycle
Support
Inform
Active Learning in Contact
Assistive Robotics
Policy Space Simplification
Leveraging Haptics
(Nanavati, HRI 2025)(Bhattacharjee, HRI 2020)(Nanavati, HRI 2024)(Gordon, HRI Companion 2024)Problem: Bite Acquisition
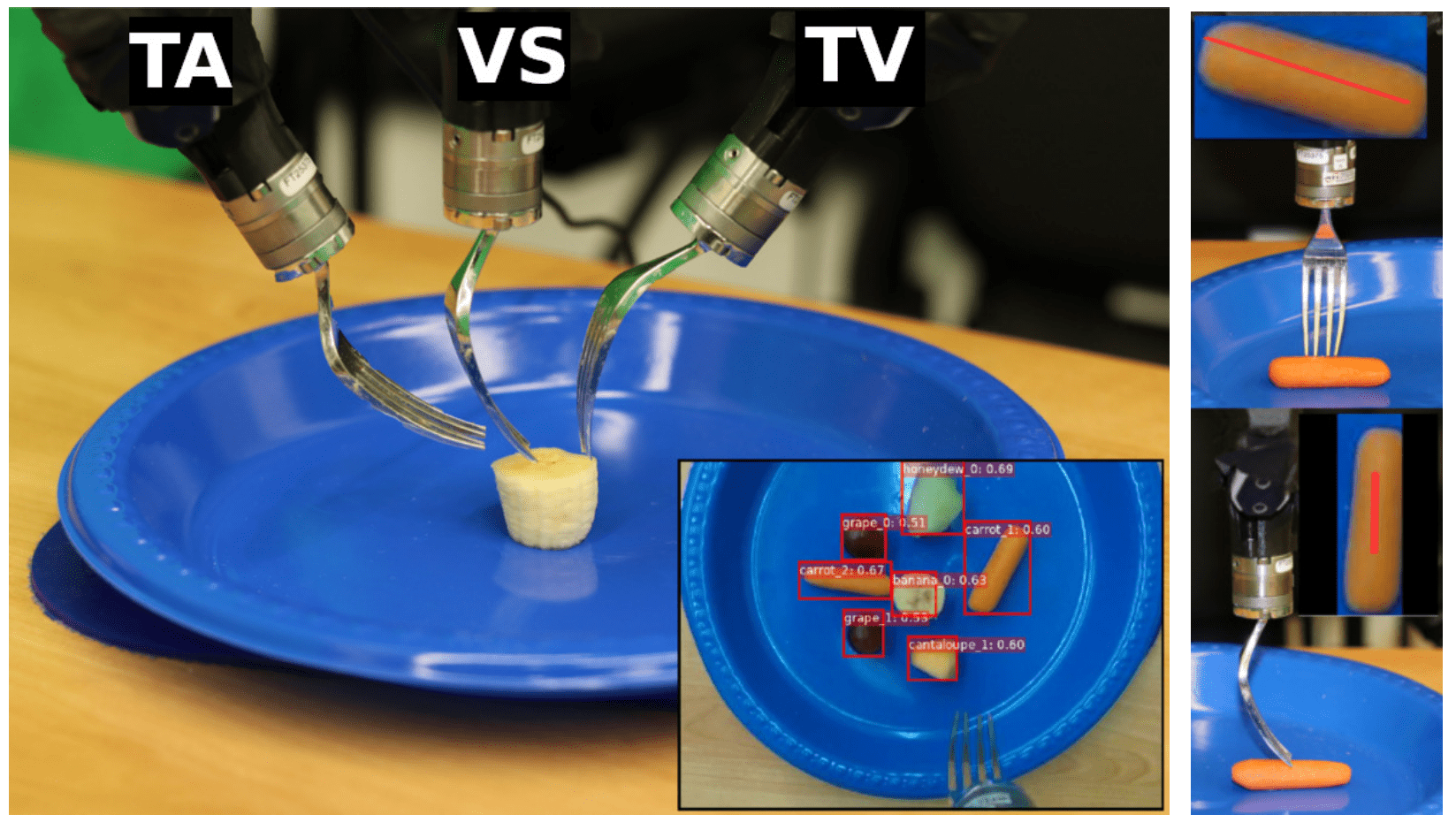
Online Bite Acquisition Challenges
- Large Action Space (whole trajectory) OR Sparse Reward
- Unknown Dynamics / State Transition: food simulation is hard!
Solution: Data-Driven Policy-Space Simplification
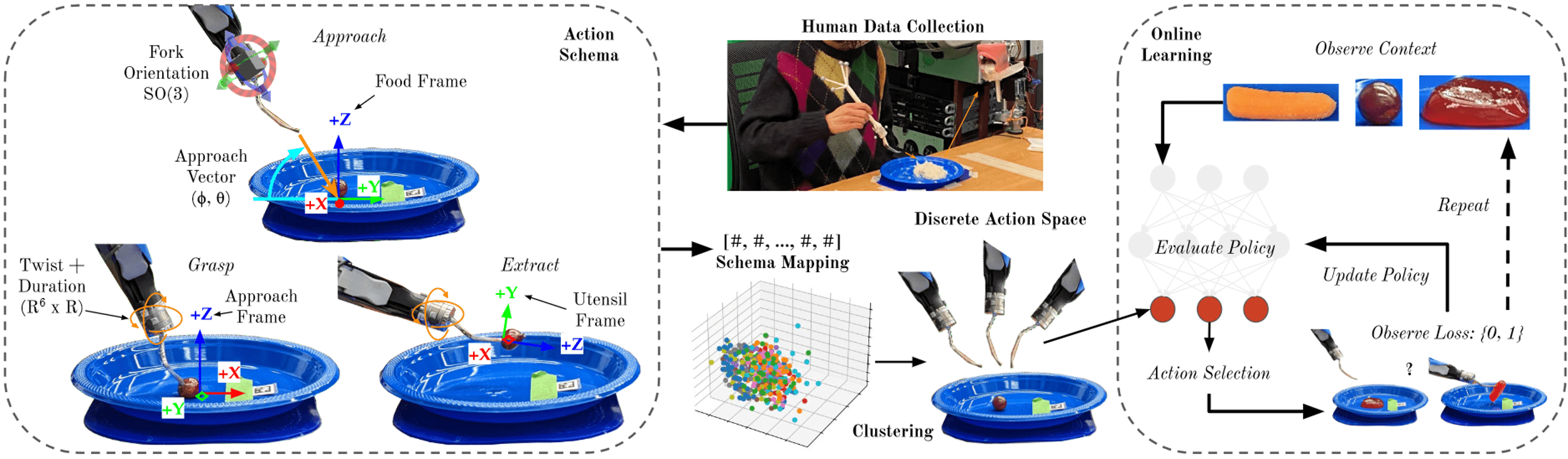
(Gordon, CoRL 2023)Learn This Online!
Data-Driven Discretization: Emergent Behavior
Wiggling
Tilting
High Pressure
Scooping
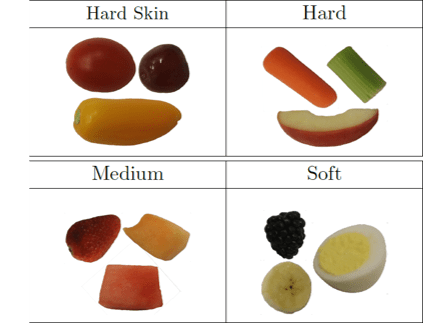
Online Bite Acquisition Challenges
- High-Dimension State Space: Foods are really diverse!
Solution: Haptic Policy Regularization
(Bhattacharjee, R-AL 2019); (Gordon, IROS 2020); (Gordon, ICRA 2021)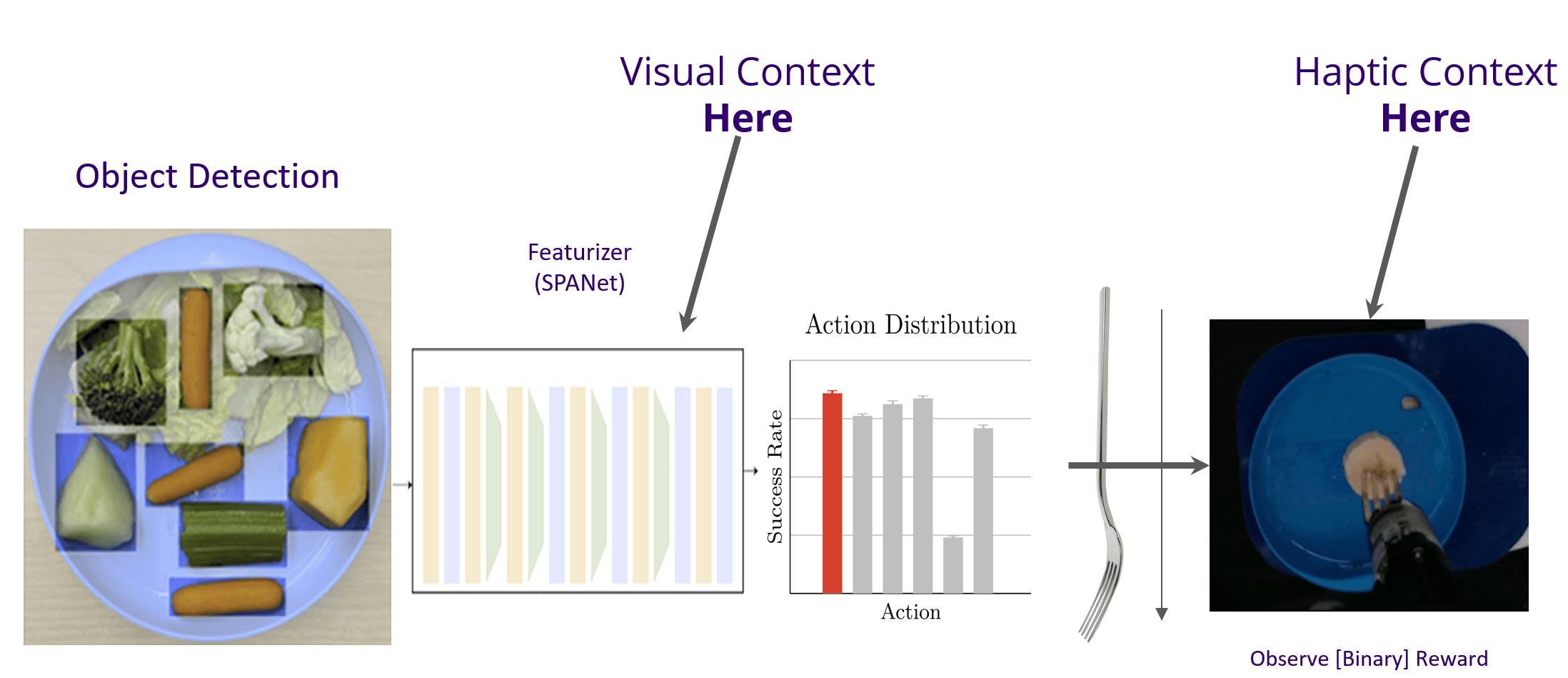
Optimize Jointly
The Technology/Application Cycle
Support
Inform
(Nanavati, HRI 2025)Active Learning in Contact
Assistive Robotics
(Bhattacharjee, HRI 2020)(Nanavati, HRI 2024)(Gordon, HRI Companion 2024)Modeling Information Gain
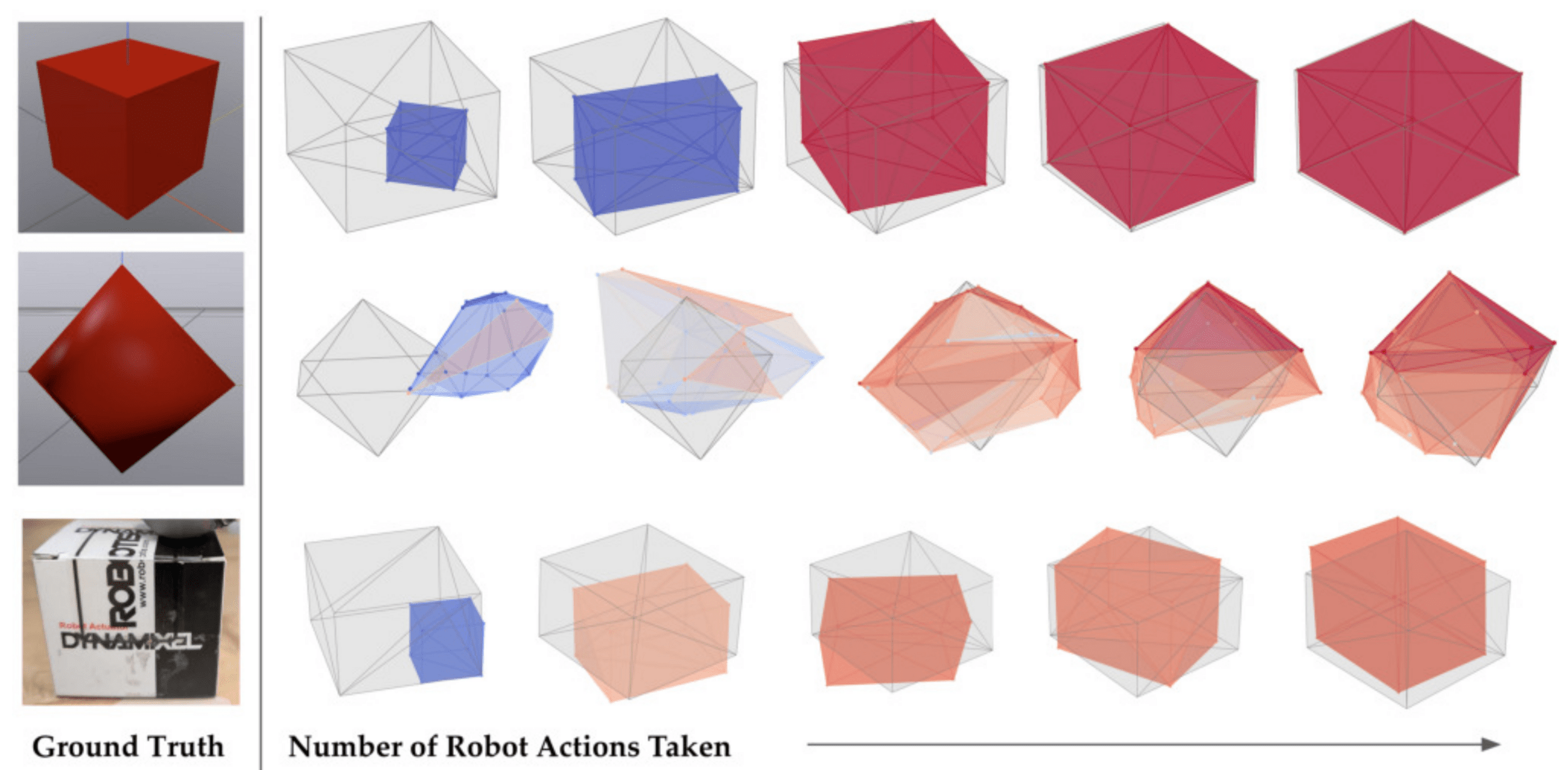
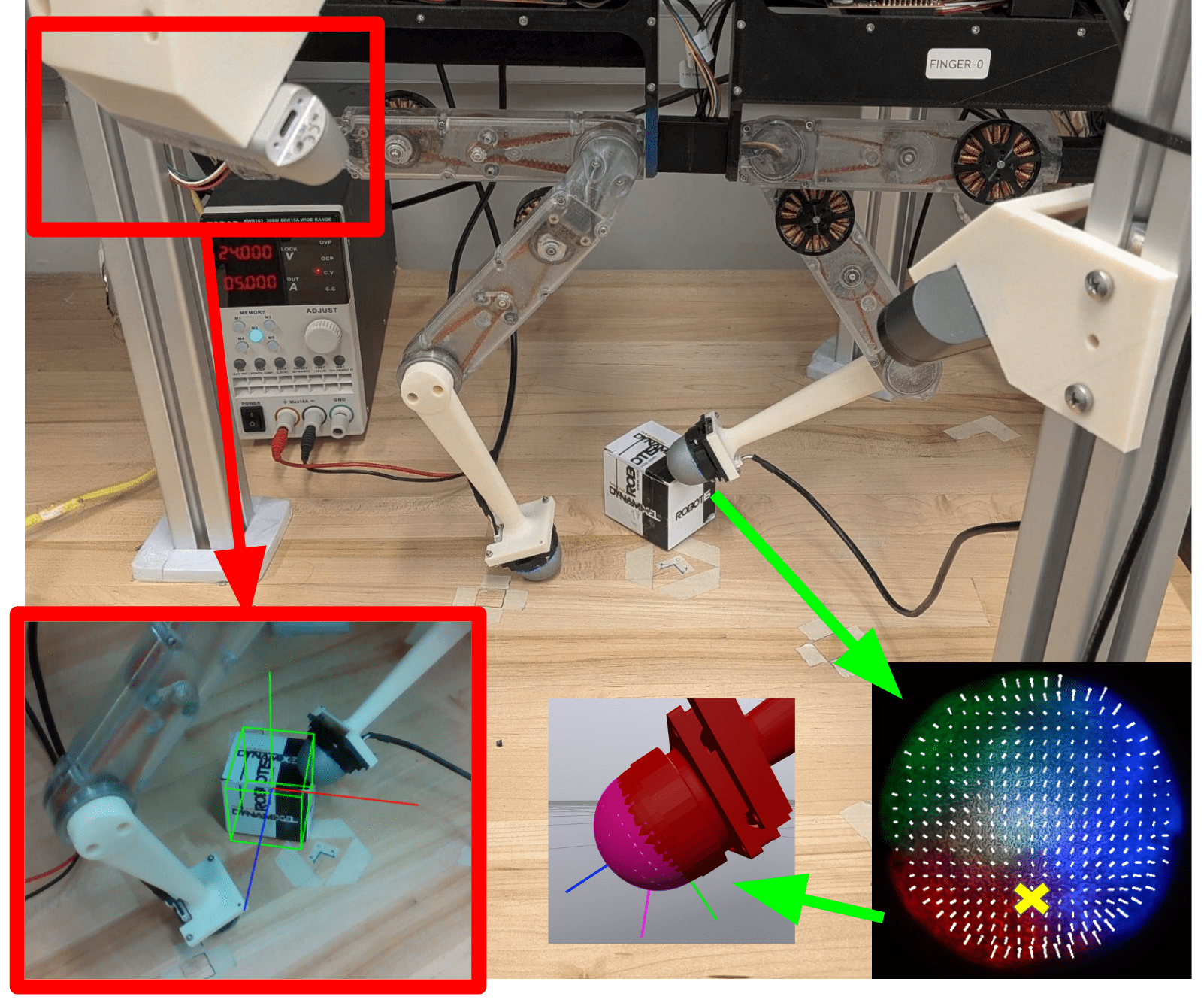
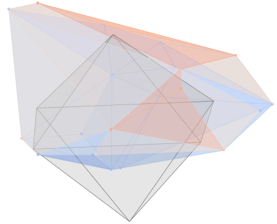
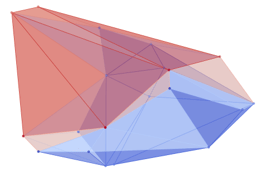
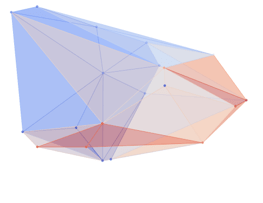
Tactile System Identification
Dynamic Object System Identification
Choose:
-
Robot Trajectory \(r[t]\)
Measure:
-
Contact Boolean \(c_t\)
-
Contact Normal \(\hat{n}_t\)
-
Proprioception
Find:
-
Object Geometry \(\theta^*\)
-
Object Pose \(x^*_T\)
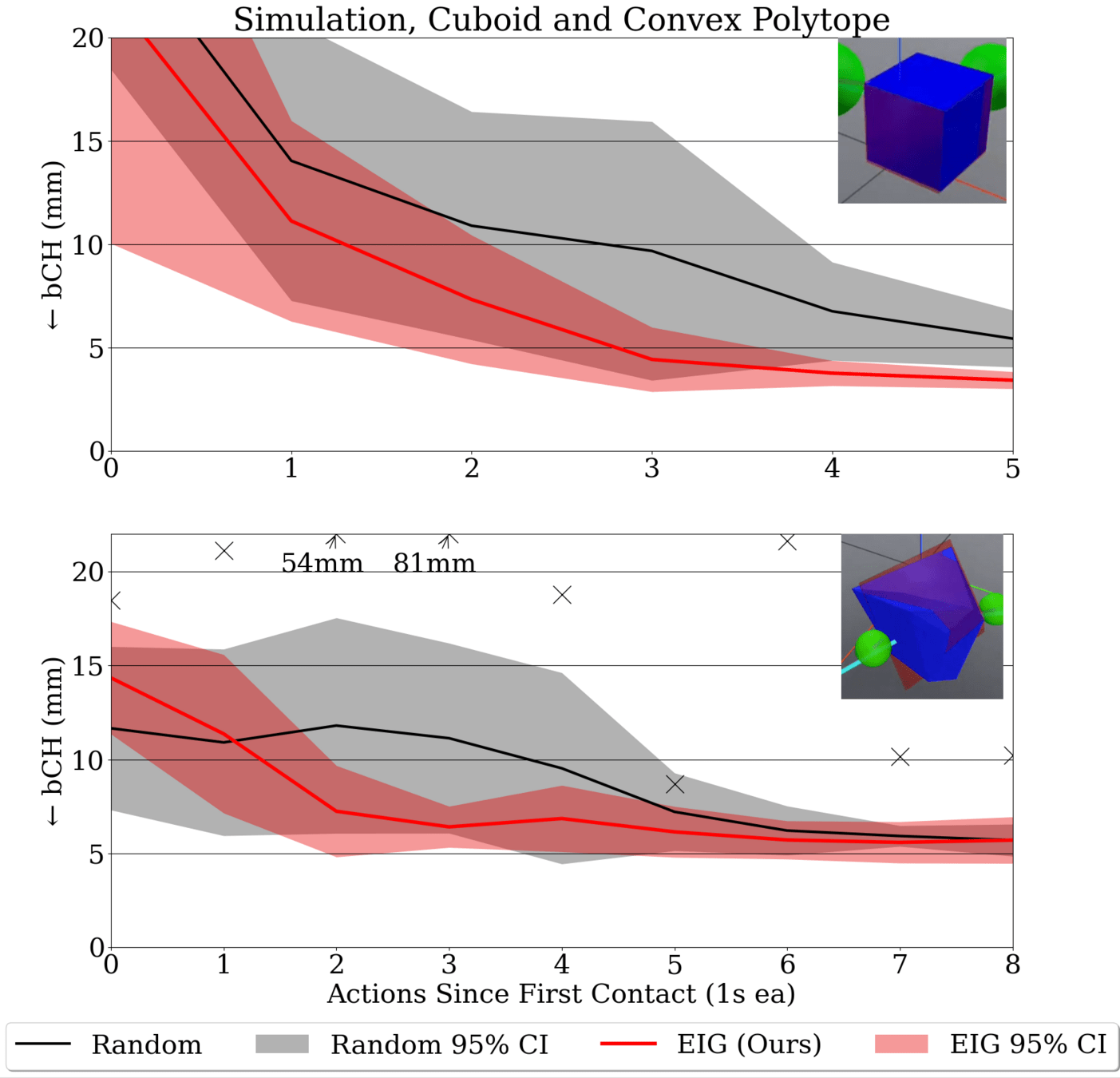
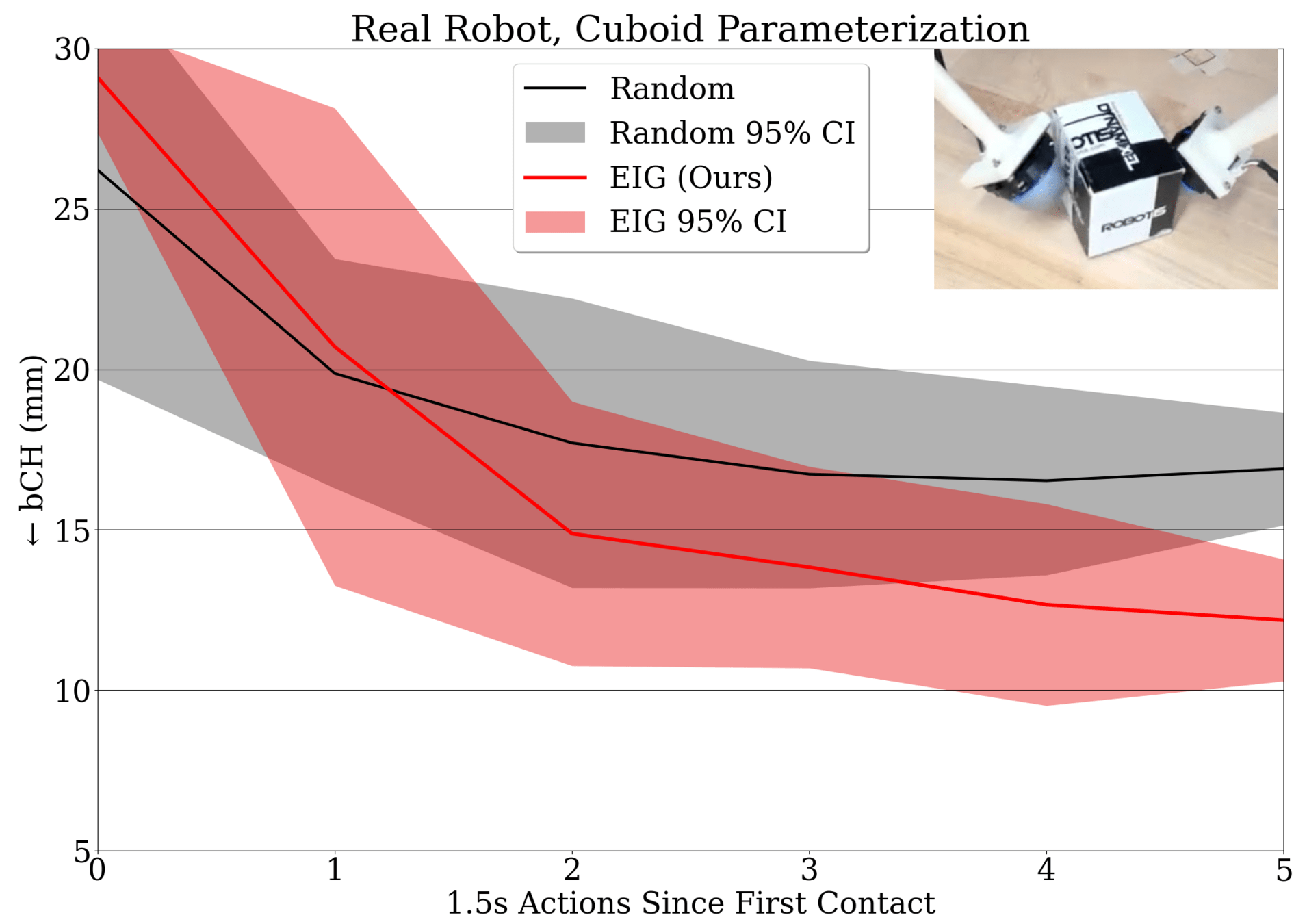
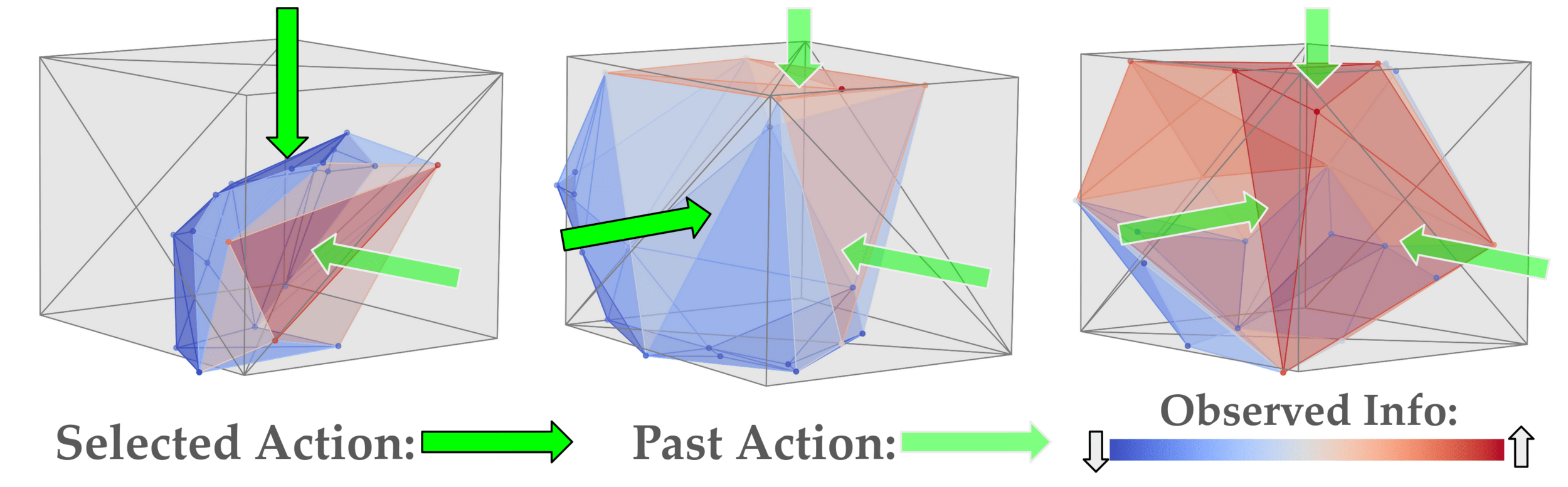
Exploration with Expected Information Gain (EIG)
Learn; Compute
Observed Info \(\mathcal{I}\)
Sample + Simulate
Expected Fisher Info \(\mathcal{F}\)
\(\max EIG := \log\det\left(\mathcal{F}\mathcal{I}^{-1} + \mathbf{I}\right)\)
Choose actions where simulated, expected Fisher info is distinct from Observed info.
Learning with a Violation-Implicit Loss
Information Maximization In Action
The Technology/Application Cycle
Support
Inform
Active Learning in Contact
Assistive Robotics
(Gordon, Under Review)(Gordon, CoRL 2023)(Feng, ISRR 2019)(Gordon, IROS 2020)(Gordon, ICRA 2021)User-Informed Metrics
Community-Based Design

User Studies Capture Metrics
(Bhattacharjee, HRI 2020)Trade-off between autonomy (with chance of error) and high-effort manual control.
What errors are tolerable?
User Studies Capture Diversity
Community-Based Participatory Design
(Gordon, HRI Companion 2024)Community-Based Participatory Design
(Nanavati, HRI 2025)The Technology/Application Cycle
Support
Inform
Active Learning in Contact
Assistive Robotics
The Technology/Application Cycle
Support
Inform
Active Learning in Contact
Assistive Robotics
Thank you!




DAIR Lab
Amal Nanavati



Tractable Adaptability
Ethan K. Gordon
Postdoc, University of Pennsylvania
PhD 2023, University of Washington
Active Learning for Contact-Rich Assistive Manipulation
Structure Through Expert-Defined Heuristics
- Qualitative Taxonomy of Single-Utensil Bite Acquisition
- Convert to Action Schema:
- \(\mathbb{R}^{14} \times SO(3) \times S^2\)
- Force and Torque Thresholds
Benefits: Interpretable, Continuity (Similar Numbers \(\rightarrow\) Similar Action)
(Gordon, CoRL 2023); (Bhattacharjee, R-AL 2019) 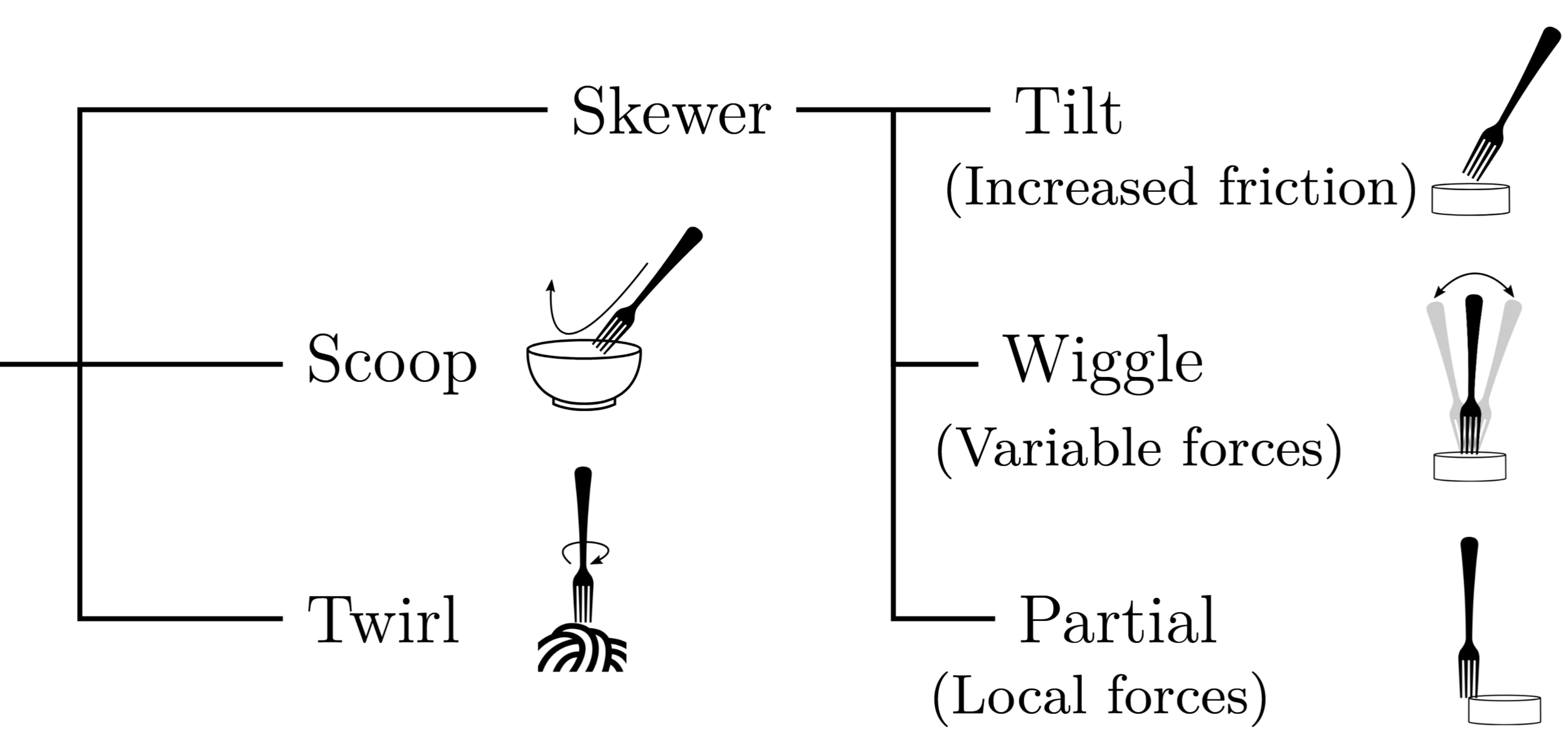
Data-Driven Discretization
(Gordon, CoRL 2023)Exploration vs. Exploitation: Contextual Bandits
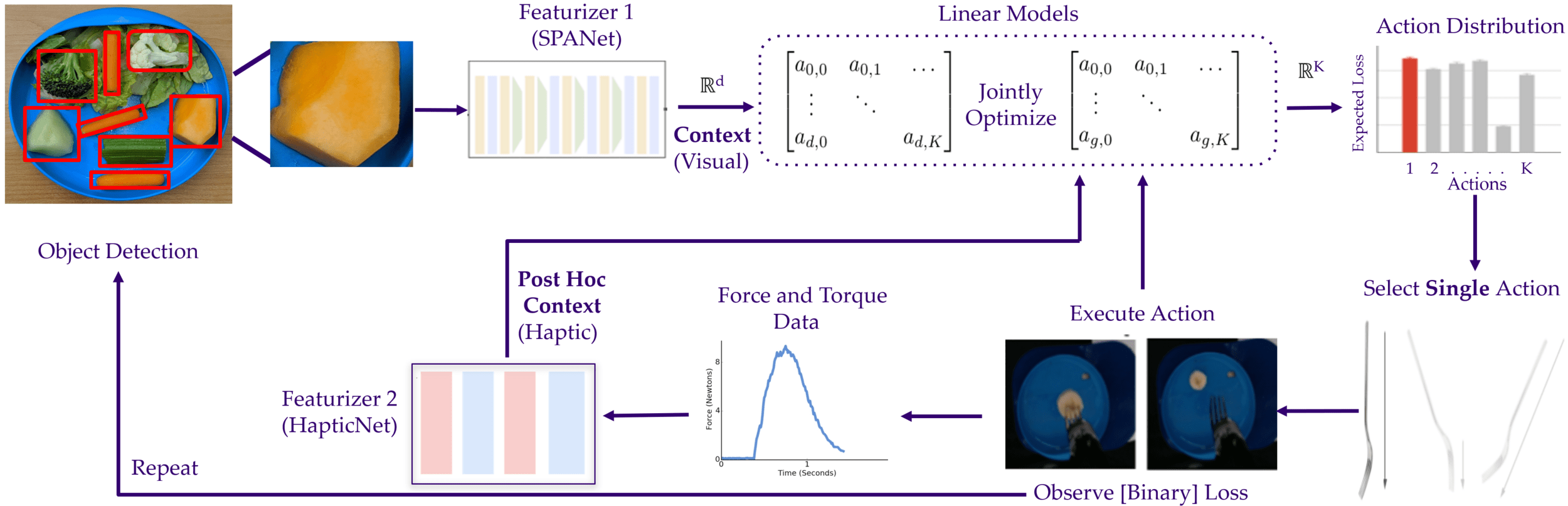
(Gordon, IROS 2020); SPANet from (Feng, IJRR 2019)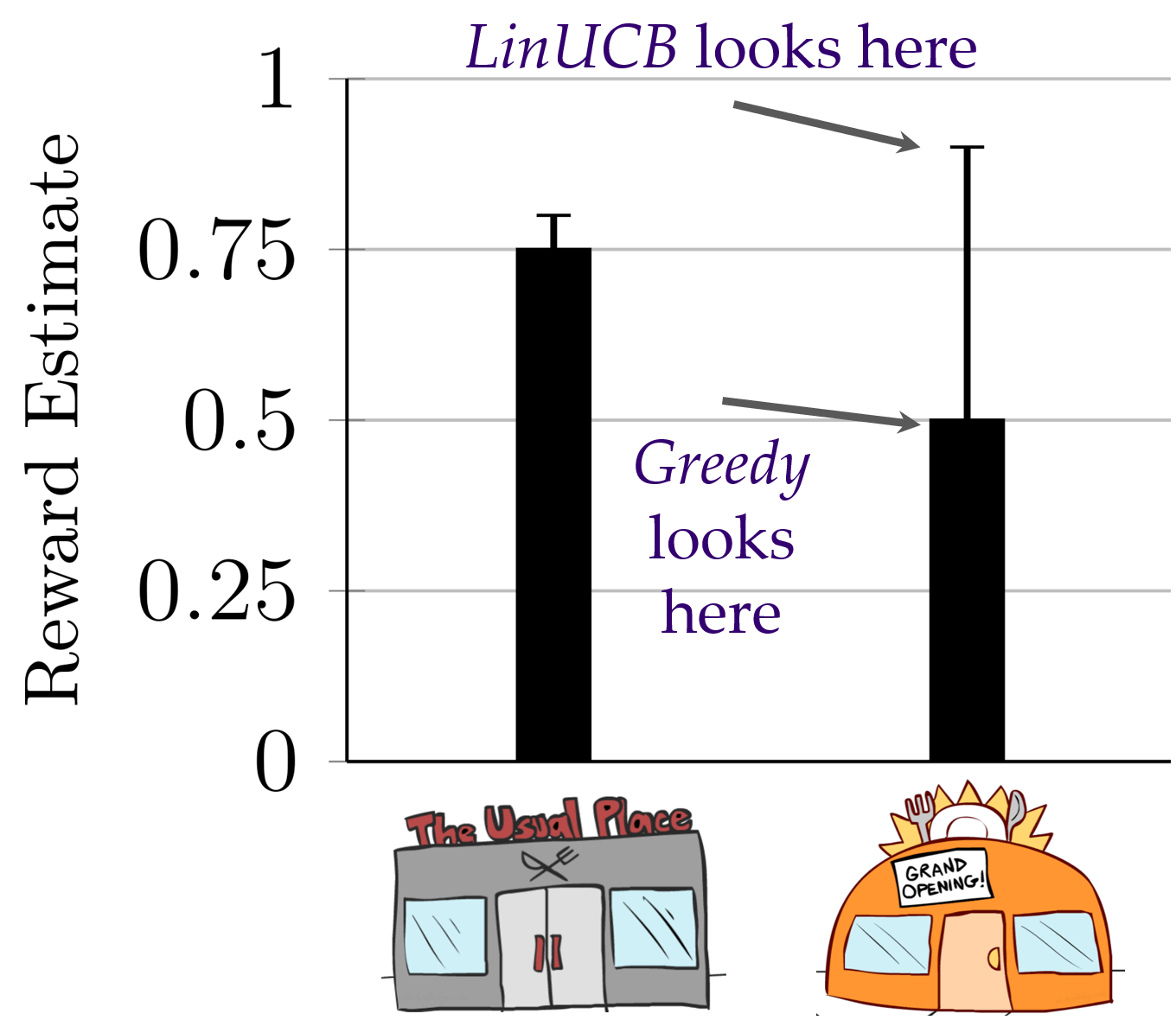
Incorporating Haptic Information
(Gordon, ICRA 2021); (Bhattacharjee, R-AL 2019)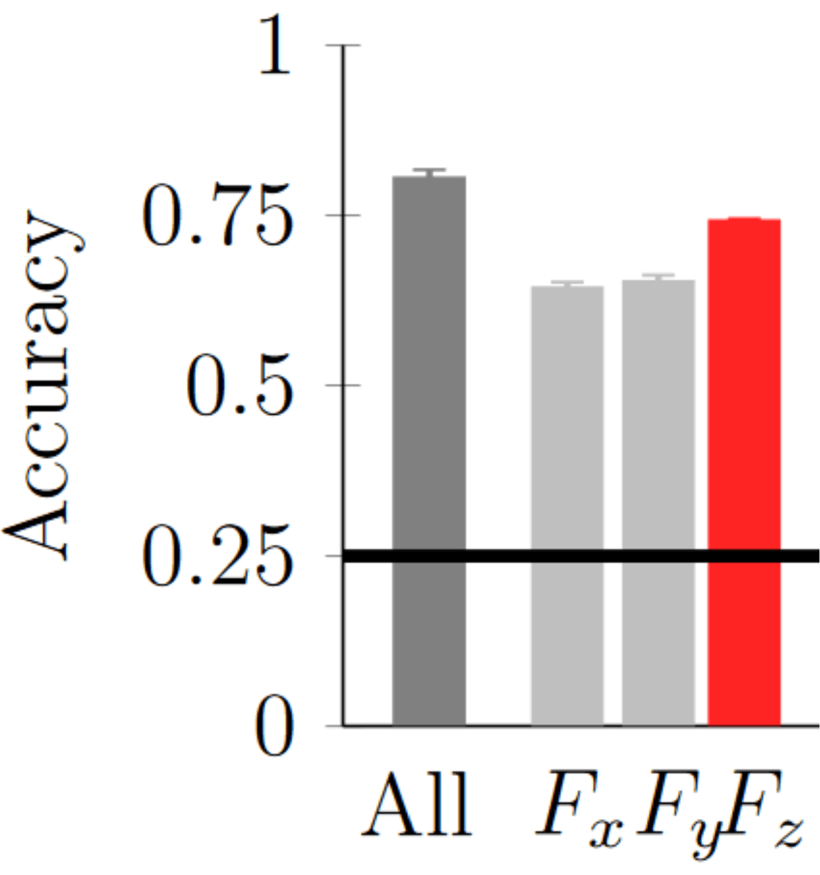
Classification with 50ms of 6DOF F/T Data
\(l_t = c_t^T\theta^* + \epsilon_\theta = p_t^T\phi^* + \epsilon_\phi\)
Optimize both simultaneously, regularizing them against each other.
Exploration vs. Exploitation: Contextual Bandits
(Gordon, ICRA 2021)Active Learning for pHRI: Spinning the Flywheel

User-Informed:
Metrics
Priorities
Limitations
Contact-Rich Active Learning:
Model-Based
Policy Simplification
Multimodal Sensing
Community-Based:
System Design
Implementation
Pain Point Identification