Contact-rich
model learning
High-performance
hybrid MPC
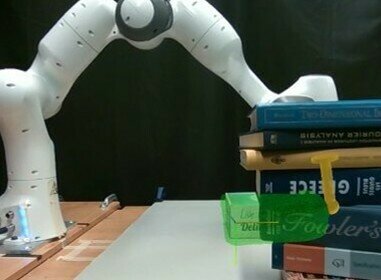
Vision + Physics = Vysics
Vision-Based
Visible Geometry
Object Poses
Masked RGBD video
Tracking and
Reconstruction
(BundleSDF)
Bianchini*, Zhu*, et al. "Vysics: Object Reconstruction Under Occlusion by Fusing Vision and Contact-Rich Physics." RSS. 2025.
Bibit Bianchini

Minghan Zhu
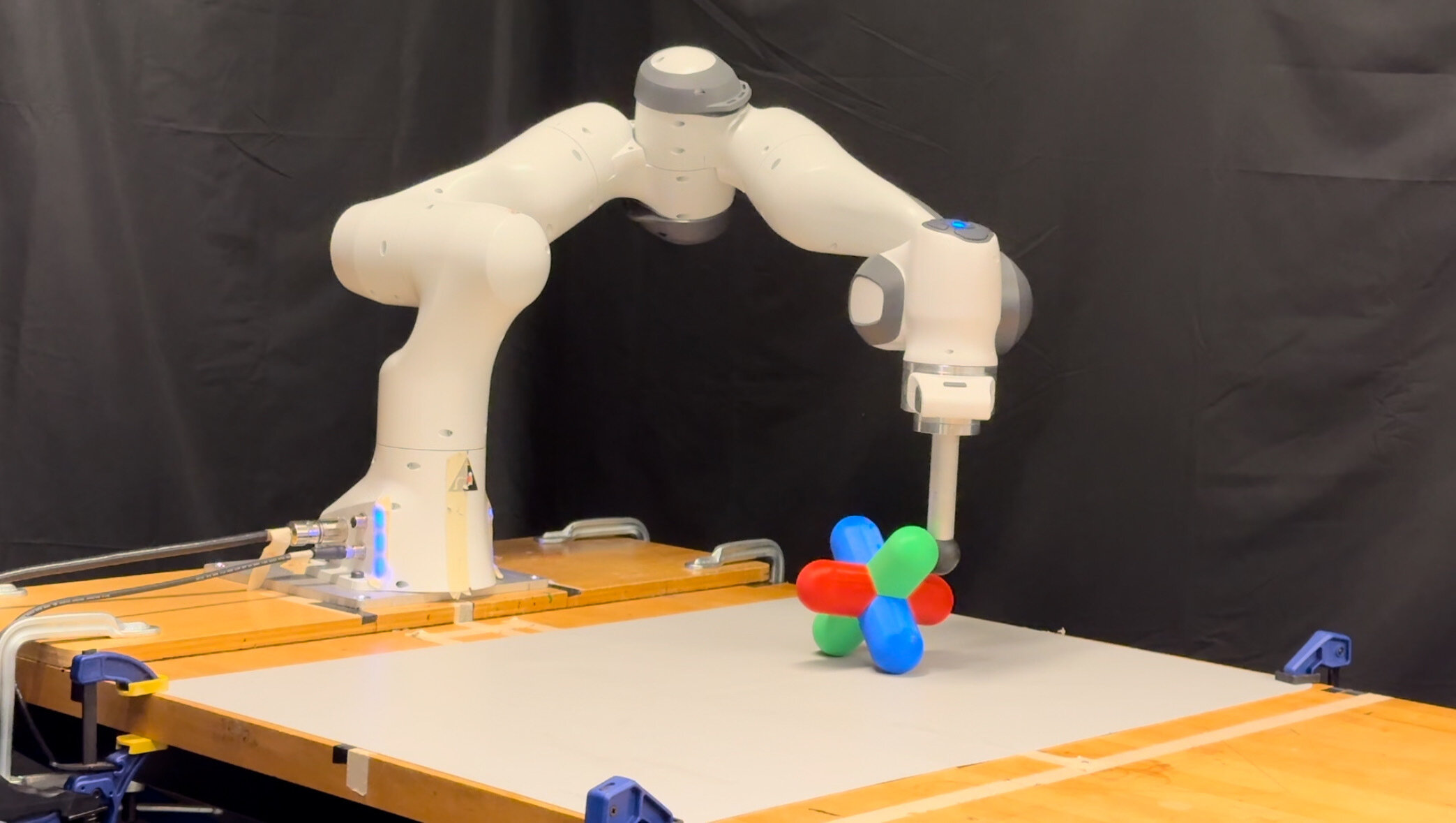
Physics-Based
“Physible” Geometry
Robot Proprioception
Model Learning
Inertia
Integrated Geometry
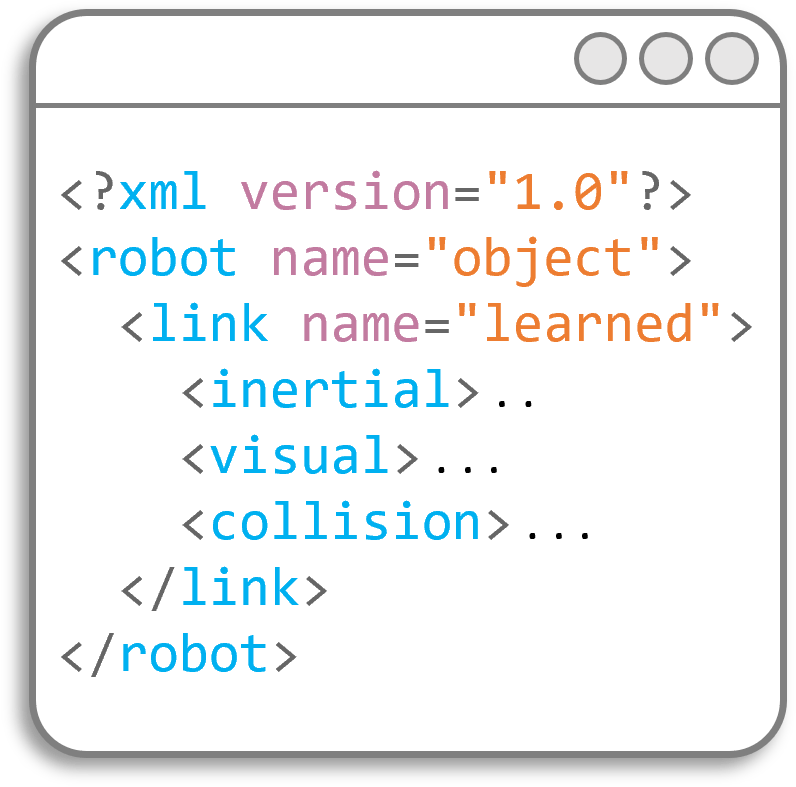
Object URDF
- Integrate with planning and control
- Leverage unlabeled or unstructured robot or human video
- As an intermediate representation to bridge to VLMs
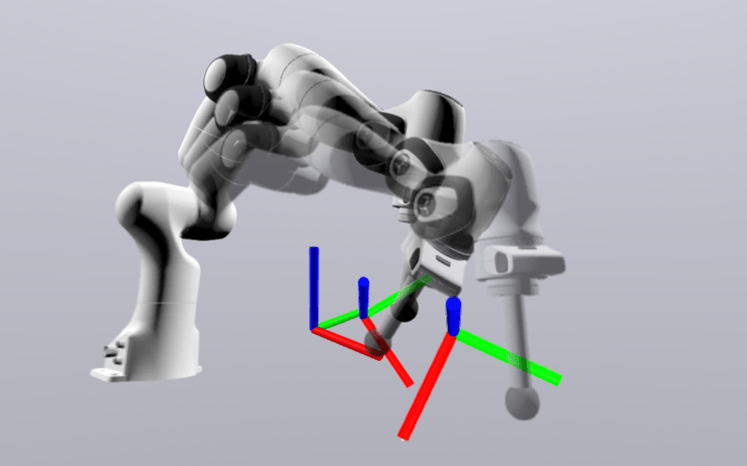
Active Tactile Exploration
[Gordon, Baraki, Bui, and P. Active Tactile Exploration for Rigid Body Pose and Shape Estimation. ICRA 2026]
Ethan Gordon
Choose:
-
Robot Trajectory \(r[t]\)
Measure:
-
Contact Boolean \(c_t\)
-
Contact Normal \(\hat{n}_t\)
-
Proprioception
Find:
-
Object Geometry \(\theta^*\)
-
Object Pose \(x^*_T\)
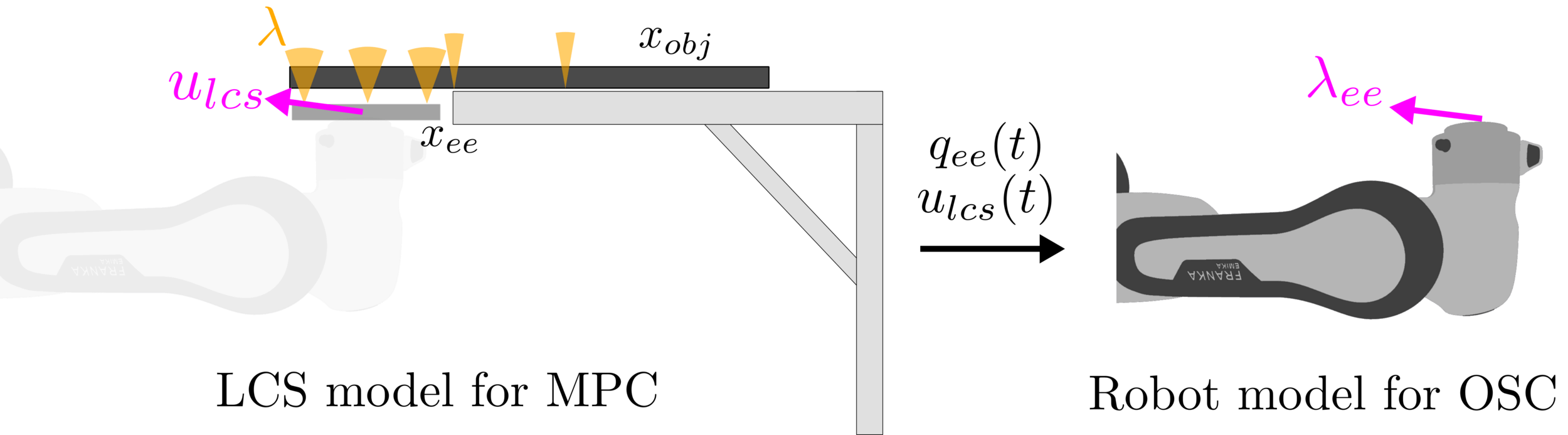
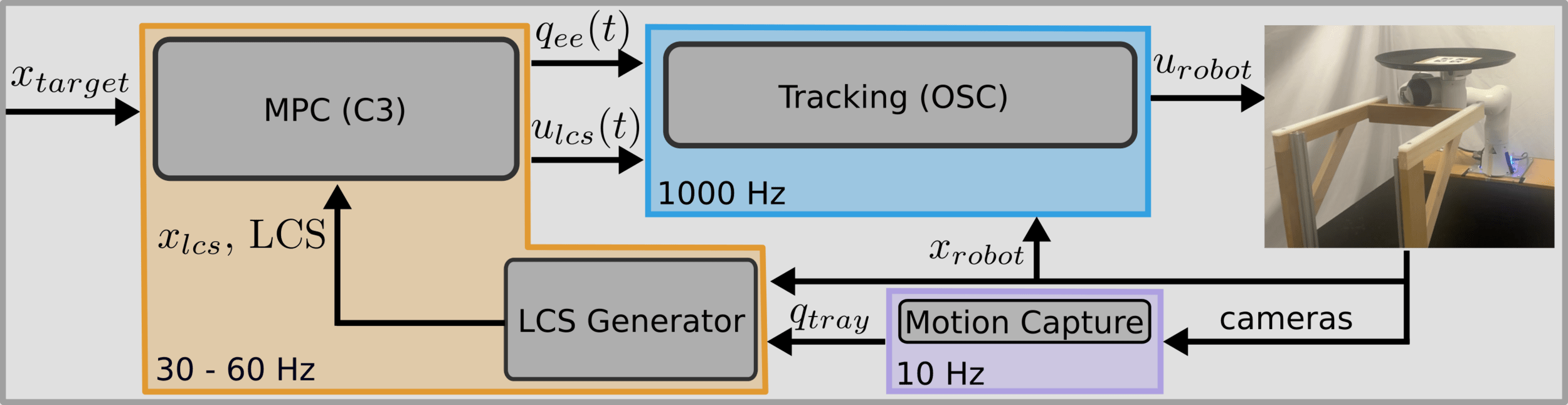
High-performance
hybrid MPC
Real-time control to simultaneously plan continuous motions and contact schedules
[Yang and P. Dynamic On-Palm Manipulation via Controlled Sliding. RSS, 2024. Outstanding Student Paper Award.]
Dynamic sliding and forceful dexterity
William Yang
Reliable and precise real-time control that repeatedly achieves arbitrary pose targets given only a 3D object model
Approximately Global Contact-Implicit MPC via Sampling and Local Complementarity
Bibit Bianchini
Sharanya Venkatesh

Push Anything: Single- and Multi-Object Pushing From First Sight with Contact-Implicit MPC
Hien Bui

Yufeiyang Gao
Haoran Yang

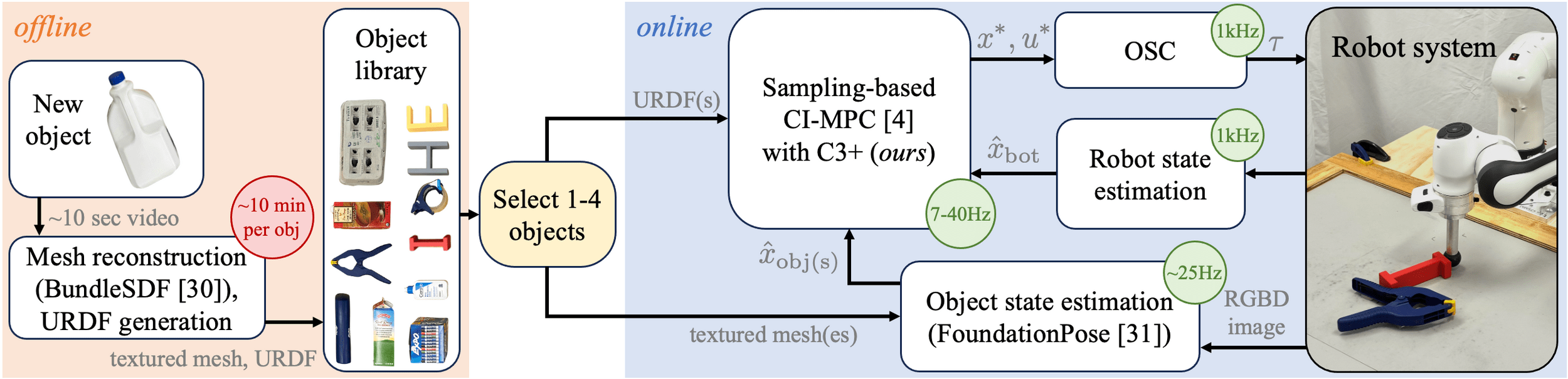
Simultaneously plan 19 possible frictional contacts
10x
2 objects
- 100/102
- Avg. 1.6 min
15x
3 objects at a time
20x
4 objects at a time
Aileen Liao
