Tractable Adaptability
Ethan K. Gordon
Postdoc, University of Pennsylvania
PhD 2023, University of Washington



Active Learning for Contact-Rich Assistive Manipulation

Ethan at Lehigh:
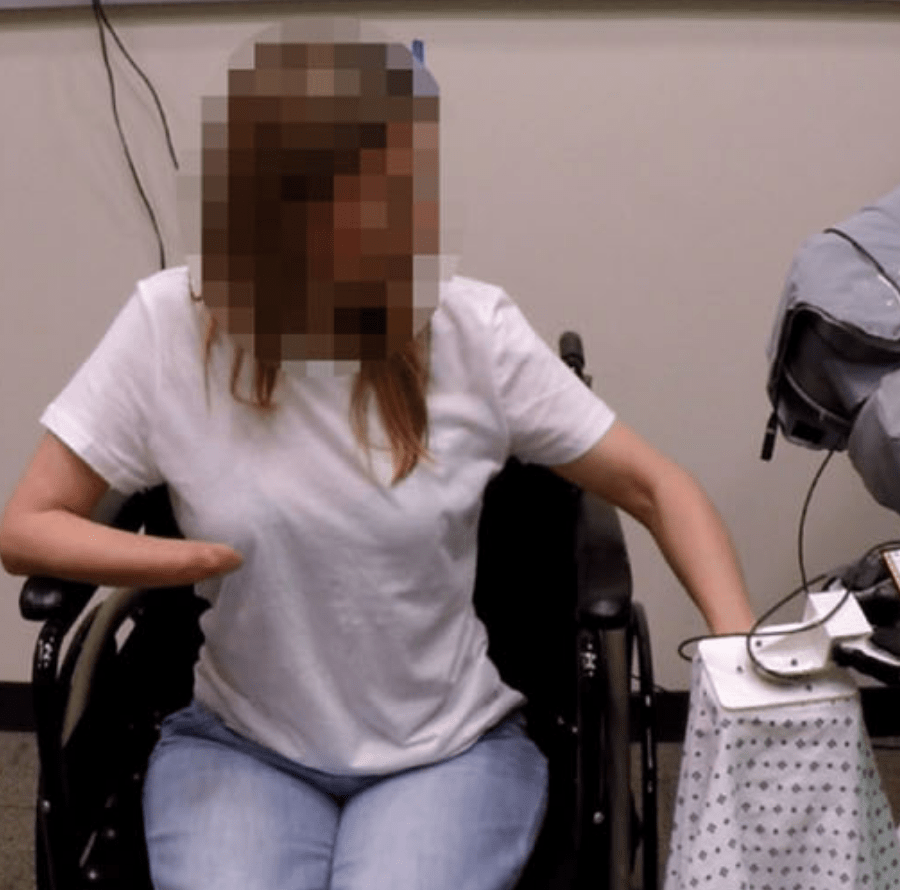
Physically Assistive Robots (PARs)
“If I can have a robot do it, I can learn to adapt to it, but it would be me feeding me, and that would be huge”
Tyler Schrenk
1985-2023

The Promise of PARs:
- Empowerment
- Independence
Tractable Adaptability
How can robots efficiently learn, during deployment, how to manipulate previously-unseen objects?
What is needed for pHRI?
Contact-Rich Manipulation
- Sliding to clean the spoon and bowl
- Shaking to smoothen
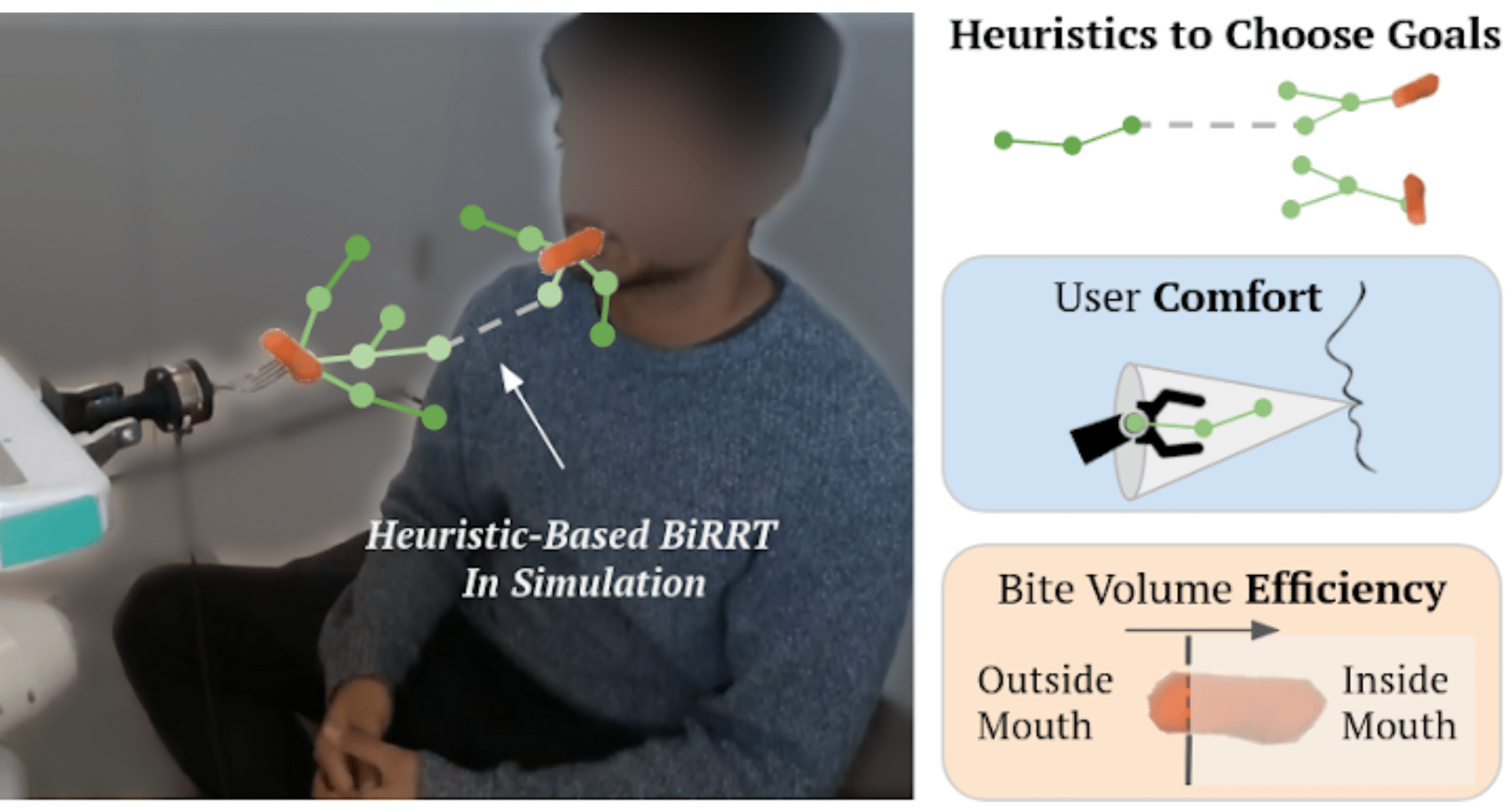
- In-Mouth Hand-Off
(vision-denied)
Online Adaptation
- Bite Size Adjustment
What is needed for pHRI?
Online Adaptation
- Totally Different Food
- Multi-bite: different shapes for each bite
There is no time for
re-training!
The Technology/Application Cycle
Support
Inform
Physically Assistive Robots (PARs)
Active Learning in Contact

The Technology/Application Cycle
Support
Inform
Physically Assistive Robots (PARs)
Active Learning in Contact
HRI 2025
HRI 2020
HRI 2024
NIPS 2018
RA-L 2022
ICRA 2023
ICRA 2022
Preprint 2026
ISRR 2019
IROS 2020
ICRA 2023
CoRL 2023
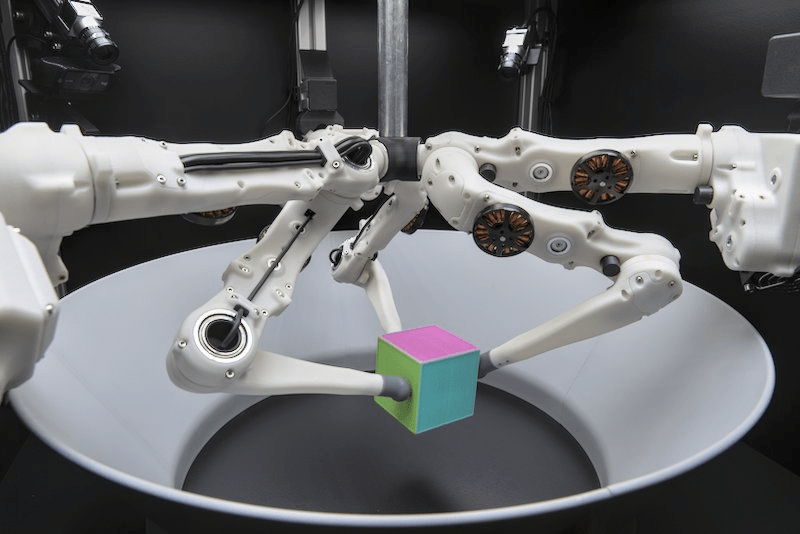
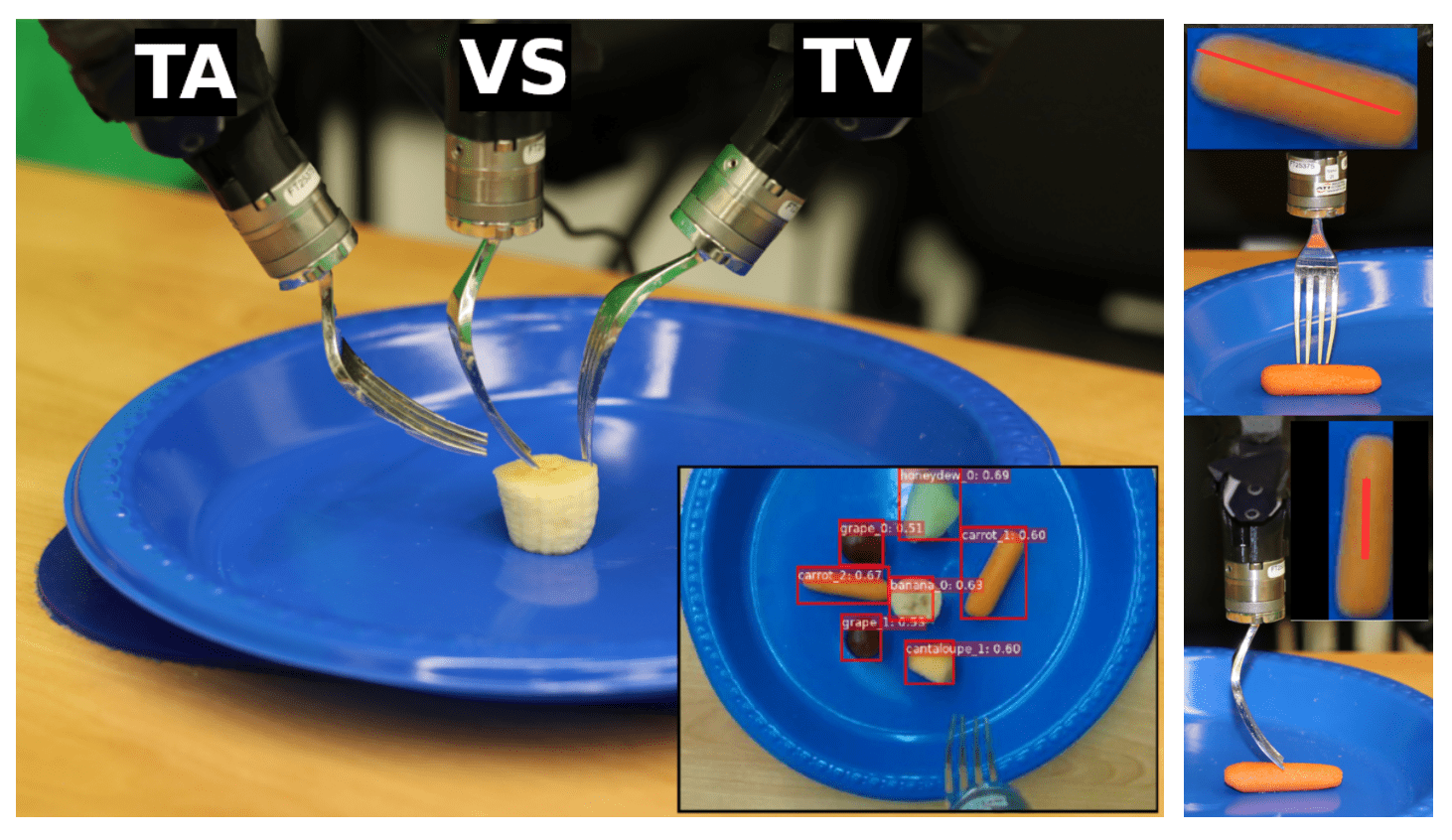
Autonomous Bite Acquisition
Problem: Bite Acquisition
Online Bite Acquisition Challenges
- Large Action Space (whole trajectory) OR Sparse Reward
- Unknown Dynamics / State Transition: food simulation is hard!
Solution: Data-Driven Policy-Space Simplification
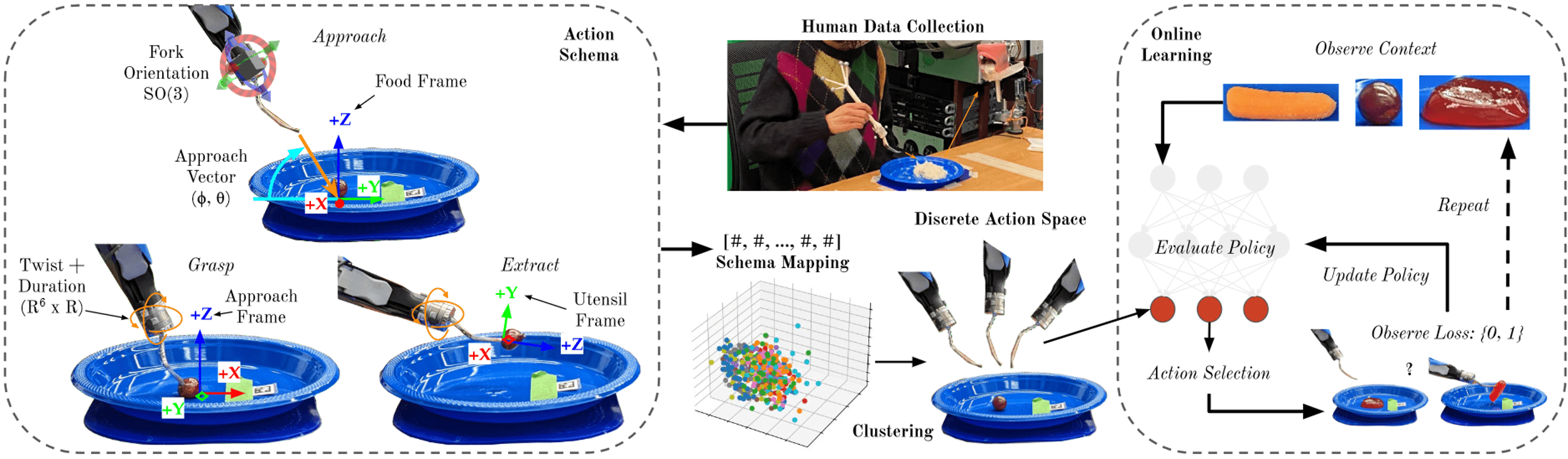
(Gordon, CoRL 2023)Learn This Online!
Emergent Behavior
Wiggling
Tilting
High Pressure
Scooping
Multimodal Online Learning
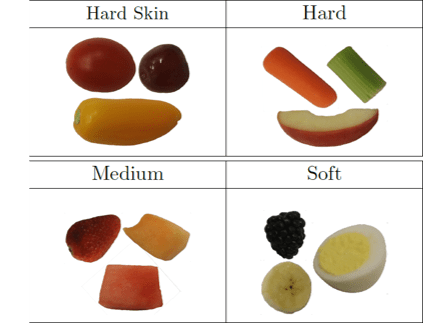
- High-Dimension State Space: Foods are really diverse!
Solution: Haptic Policy Regularization
(Bhattacharjee, R-AL 2019); (Gordon, IROS 2020); (Gordon, ICRA 2021)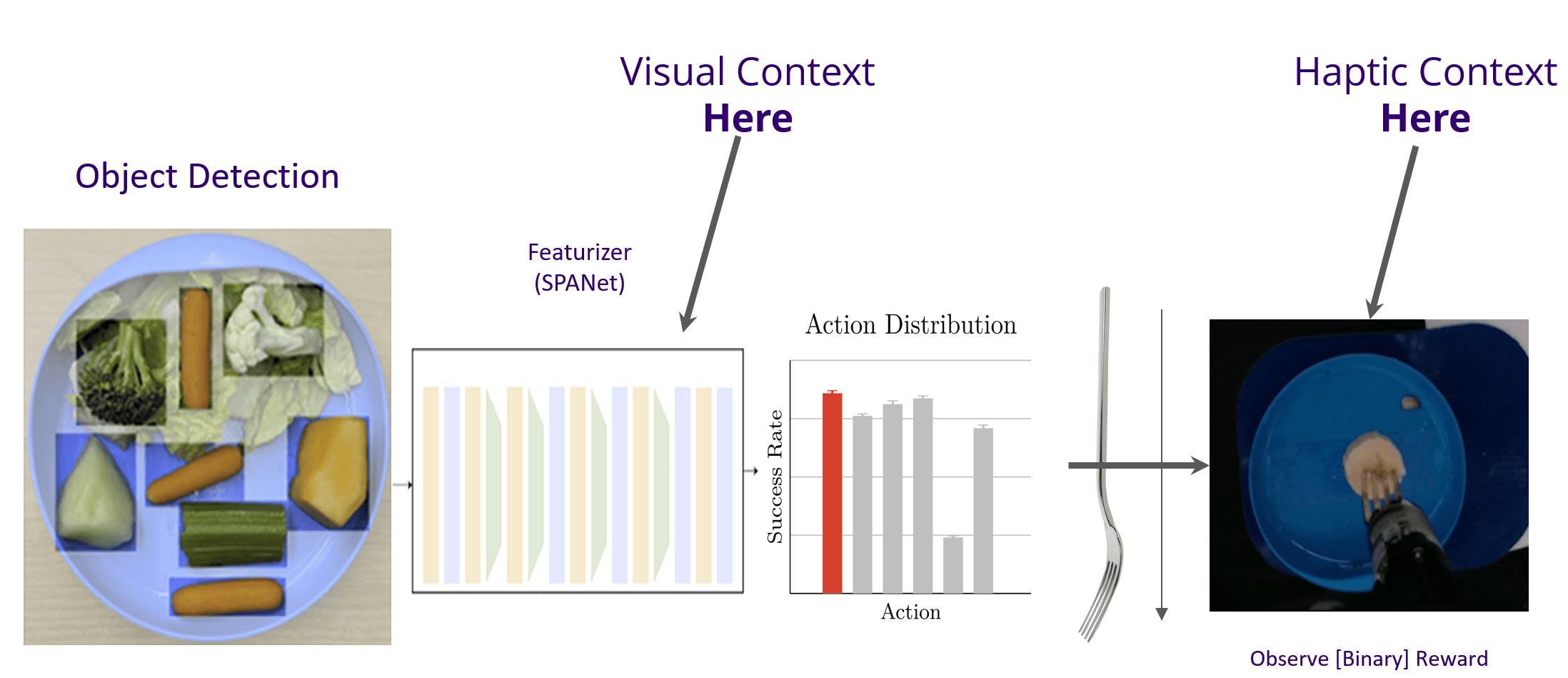
Optimize Jointly
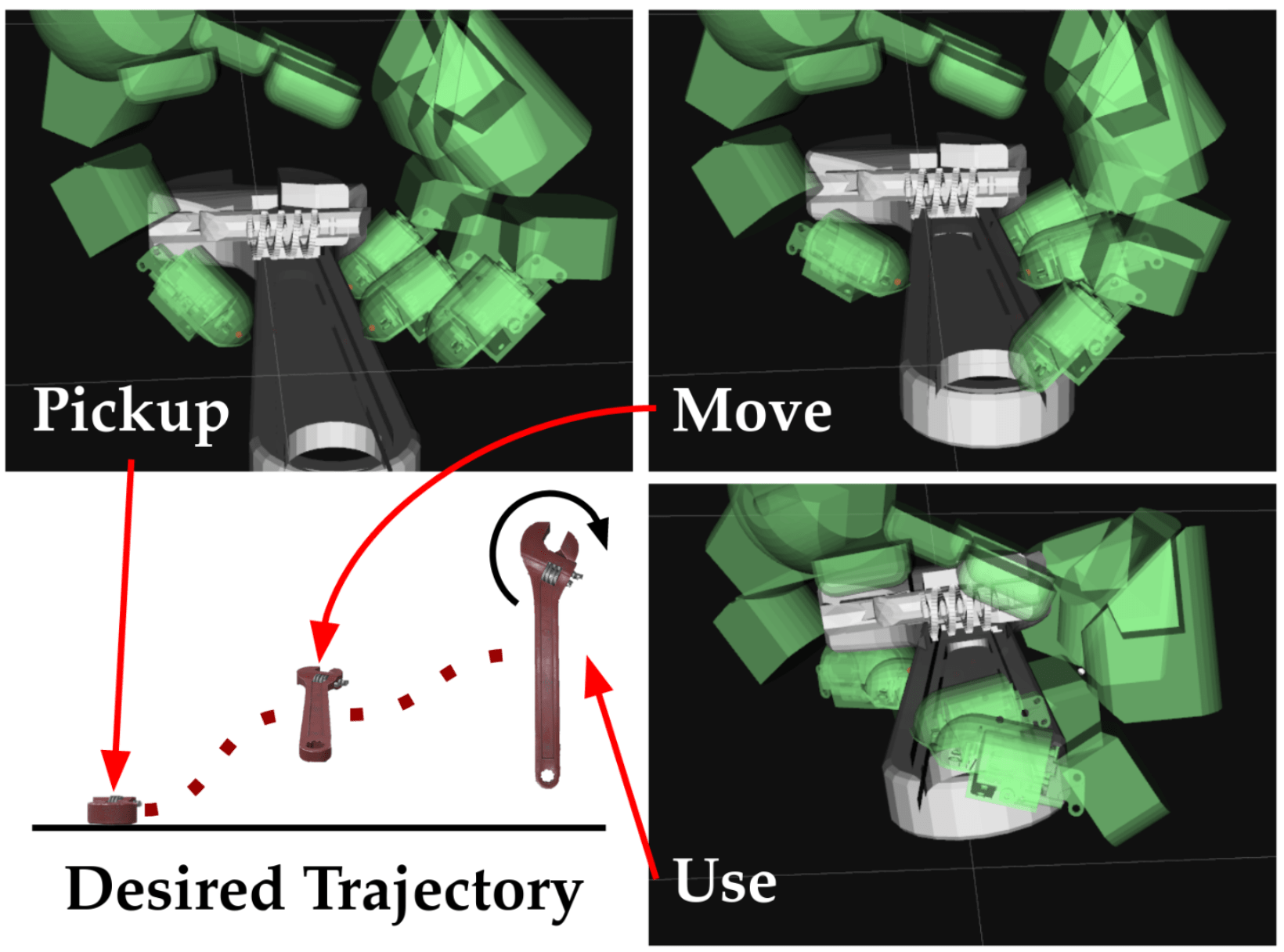
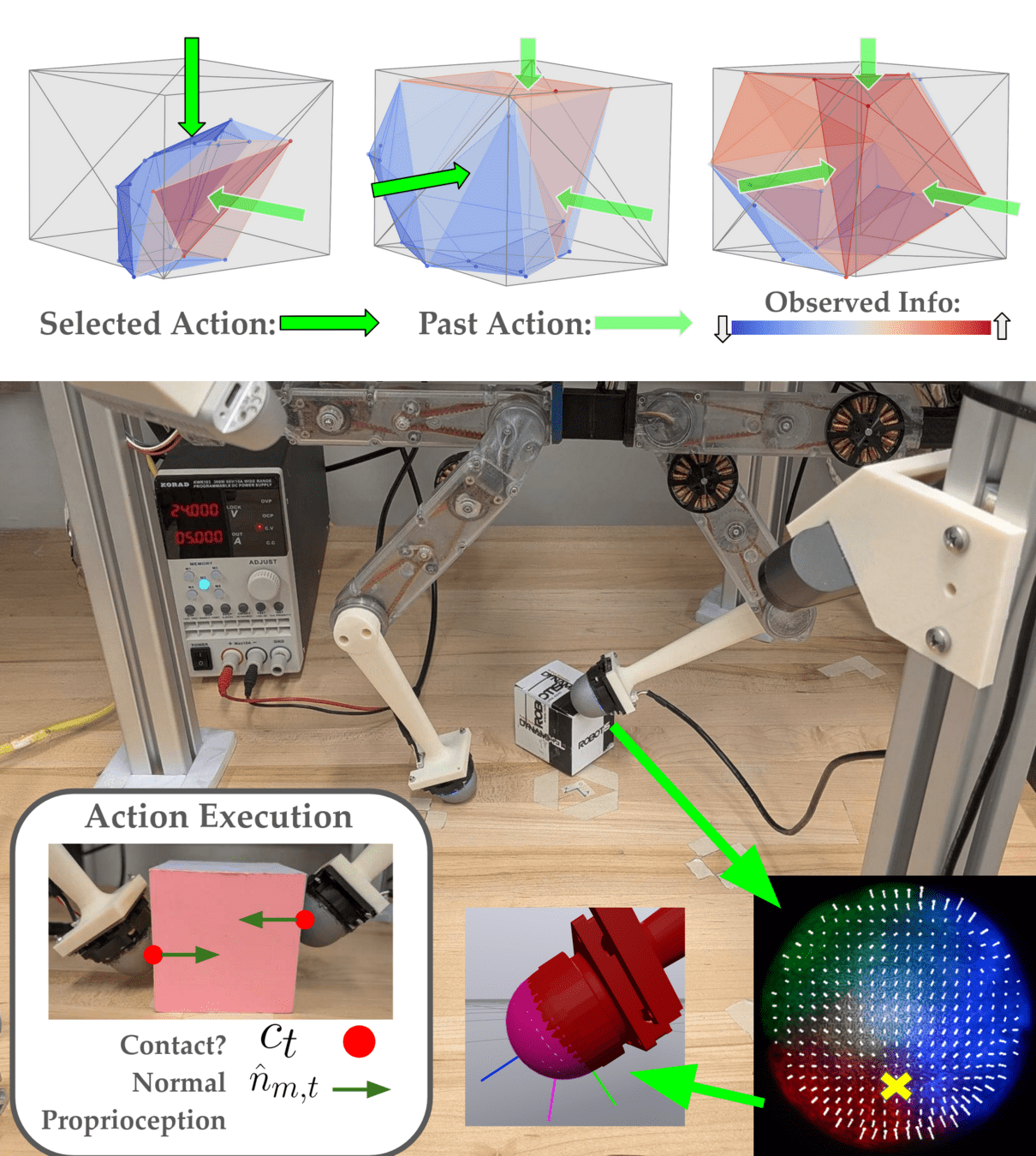
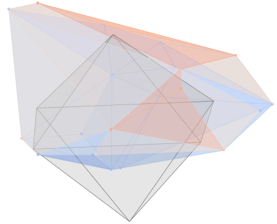
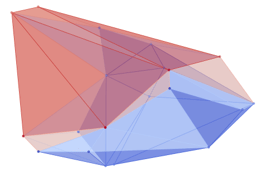
Active Learning in Contact
Dynamic Object System Identification
Choose:
-
Robot Trajectory \(r[t]\)
Measure:
-
Contact Boolean \(c_t\)
-
Contact Normal \(\hat{n}_t\)
-
Proprioception
Find:
-
Object Geometry \(\theta^*\)
-
Object Pose \(x^*_T\)
Learning with a Violation-Implicit Loss
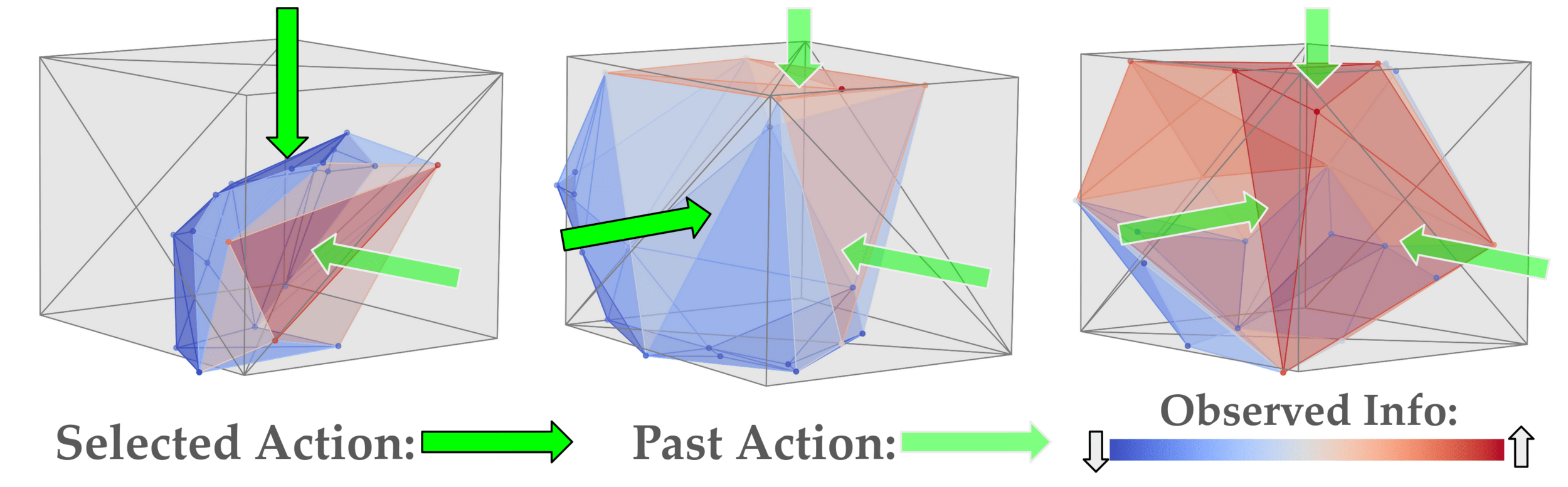
Information Maximization In Action
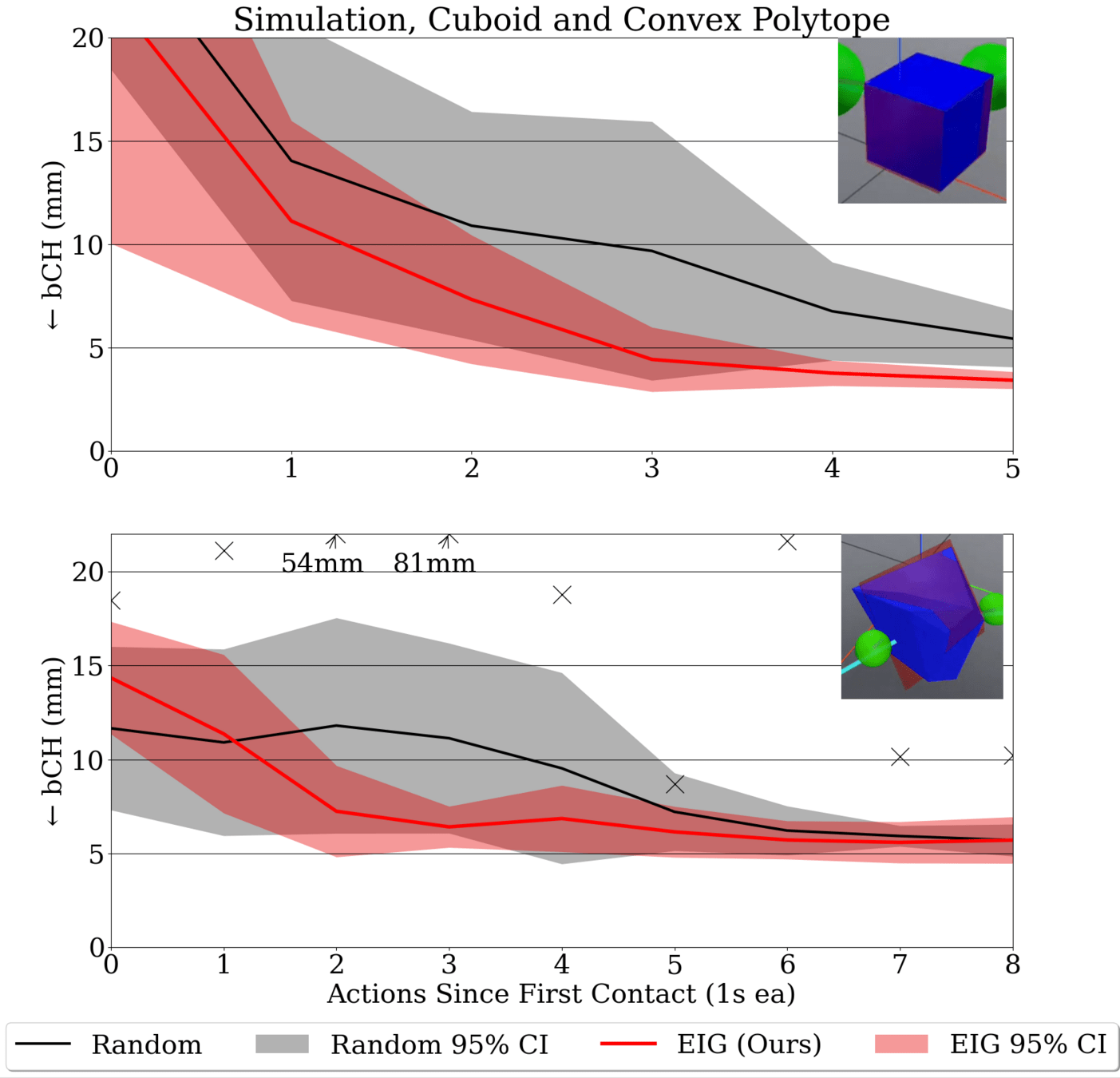
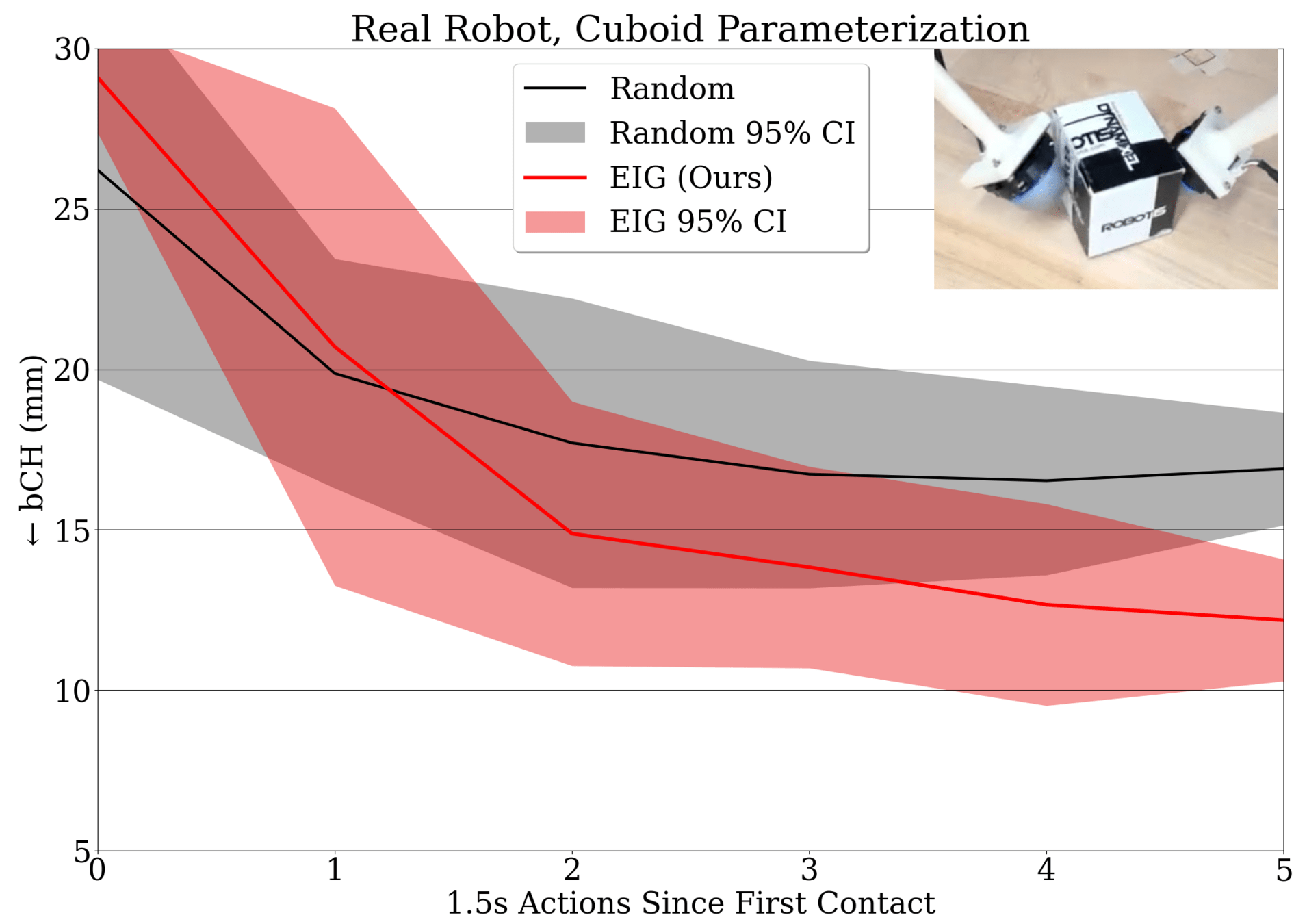
Expected Information Gain (EIG)
Learn; Compute
Observed Info \(\mathcal{I}\)
Sample + Simulate
Expected Fisher Info \(\mathcal{F}\)
\(\max EIG := \log\det\left(\mathcal{F}\mathcal{I}^{-1} + \mathbf{I}\right)\)
Choose actions where simulated, expected Fisher info is distinct from Observed info.
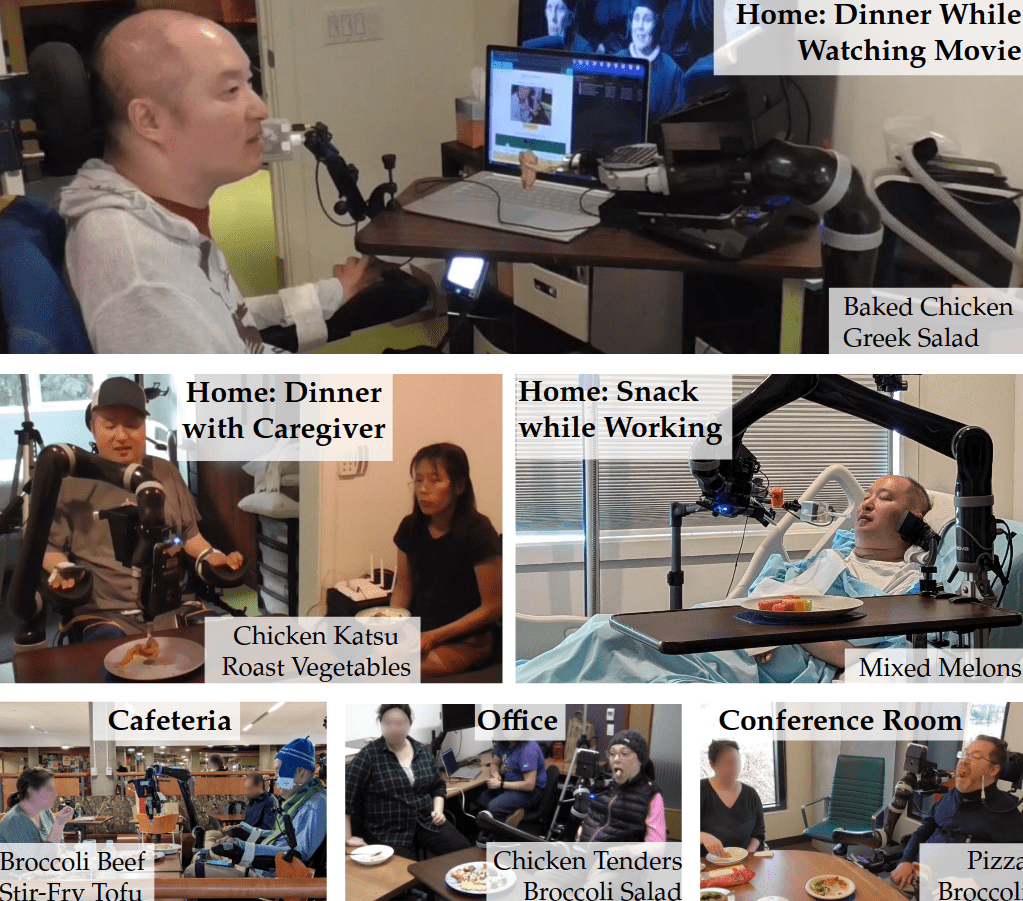
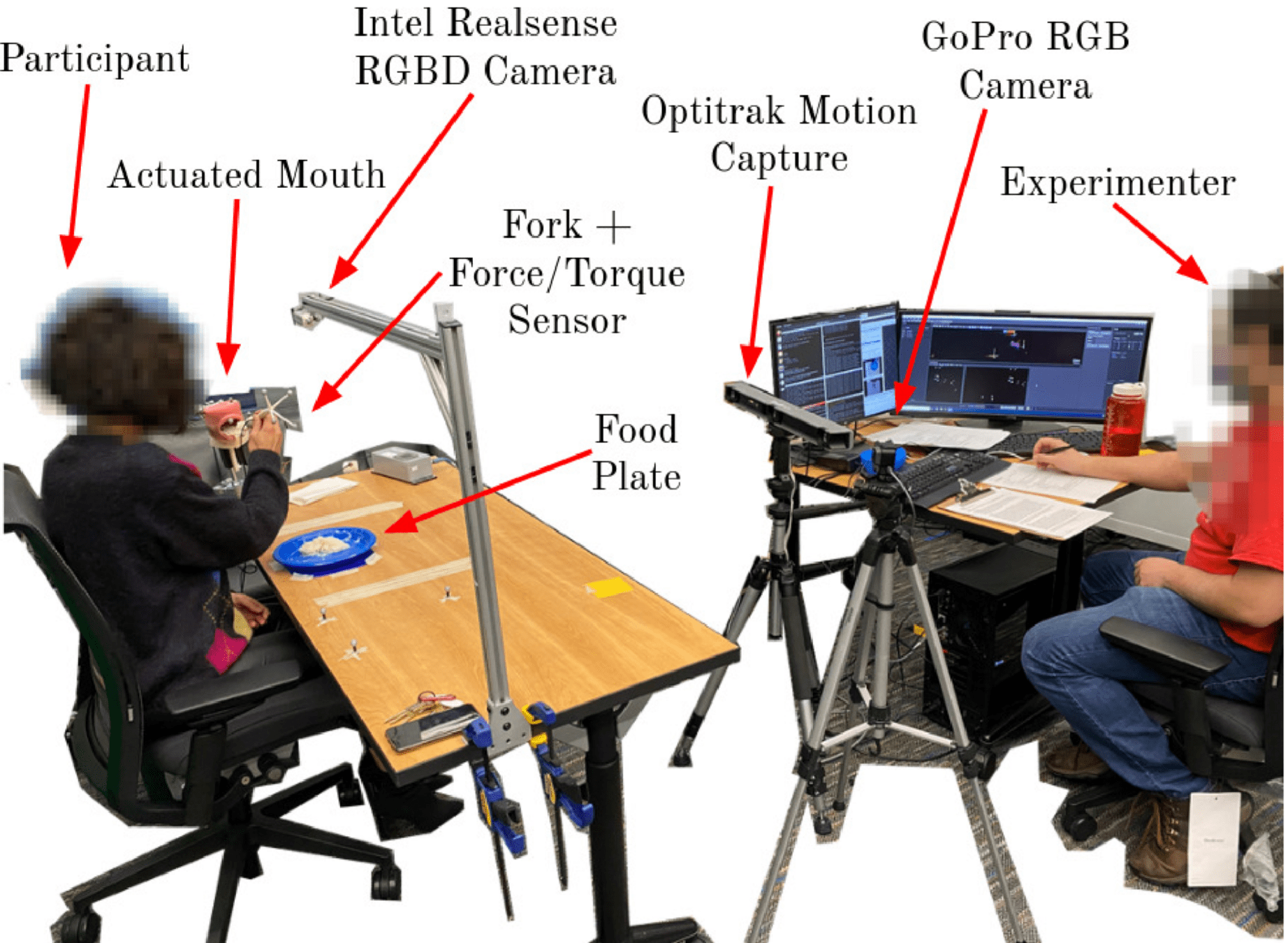
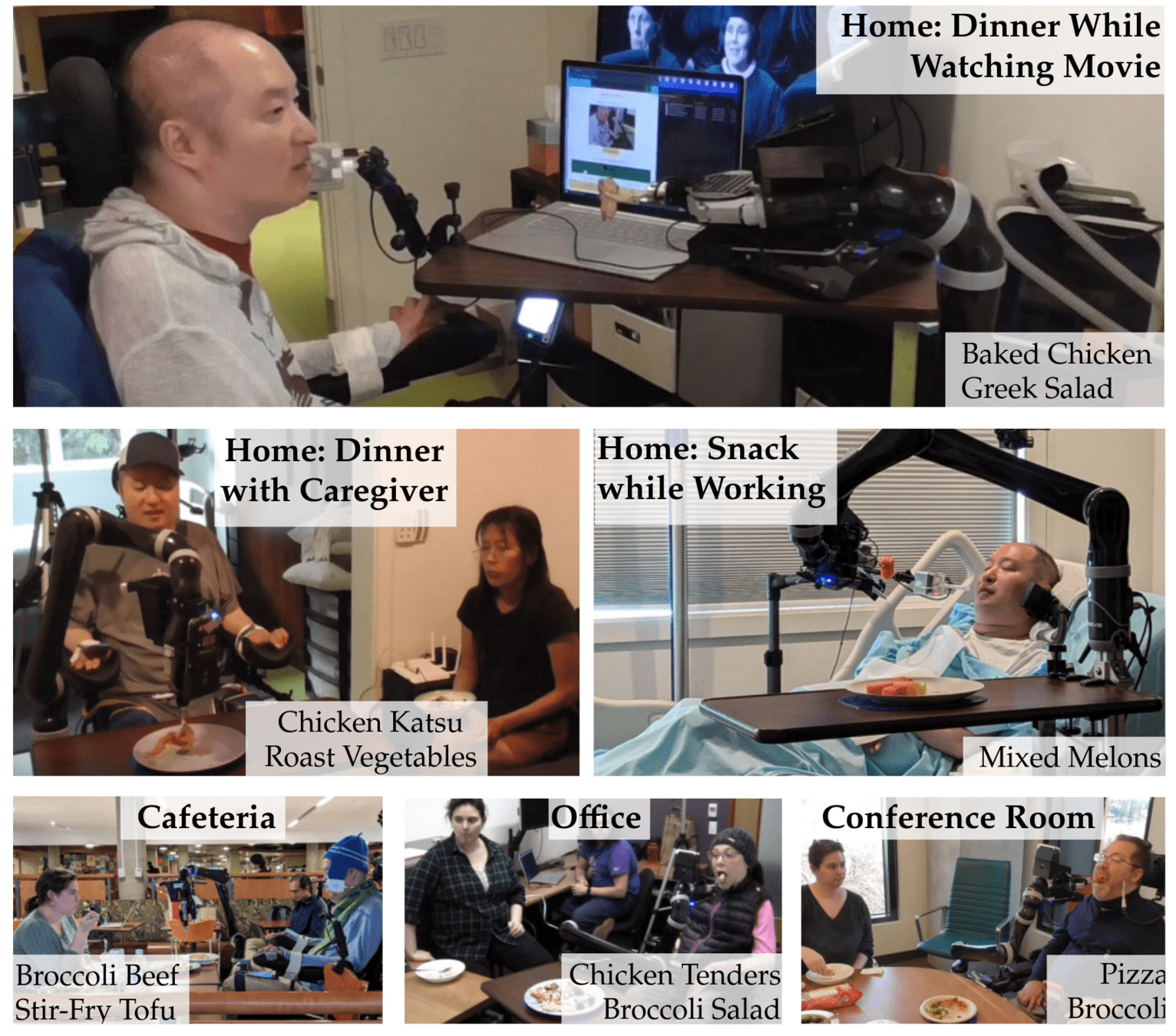
Robot-Assisted Feeding
User Studies Capture Diversity
(Bhattacharjee, HRI 2020)User Studies Capture Metrics
(Bhattacharjee, HRI 2020)Trade-off between autonomy (with chance of error) and high-effort manual control.
What errors are tolerable?
Community-Based Participatory Design
(Gordon, HRI Companion 2024)Community-Based Participatory Design
(Nanavati, HRI 2025)Research Plans
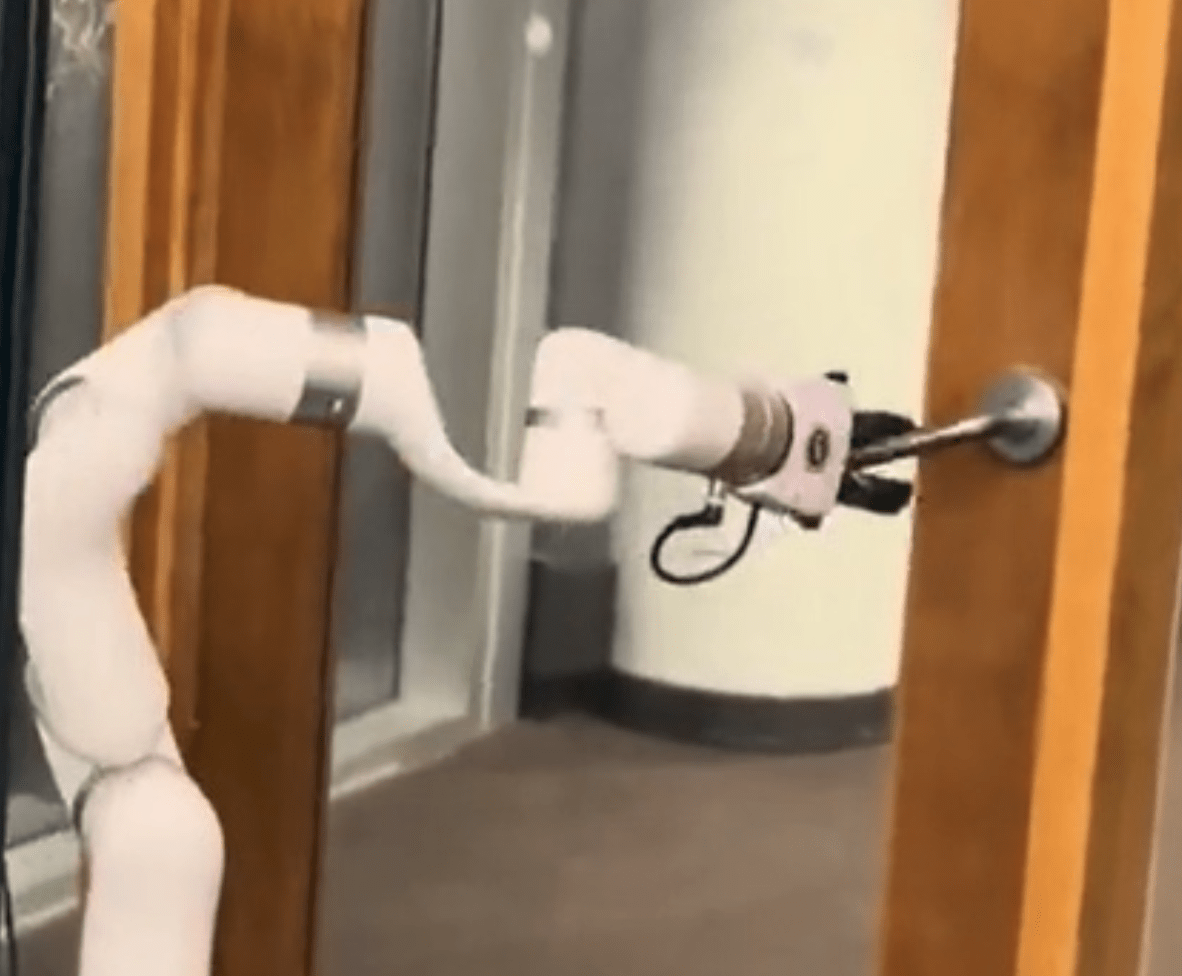
Safe Active Exploration in Contact
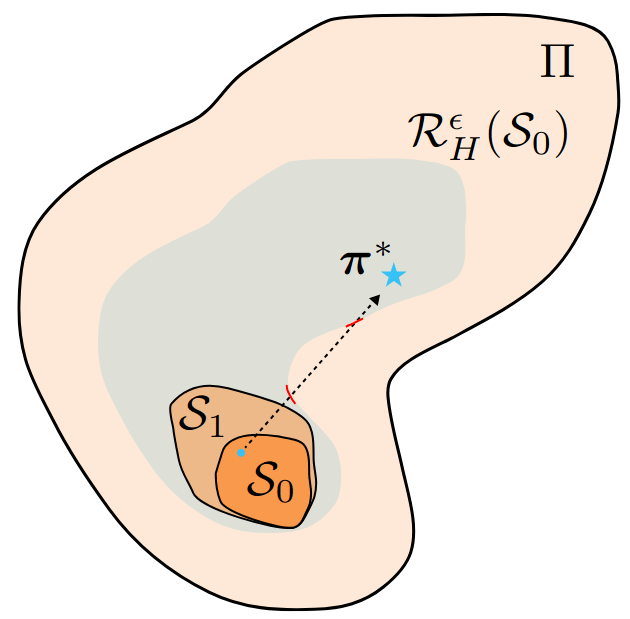
(ActSafe, ICLR 2025)Research Plans
Dressing "Acquisition"
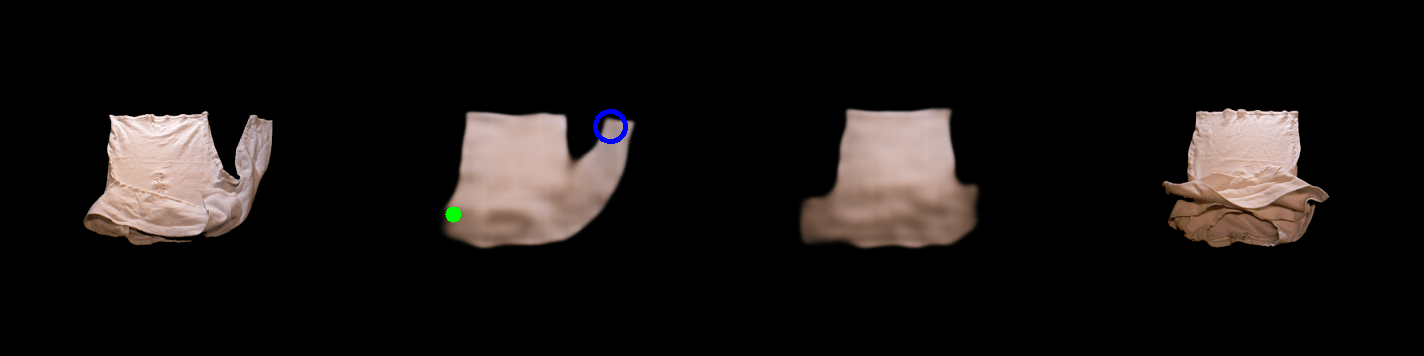

(TOORAD, Autonomous Robots 2019)Research Plans
Multi-Function PARs


?
Thank you!




DAIR Lab
Amal Nanavati



Tractable Adaptability
Ethan K. Gordon
Postdoc, University of Pennsylvania
PhD 2023, University of Washington
Active Learning for Contact-Rich Assistive Manipulation
Structure Through Expert-Defined Heuristics
- Qualitative Taxonomy of Single-Utensil Bite Acquisition
- Convert to Action Schema:
- \(\mathbb{R}^{14} \times SO(3) \times S^2\)
- Force and Torque Thresholds
Benefits: Interpretable, Continuity (Similar Numbers \(\rightarrow\) Similar Action)
(Gordon, CoRL 2023); (Bhattacharjee, R-AL 2019) 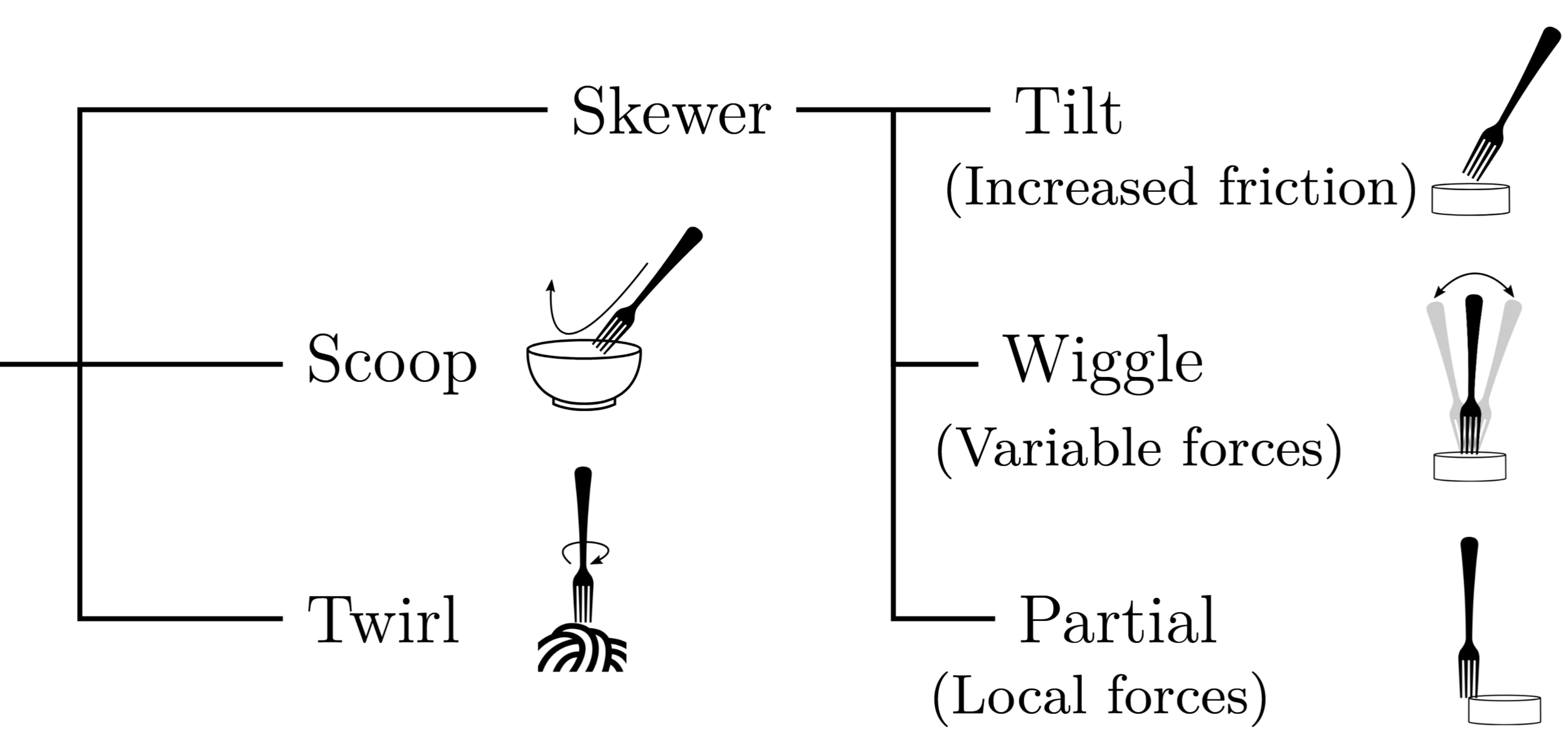
Data-Driven Discretization
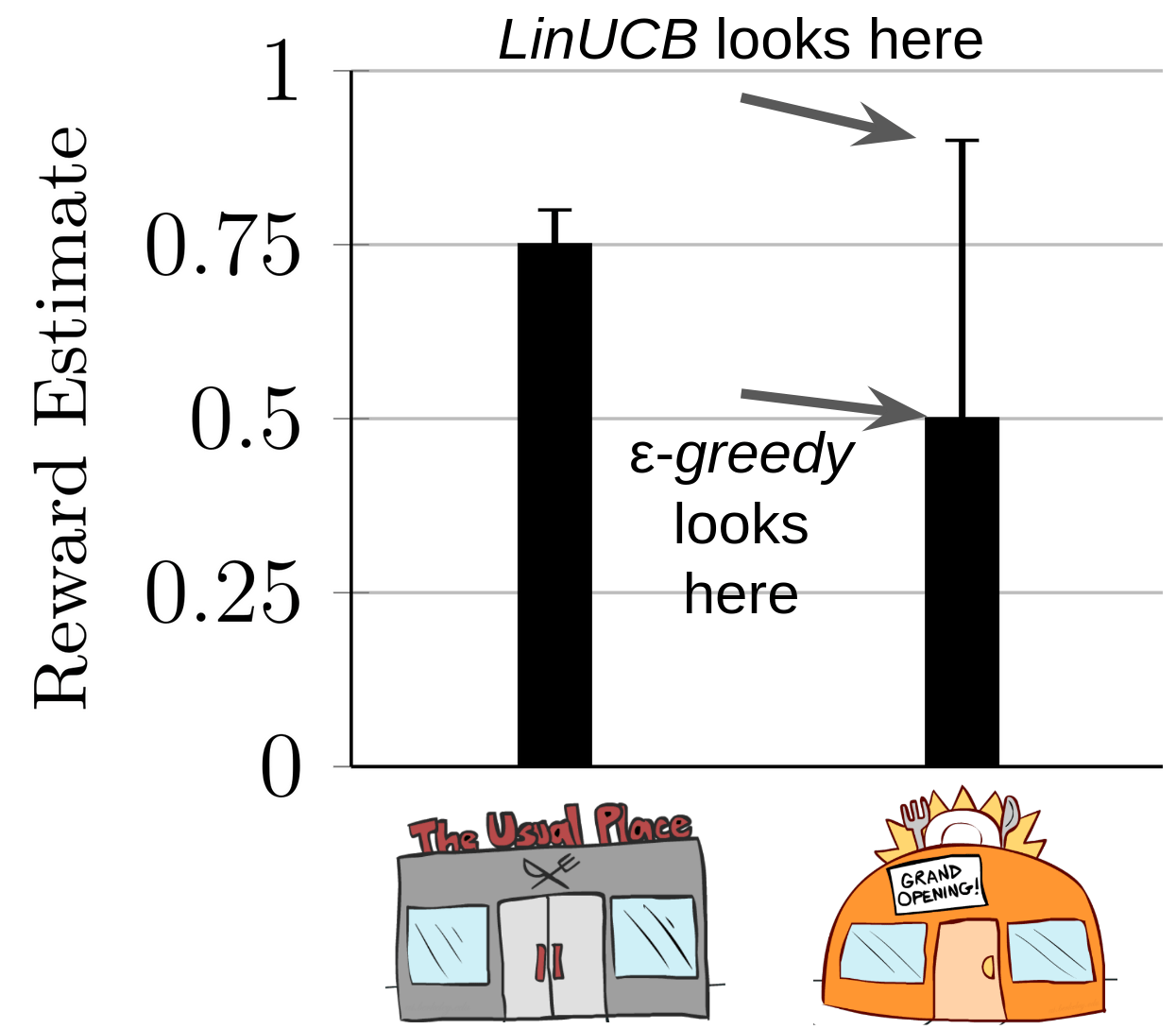
(Gordon, CoRL 2023)Exploration vs. Exploitation: Contextual Bandits
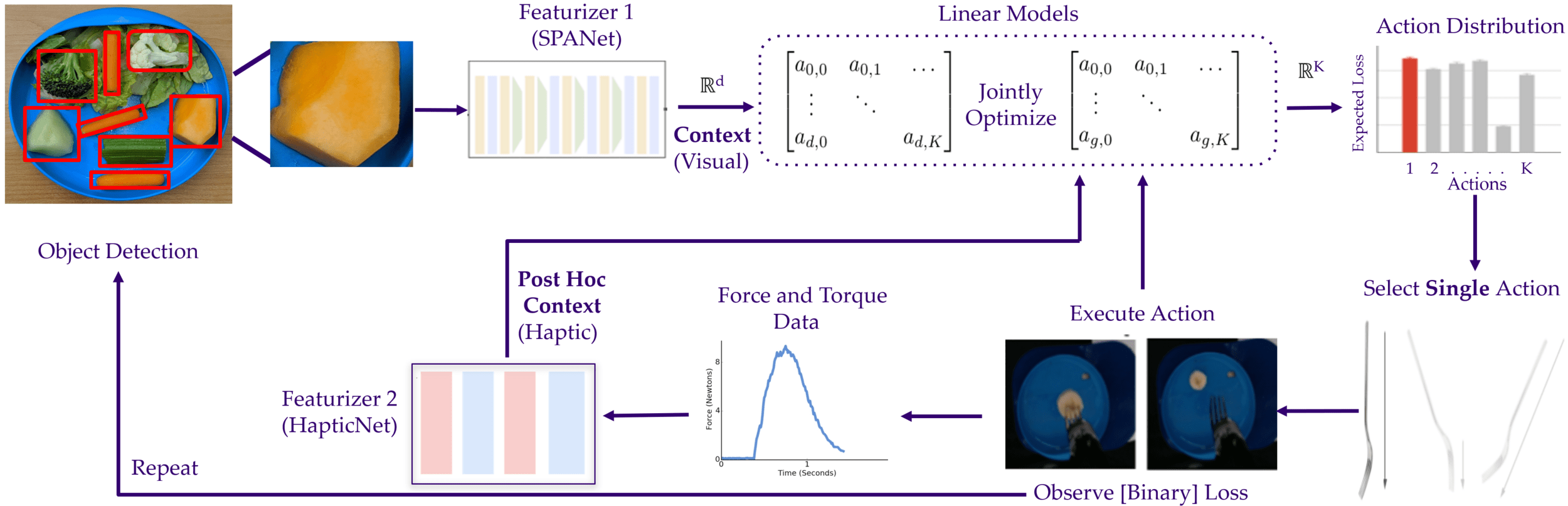
(Gordon, IROS 2020); SPANet from (Feng, IJRR 2019)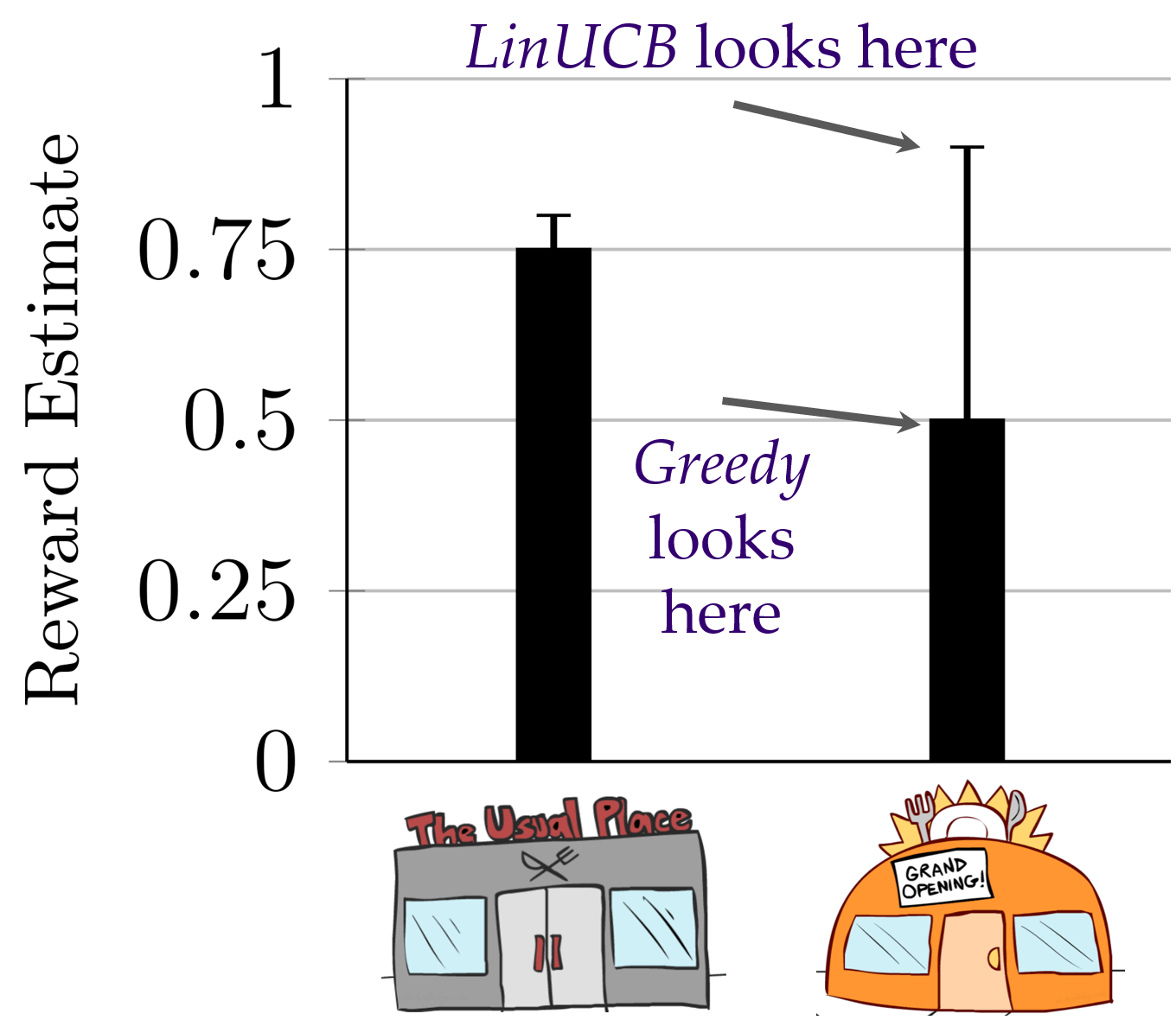
Incorporating Haptic Information
(Gordon, ICRA 2021); (Bhattacharjee, R-AL 2019)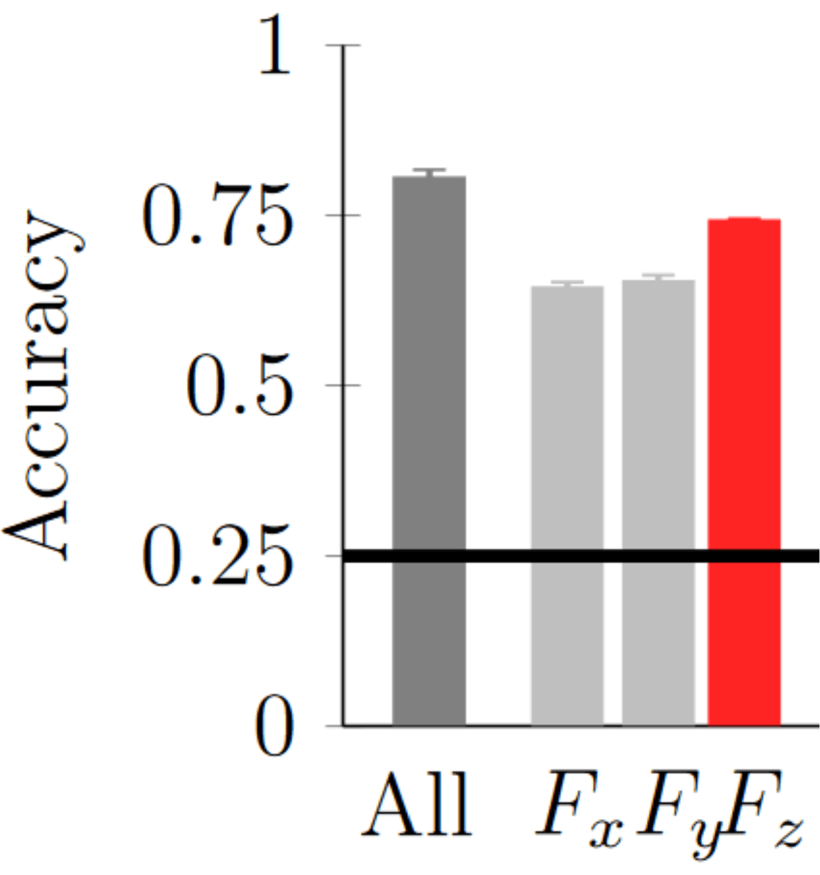
Classification with 50ms of 6DOF F/T Data
\(l_t = c_t^T\theta^* + \epsilon_\theta = p_t^T\phi^* + \epsilon_\phi\)
Optimize both simultaneously, regularizing them against each other.
Exploration vs. Exploitation: Contextual Bandits
(Gordon, ICRA 2021)Active Learning for pHRI: Spinning the Flywheel

User-Informed:
Metrics
Priorities
Limitations
Contact-Rich Active Learning:
Model-Based
Policy Simplification
Multimodal Sensing
Community-Based:
System Design
Implementation
Pain Point Identification