Active Tactile Exploration for Dynamic Pose and Shape Estimation
Ethan K. Gordon, Bruk Baraki, Hien Bui, Michael Posa
https://dairlab.github.io/activetactile
Supported by: NSF CAREER Award FRR-2238480, RAI Institute
ethankg@seas.upenn.edu
RESULTS
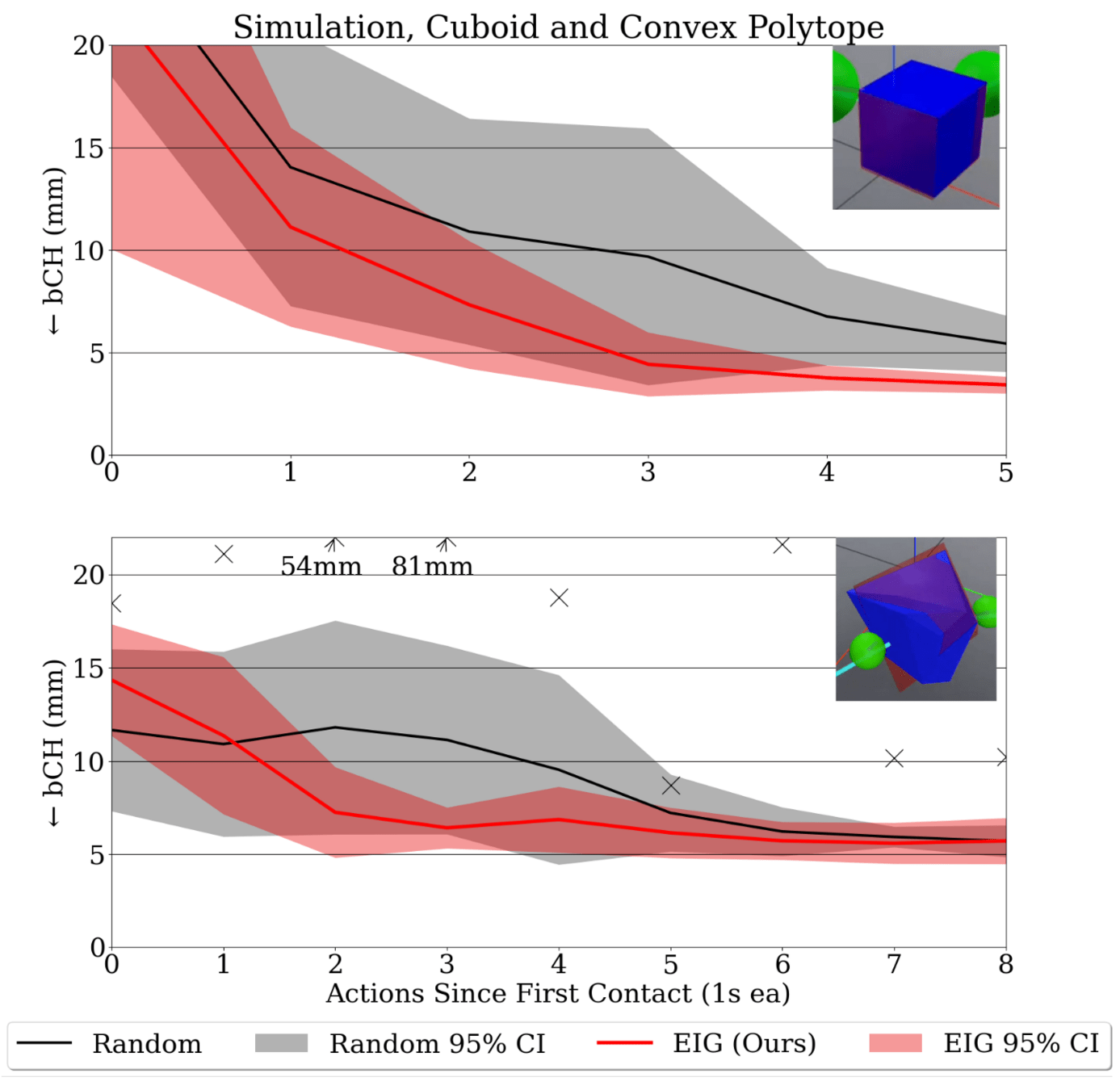
- Bidirectional Chamfer Distance (bCH) Evaluation Metric
- (Left) Simulated results for cuboid and polytope parameterizations.
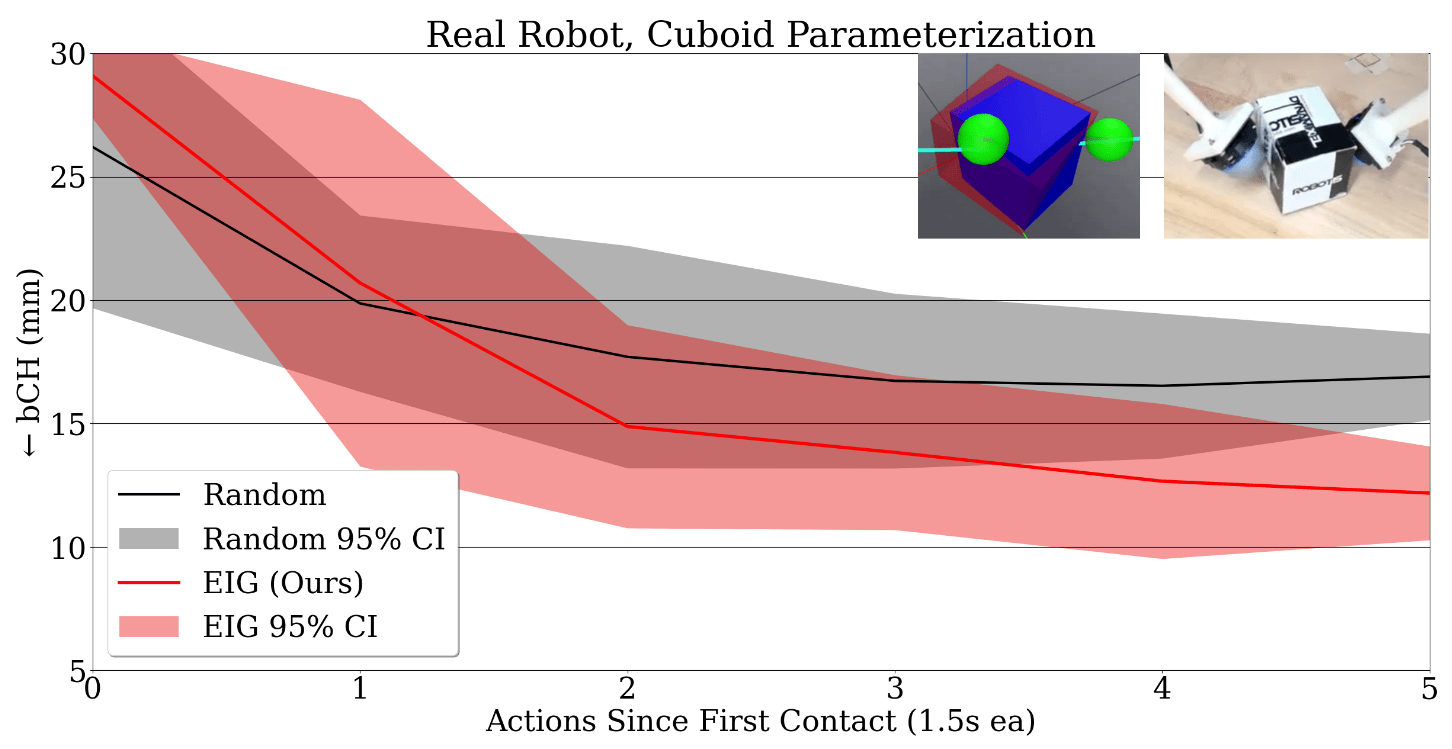
- (Top Right) Real robot results
- Significant improvement over object-directed actions from random approach directions.
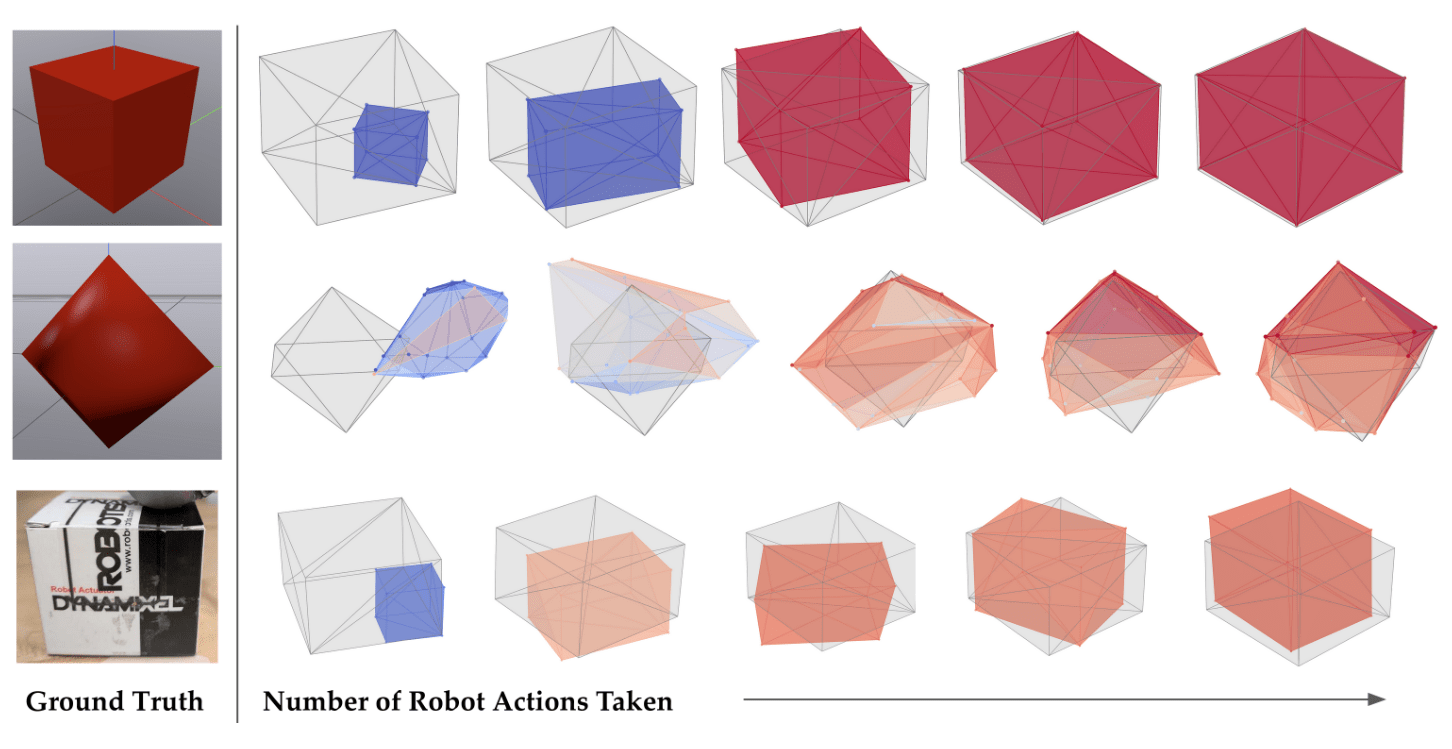
- (Bottom Right) Example learning curves. Observed information increases with more data.

EXPERIMENT SETUP
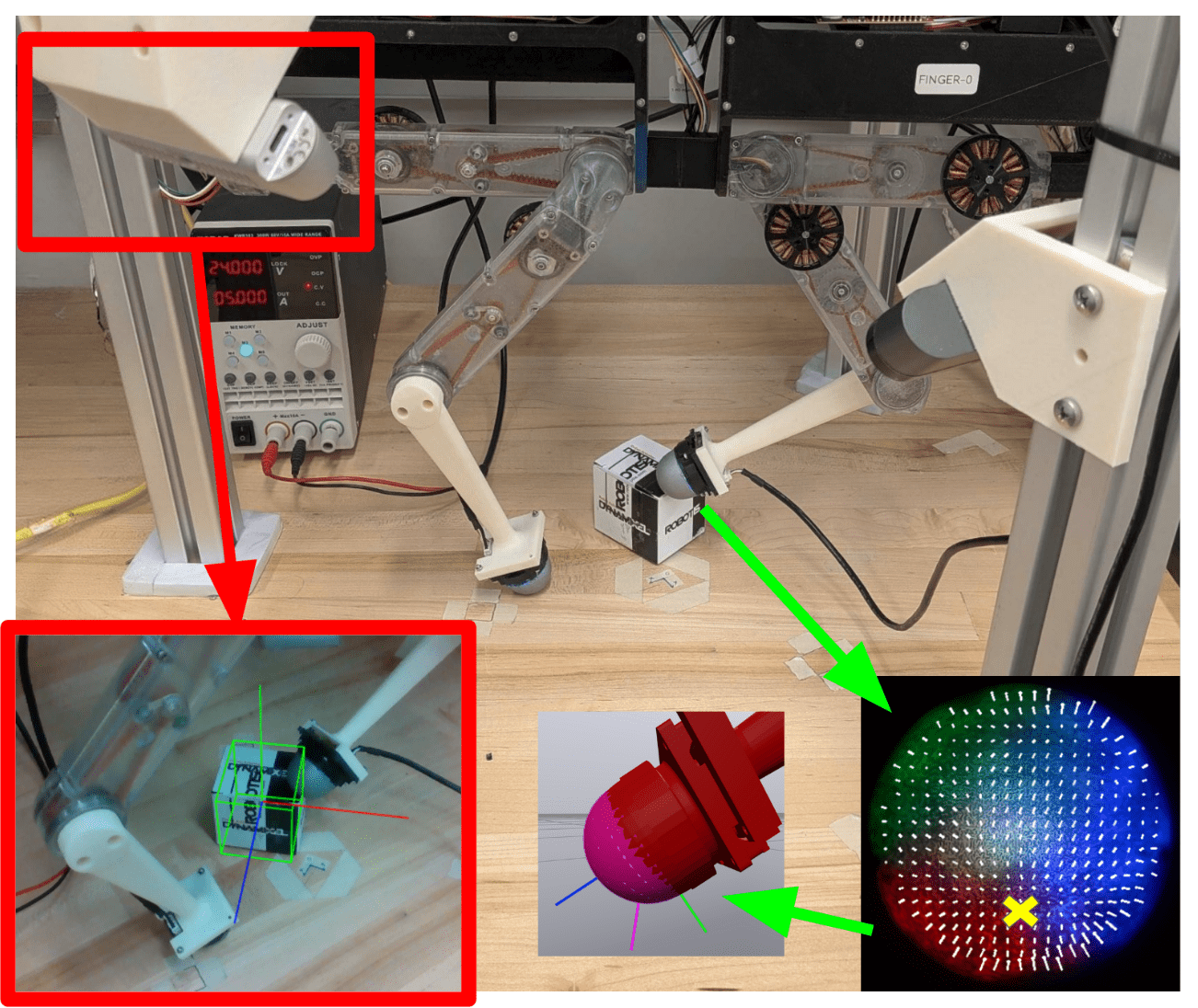
- Trifinger Robot
- Densetact 2.0 (Do, 2023)
- Contact Boolean \(c_t\) and Normal \(\hat{n}_t\) are computed with Optical Flow and a Helmholz-Hodge Decomposition
- Realsense for Ground-Truth only
INTRODUCTION
- Each action: 1s trajectory towards the current guess
- Baseline (Random): Randomize approach direction
- EIG (Ours): Choose the approach to maximize EIG, sampling-based optimization with Gaussian Cross-Entropy Method
- Learning a physical model online can improve data efficiency, predictability, and reuse between tasks.
- Previous Tactile System Identification Work: Static Objects and/or Strong Shape Priors and/or 2D
- Learning: a violation-implicit loss function penalizes physical constraint violation while avoiding the numerical stiffness inherent in rigid-body contact.
- We learn cuboid and convex polyhedra with less than 10s of randomly collected data.
- Exploration: maximizing Expected Info Gain (EIG) leads to significantly faster learning.
Only tactile data is used to find the pose and geometry of an arbitrary dynamic convex object.
METHOD AND FRAMEWORK
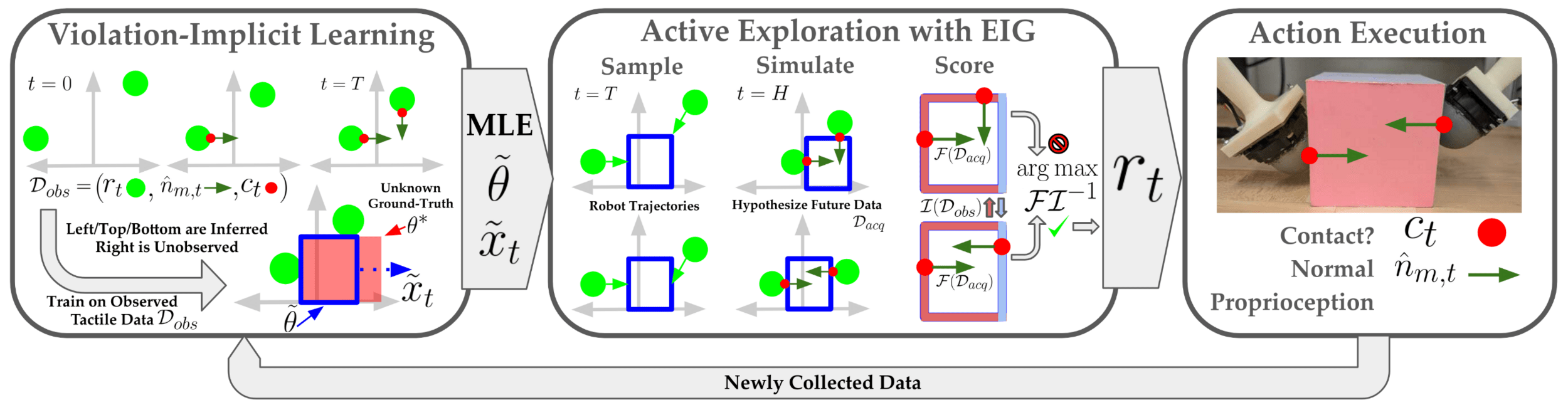
- Learning Difficulty: gradients of dynamics \(f\) are near-0 or near-\(\infty\), which is not amenable to learning.
- Solution: add inner optimization over contact forces \(\lambda\). Trade-off: solving a (fast) QP each gradient step for better gradients.
\(\sum_t \mathbb{P}(m_t | \theta, x_t) + ||x_t - f_\theta(x_{t-1}, \lambda)||^2\)
Where \(\lambda = \min g_\theta(x, \lambda)\)
\(\mathcal{L} = \sum_t \min_\lambda\mathbb{P}(m_t | \theta, x_t) + ||x_t - f_\theta(x_{t-1})||^2 + g_\theta(x, \lambda)\)
Physics Constrained MLE with Trajectory Optimization
Violation-Implicit Loss
- Observed Information: empirical variance of loss gradient
\(\mathcal{I} = \sum_{m_t} \nabla\mathcal{L}(\theta, x_T) \left(\nabla \mathcal{L}(\theta, x_T\right)^T\)
Measurements \(m_t\)
- Fisher Information: expected variance given future \(m_t\)
\(\mathcal{F} = \mathbb{E}_{m_t}\left[\nabla\mathcal{L}(\theta, x_T) \left(\nabla \mathcal{L}(\theta, x_T\right)^T\right]\)
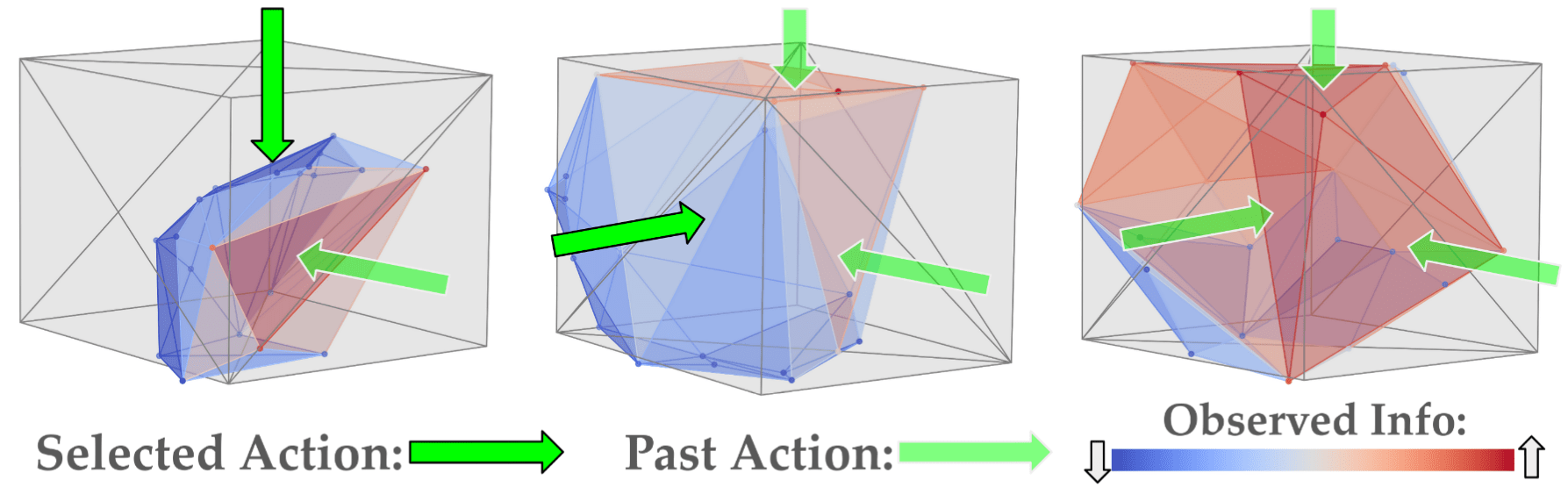
- Sample future actions, Simulate to estimate \(\mathcal{F}\), then maximize Expected Information Gain (EIG)
\(EIG := \log\det\left(\mathcal{F}\mathcal{I}^{-1} + \mathbf{I}\right)\)