Robot-Assisted Feeding with Tractable Online Learning
Ethan K. Gordon; PI: Siddhartha Srinivasa
Supported by: NSF (IIS 2007011; DMS 1839371; NRI 2132848; CHS 2007011; GRFP DGE-1762114)
ethan@ethankgordon.com
OBJECTIVE
Only tactile data is used to find the pose and geometry of an arbitrary dynamic convex object.
Project Website:
https://robotfeeding.io
MORE INFO


https://ethankgordon.com
ONLINE LEARNING FOR BITE ACQUISITION
COMMUNITY-BASED PARTICIPATORY SYSTEM DESIGN
"If I can have a robot do it... it would be me feeding me, and that would be a huge deal"
-Tyler Schrenk, 1985-2023

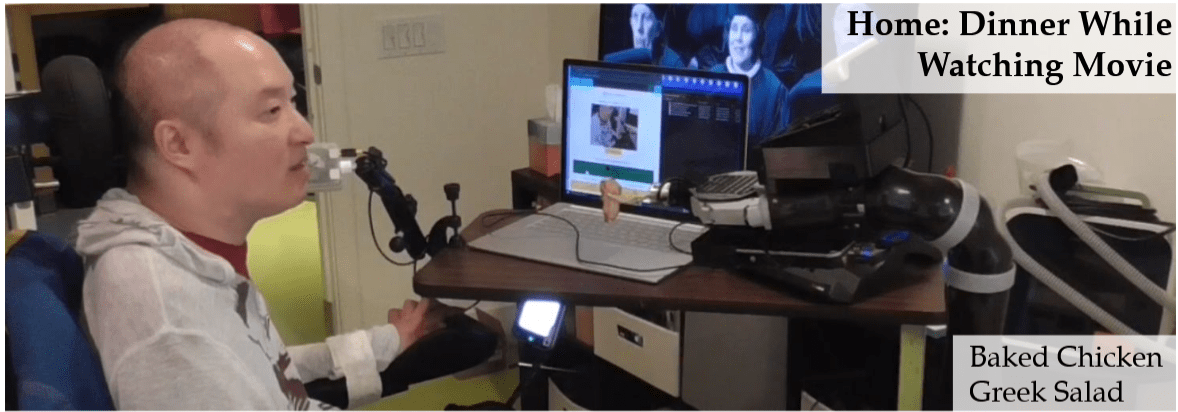
- Goal: develop a robot that can provide long-term feeding assistance to those with mobility limitations.
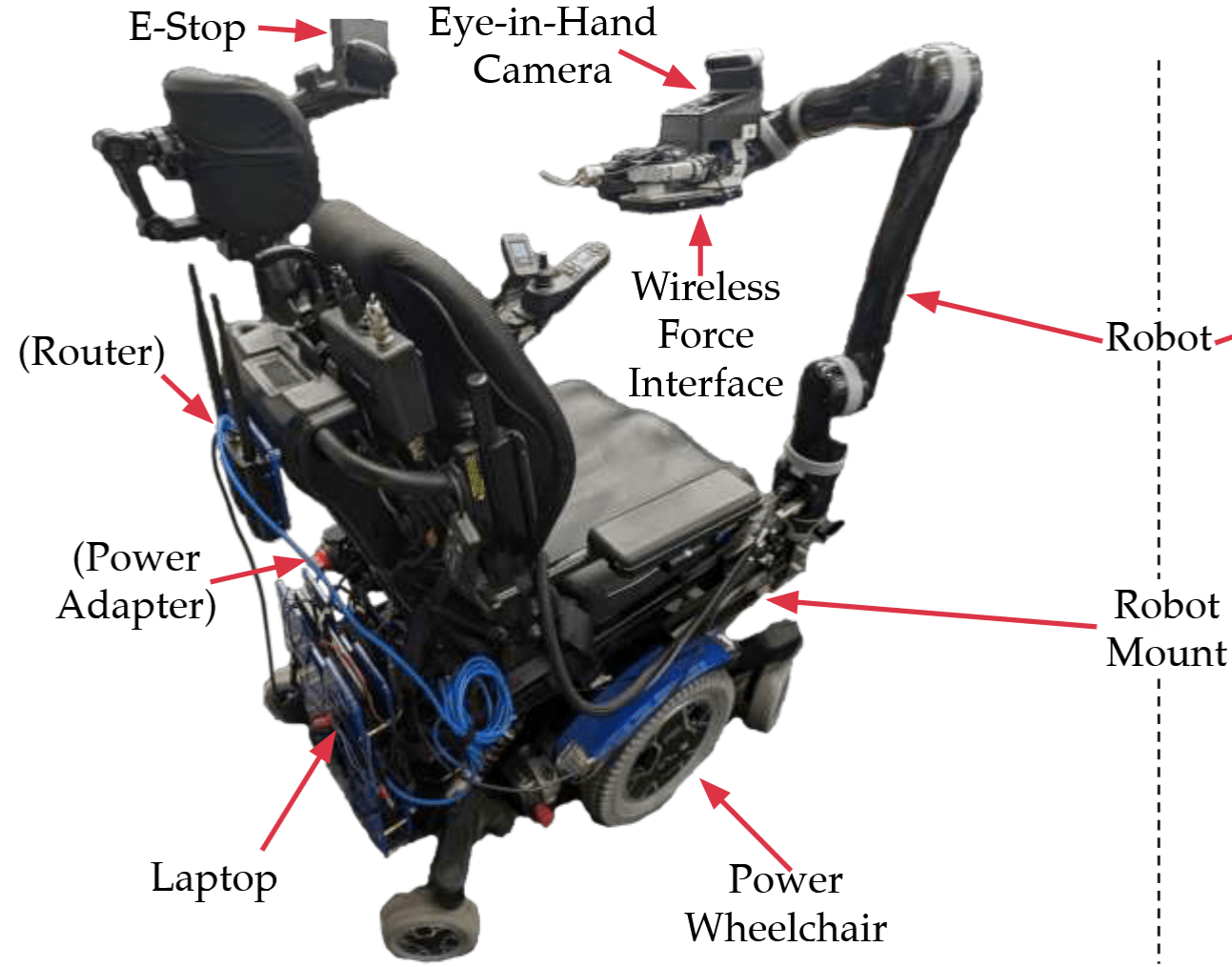
- Platform: modified, wheelchair-mounted Kinova JACO arm
Leverage user studies to define metrics and benchmarks.
- Example: users desired >80% success on food pickup
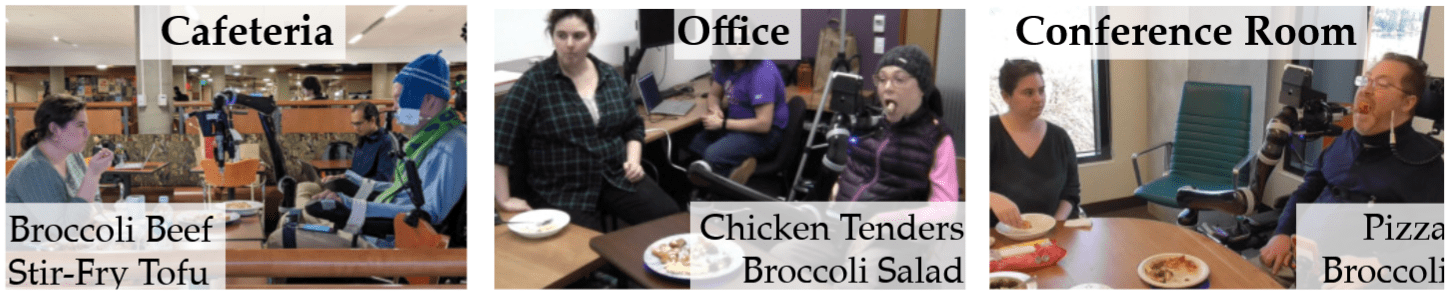
- Capture diversity: users had C1-C6 spinal cord injuries.
Leverage expert data for policy-space reduction and map onto an augmented contextual bandit setting.
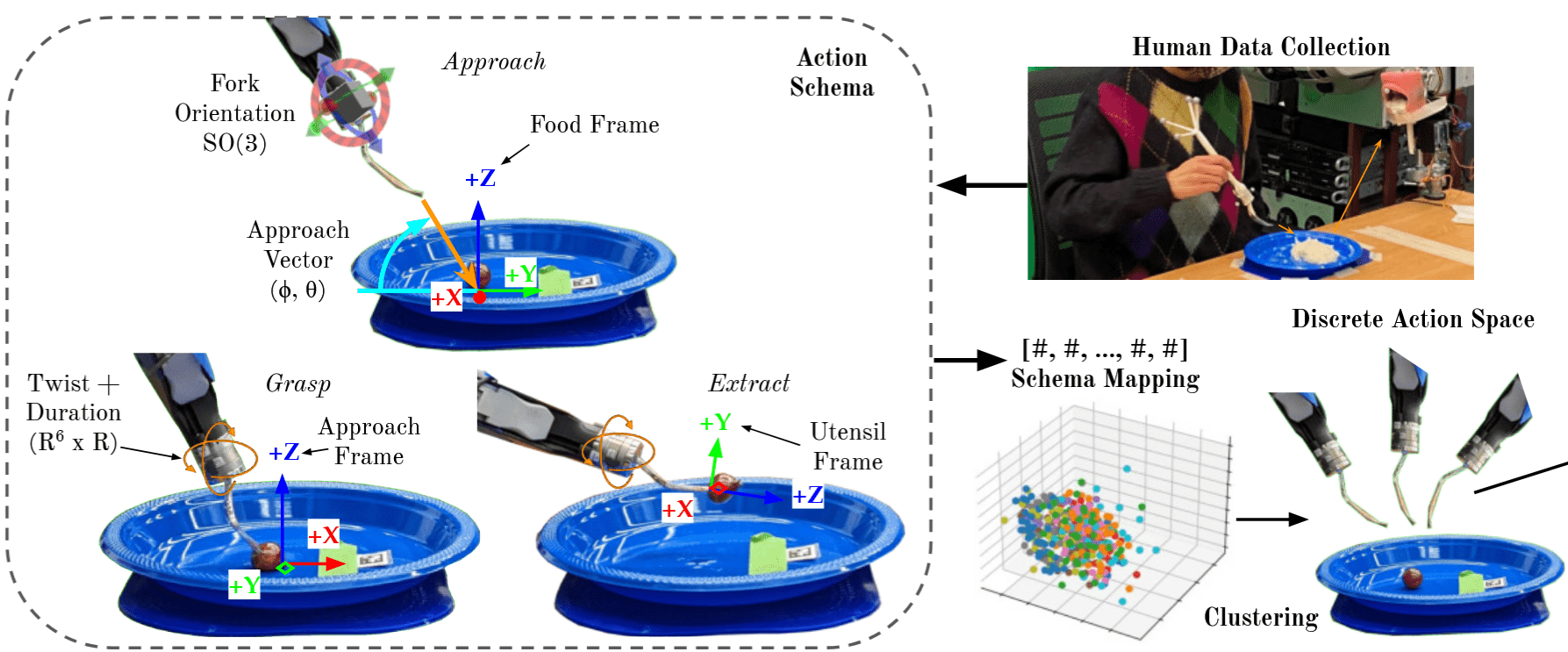
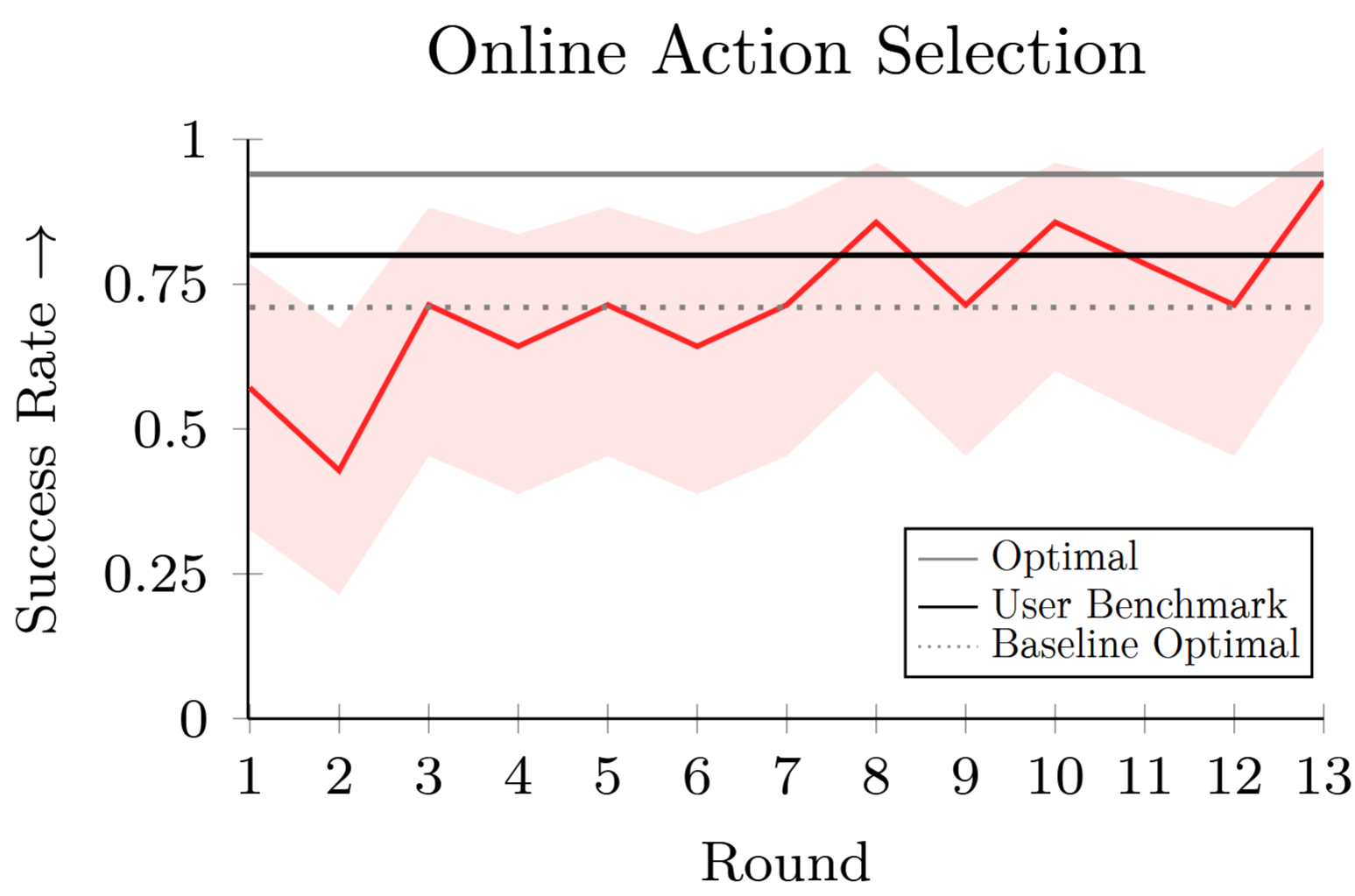
Reach 80% Success In ~8 Tries
- Map human food acquisition data onto a low-dimensional schema and cluster into a discrete set of control policies.
- Emergent policies: wiggling, high-pressure skewering, tilting, and scooping.
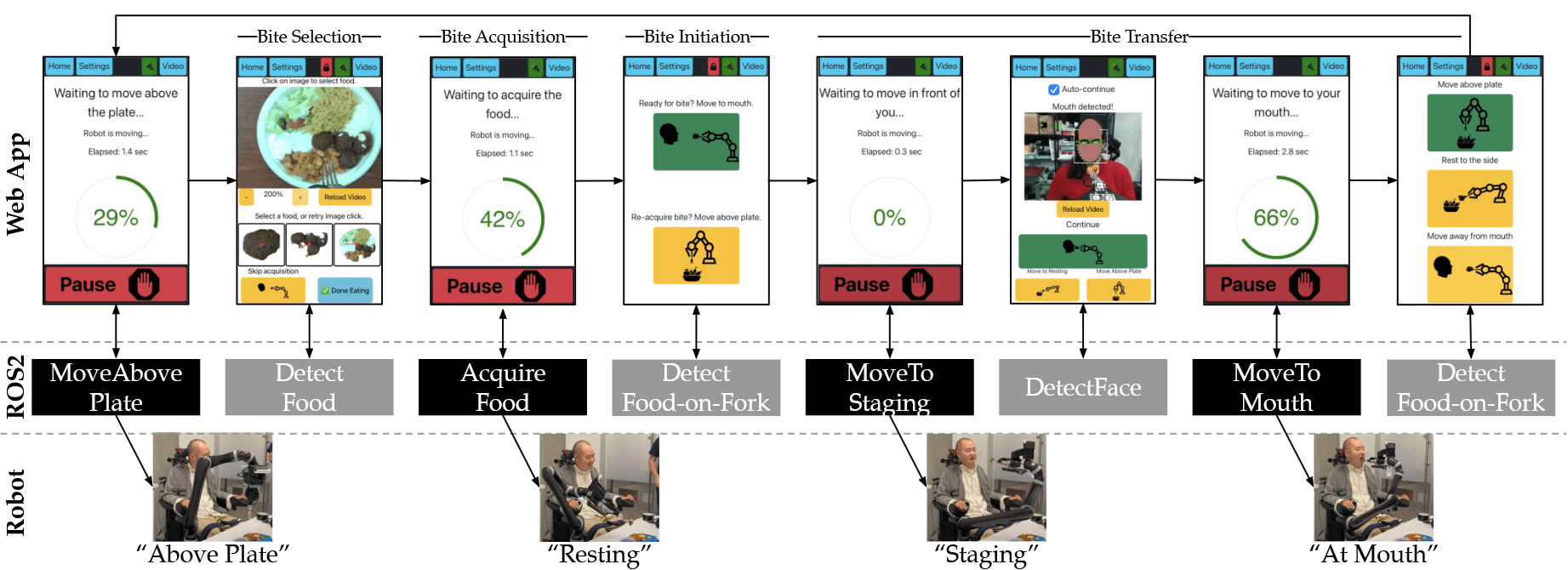
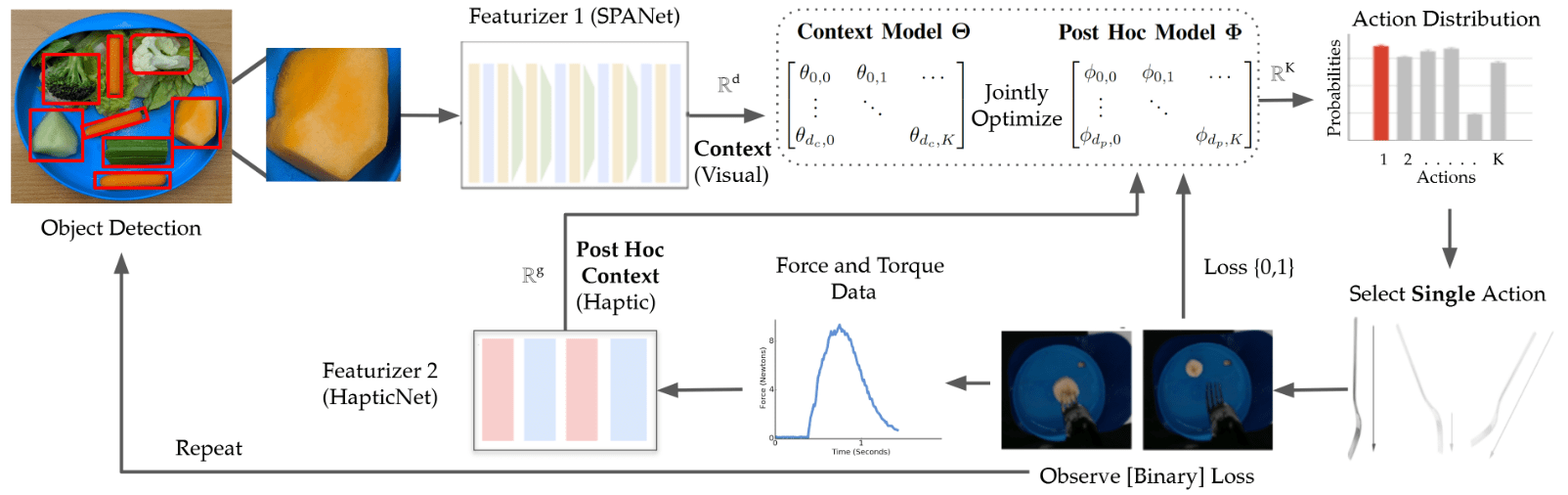
- At deployment time: use visual and post hoc haptic data to learn the best policy for new, never-before-seen food items.
Bring on community researchers (CR) as co-designers to create a system robust enough to be deployed in public and the home.
Tyler Schrenk
Jonathan Ko


Key System Goals:
- Portability: powered from wheelchair battery, no internet
- Safety: Watchdog monitoring force sensor at 120Hz and stopping for any anomaly
- Customization: Enable full control of the state machine within an accessible app
Weekly meetings with CRs ensured goals were met.