Lección 10: Sistemas LTI en el espacio de estados
BE3024 - Sistemas de Control 1 (Biomédica)
2do ciclo, 2024
Concluyendo nuestro repaso de conceptos matemáticos
x = [1; 2; 3]v = [-1, 0, 1, 2]w = [0.5, -8, 1]'x(2)x(1:2)x(end)x + wx' * wnorm(x, 2)A = [1, 0, -1; -2, 3, 0; 0, 0, -0.5]A(2, 3)A(:, 2:end)A'det(A)I = eye(3)zeros(2, 5)A^(-1)
I/A
inv(A)A * Ieig(A)syms x1 x2 x3
f(x1, x2, x3) = x1^2 + cos(x2) - exp(-x3)g = gradient(f)syms x1 x2 x3
f(x1, x2, x3) = [ 2*x1 - sin(x2) - exp(-x3);
x1^2 + cos(x2) - x3 ]Df = jacobian(f, [x1, x2, x3])syms t
A(t) = [t^2, cos(t); exp(-t), 1 / t]dAdt = diff(A)intA = int(A)¿Cómo obtenemos modelos en el espacio de estados?
Directamente desde el modelado
sys = ss(A, B, C, D)Directamente desde el modelado
vector de estado \(\mathbf{x}\in\mathbb{R}^n\)
vector de entrada \(\mathbf{u}\in\mathbb{R}^m\)
vector de salida \(\mathbf{y}\in\mathbb{R}^p\)
condición inicial
Directamente desde el modelado
matriz del sistema
\(\mathbf{A}\in\mathbb{R}^{n \times n}\)
términos feedforward
\(\mathbf{D}\in\mathbb{R}^{p \times m}\)
matriz de salida
\(\mathbf{C}\in\mathbb{R}^{p \times n}\)
matriz de control
\(\mathbf{B}\in\mathbb{R}^{n \times m}\)
Directamente desde el modelado
Sistema estrictamente propio
Directamente desde el modelado
Sistema SISO (Single-Input Single-Output)
Todo sistema que no es SISO se denomina MIMO (Multiple-Inputs Multiple-Outputs)
Ejemplo: sistemas mecánicos
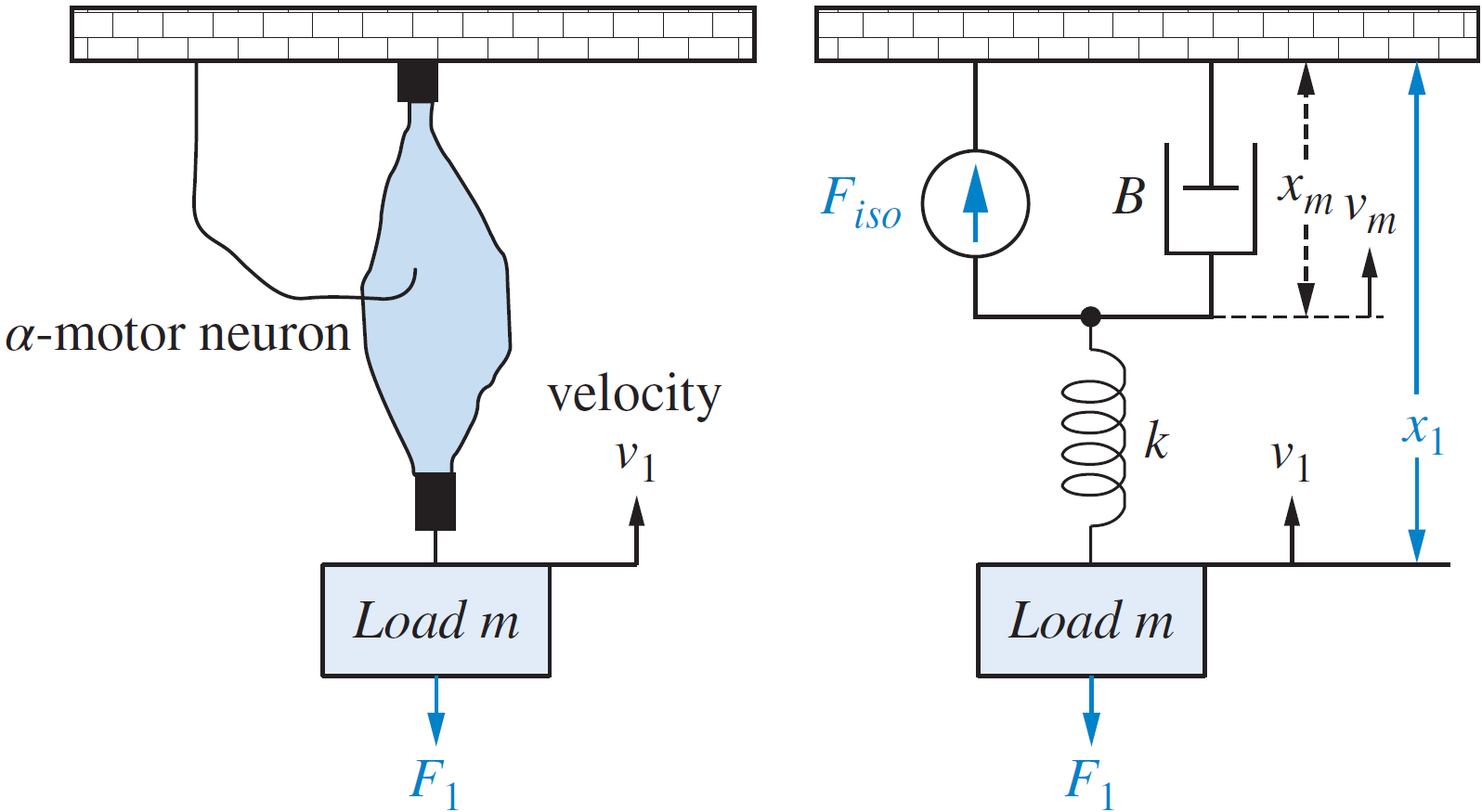
Para sistemas mecánicos, las variables de estado corresponden a las posiciones y velocidades.
Depende de qué es lo que podemos / queremos medir.
Depende de qué es lo que podemos / queremos medir.
¿Y la otra ecuación?
No hay \(\mathbf{D}\mathbf{u}\)
\(\Rightarrow \mathbf{D}=\mathbf{0}_{1\times2}\)
Ejemplo: circuitos eléctricos

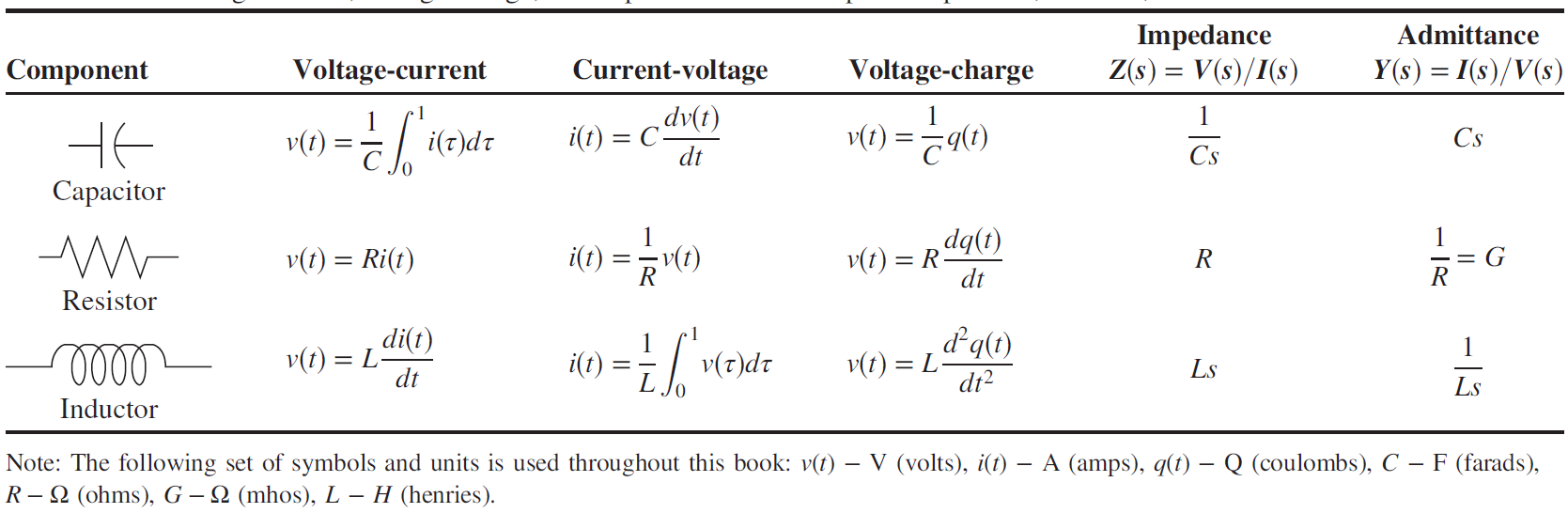
Para circuitos eléctricos, las variables de estado corresponden a los voltajes en los capacitores y a las corrientes en los inductores.
A partir de modelos clásicos
Si partimos de \(G(s)=\dfrac{Y(s)}{U(s)}\), encontrar el modelo en espacio de estados es tan simple como:
sys = ss(G)A partir de modelos clásicos
sys = ss(G)y aplican las mismas funciones de la Toolbox que antes.
Si partimos de \(G(s)=\dfrac{Y(s)}{U(s)}\), encontrar el modelo en espacio de estados es tan simple como:
A partir de modelos clásicos
si partimos de \(G(s)=\dfrac{Y(s)}{U(s)}\) encontrar el modelo en espacio de estados es tan simple como
sys = ss(G)y aplican las mismas funciones de la Toolbox que antes.
¿Pero qué es realmente lo que está ocurriendo?
veamos qué hay adentro...

Ejemplo: diagramas de bloques
Ejemplo: diagramas de bloques

Ejemplo: diagramas de bloques
las salidas de los integradores conforman al estado \(\mathbf{x}\)
Algunas observaciones fundamentales
G = tf(1, [1, -2, -5, -6]);
sys = ss(G)
del ejemplo anterior
"a mano"
del ejemplo anterior
"a mano"
¿Cuál es el modelo correcto?
del ejemplo anterior
"a mano"
¿Cuál es el modelo correcto?
¡Ambos! Son distintas realizaciones del mismo sistema.
Dos sistemas son equivalentes si producen la misma función de transferencia.
sys = ss(A, B, C, D);
G = tf(sys)Polos y estabilidad
sys = ss(A, B, C, D);
pole(sys)
Resulta que
luego de lo cual aplican los mismos* criterios que en control clásico.
mismos*, aunque podemos ser más específicos:
Marginalmente/críticamente estable requiere que los polos con \(\mathrm{Re}(\lambda)=0\) tengan multiplicidad algebráica unitaria.
Para este caso también \(\displaystyle\lim_{t\to\infty} \mathbf{x}(t) \in \mathcal{N}\left(\mathbf{A}\right)\).