Coordenadas anatómicas e introducción a la navegación quirúrgica
BE3027 - Robótica Médica

¿Qué tenemos hasta ahora?
Import and Spatial Referencing
Display, Volume Rendering, and Surfaces
Preprocessing and Augmentation
GroundTruth Labeling and Segmentation
Adquisición y reconstrucción
Análisis y/o aplicación
un poco de esto
(aunque faltan más detalles)
Import and Spatial Referencing
Display, Volume Rendering, and Surfaces
Adquisición y reconstrucción
un poco de esto
(aunque faltan más detalles)
Preprocessing and Augmentation
GroundTruth Labeling and Segmentation
Análisis y/o aplicación
nos enfocaremos primero en estos
DICOM
NifTI
NRRD
Analyze
Minc
Adquisición, almacenamiento, intercambio y transmisión
Digital Imaging and Communications in Medicine (DICOM)
tutorial para trabajar con DICOM en 3D Slicer
https://spujol.github.io/SlicerDICOMTutorial/3DSlicer_DICOMTutorial_SoniaPujol.pdf
Interpretando la información espacial

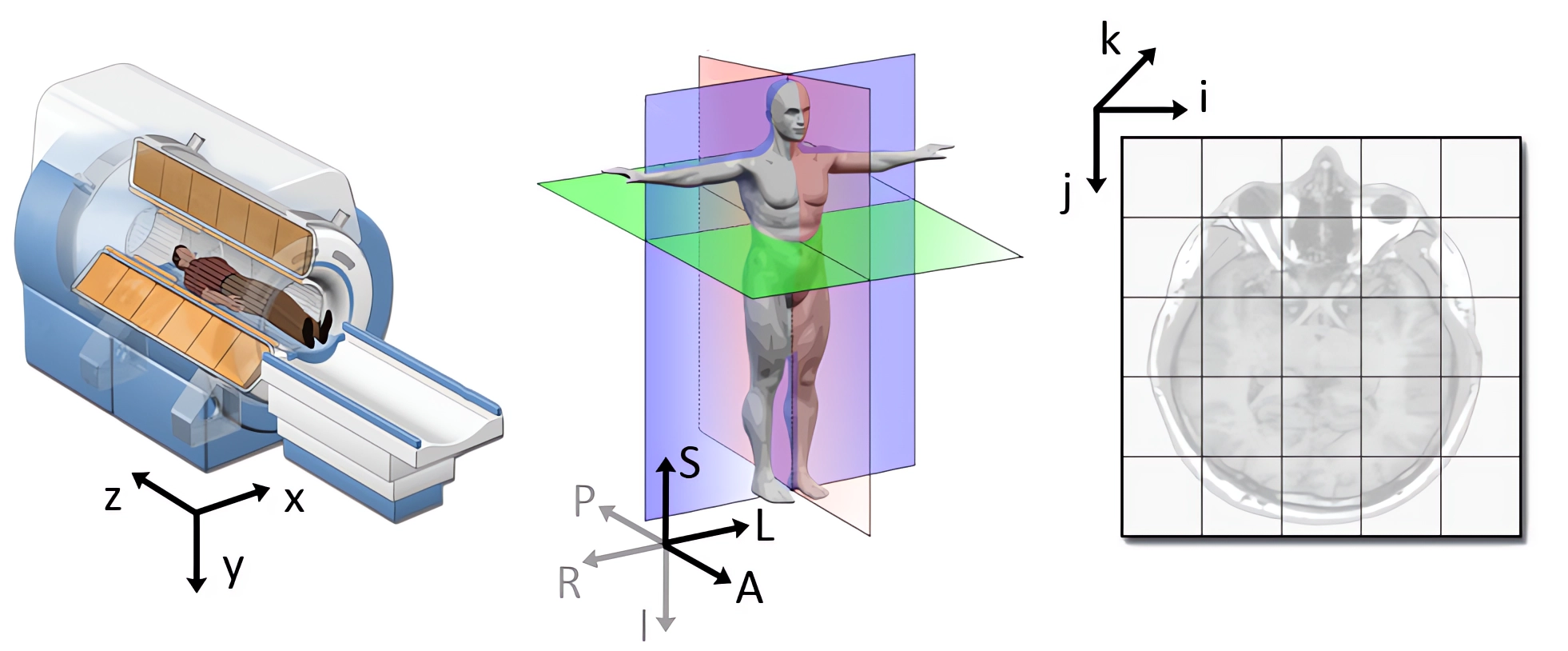
coordenadas del mundo (inerciales) [m]
coordenadas anatómicas (del paciente) [mm]
coordenadas intrínsecas (de imagen) [px] | [voxel]
la selección del origen es arbitraria, aunque típicamente se coloca en el centro de rotación (COR) del sistema pero depende del fabricante
coordenadas del mundo (inerciales) [m]
coordenadas anatómicas (del paciente) [mm]
coordenadas intrínsecas (de imagen) [px] | [voxel]
dos convenciones:
LPS (Left, Posterior, Superior)
RAS (Right, Anterior, Superior)
sagital
coronal
transversal
sagital
coronal
transversal

convención RAS
- NifTI
- General Electric
- 3D Slicer

convención LPS
- DICOM
- Siemens y el resto
- MATLAB
sagital
coronal
transversal
convención RAS
- NifTI
- General Electric
- 3D Slicer
convención LPS
- DICOM
- Siemens y el resto
- MATLAB
coordenadas del mundo (inerciales) [m]
coordenadas anatómicas (del paciente) [mm]
coordenadas intrínsecas (de imagen) [px] | [voxel]
coordenadas del mundo (inerciales) [m]
coordenadas anatómicas (del paciente) [mm]
coordenadas intrínsecas (de imagen) [px] | [voxel]
De coordenadas intrínsecas a anatómicas
De coordenadas intrínsecas a anatómicas
rotación
traslación
escalamiento
transformación afín
puede añadirse también un shear
De coordenadas intrínsecas a anatómicas
puede añadirse también un shear
rotación
traslación
escalamiento
transformación afín

De coordenadas intrínsecas a anatómicas
De coordenadas intrínsecas a anatómicas
debe calcularse para DICOM aunque puede extraerse directamente en NifTI
De coordenadas intrínsecas a anatómicas
De coordenadas intrínsecas a anatómicas
De coordenadas intrínsecas a anatómicas
De coordenadas intrínsecas a anatómicas
ya con esto extraemos información anatómica de los voxeles y vemos la posibilidad de enlazarla con sistemas de navegación y/o robóticos
Anclando a sistemas de navegación

Anclando a sistemas de navegación
Anclando a sistemas de navegación
¿Cómo puede encontrarse esto? mediante un proceso de registro (rígido) empleando algún tipo de puntos característicos como:
- anatomical landmarks
- fiducial markers
Registro

Registro


Anatomical landmarks


Fiducial markers (genéricos)


Fiducial markers (médicos)


Fiducial markers (médicos)
