Cinemática de cuerpos rígidos
BE3027 - Robótica Médica

¿Por qué?
¿Qué es la transformación homogénea?
matriz de rotación
orientación de \(\{B\}\) con respecto a \(\{I\}\)
vectores de los ejes de coordenadas para \(\{B\}\)
vector de traslación
posición de \(\{B\}\) con respecto a \(\{I\}\)
coordenadas del origen de \(\{B\}\)
ajuste por coordenadas homogéneas
¿Coordenadas homogéneas?
¿Coordenadas homogéneas?
vectores en coordenadas homogéneas
Las matrices de rotación junto con la multiplicación de matrices forman el grupo especial ortogonal
caso 2D
caso 3D
multiplicación entre rotaciones produce rotaciones
son matrices ortogonales
Las matrices de transformación homogénea junto con la multiplicación de matrices forman el grupo especial euclideano
caso 2D
caso 3D
multiplicación entre transformaciones produce transformaciones
NO son matrices ortogonales
Cinemática de cuerpos rígidos en 2D
3 grados de libertad
IT_B = [ cos(theta), -sin(theta), x;
sin(theta), cos(theta), y;
0, 0, 1 ];
IT_B = transl2(x, y) * trot2(theta); % Robotics Toolbox
Ejemplo
Suponga que un sensor de distancia instalado en un vehículo detecta una señal de tránsito en la posición \(\begin{bmatrix} 1 & 3 \end{bmatrix}^\top\). Este vehículo se encuentra en la posición \(\begin{bmatrix} 2 & 0 \end{bmatrix}^\top\) en el marco inercial (o global) con una orientación de \(\pi/3\). ¿Cuáles son las coordenadas globales de la señal de tránsito?
>> be3027_clase2_vehiculo2d.mlx
Cinemática de cuerpos rígidos en 3D
extensión lógica al caso 3D
extensión lógica al caso 3D
ya NO tiene interpretación (única)
extensión lógica al caso 3D
ya NO tiene interpretación (única)
próxima clase
Aún cuando no podamos interpretar la rotación, podemos generar la transformación mediante transformaciones (activas) elementales
Tx = transl(a, 0, 0)Traslación en \(x\)
Ty = transl(0, a, 0)Traslación en \(y\)
Tz = transl(0, 0, a)Traslación en \(z\)
Trx = trotx(theta)Rotación en \(x\)
Try = troty(theta)Rotación en \(y\)
Trz = trotz(theta)Rotación en \(z\)
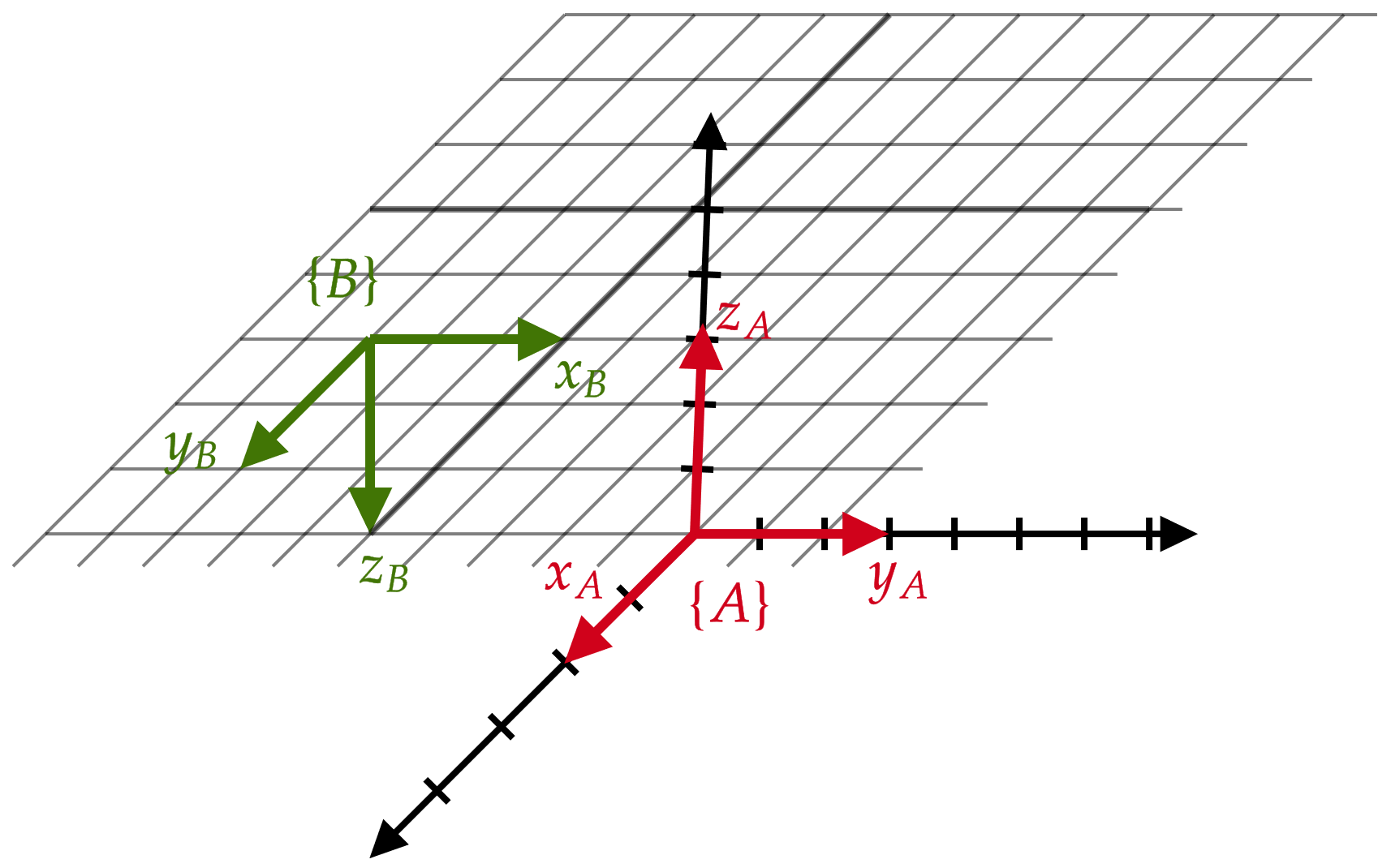
¿Cuál es la pose de \(\{B\}\) con respecto de \(\{A\}\)?
>> be3027_clase2_transformaciones.m