Robótica médica y cirugía asistida por computadora
BE3027 - Robótica Médica

¿Qué tenemos hasta ahora?
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
podemos hacer que el robot ejecute (cinemáticamente hablando) la tarea que necesitemos
dependerá de la aplicación
en nuestro caso...



Recordemos: tareas 4A
automation
autonomy
augmentation
assistance
robótica médica
Cirugía (robótica) asistida por computadora
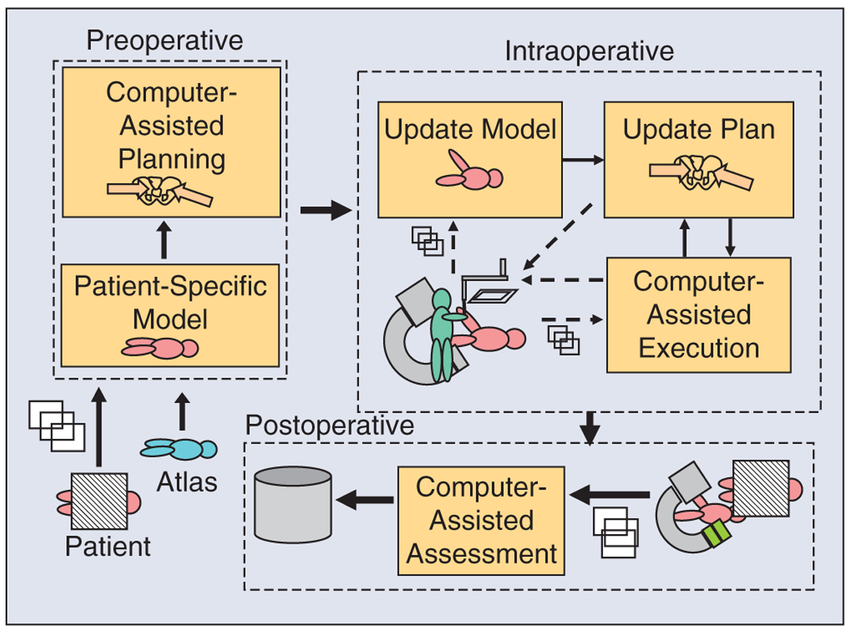
principalmente basadas en imágenes médicas
combinación de imágenes médicas con navegación y registro
Navegación


Navegación
Registro


aquí se da el principal/mayor aporte del robot
¿Qué tanto asiste el robot al cirujano? Depende del paradigma de control
Movimiento semi-autónomo
Movimiento pre-programado de forma interactiva por el cirujano, basado en imágenes médicas. Ej: inserción de agujas o instrumentos, trayectorias de herramientas de corte.

Movimiento semi-autónomo
Control teleoperado

El robot en el lado del paciente replica los movimientos registrados por la interfaz para el cirujano.
Hands-on compliant control
El cirujano recibe retroalimentación sobre la fuerza ejercida en el efector final del robot y viceversa.

Estos paradigmas no son mutuamente excluyentes ya que frecuentemente se usa una mezcla de los mismos.

Cirujano vs robot
Potencial de impacto
