Técnicas clásicas de visión por computadora I
MT3006 - Robótica 2
¿Por qué?
Procesamiento a nivel pixel
Thresholding

imagen binaria
(forma una máscara)
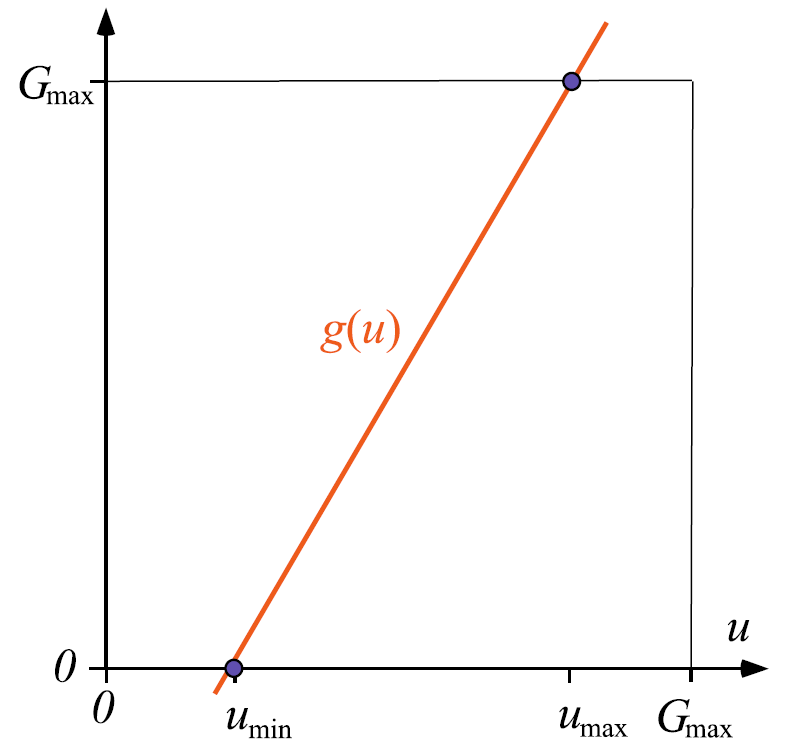
Thresholding
threshold
Thresholding
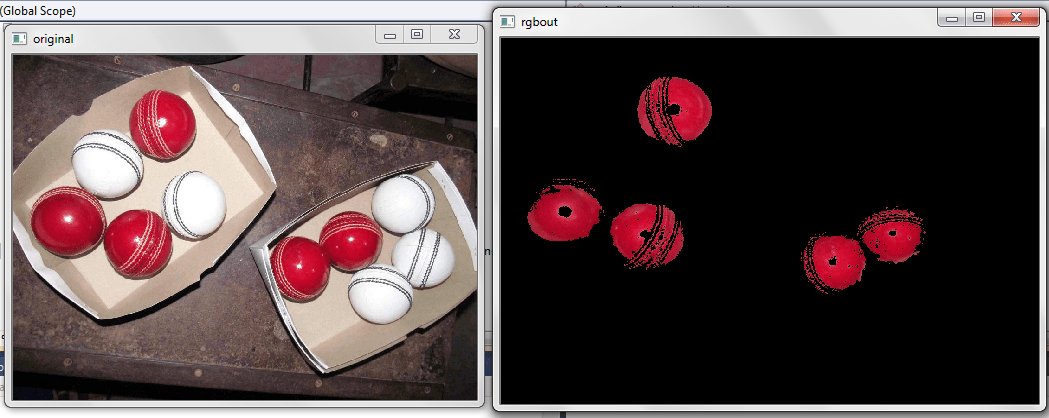
imagen luego de aplicar la máscara de color
Thresholding
imagen luego de aplicar la máscara de color
Thresholding
o bien (por ejemplo)
Thresholding
o bien (por ejemplo)
color de interés

Histogramas

Equalización de histograma

Equalización de histograma
Procesamiento a nivel local
Estadísticas básicas

también aplican a nivel global
Filtrado LTI \(\equiv\) Convolución

Filtrado LTI \(\equiv\) Convolución
kernel de \((2k+1)\times(2k+1)\)
factor de escalamiento tal que \(\displaystyle \sum_i \sum_j |w_{ij}|=S\)
Filtrado LTI \(\equiv\) Convolución
kernel de \((2k+1)\times(2k+1)\)
factor de escalamiento tal que \(\displaystyle \sum_i \sum_j |w_{ij}|=S\)
si el kernel es simétrico entonces
correlación cruzada en 2D
Procedimiento
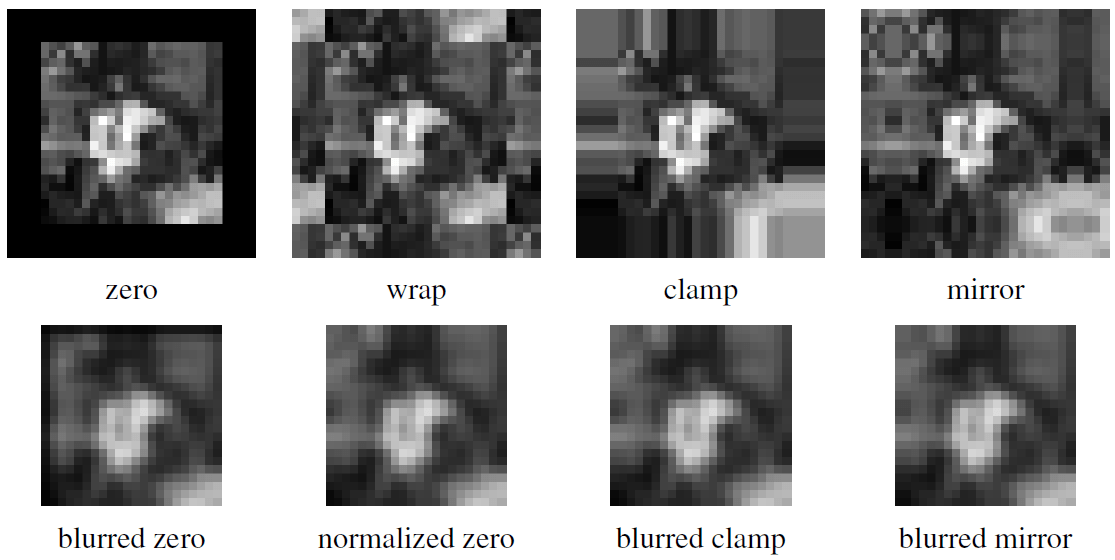
Padding (efectos en los bordes)
Convolución vs correlación
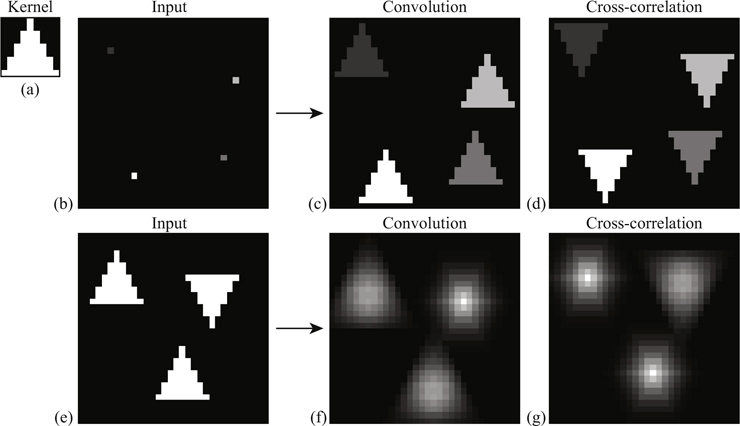
Convolución vs correlación
puede emplearse (normalizada) para hacer template matching
Kernels para suavizado (smoothing)
box filter

ej: \(3\times 3\)
\(S=9\) en este caso
Kernels para suavizado (smoothing)
Gaussian filter
bajo esta perspectiva el box filter corresponde a una distribución uniforme, también pueden emplearse otras distribuciones como la binomial
Aplicaciones de suavizado
de-noising


remoción de detalles
\(\Rightarrow\) suavizado \(\equiv\) filtrado pasa-bajas
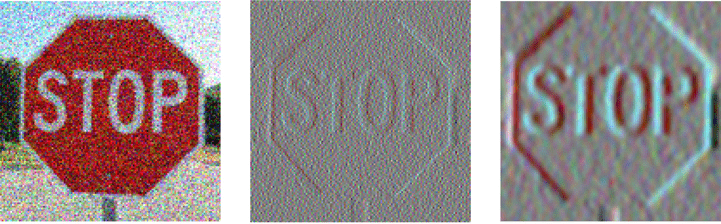
Afilado (sharpening)
operación contraria al suavizado
\(\equiv\) filtrado pasa-altas \(\approx\) resaltado de detalles

sharpen filter (ejemplo)
puede emplearse suavizado para obtener afilado mediante unsharp masking
factor de escalamiento
versión suavizada de \(I\)
residual:
De detalles a bordes
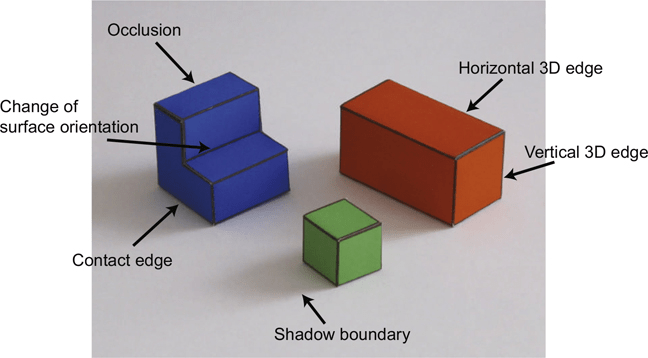

perfiles de intensidad
De detalles a bordes
perfiles de intensidad
discontinuidades \(\Rightarrow\) bordes
entonces pueden emplearse derivadas para detectarlos

gradiente
Laplaciano
Kernels para calcular derivadas
en imágenes el \(\delta\) más pequeño es 1, es decir, un pixel
Kernels para calcular derivadas
en imágenes el \(\delta\) más pequeño es 1, es decir, un pixel
kernels de Roberts
Derivadas y ruido
Roberts
Suavizado + Roberts
\(\Rightarrow\) Sobel
Kernels para calcular derivadas
kernels de Sobel
= derivada con \(\delta=2\) + suavizado con binomial
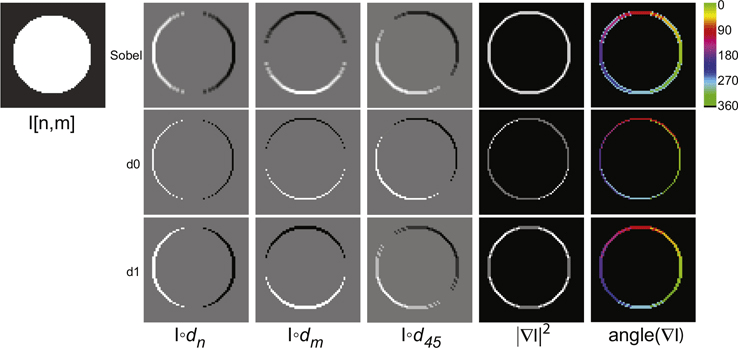
simple y decente, pero con bordes "de más" con diferente intensidad
¿Ideal? Imagen binaria sólo con los bordes más fuertes y con un grosor uniforme \(\Rightarrow\) detector de bordes de Canny
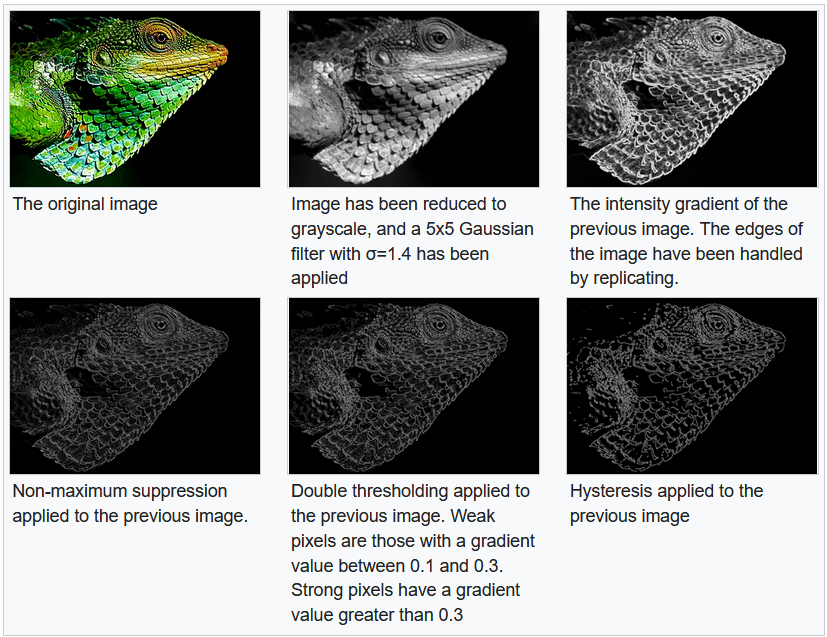
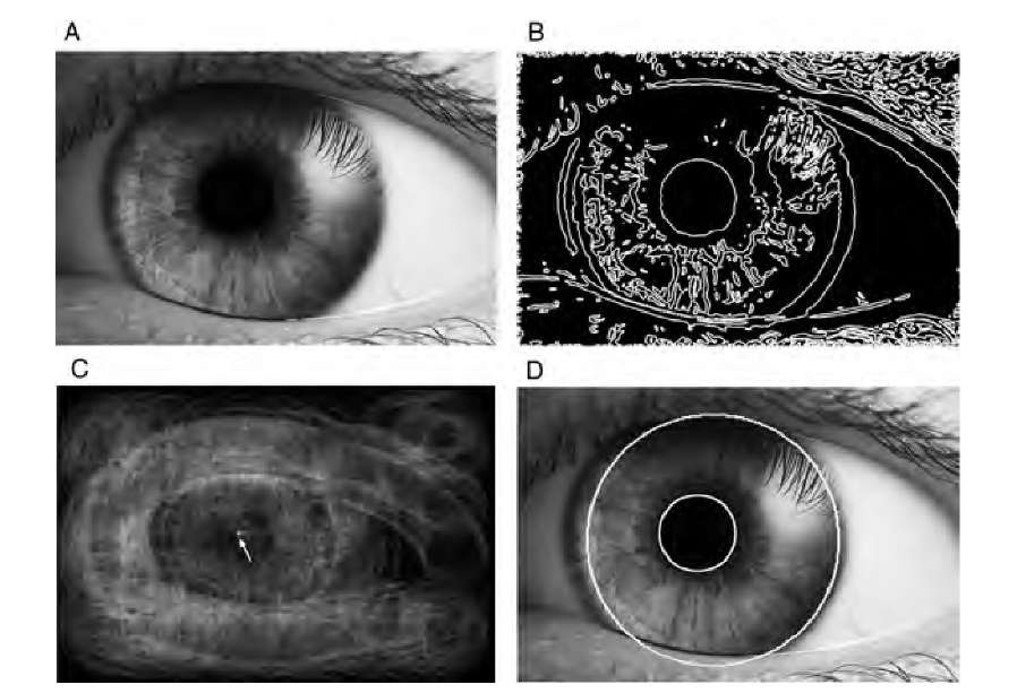
Canny edge detection

Canny edge detection
- Estimación del gradiente de la imagen.
- Se calcula la magnitud y la fase por pixel.
- La fase se aproxima | cuantifica a múltiplos de \(\pi/4\).
- Se realiza una supresión (local) de no-máximos para la magnitud, en la dirección de la fase.
- Se realiza una etapa de seguimiento de borde mediante thresholding e histéresis.
Canny edge detection
- Estimación del gradiente de la imagen.
- Se calcula la magnitud y la fase por pixel.
- La fase se aproxima | cuantifica a múltiplos de \(\pi/4\).
- Se realiza una supresión (local) de no-máximos para la magnitud, en la dirección de la fase.
- Se realiza una etapa de seguimiento de borde mediante thresholding e histéresis.
a pesar de haber detectores de bordes más modernos, el de Canny continúa siendo de los más útlies
Análisis de regiones y extracción (simple) de características
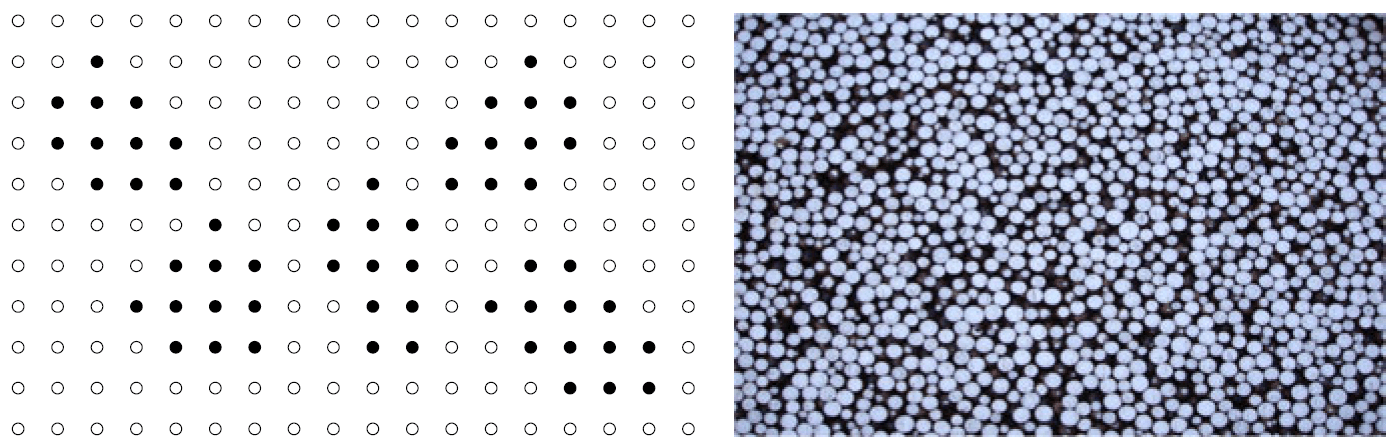
Análisis de regiones
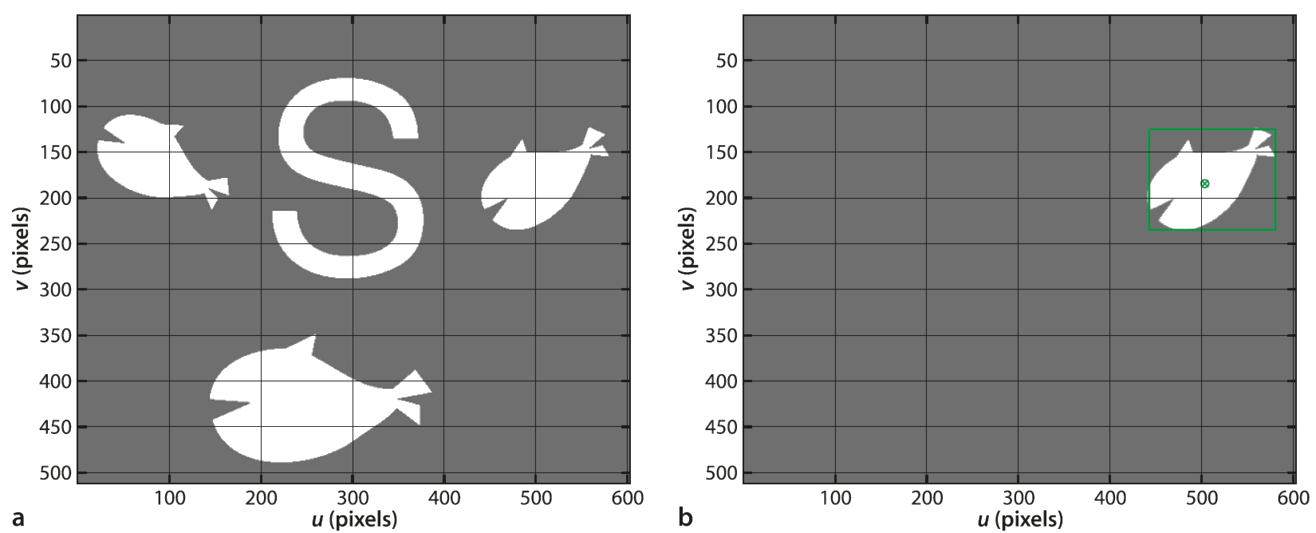
Análisis de regiones
imagen binaria
regiones
conformadas por conjuntos máximos de pixeles conectados
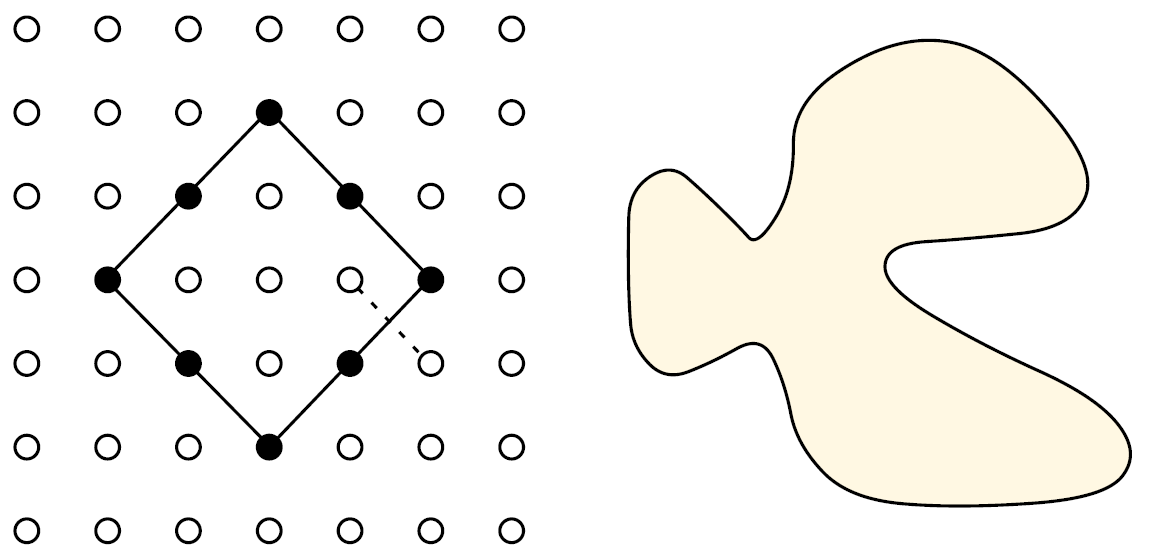
Conectividad y adyacencia
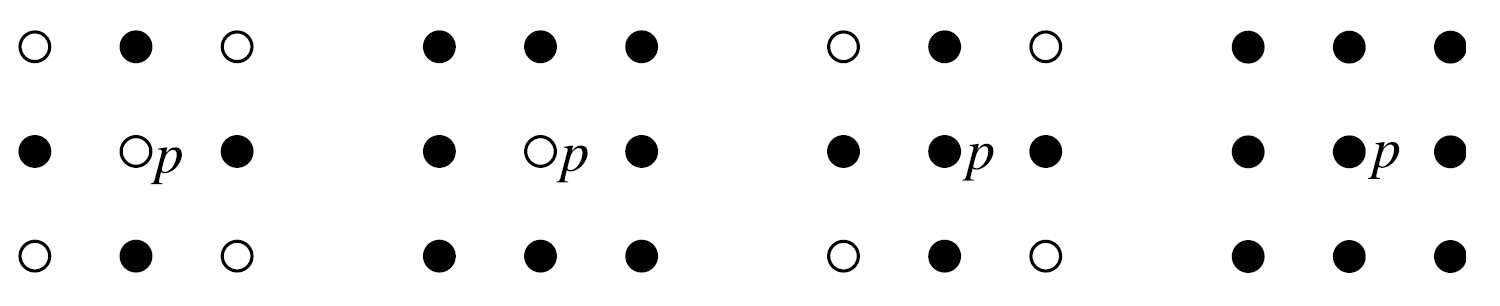
Conectividad y adyacencia
conjuntos de adyacencia
vecindarios
Conectividad y adyacencia
conjuntos de adyacencia
vecindarios
- El número de regiones puede cambiar dependiendo del tipo de conectividad considerada.
-
La topología de las regiones algunas veces no tiene "sentido" Euclideano.
Conteo según conectividad
Topología "extraña"


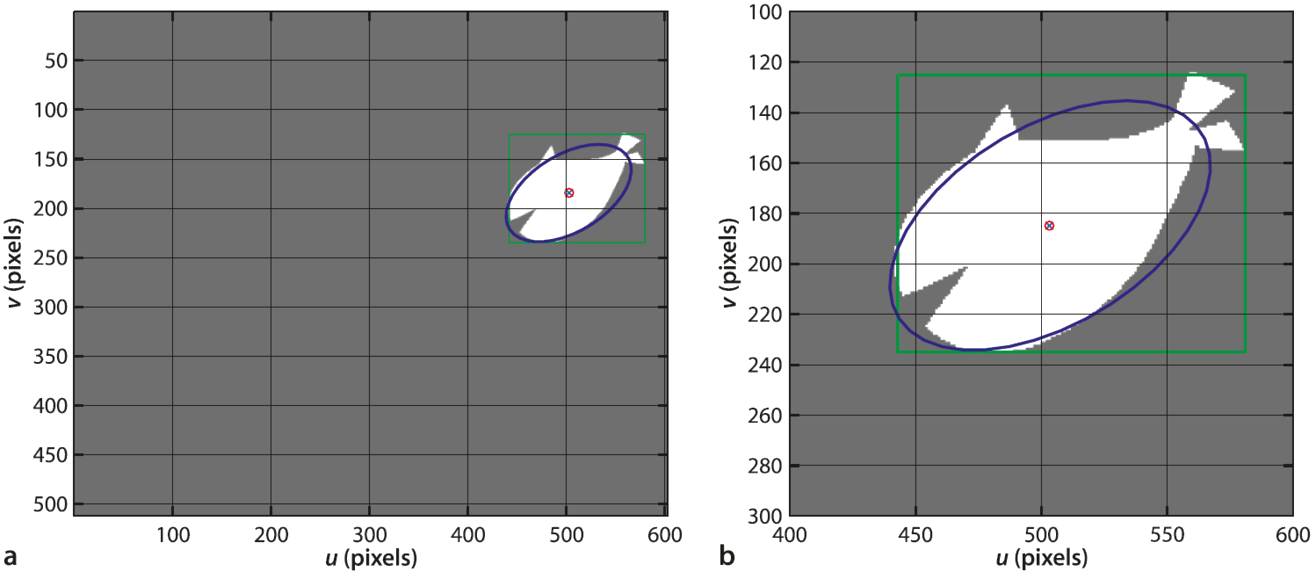
Análisis empleando momentos
Detección de líneas y círculos

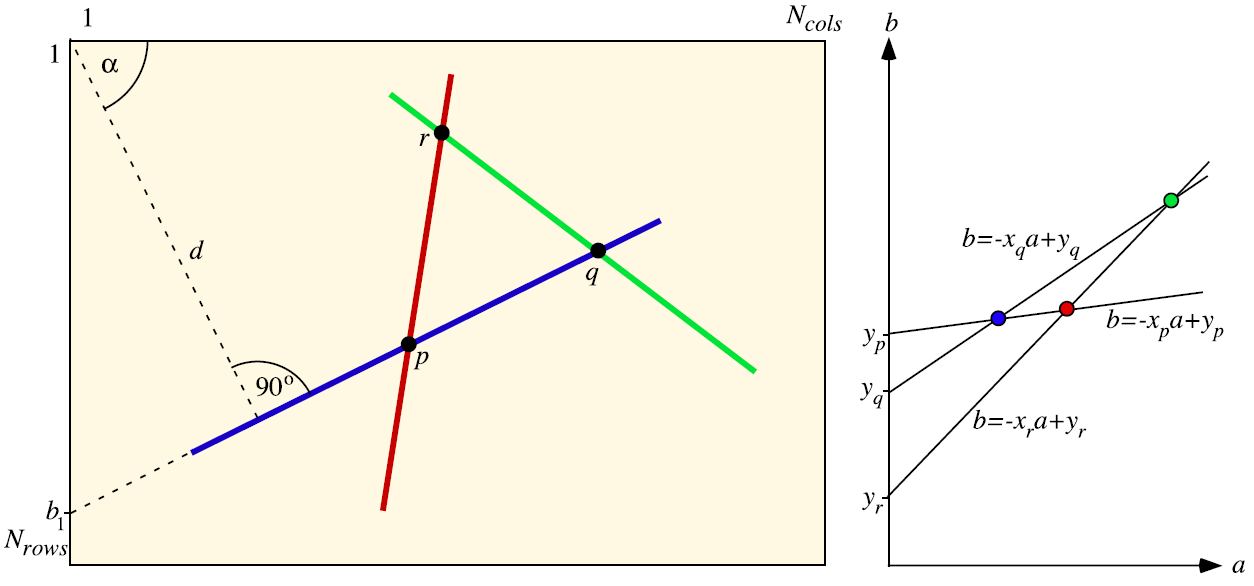
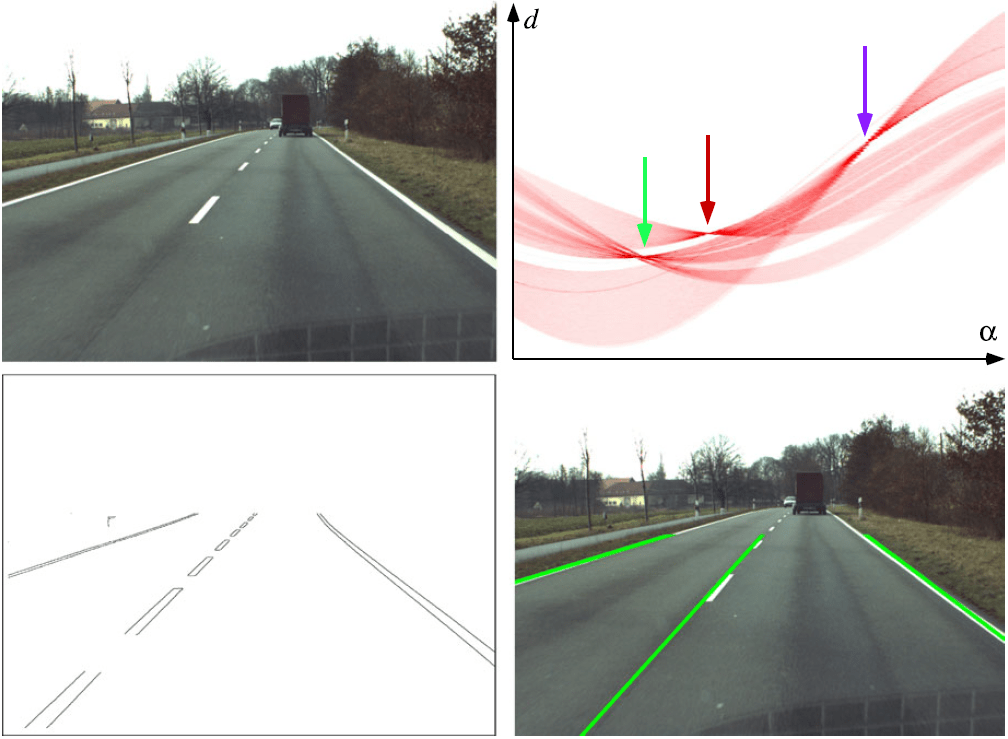
Transformada de Hough
Transformada de Hough para líneas
Segmentación


Referencias
- A. Torralba et al., Foundations of Computer Vision, bloques IV y V.
- R. Klette, Concise Computer Vision, capítulos 2, 3 y 5.
Detector de esquinas de Harris
