These slides:
https://s.ntnu.no/irobot
F for fullscreen
SPACE to advance
ESC to zoom out
Slides progress downward,
then to next column
Single-View 3D Shape Completion
for Robotic Grasping of Objects
via Deep Neural Fields
A MsC by
Peder Bergebakken Sundt
Motivation

Motivation
?
Panda Emika 7-DoF robot arm
With
Intel Realsense 3D vision

Single-View 3D Shape Completion
for Robotic Grasping of Objects
via Deep Neural Fields
A MsC by
Peder Bergebakken Sundt
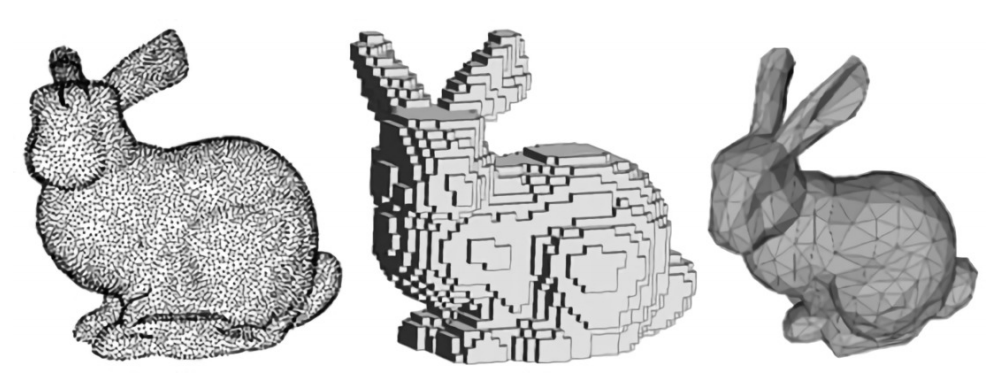
Affected by
point order,
no topology.
Scales poorly
Either limited
topologically or
self-intersecting
... all map poorly to neural networks!
Explicit 3D shape representations
Points
Voxels
Meshes
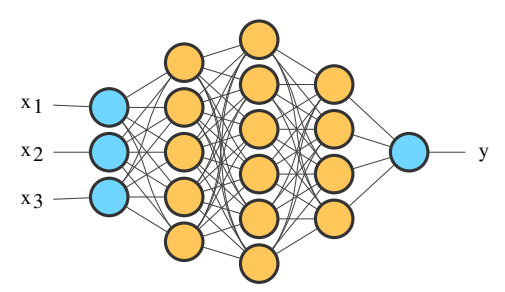
A new concept, first explored in 2019
"We have many names for the things we love:"
- [Deep] Neural Fields
- Coordinate-based Neural Networks
- Implicit Representation Network
Park JJ, Florence P, Straub J, Newcombe R, Lovegrove S. DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA: IEEE; 2019, p. 165–74. https://doi.org/10.1109/CVPR.2019.00025.
"We have many names for the things we love:"
- [Deep] Neural Fields
- Coordinate-based Neural Networks
- Implicit Representation Network
Park JJ, Florence P, Straub J, Newcombe R, Lovegrove S. DeepSDF: Learning Continuous Signed Distance Functions for Shape Representation. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA: IEEE; 2019, p. 165–74. https://doi.org/10.1109/CVPR.2019.00025.
A new concept, first explored in 2019
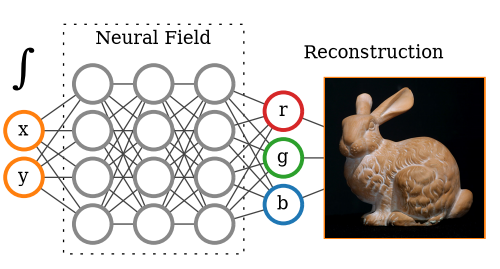
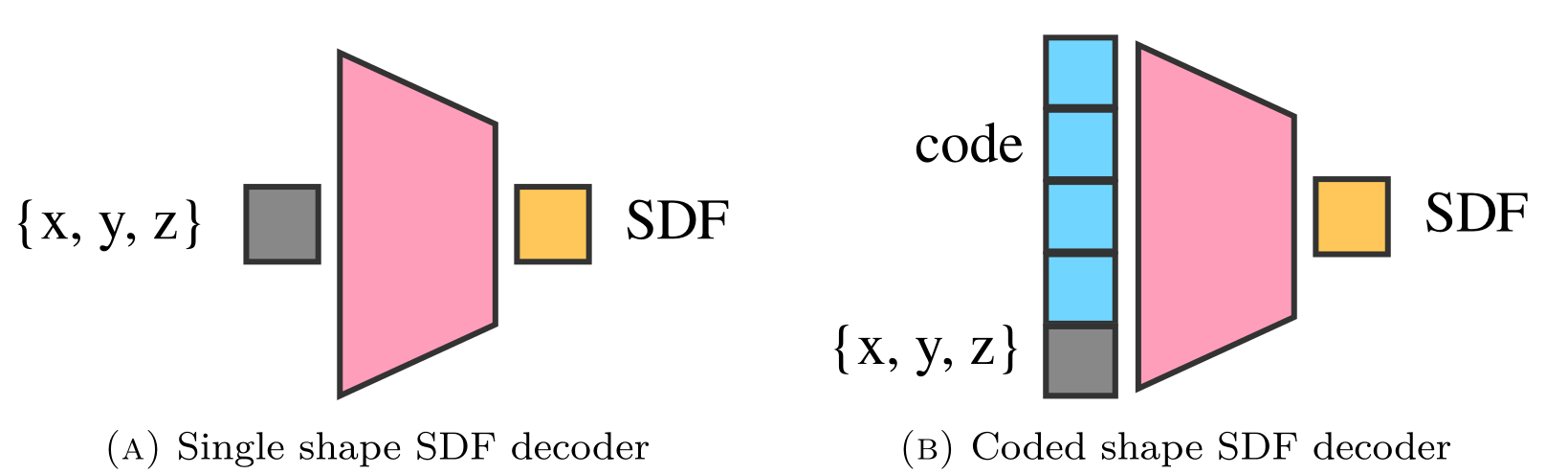
Query
coordinates
Value at
coordinate
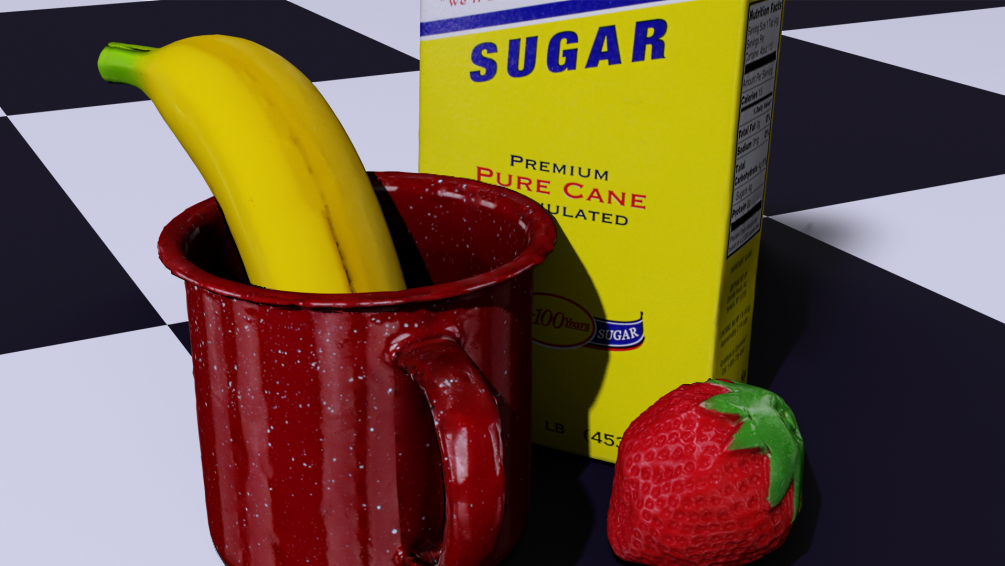
An example:
2D RGB Field
Trained on (x,y,r,g,b) tuples
3D Implicit Neural Representations have
several benefits:
- They represent shapes as continuous functions.
- Continuous -> arbitrary reconstruction resolution
- Perfect for partial data, enables single view shape completion
- The network size not tied to the resolution of 3D models.
- Networks only scale with shape complexity, not size!
- Seamlessly allow for learning latent spaces of functions.
- Enables shape completion drawing from learned priors.
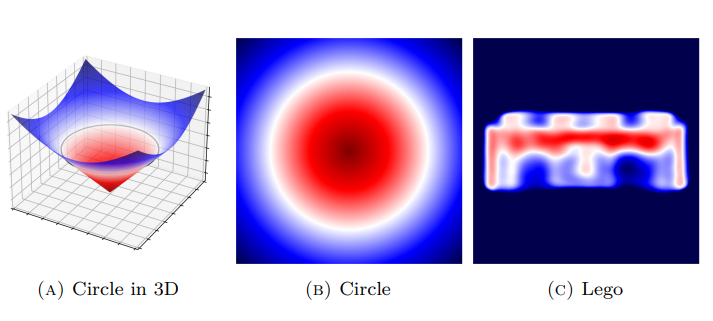
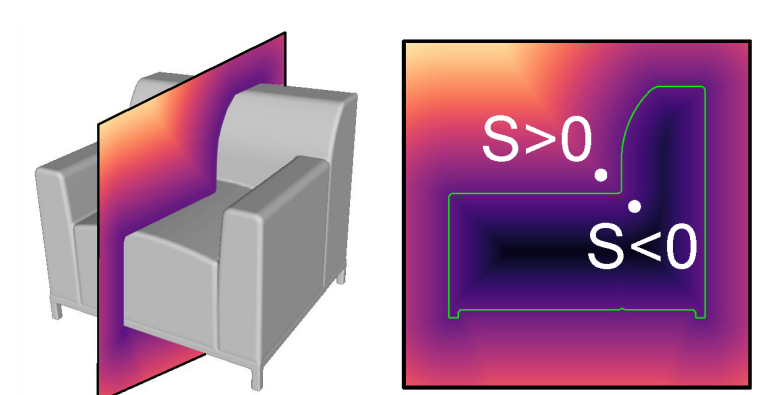
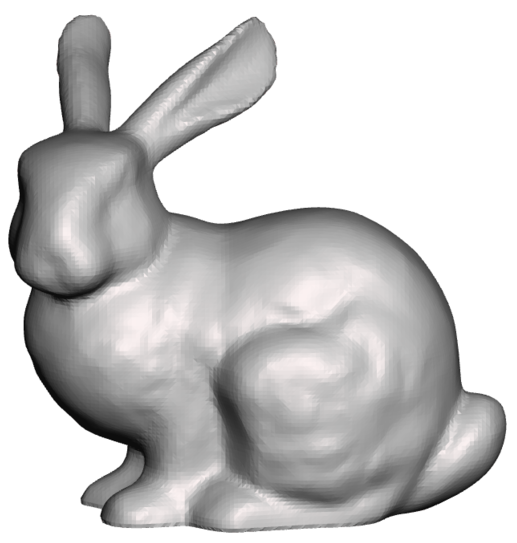
Signed Distance Functions (SDF)
Implicit Isosurface
Metric Constraint
Moving to 3D...
Signed Distance Functions (SDF)
Signed Distance Functions (SDF)
Train it on (x, y) tuples
Signed Distance Functions (SDF)
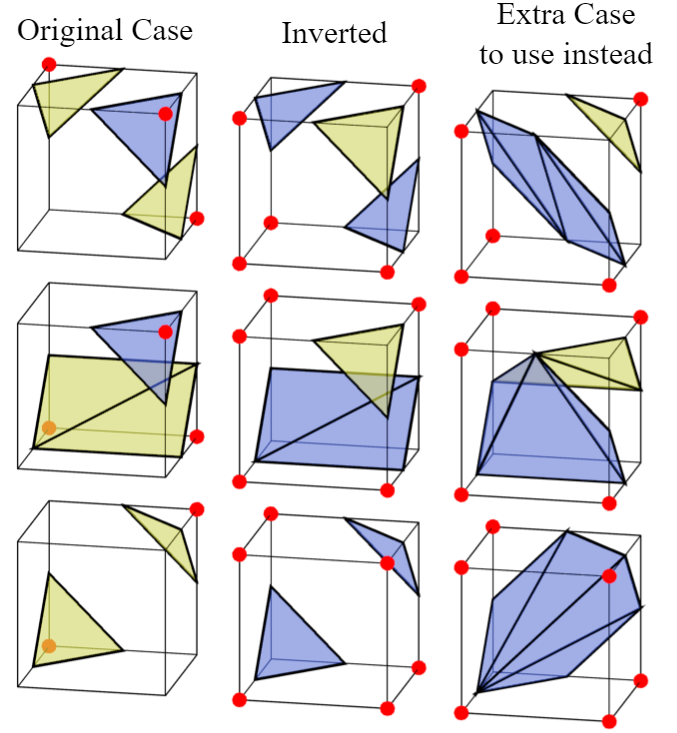
Marching Cubes
+
Train it on (x, y) tuples
3D models provided by
The YCB dataset

Training data
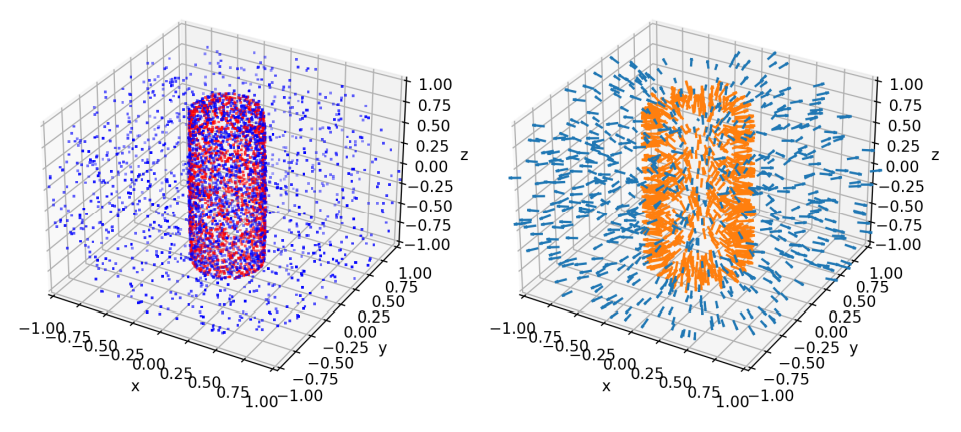
Signed Distances
Gradients
Positive SDF
Negative SDF
⬤
⬤
Free-space
Near-surface
⬤
⬤

Training data
Mesh
Gradients
Positive SDF
Negative SDF
⬤
⬤
Free-space
Near-surface
⬤
⬤
(Cosine similarity)
Mesh
Loss
Signed Distances
Requires us to compute
the derivative of the network itself
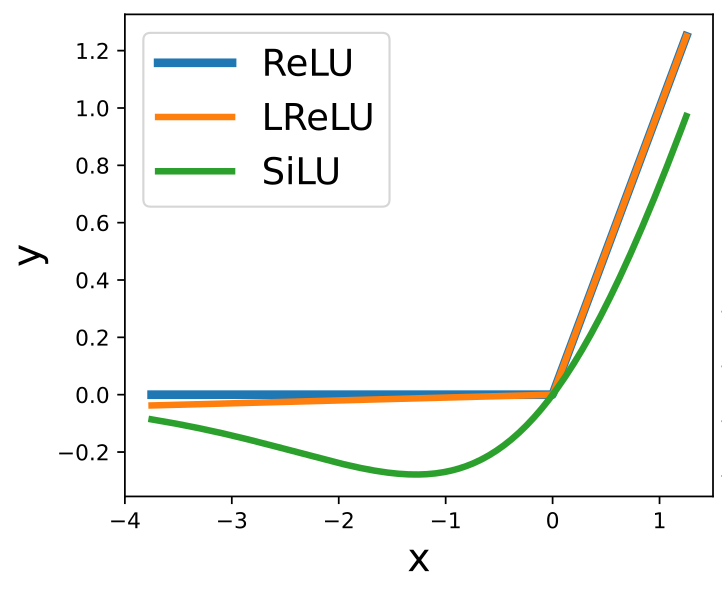
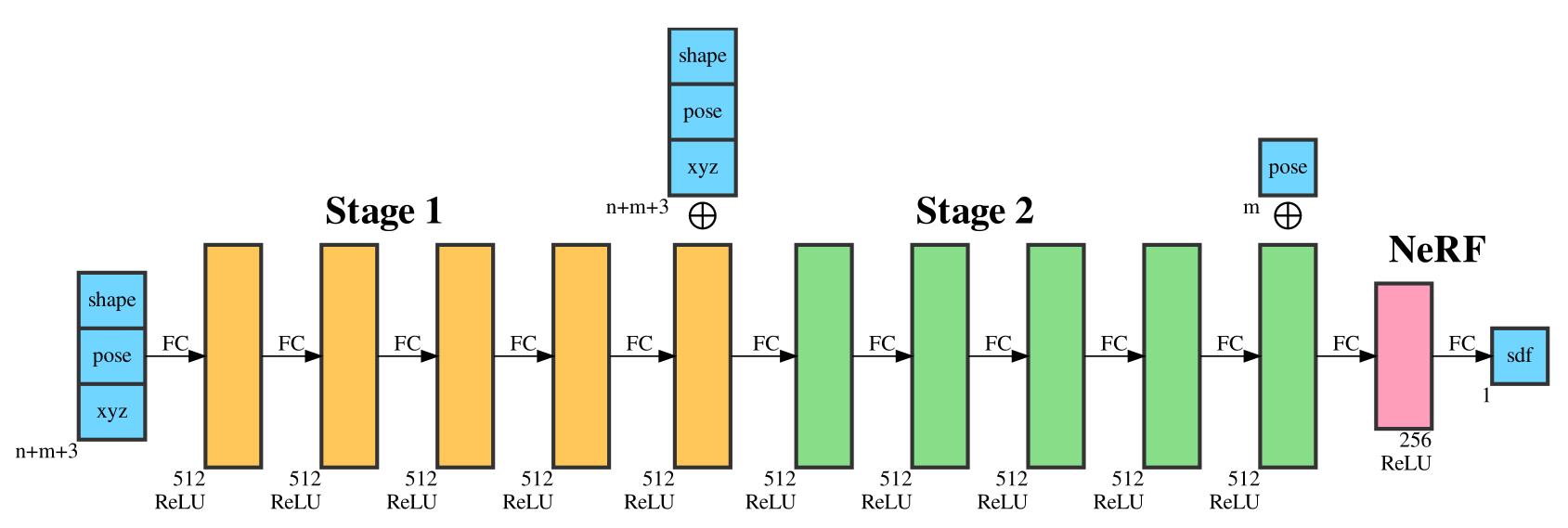
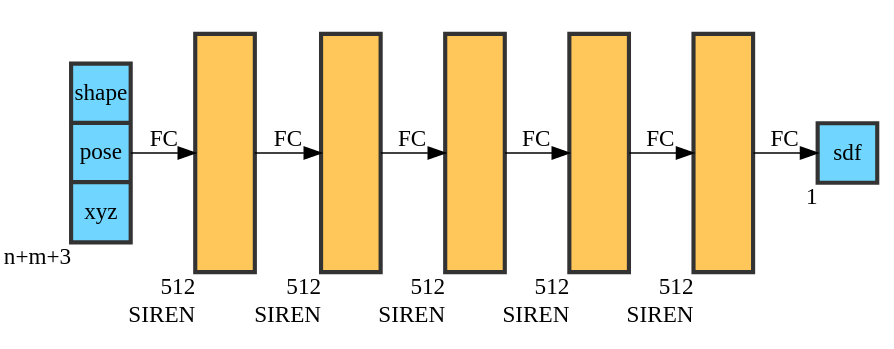
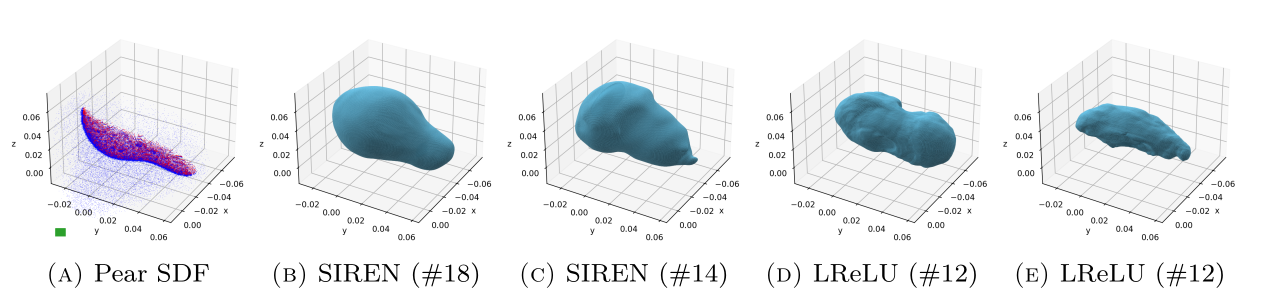
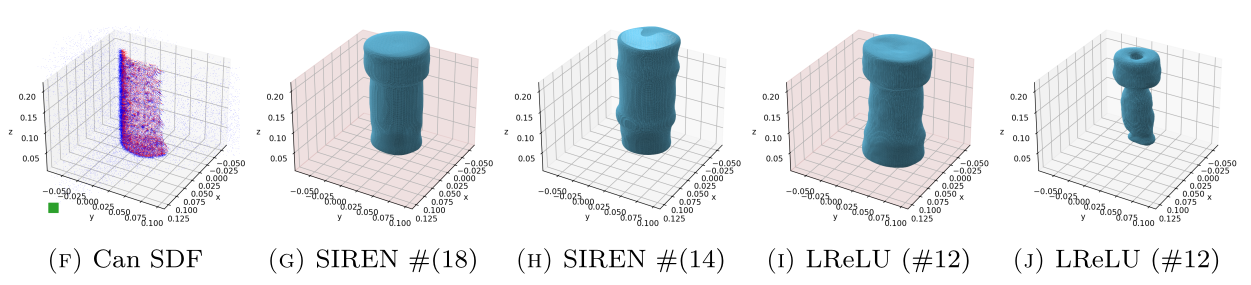
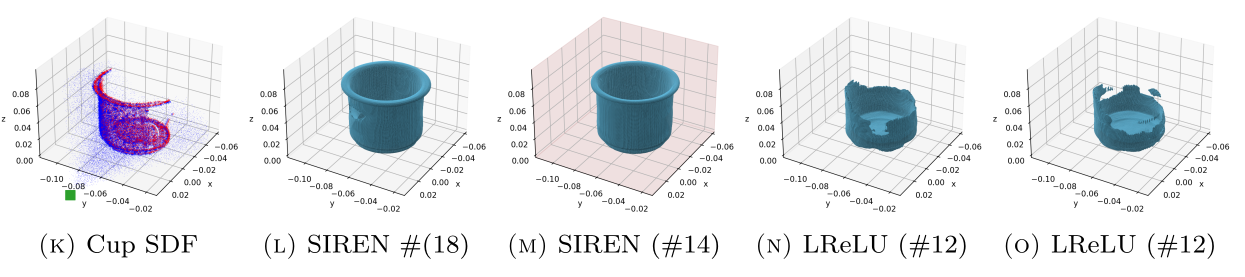
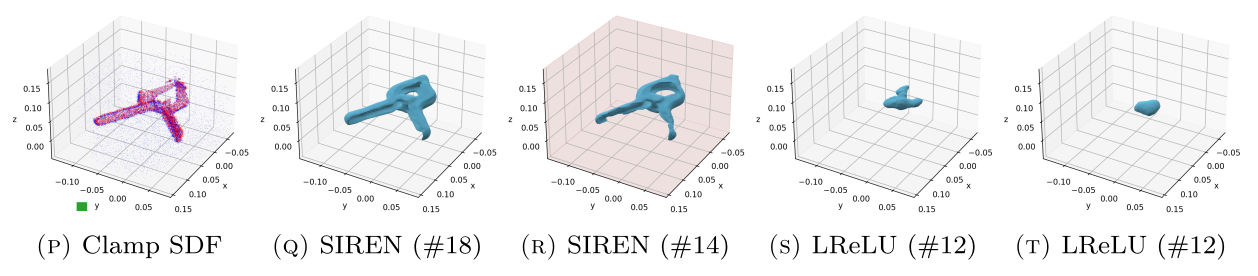
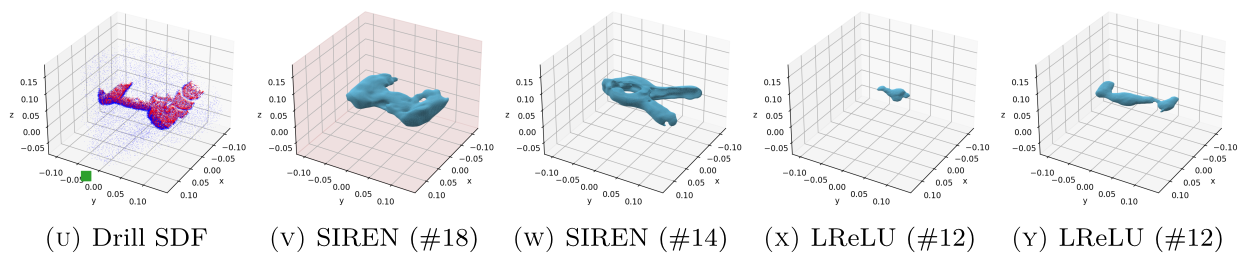
ReLU-based
Sinusoidal
- Piecewise linear
- Second derivative is zero!
Activation Function
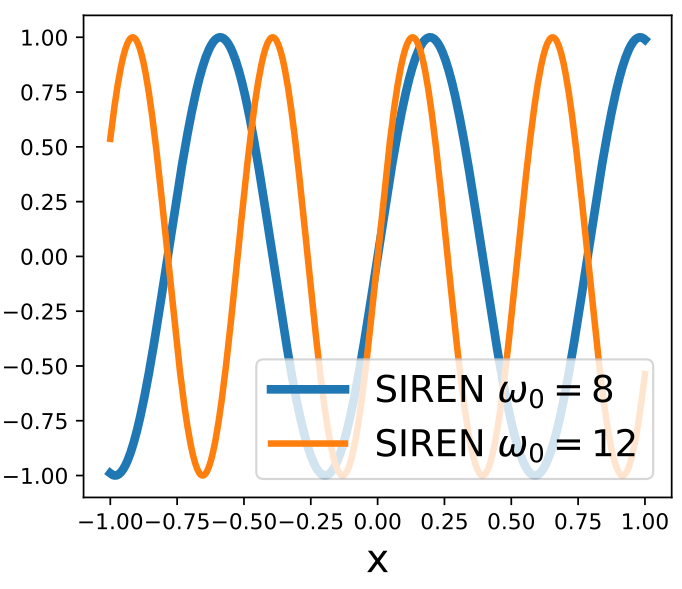
SIREN
- Piecewise linear
- Second derivative is zero!
- Can represent complex signals
- The derivative of a SIREN
is another SIREN!
Activation Function
ReLU-based






Ground-
Truth
ReLU
ReLU
w/gradients
SIREN
w/gradients
ReLU-based networks
SIREN networks

Learning a useful space of
prior shapes
Coded decoders
Embedding more than one shape
Learning latent spaces
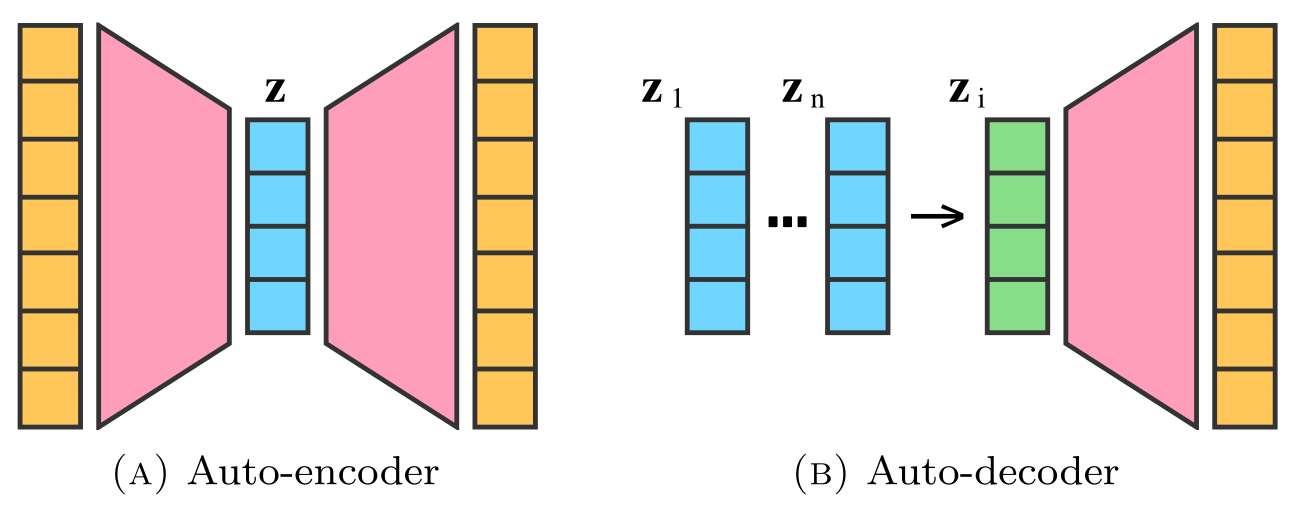
Auto-encoders map poorly
to learning implicit functions...
... and treat the latent vectors as learnable parameters!
-> Just skip the encoder!
Keep a database
of codes per object
Add a regularizing cost to each latent code in the auto-decoder database:
Problem: Learned latent vectors drift apart!
Pulls each code (z) towards 0, and
incentivise a spherical distribution
(Reconstruction loss)
(Latent code regularization)
and generalization.
Pose?
We need:
- Rotation (R)
- Scale (s)
- Translation (t)
Pose
We need:
- Rotation (R)
- Scale (s)
- Translation (t)
Then we train with random transformations,
and discover the pose via gradient decent at test time
Single-view data
We sample SDF points from two distributions:
- Near-surface samples: For surface details
- Ambient space samples: Improves generalization
The these two distributions
are balanced 90% / 10%
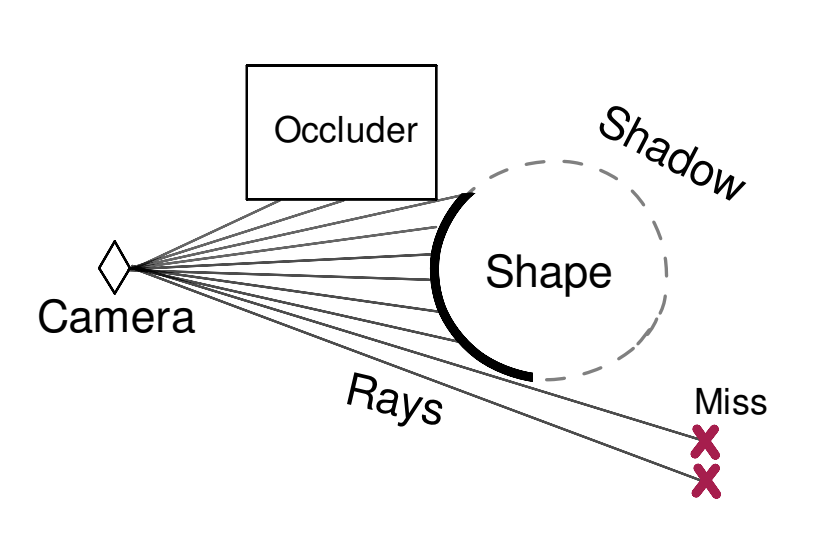
Single-view data
Hit
Miss
Camera
⬤
⬤
⬤
Positive
Negative
⬤
⬤
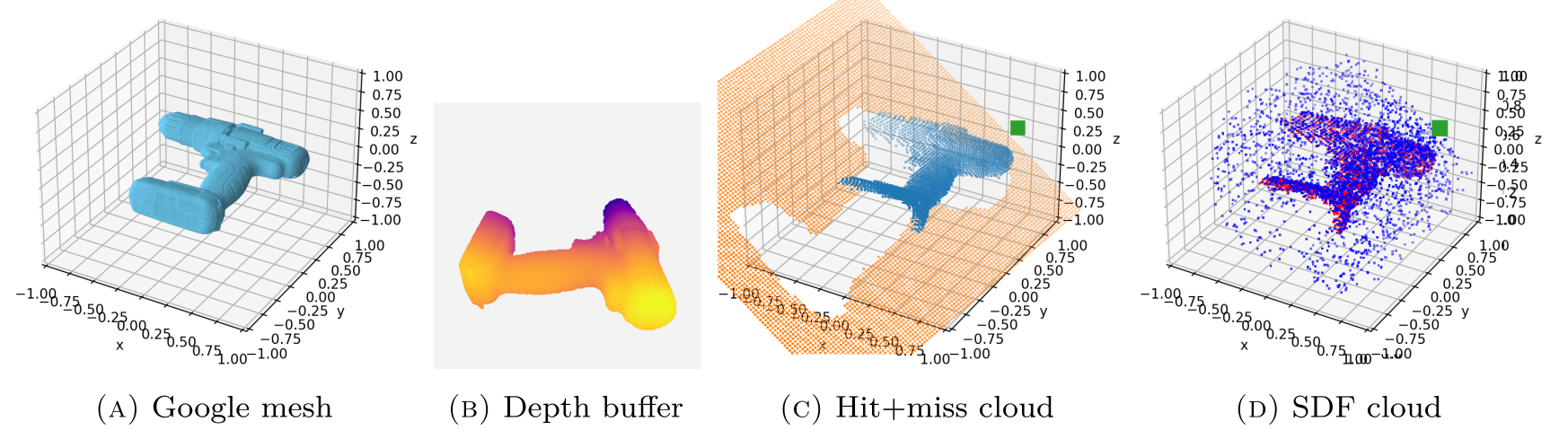
Sampling pipeline
Single-view data
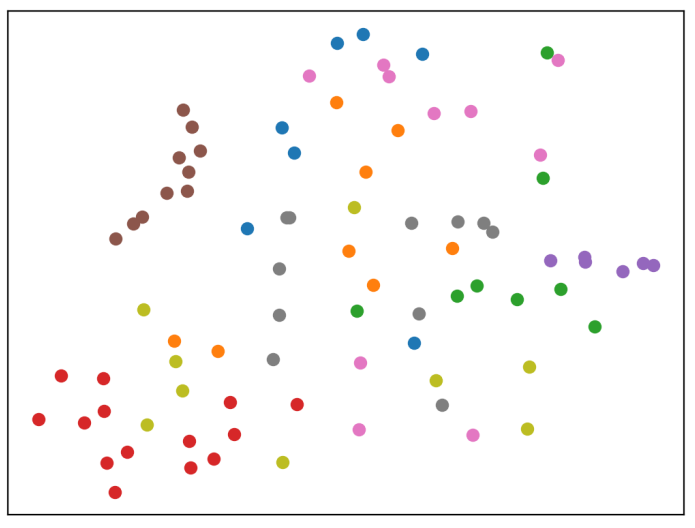
T-SNE of learned latent vectors

Shape completion:
- Start near the mean class vector (classifier needed)
- Further optimize the vector w.r.t. partial observation
using gradient decent




(start)
(end)
A Search
BigBIRD Scanner
Real data?
!
From the YCB data- and object set
BigBIRD Scanner
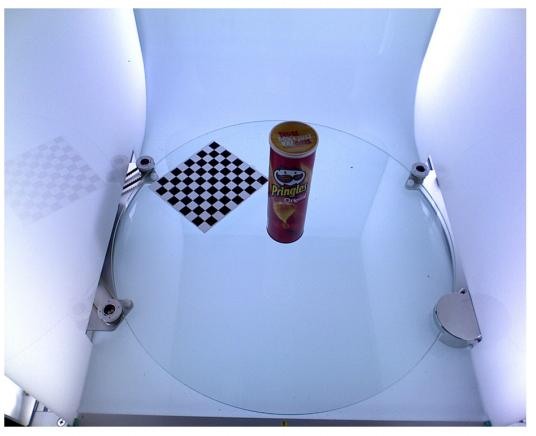
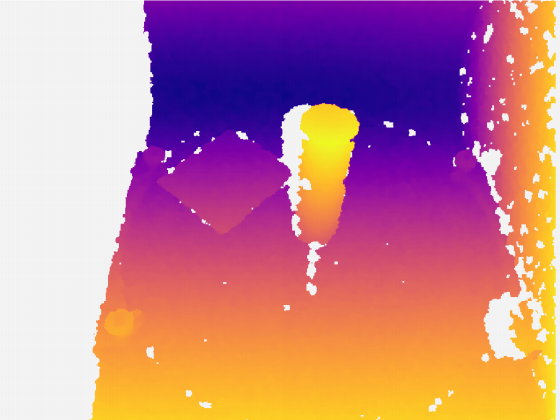
Color


Depth
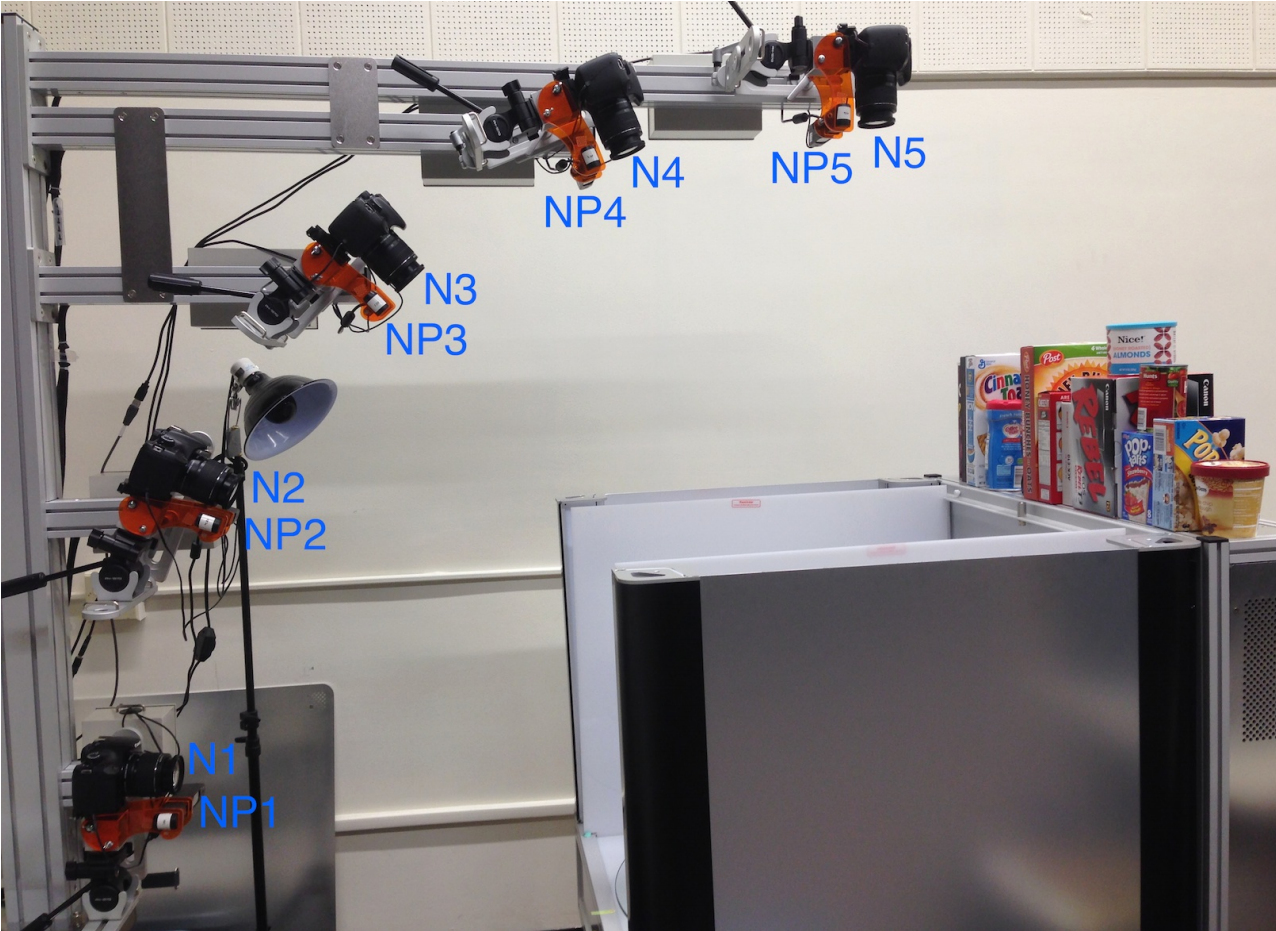
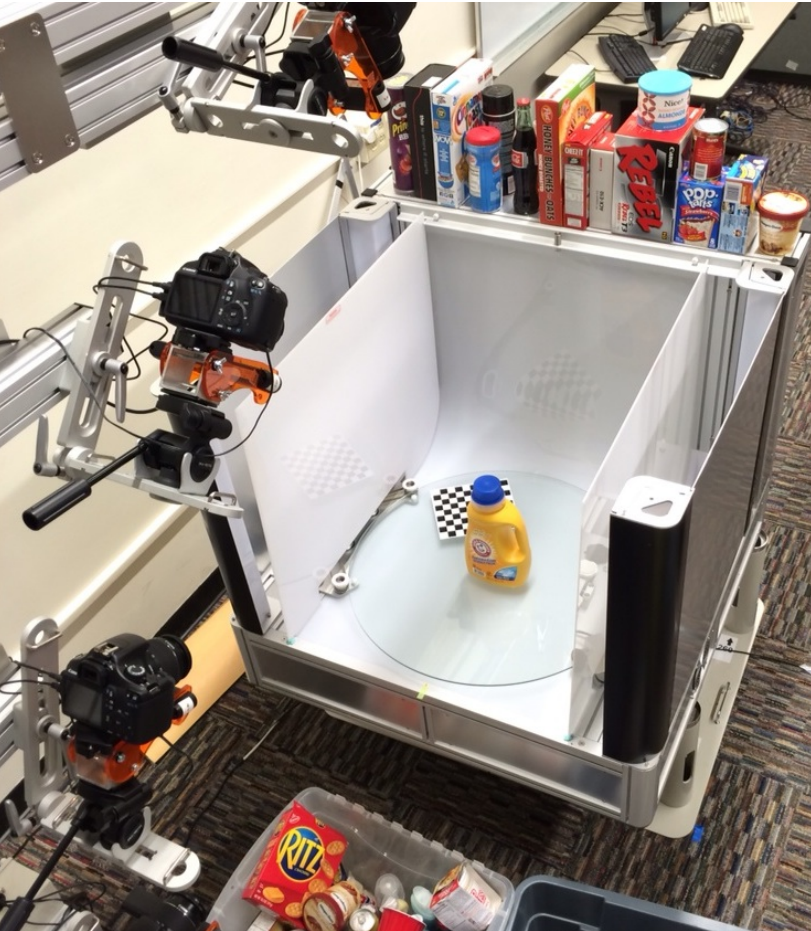
!
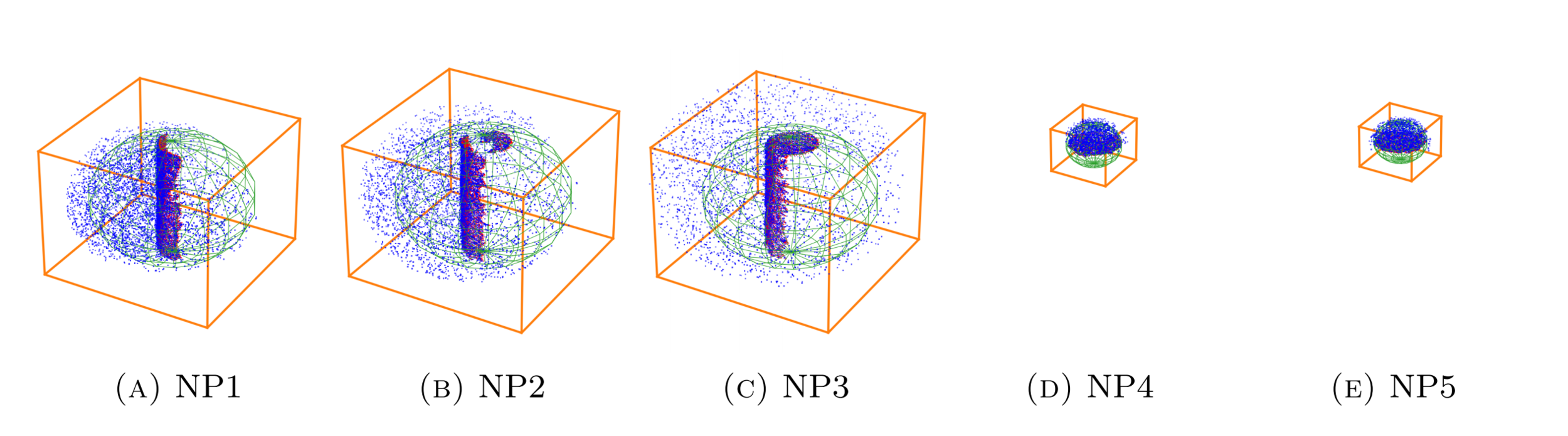
Positive SDF
Negative SDF
Unit sphere
Reconstruction
volume
⬤
⬤
⬤
⬤
Bounding box?
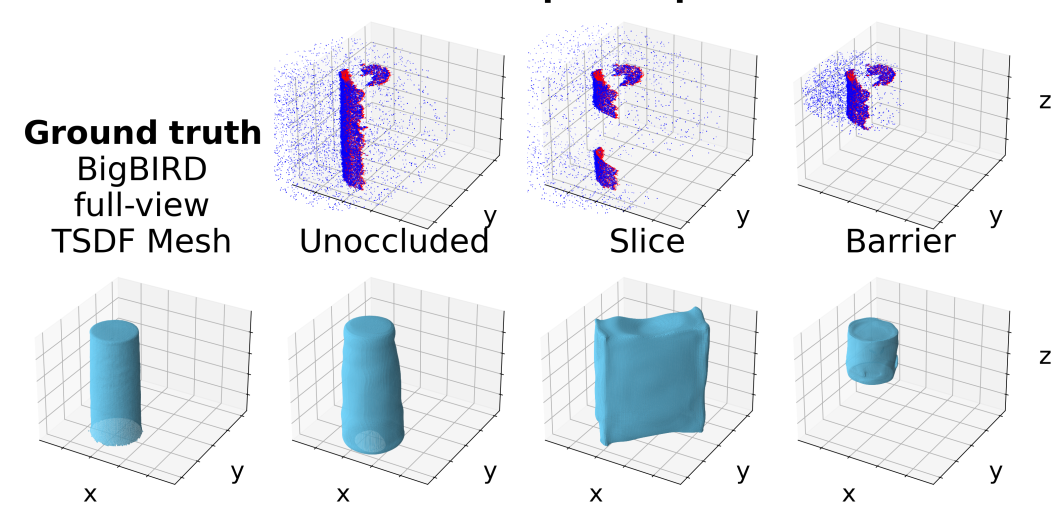
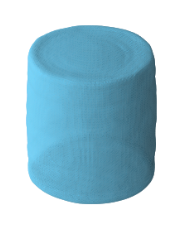
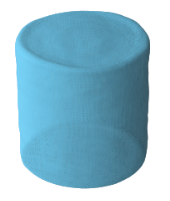
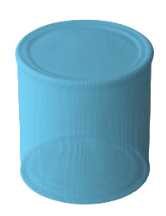
Ground-
Truth
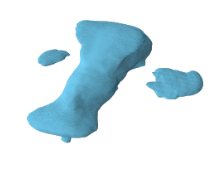
To be solved...
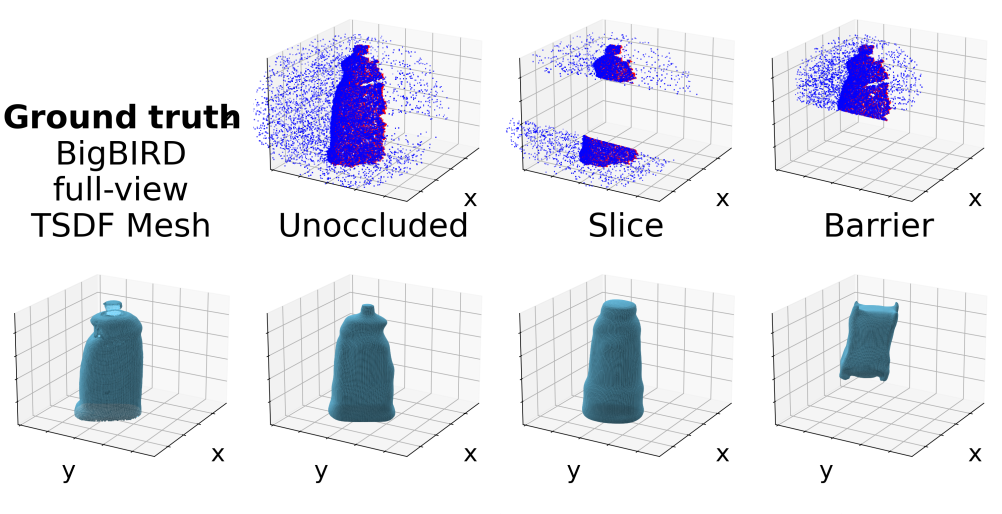
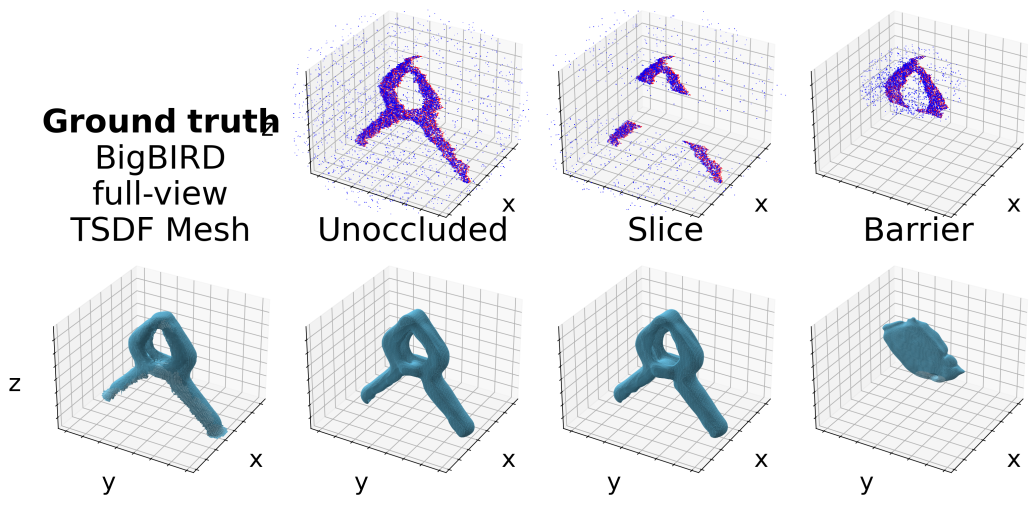
Testing Occlusions
Questions?
Tips?
https://s.ntnu.no/irobot
This is is the basis for a paper in the works.