Building an Ecosystem for Research on Touch Sensing
Roberto Calandra
ICRA2021 ViTac Workshop - 04 June 2021
Facebook AI Research
Touch Sensing is Hard
- Interdisciplinary field which requires vertical integration. From hardware design to touch processing; From robot control to applications.
- Many ad-hoc solutions and little re-use of existing components
(i.e., We keep reinventing the wheel over and over) - High entrance bar for new researchers and practitioners
- How can we lower the entrance bar?
- How can we improve reproducibility?
- How can we accelerate research by re-using existing components?
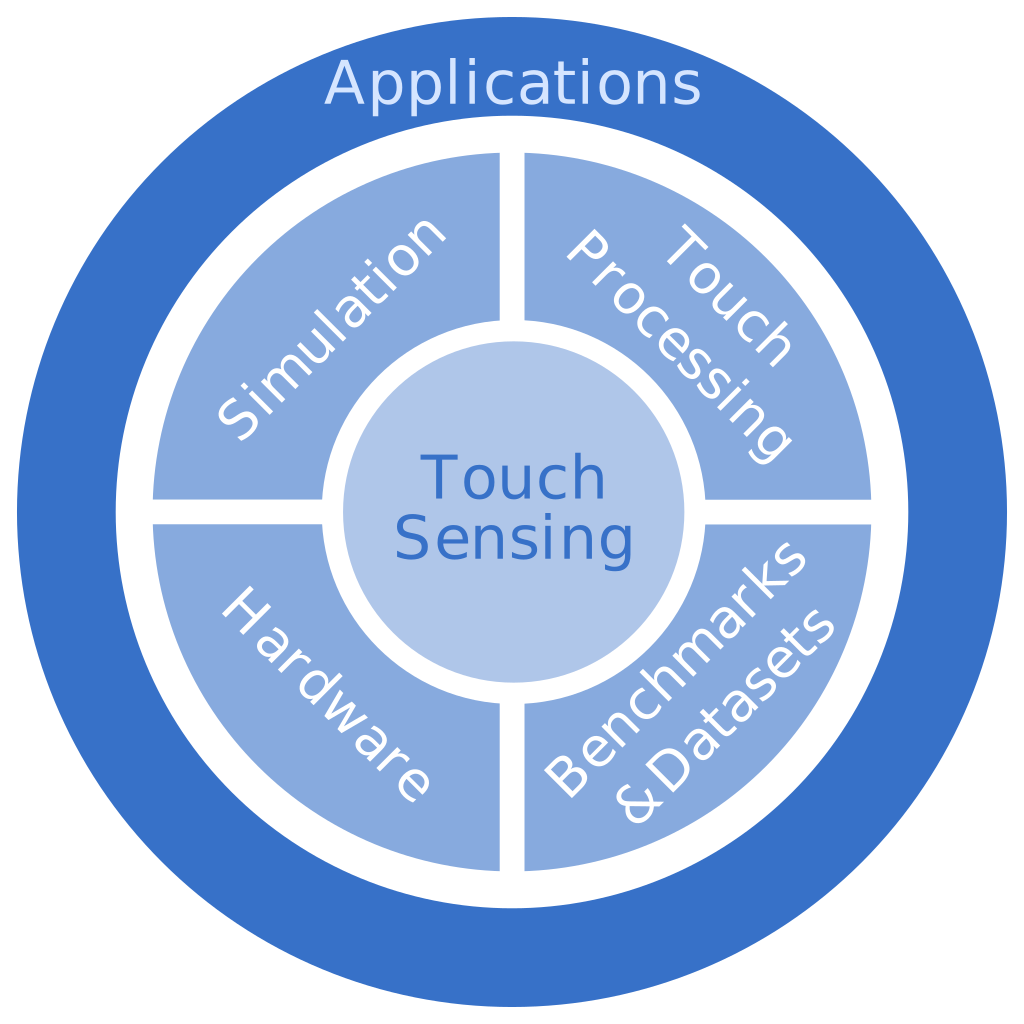
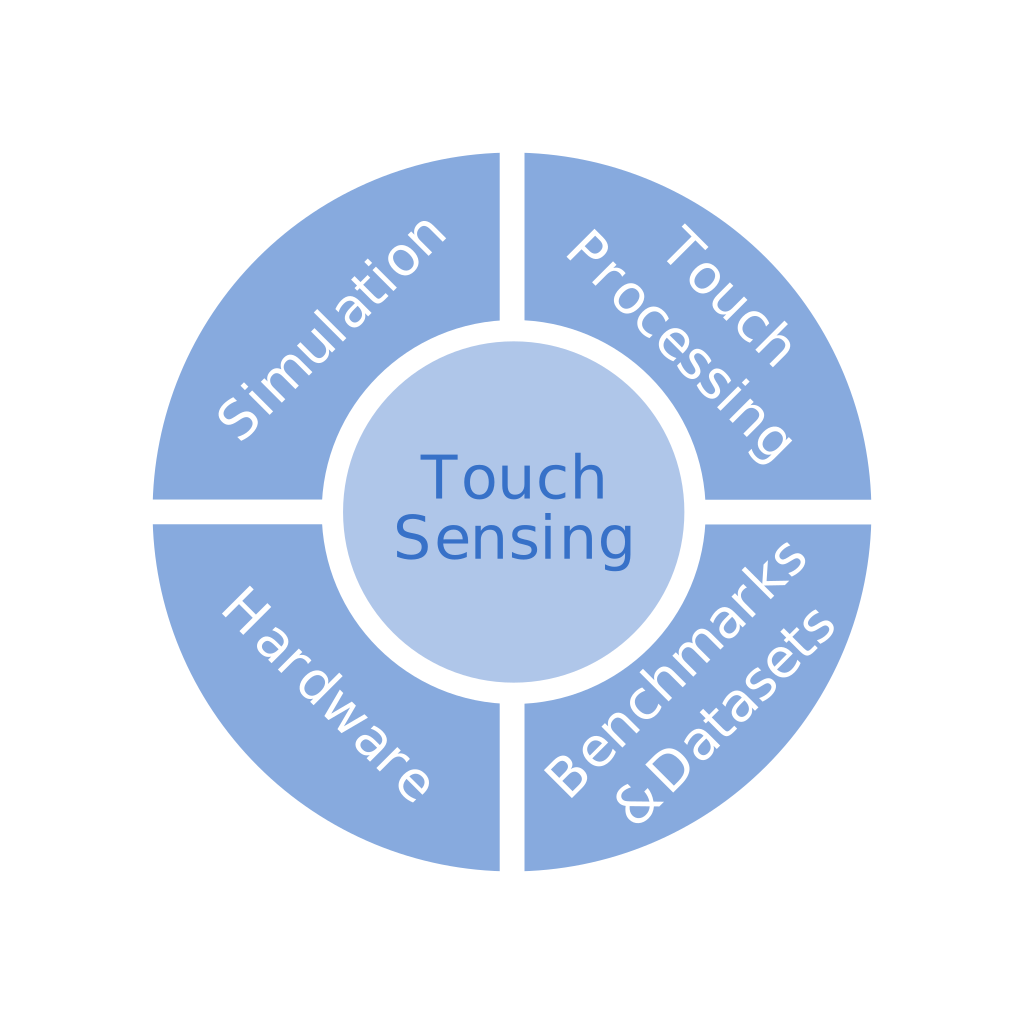
Standardization, and the creation of an ecosystem of tools
Hardware
Software

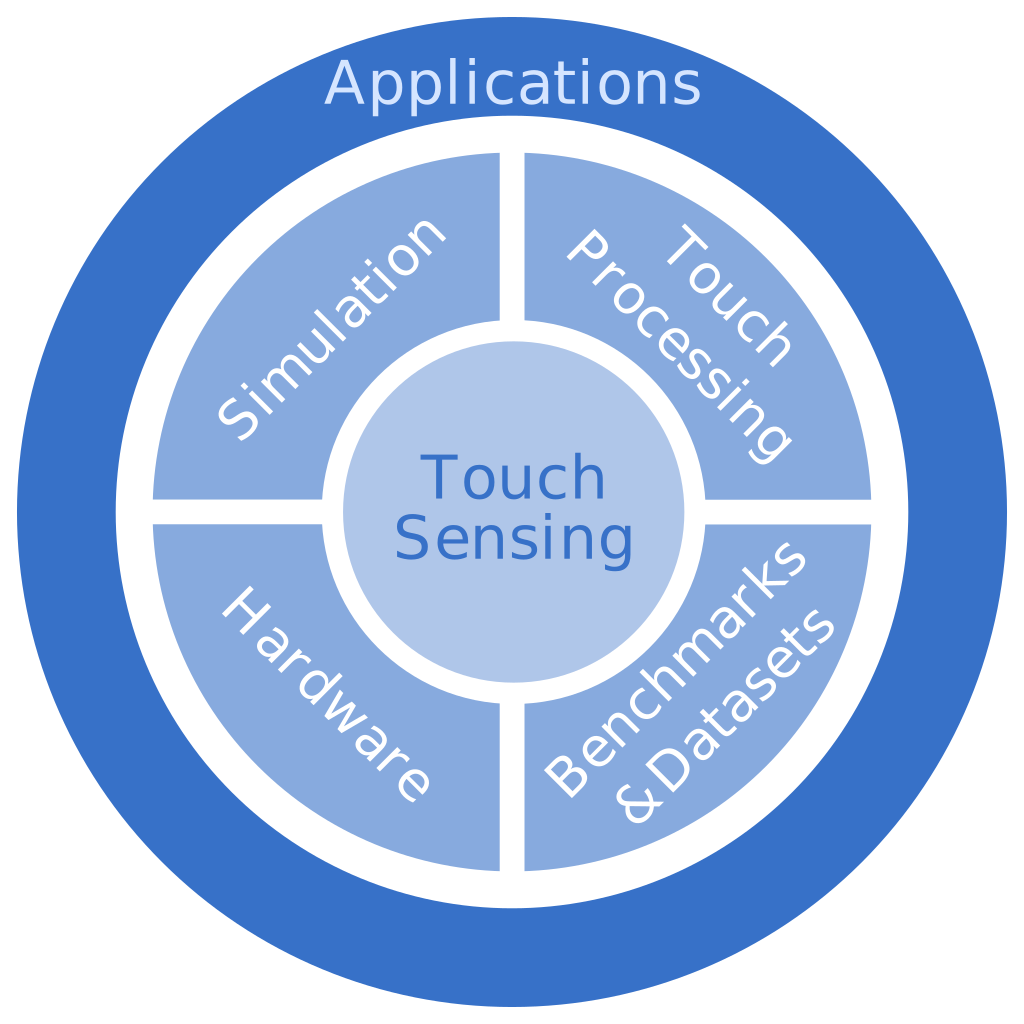
What do we need to make Touch Sensing practical and useful?
Making Touch Sensing Ubiquitous
DIGIT


Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845

Examples of DIGIT Measurements

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Comparison
BioTac
DIGIT

~15,000 $
Cost
~15 $*
Resolution
29
contact points
307,200
contact points
Mounted on multi-finger hands

Open-source


Being replicated in 15+ universities
1000x
Higher resolution
1000x
Cheaper
* manufacturing cost for 1000 units
Making Touch Sensing Ubiquitous
Touch Simulation
Simulators play a crucial role in prototyping, debugging and benchmarking new advances in robotics
- Most rigid-body-dynamics physics engines include some form of traditional tactile sensor (i.e., low-dimensional)
- These simulators became slower with the increasing number of contact points
- For 1000+ contact points provided by vision-based tactile sensors, they became impractical
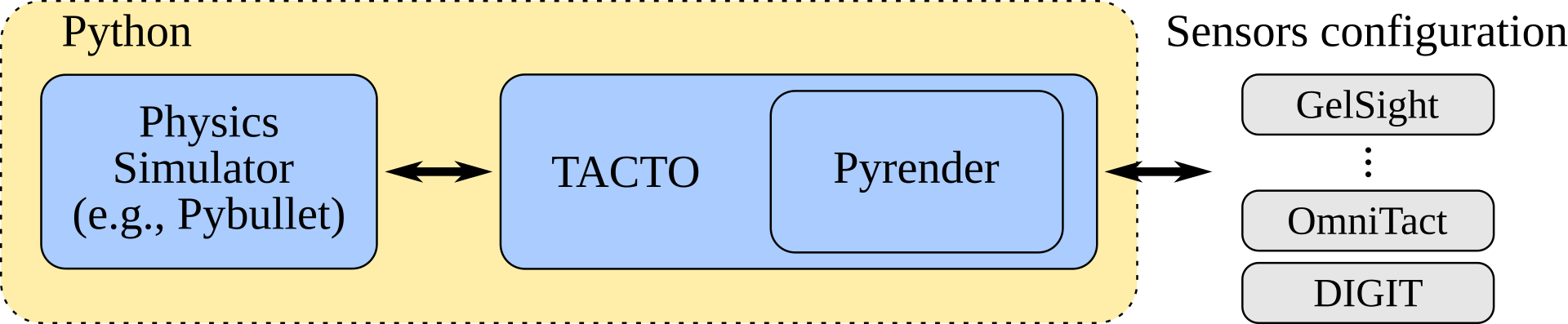
TACTO
Wang, S.; Lambeta, M.; Chou, P.-W. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
Under Review, 2020, Online: https://arxiv.org/abs/2012.08456
Features
- Fast (>100 fps)
- General-purpose
- Physics accuracy:
- Modeling of the contacts is delegated to the physics engine of choice (e.g., PyBullet)
- Works with rigid body
- Rendering accuracy:
- Very accurate
- Simulate "soft" deformation of the elastomer with growing forces
- Can be calibrated from real sensors (e.g., DIGIT)
- Open-source -- Anybody can contribute
Wang, S.; Lambeta, M.; Chou, P.-W. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
Under Review, 2020, Online: https://arxiv.org/abs/2012.08456
Software Architecture
Might be possible to use it for optimizing sensor design (?)
Rendering from Simulated DIGIT

Wang, S.; Lambeta, M.; Chou, P.-W. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
Under Review, 2020, Online: https://arxiv.org/abs/2012.08456
Making Touch Sensing Ubiquitous
The Next Breakthrough will be in Touch
Audio
Touch
Vision

(~1890)
(~1990)
(2020s ?)







Creating a Science of Touch Processing
Some of the open questions:
- What are good features for touch?
-
Do we need sensor standardization?
- What representation do we want/need for touch?
- What sensorial information do we even want/need for touch?
- What are the useful structures in computational models for touch?
- What are the useful metrics to characterize touch?
- How can we quantify the human psychophysics of touch?
- What are the different tasks that can benefit from touch?
- What are meaningful benchmarks for touch processing?
Very limited literature about computational processing of touch sensing
PyTouch: A Machine Learning Library
for Touch Processing
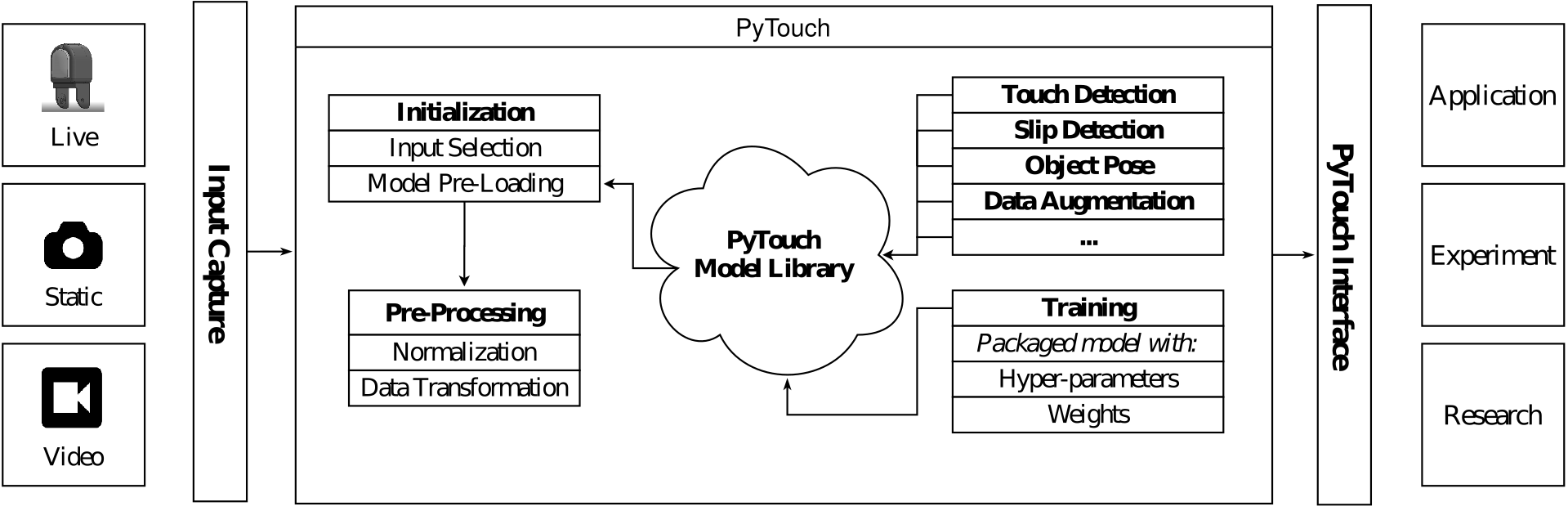
Goal: Create the equivalent of OpenCV for Touch
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Features of PyTouch
- First Machine Learning library dedicated to Touch Processing
(Based on PyTorch) - Hardware-agnostic abstractions for rapid experimentation
- Platform for standardizing evaluation and comparison of different models
- Touch "as-a-service"
- Allows non-ML-experts to use SOTA ML models in their applications
- Pre-trained models (e.g., Touch detection and slip for DIGIT)
- (Can also be used for fast fine-tuning)
- Native integration with DIGIT (hardware) and Tacto (simulator)
- (Working on supporting non vision-based sensors)
- Open-source -- Anybody can contribute
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Code Example

Learning from Multiple Sensors Improve
Performance (Touch Detection Task)


Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Making Touch Sensing Ubiquitous
Benchmarks & Datasets
Benchmarks:
Datasets:
- What are the tasks that we care about as a community?
- Now is the time to think about Benchmarks:
- The first enabler is accurate touch simulators
- The second enabler is standardized easily available hardware (e.g., DIGIT)
- Very few touch sensing datasets available nowadays
- Data collection is currently limited by the reliability of hardware
- Simulators, and available hardware will enable new and larger datasets
(But we also need as a community to encourage and nurture this)
Learning Grasp Stability

Wang, S.; Lambeta, M.; Chou, P.-W. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
Under Review, 2020, Online: https://arxiv.org/abs/2012.08456
Making Touch Sensing Ubiquitous
3D Reconstruction from Vision and Touch

Smith, E. J.; Calandra, R.; Romero, A.; Gkioxari, G.; Meger, D.; Malik, J. & Drozdzal, M.
3D Shape Reconstruction from Vision and Touch
Advances in Neural Information Processing Systems (NeurIPS), 2020, online: https://arxiv.org/abs/2007.03778
Learning to Play Piano with Touch

Xu, H.; Luo, Y.; Wang, S.; Darrell, T. & Calandra, R.
Towards Learning to Play Piano with Dexterous Hands and Touch
Under Review, 2021, online: https://arxiv.org/abs/2106.02040
Learned Compositional Policy
Xu, H.; Luo, Y.; Wang, S.; Darrell, T. & Calandra, R.
Towards Learning to Play Piano with Dexterous Hands and Touch
Under Review, 2021, online: https://arxiv.org/abs/2106.02040
Making Touch Sensing Ubiquitous
Community
Slack Workplace

To Conclude
Human Collaborators











Overview
- Touch is a key sensor modality for humans and robots
- Our goal is create an ecosystem that simplify integration and enable to perceive, understand, and interact through touch
- Hardware
- Simulation
- Touch Processing
- Benchmarks and Datasets
- Applications
- We want to grow and support Community
- Towards the long-term goal of making touch sensing practical and more accessible (both in research and in the real-world)
Questions?
Backup Slides
References (of our work on touch sensing)
-
Wang, S.; Lambeta, M.; Chou, L. & Calandra, R.
TACTO: A Fast, Flexible and Open-source Simulator for High-Resolution Vision-based Tactile Sensors
Under Review, 2020, Online: https://arxiv.org/abs/2012.08456 - Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
A Machine Learning Framework for Touch Processing
Under Review, 2020 -
Smith, E. J.; Calandra, R.; Romero, A.; Gkioxari, G.; Meger, D.; Malik, J. & Drozdzal, M.
3D Shape Reconstruction from Vision and Touch
Advances in Neural Information Processing Systems (NeurIPS), 2020 - Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845 - Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C. & Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA), 2020 - Lin, J.; Calandra, R. & Levine, S.
Learning to Identify Object Instances by Touch: Tactile Recognition via Multimodal Matching
IEEE International Conference on Robotics and Automation (ICRA), 2019, 3644-3650 - Tian, S.; Ebert, F.; Jayaraman, D.; Mudigonda, M.; Finn, C.; Calandra, R. & Levine, S.
Manipulation by Feel: Touch-Based Control with Deep Predictive Models
IEEE International Conference on Robotics and Automation (ICRA), 2019, 818-824 - Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307 - Calandra, R.; Owens, A.; Upadhyaya, M.; Yuan, W.; Lin, J.; Adelson, E. H. & Levine, S.
The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes?
Conference on Robot Learning (CORL), 2017, 314-323 - Yi, Z.; Calandra, R.; Veiga, F. F.; van Hoof, H.; Hermans, T.; Zhang, Y. & Peters, J.
Active Tactile Object Exploration with Gaussian Processes
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, 4925-4930 - Calandra, R.; Ivaldi, S.; Deisenroth, M. P.; Rueckert, E. & Peters, J.
Learning Inverse Dynamics Models with Contacts
IEEE International Conference on Robotics and Automation (ICRA), 2015, 3186-3191 - Calandra, R.; Ivaldi, S.; Deisenroth, M. P. & Peters, J.
Learning Torque Control in Presence of Contacts using Tactile Sensing from Robot Skin
IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), 2015, 690-695
Human Collaborators

The Importance of Touch
From the lab of Dr. Ronald Johansson, Dept. of Physiology, University of Umea, Sweden
The Importance of Touch (in Humans)
What do we want to achieve?
- Spearhead advances in Tactile Sensing
- Develop touch-based applications. Among others:
- Robotics (e.g., Manipulation)
- AR/VR (e.g., the social aspect of touch)
Achieving Human-level Manipulation with Robots
Learning to Manipulate a Marble
Marble Manipulation Results


Motivation
How to scale to more complex, unstructured domains?






Robotics
Finance
Biological Sciences
Logistics /
Decision Making
Why Robots?
Disaster Relief

Industrial Automation


Exploration


Medicine & Eldercare


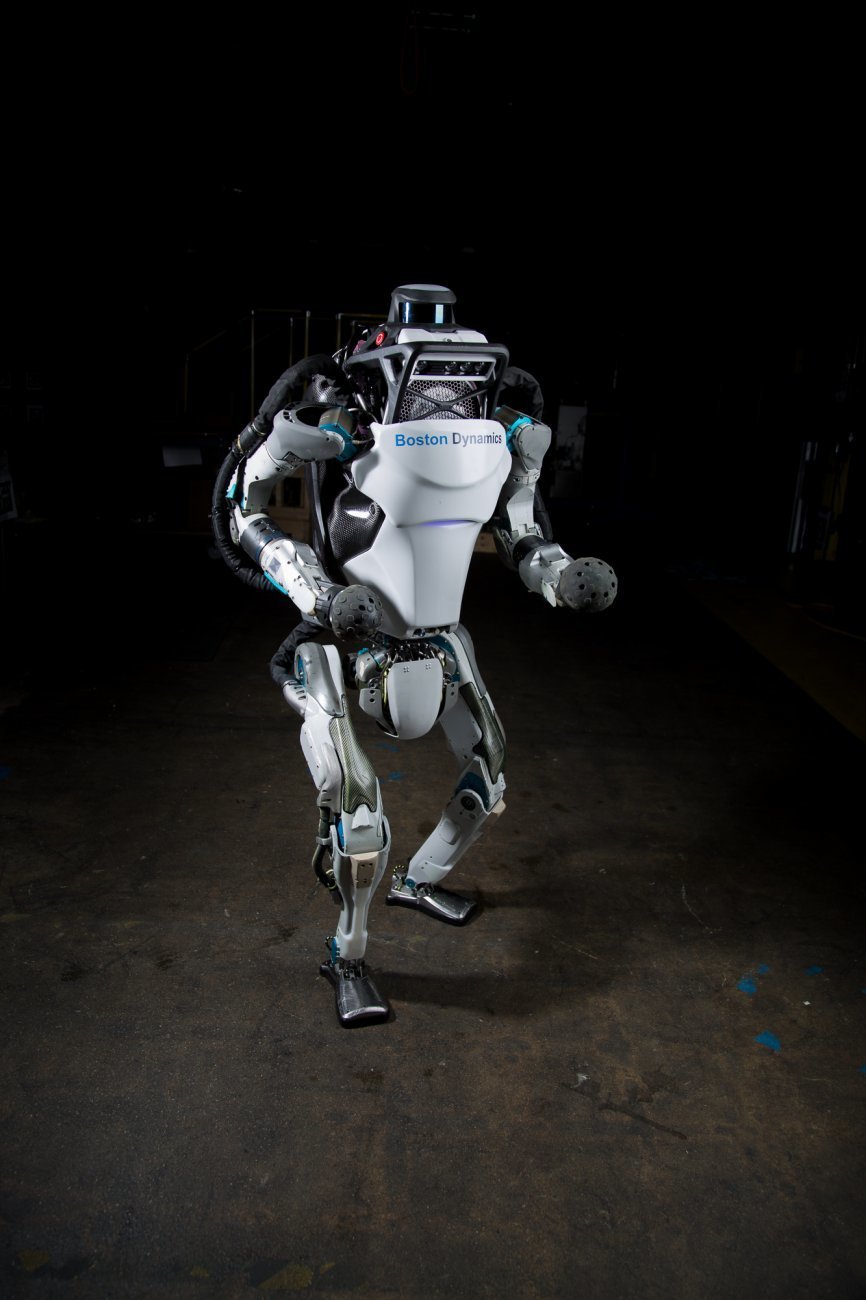
State of the Art in Robotics
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
What are we missing?

Tactile Sensors in Robotics
Important factors:
- Availability
- Cost
- Form factor
- Capabilities
(e.g., what is measured, resolution) - Reliability

Many many sensors in the literature:
- Most are prototypes
- A handful are commercially available
or can be easily manufactured


[Wilson et al., 2019]
[Piacenza et al., 2020]
[ Fischel et al., 2012]

[Zhang et al., 2018]

[Church et al., 2019]
Traditional Sensors


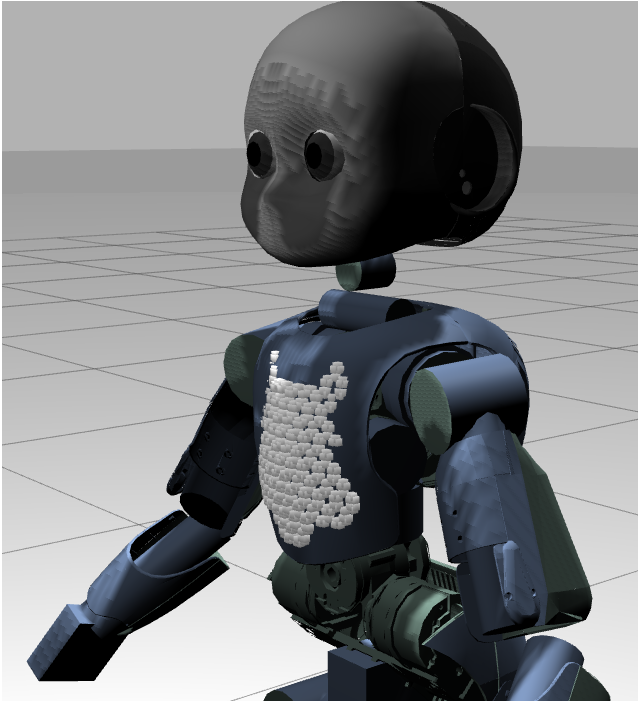
Cannata, G.; Maggiali, M.; Metta, G. & Sandini, G.
An embedded artificial skin for humanoid robots
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2008, 434-438
- Resistive or Capacitive technology
- Several limitations:
- Usually, measure force or orthogonal component of force
- Relatively low density
- Usually, low-dimensional (i.e., <100) due to cost, mechanical and communication reasons
- Often need to be calibrated
Vision-based Tactile Sensors
[Kamiyama, K.; Kajimoto, H.; Kawakami, N. & Tachi, S. Evaluation of a vision-based tactile sensor IEEE International Conference on Robotics and Automation (ICRA), 2004, 2, 1542-1547 ]
[Johnson, M. K. & Adelson, E. H. Retrographic sensing for the measurement of surface texture and shape Computer Vision and Pattern Recognition (CVPR), 2009, 1070-1077]
[Abad, A. C. & Ranasinghe, A. Visuotactile Sensors With Emphasis on GelSight Sensor: A Review IEEE Sensors Journal, 2020, 20, 7628-7638]

Credit:
[Yuan, W.; Dong, S. & Adelson, E. H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force Sensors, Multidisciplinary Digital Publishing Institute, 2017]
Elastomer Robustness

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Design
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Replaceable Elastomer




Reflective
Reflective
+
Markers
Transparent
+
Markers
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Some Touch Sensing Applications
Predicting Good Grasps
Learning how to Grasp
Active Tactile Exploration
3D Reconstruction from Vision and Touch
Identify Objects from Touch



Learning Grasp Stability
Calandra, R.; Owens, A.; Upadhyaya, M.; Yuan, W.; Lin, J.; Adelson, E. H. & Levine, S.
The Feeling of Success: Does Touch Sensing Help Predict Grasp Outcomes?
Conference on Robot Learning (CORL), 2017, 314-323
Results
Self-supervised Data Collection
- Setting:
- 7-DOF Sawyer arm
- Weiss WSG-50 Parallel gripper
- one GelSight on each finger
- Two RGB-D cameras in front and on top
- (Almost) fully autonomous data collection:
- Estimates the object position using depth, and perform a random grasp of the object.
- Labels automatically generated by looking at the presence of contacts after each attempted lift
Examples of Training Objects
Collected 6450 grasps from over 60 training objects over ~2 weeks.

Visuo-tactile Learned Model

Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
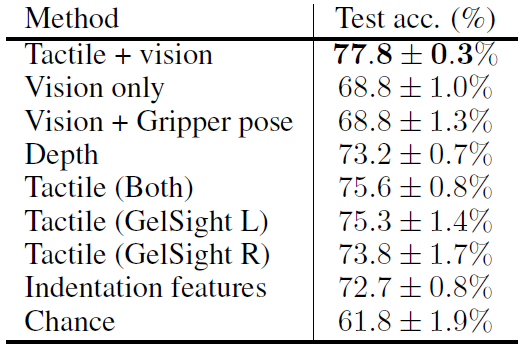
Grasp Success on Unseen Objects
83.8% grasp success on 22 unseen objects
(using only vision yields 56.6% success rate)
Gentle Grasping
- Since our model considers forces, we can select grasps that are effective, but gentle
- Reduces the amount of force used by 50%, with no significant loss in grasp success


Calandra, R.; Owens, A.; Jayaraman, D.; Yuan, W.; Lin, J.; Malik, J.; Adelson, E. H. & Levine, S.
More Than a Feeling: Learning to Grasp and Regrasp using Vision and Touch
IEEE Robotics and Automation Letters (RA-L), 2018, 3, 3300-3307
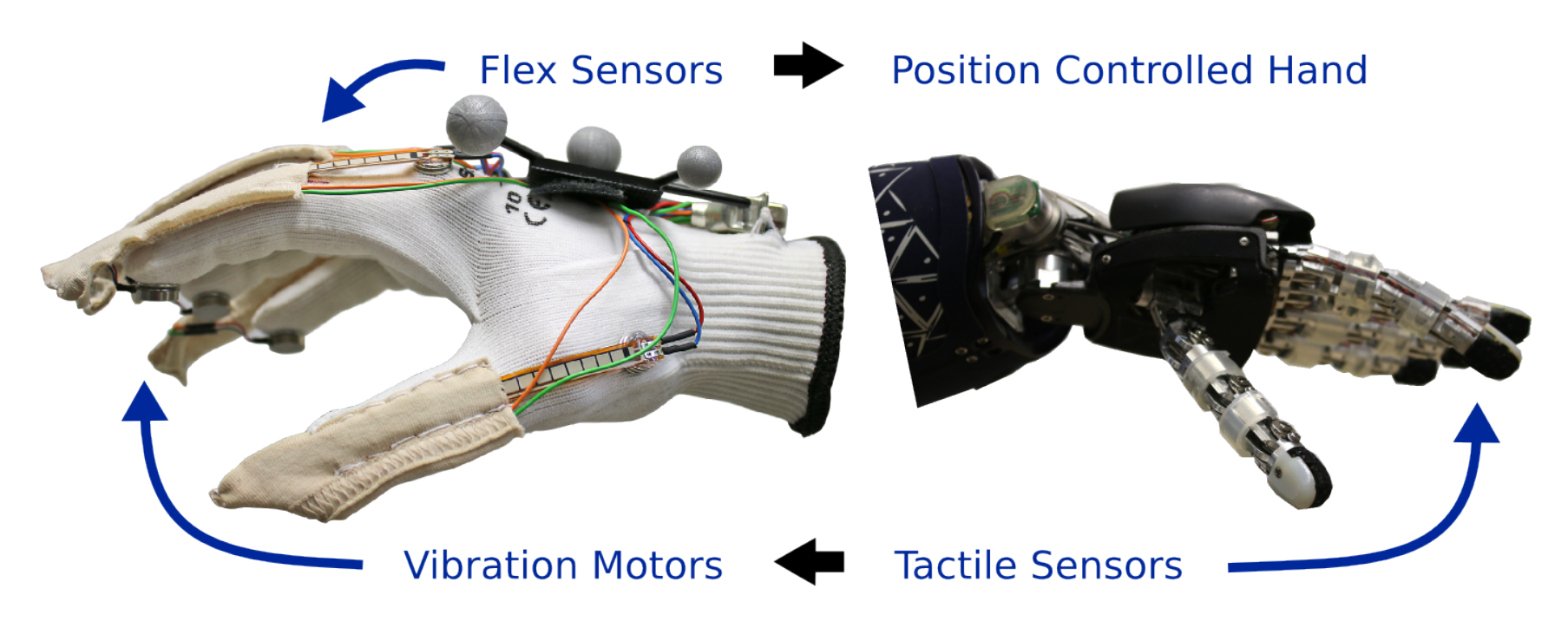
Touch Sensing for Tele-operation
Fritsche, L.; Unverzagt, F.; Peters, J. & Calandra, R.
First-Person Tele-Operation of a Humanoid Robot
IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), 2015, 997-1002
Learning Fine In-finger Manipulation

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Model-based Reinforcement Learning

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Marble Manipulation



Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845