Building an Ecosystem for Research on (Artificial) Touch Sensing
Roberto Calandra
Workshop @IEEE World Haptics Conference - 10 July 2023
Learning, Adaptive Systems, and Robotics (LASR) Lab


State of the Art in Robotics
From YouTube: https://www.youtube.com/watch?v=g0TaYhjpOfo
What are we missing?

- Optimization
- Modeling dynamical systems
- Reinforcement Learning
- Control and planning
- Dexterous manipulation
- Locomotion
- Hardware design
- Touch Processing
- Applications
Learning, Adaptive Systems, and Robotics (LASR) Lab
Machine Learning
Robotics
Touch
Sensing
Hardware
Software

In this talk
The Importance of Touch
Touch Sensing is Hard
- Interdisciplinary field which requires vertical integration. From hardware design to touch processing; From robot control to applications.
- Many ad-hoc solutions and little re-use of existing components
(i.e., We keep reinventing the wheel over and over) - High entrance bar for new researchers and practitioners
- How can we lower the entrance bar?
- How can we improve reproducibility?
- How can we accelerate research by re-using existing components?
Standardization, and the creation of an ecosystem of tools
Grand Vision

+ Applications
+ Community
Hardware
DIGIT

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845


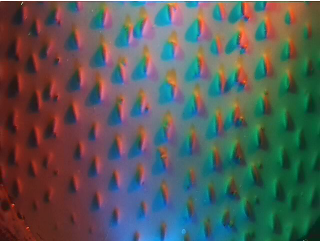
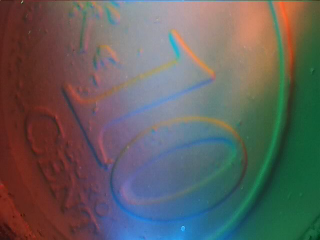
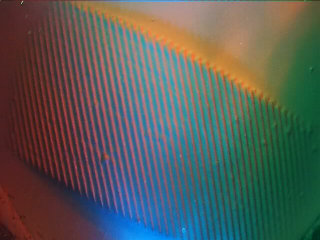
Examples of DIGIT Measurements
Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845




Comparison
BioTac
DIGIT

~15,000 $
Cost
~15 $*
Resolution
29
taxels
307,200
taxels
Mounted on multi-finger hands

Open-source


1000x
Higher resolution
1000x
Cheaper
* component cost for 1000 units, not including labor
DIGIT Commercialization
-
Replicated in 20+ universities
-
Yet, it can still be challenging to manufacture a sensor without mechanical/electrical experience
-
Partnership with GelSight Inc. to commercialize DIGIT
-
Most widespread tactile sensor in robotics!
-
Part of Mitsubishi Electric RAISE (Robotics as an Intelligent Services Ecosystem)
-

OmniTact
Padmanabha, A.; Ebert, F.; Tian, S.; Calandra, R.; Finn, C.; Levine, S.
OmniTact: A Multi-Directional High-Resolution Touch Sensor
IEEE International Conference on Robotics and Automation (ICRA) , 2020

Touch Processing
Creating a New Science of Touch Processing
Some of the open questions:
- What are good features for touch?
-
Do we need sensor standardization?
- What representation do we want/need for touch?
- What sensorial information do we even want/need for touch?
- What are the useful structures in computational models for touch?
- What are the useful metrics to characterize touch?
- How can we quantify the human psychophysics of touch?
- What are the different tasks that can benefit from touch?
- What are meaningful benchmarks for touch processing?
Very limited literature about computational processing of touch sensing
PyTouch: A Machine Learning Library
for Touch Processing
Goal: Create the equivalent of OpenCV for Touch
Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791

Learning from Multiple Sensors Improve
Performance (Touch Detection Task)


Lambeta, M.; Xu, H.; Xu, J.; Chou, P.-W.; Wang, S.; Darrell, T. & Calandra, R.
PyTouch: A Machine Learning Library for Touch Processing
IEEE International Conference on Robotics and Automation (ICRA), 2021, Online: https://arxiv.org/abs/2105.12791
Learning Re-usable Visio-Tactile Representations
Kerr, J.; Huang, H.; Wilcox, A.; Hoque, R.; Ichnowski, J.; Calandra, R. & Goldberg, K.
Self-Supervised Visuo-Tactile Pretraining to Locate and Follow Garment Features
Accepted to RSS 2023, Online: https://arxiv.org/pdf/2209.13042

Applications
Some Touch Sensing Applications
Predicting Grasp Stability
[Calandra et al. 2017]
Learning how to (Re)Grasp
[Calandra et al. 2018]
Active Tactile Exploration
[Yi at al. 2016]
3D Reconstruction from Vision and Touch
[Smith et al. 2020; Smith et al. 2021]
Identify Objects from Touch
[Lin et al. 2019]





Learning to Play Piano from Touch
[Xu at al. 2022]

Lambeta, M.; Chou, P.-W.; Tian, S.; Yang, B.; Maloon, B.; Most, V. R.; Stroud, D.; Santos, R.; Byagowi, A.; Kammerer, G.; Jayaraman, D. & Calandra, R.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation
IEEE Robotics and Automation Letters (RA-L), 2020, 5, 3838-3845
Achieving Human-level Manipulation with Robots
Do we really need Touch?
Qi, H.; Kumar, A.; Calandra, R.; Ma, Y. & Malik J.
In-Hand Object Rotation via Rapid Motor Adaptation
Conference on Robot Learning (CORL), 2022, https://arxiv.org/abs/2210.04887
To Conclude
Human Collaborators

Slack Channel

1st Workshop on Touch Processing
15/16 December 2023 @ NeurIPS
New Orleans, United States
We are Hiring
- Post-docs
- PhD Students
- Robot Lab Manager

Overview
- Touch is a key sensor modality for humans and robots
- Presented our ecosystem for research in tactile sensing aimed at simplifying integration and enable to perceive, understand, and interact through touch:
- Hardware
- Simulation
- Touch Processing
- Towards the long-term goal of making touch sensing practical and more accessible (both in research and in the real-world)
- Touch sensing is at the verge of a "digital revolution" that will make it ubiquitous and enable new applications
Thank you!
DIGIT
TACTO
PyTouch
