Planning with Graphs
of Convex Sets
Russ Tedrake
Grasp Lab Seminar
October 29, 2021

Slides available live at https://slides.com/d/absz0Qc/live
or later at https://slides.com/russtedrake/2021-grasp

Shortest Paths in Graphs of Convex Sets
Tobia Marcucci, Jack Umenberger, Pablo Parrilo, Russ Tedrake. Shortest Paths in Graphs of Convex Sets. (Under review)
Available at: https://arxiv.org/abs/2101.11565


Shortest Paths on Graphs of Convex Sets


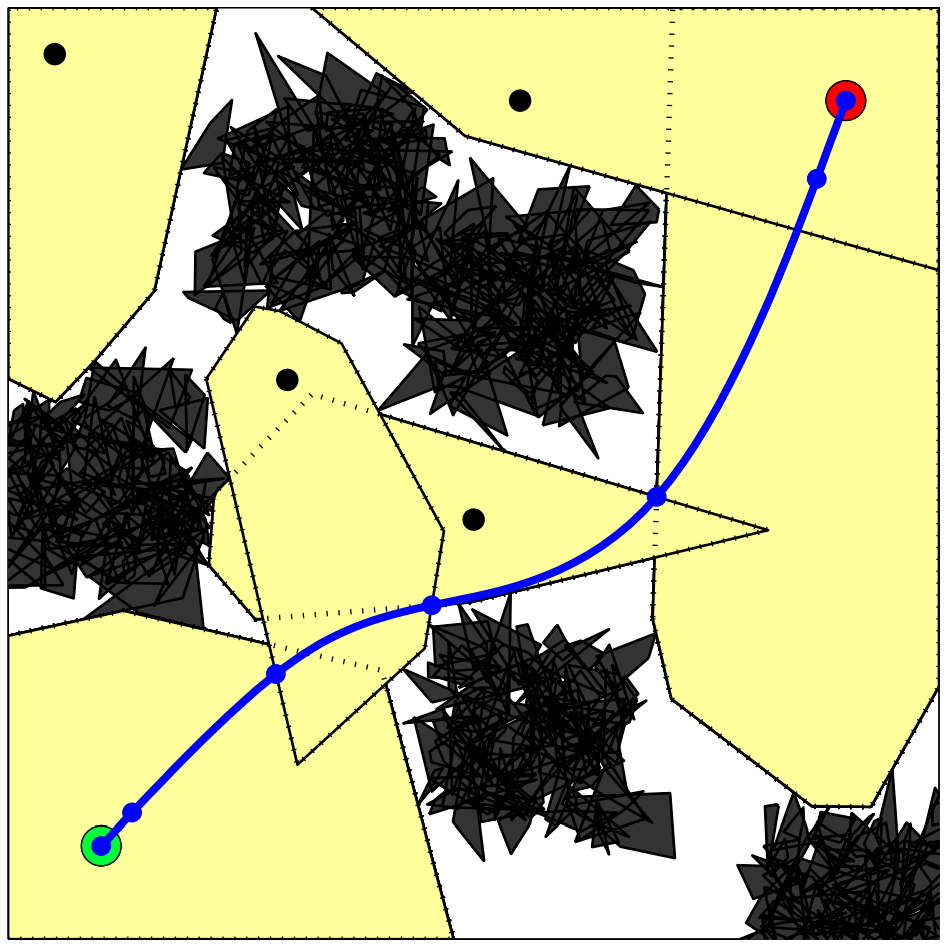
Sample-based motion planning
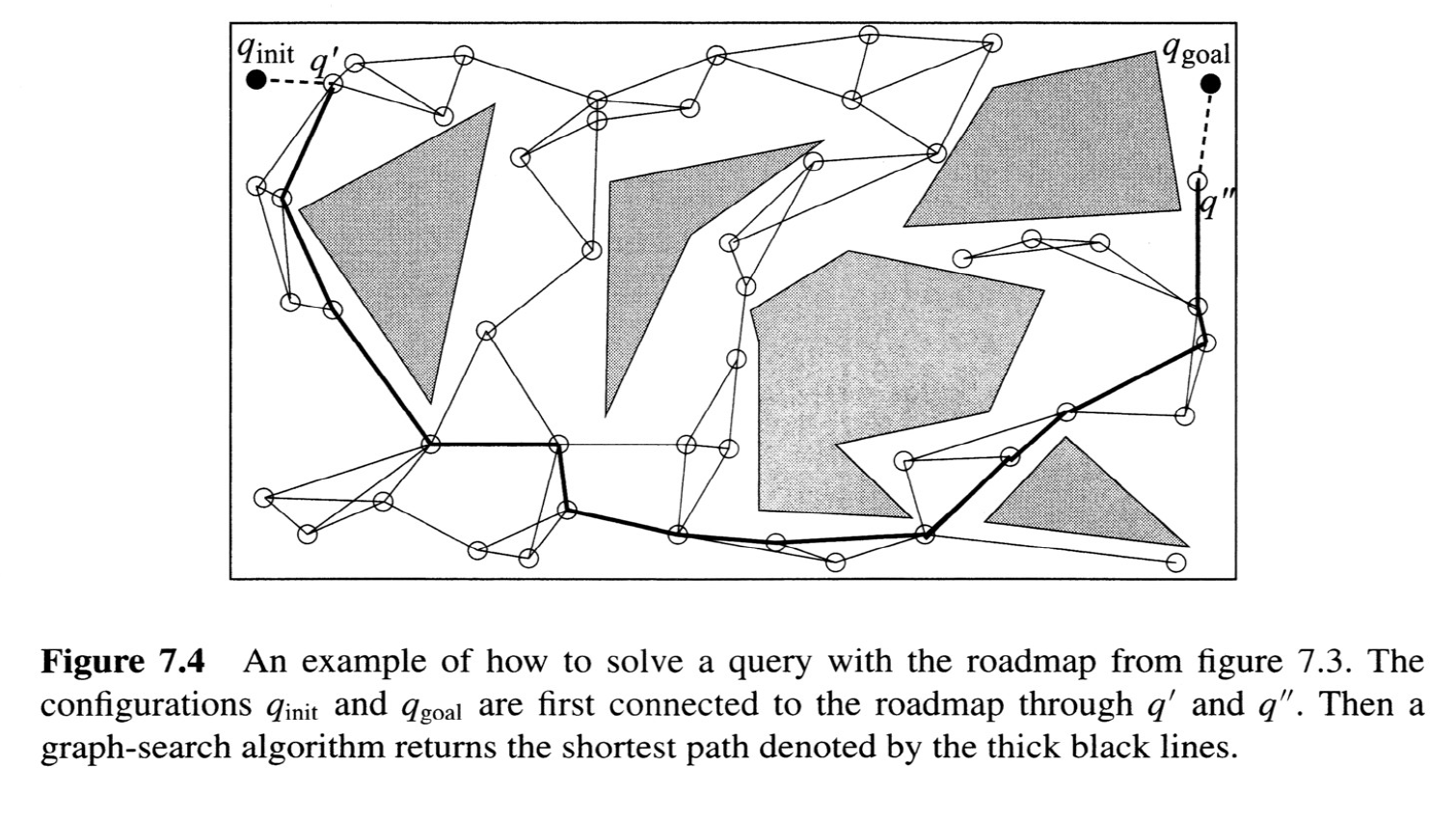
The Probabilistic Roadmap (PRM)
from Choset, Howie M., et al. Principles of robot motion: theory, algorithms, and implementation. MIT press, 2005.
Goal #1: Motion planning
Global optimization-based planning for manipulators with dynamic constraints
- Planning through contact
- Today: Collision-free planning
image credit: James Kuffner
Approximate
Goal #2: Deeper connections between

Trajectory optimization
Sample-based planning
AI-style logical planning
Combinatorial optimization
Collision-free planning with dynamic constraints
Running example: Shortest path around an obstacle
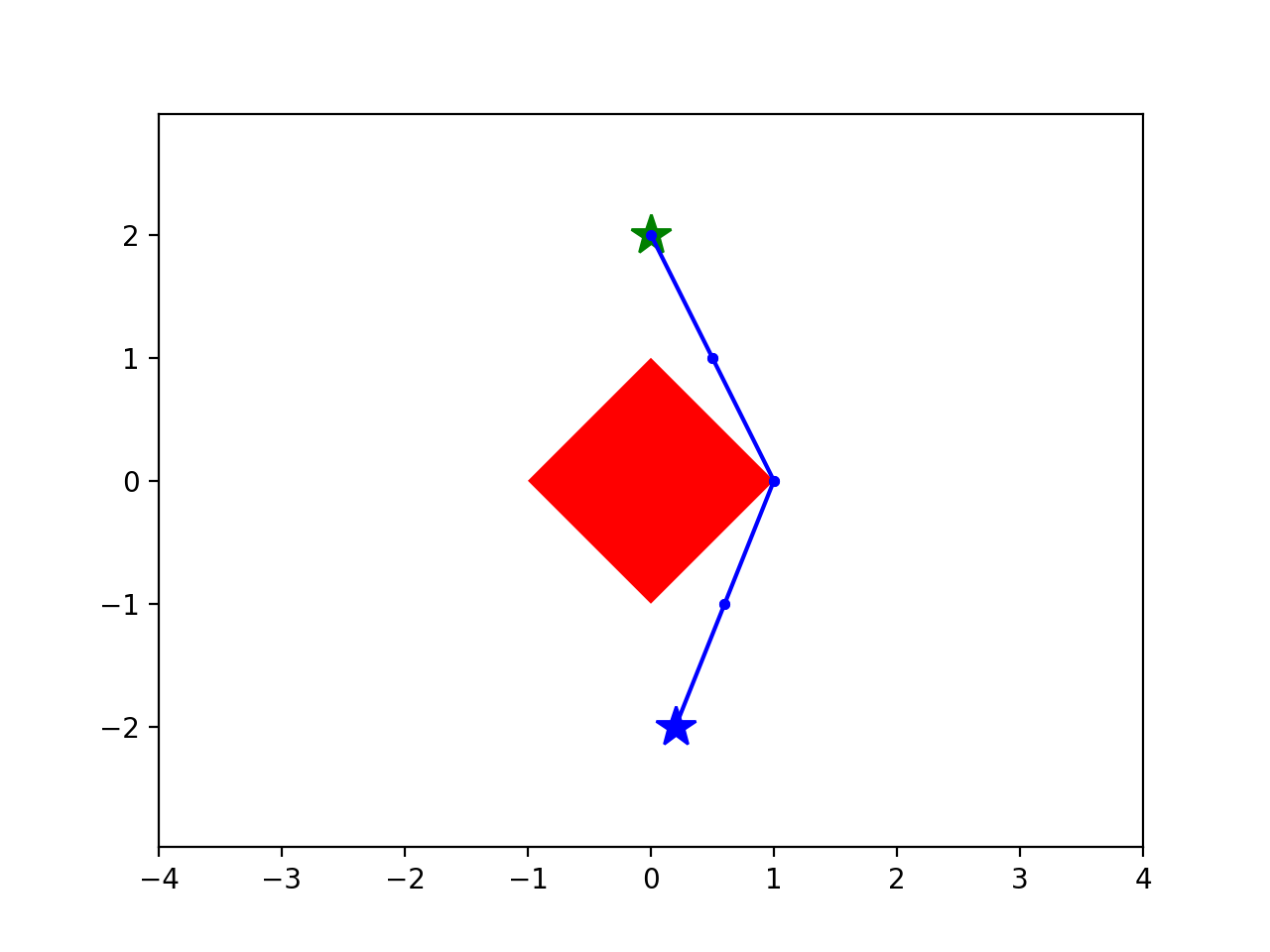
start
goal
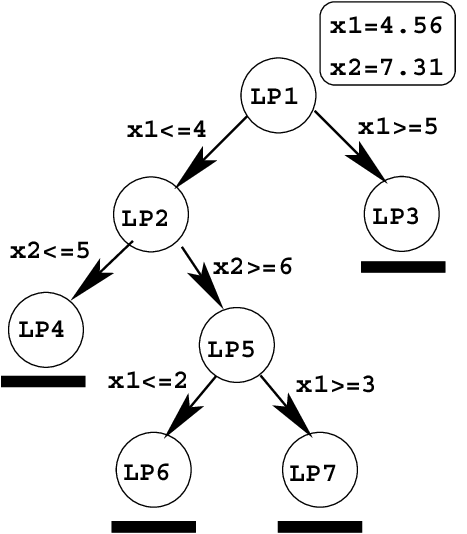
Step 1:
Big-M formulation

IRIS (Fast approximate convex segmentation)
- Iteration between (large-scale) quadratic program and (relatively compact) semi-definite program (SDP)
- Scales to high dimensions, millions of obstacles
- ... enough to work on raw sensor data
Running example: Shortest path around an obstacle
start
goal
Step 2:
Convex hull formulation
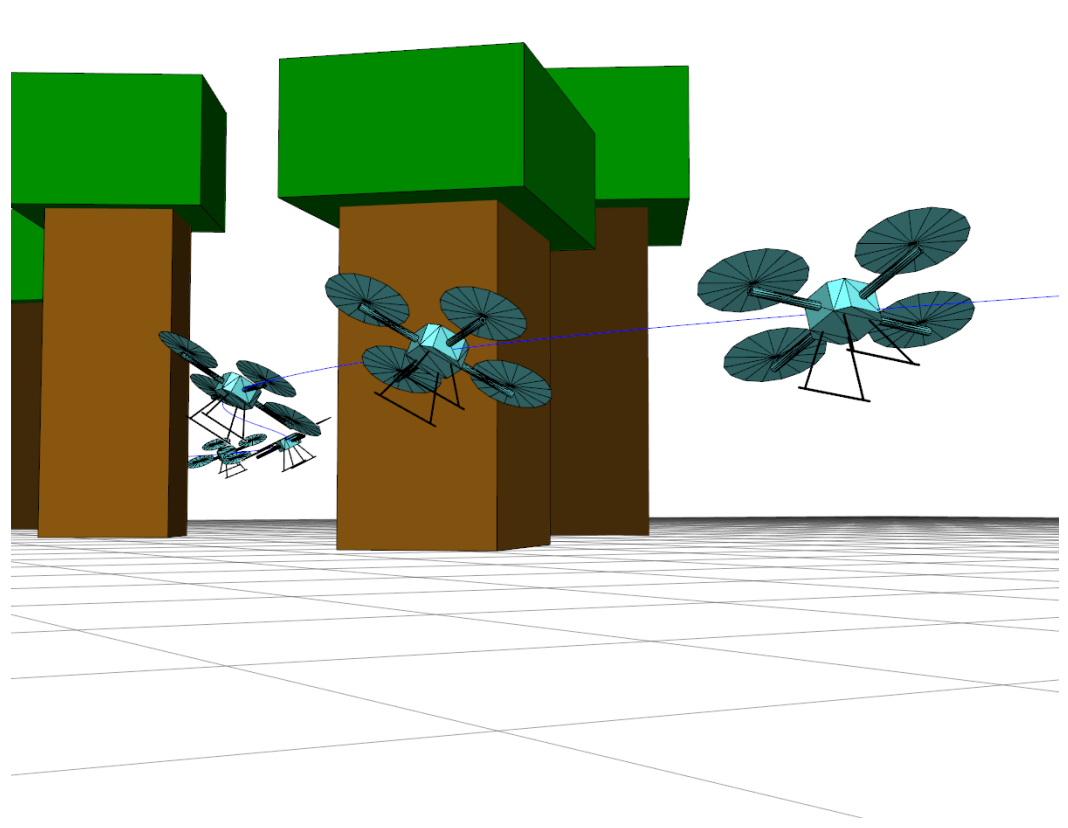
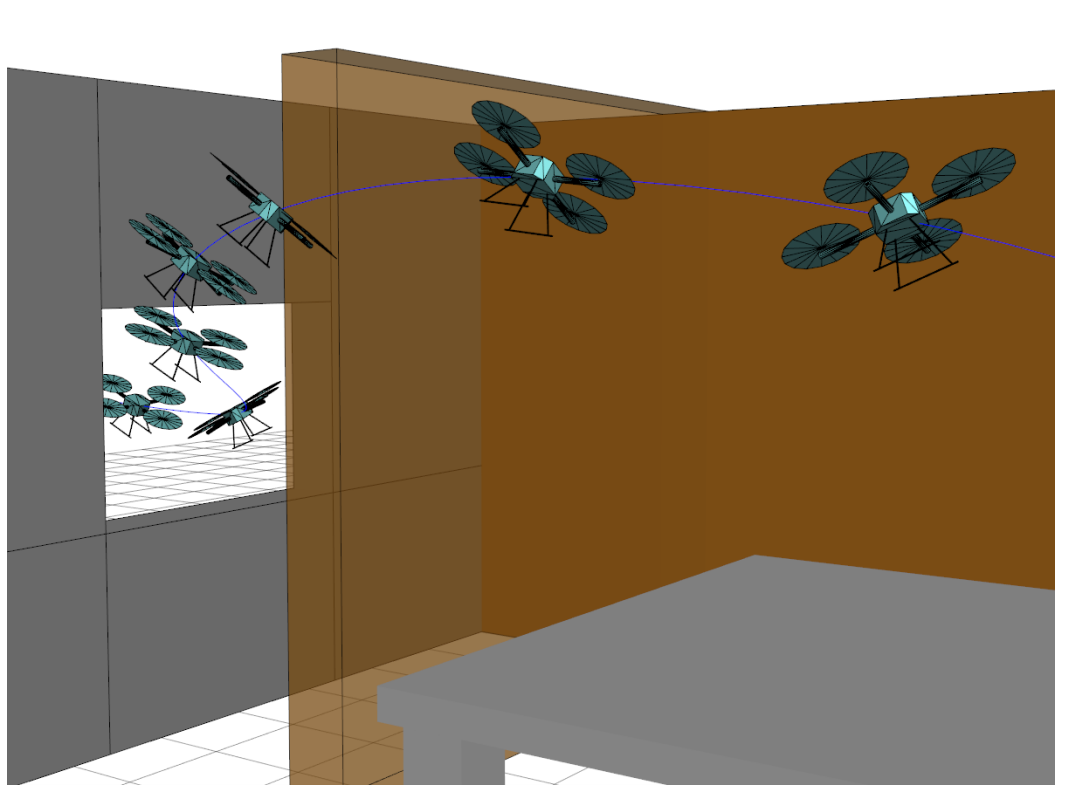
- Guaranteed collision-free along piecewise polynomial trajectories
- Complete/globally optimal within convex decomposition
Dynamic planning through contact
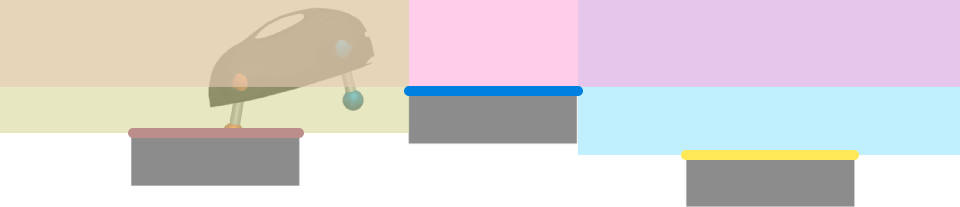
Dynamic planning through contact

Still not happy...
- Too many integer variables
- transcriptions add "false" combinatorial complexity
- Branch and bound working too hard
- loose convex relaxations
Pablo asked the right question...
"We know that the LP formulation of the shortest path problem is tight. Why exactly are your relaxations loose?"
- Vertices \(V\)
- (Directed) edges \(E\)
Traditional Shortest Path as a Linear Program (LP)
\(\varphi_{ij} = 1\) if the edge \((i,j)\) in shortest path, otherwise \(\varphi_{ij} = 0.\)
\(c_{ij} \) is the (constant) length of edge \((i,j).\)
"flow constraints"
binary relaxation
path length
Graphs of Convex Sets
-
For each \(i \in V:\)
- Compact convex set \(X_i \subset \R^d\)
- A point \(x_i \in X_i \)
- Edge length given by a convex function \[ \ell(x_i, x_j) \]
New shortest path formulation
Classic shortest path LP
now w/ Convex Sets
New shortest path formulation
- Use convex hull reformulation + perspective functions to rewrite this as mixed-integer convex.
- Strengthen convex relaxation by adding additional convex constraints (implied at binary feasibility).
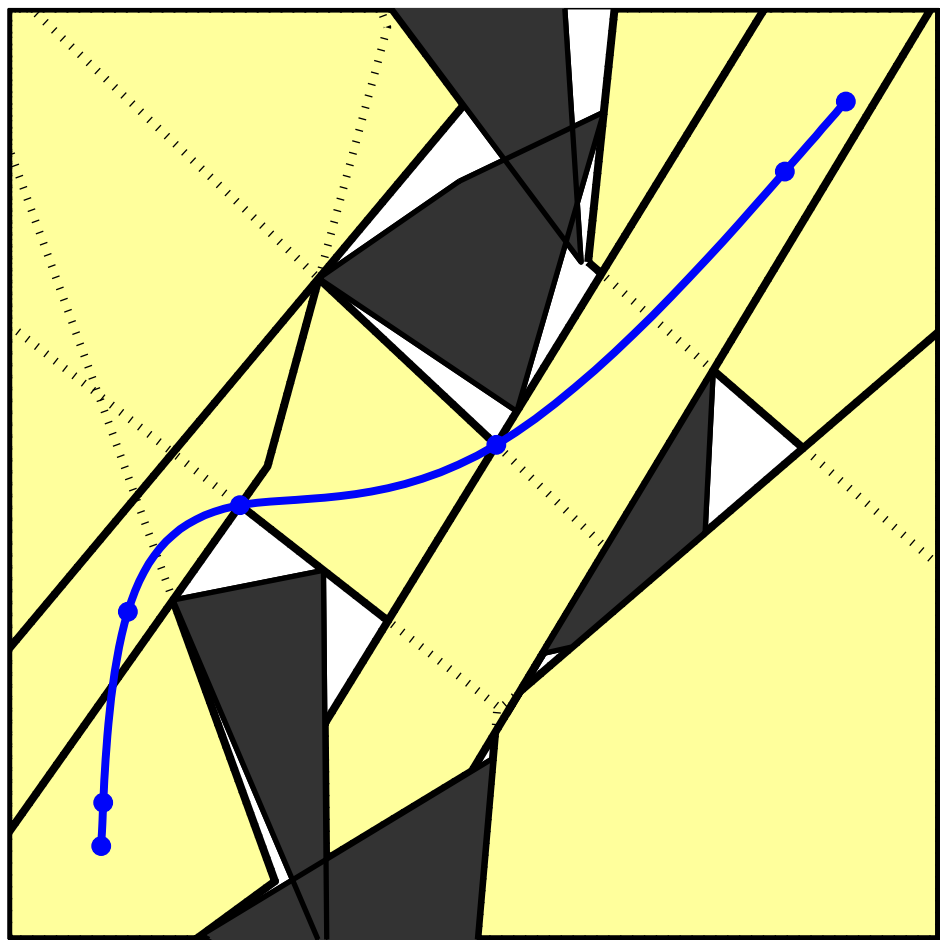
Running example: Shortest path around an obstacle
start
goal
Step 3:
New formulation
Did we resolve our issues?
- Too many integer variables
- transcriptions add "false" combinatorial complexity
- Branch and bound working too hard
- loose convex relaxations
Note: Path length is no longer predetermined
is the convex relaxation. (it's tight!)


Euclidean shortest path

- Finding the shortest path from A to B while avoiding polygonal obstacles (“Euclidean shortest path”):
- Solvable in polytime in 2D (with a visibility graph)
- NP-hard from 3 dimensions on
- For the 3D case there exists an approximation algorithm which gives you \(\epsilon\)-optimality in poly time
- Nothing is known for dimension \(\ge 4\)
- New formulation:
- Provides polynomial-time algorithm for dimension \(\ge 4\) that is often tight.
- Solves a more general class of problems (e.g. can add dynamic constraints).
- When sets \( X_i \) are points, reduces to standard LP formulation of the shortest path (known to be tight).
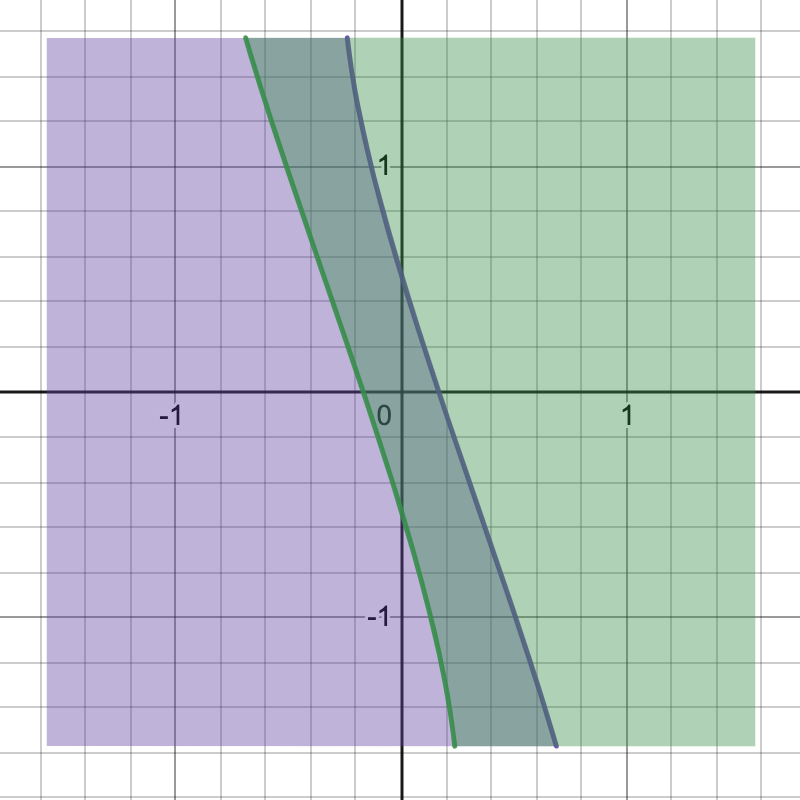
- There are instances of this problem that are NP-hard.
- We give simple examples where relaxation is not tight.
- Can add (piecewise-affine) dynamic constraints on pairs \( (x_i,x_j). \)
Remarks
Example: "Footstep planning" with \(x_{n+1}=Ax_n + Bu_n\)

| Previous best formulations | New formulation | |
|---|---|---|
| Lower Bound (from convex relaxation) |
7% of MICP | 80% of MICP |
Scaling
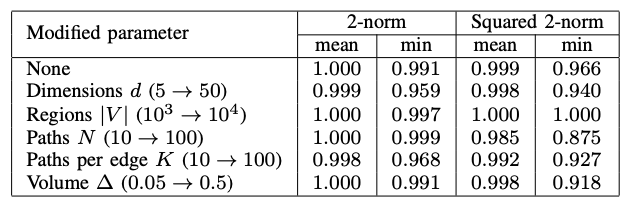
Most important changes (vs previous formulation)
- Binaries per edge, instead of per region
- Additional constraints which tighten the convex relaxation
Should be suitable for many graph-based optimization problems
Going forward...
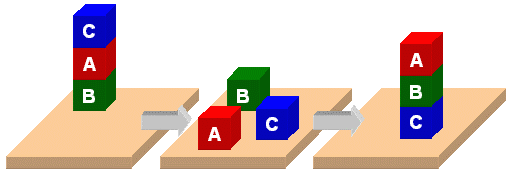
Example: Bipartite matching (with convex regions)

Back to motion planning
Manipulators at the dynamic limits
- Real applications are bumping up against dynamic limits (joint speed/acceleration/torque and friction limits, etc)
-
Observation: diverse motions, but relatively consistent environment.
- Precompute regions to make online optimization fast
Trajectories in graphs of convex sets
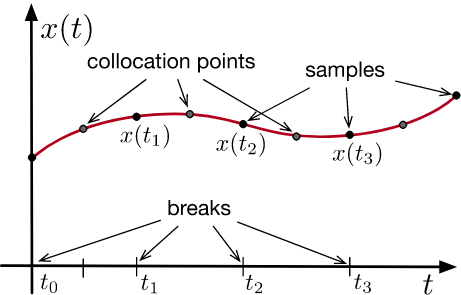
- B-spline parameterization
- Convex sets are Cartesian power of C-space regions
- Linear constraints connect segments
- Linear constraints for derivative limits (joint velocity, acceleration, ...)
work w/ Andres Valenzuela
Configuration-space regions
- Original IRIS algorithm assumed obstacles were convex
- New extensions for C-space
- Nonlinear optimization for speed
- Interval arithmetic for verification
work w/ Soonho Kong
Time-optimal rescaling
work w/ Mark Petersen

"Hydroelastic contact" as implemented in Drake
Summary
- New strong mixed-integer convex formulation for shortest path problems over convex regions
- reduces to shortest path as regions become points
- NP-hard; but strong formulation \(\Rightarrow\) efficient B&B
- Convex relaxations are often tight! \(\Rightarrow\) Rounding strategies
- Initial applications in manipulator planning at dynamic limits
Give it a try:
pip install drake
sudo apt install drakeGoal #2: Deeper connections between
Trajectory optimization
Sample-based planning
AI-style logical planning
Combinatorial optimization
My MIT manipulation class is online (videos + notes)
http://manipulation.mit.edu