Diffusion Policies
Towards Foundations Models for Control(?)
Russ Tedrake
Workshop on Control and Machine Learning
October 11, 2023


"What's still hard for AI" by Kai-Fu Lee:
-
Manual dexterity
-
Social intelligence (empathy/compassion)
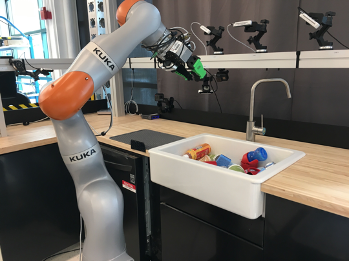
"Dexterous Manipulation" Team
(founded in 2016)
For the next challenge:
Good control when we don't have useful models?

For the next challenge:
Good control when we don't have useful models?
- Rules out:
- Simulation
- Reinforcement learning (in practice)
- State Estimation / Model-based control
- Two natural choices:
- Learn a dynamics model
- Behavior cloning (imitation learning)
Levine*, Finn*, Darrel, Abbeel, JMLR 2016
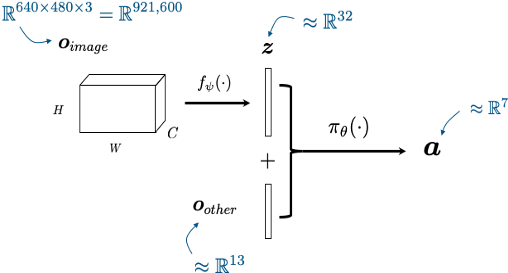
Visuomotor policies
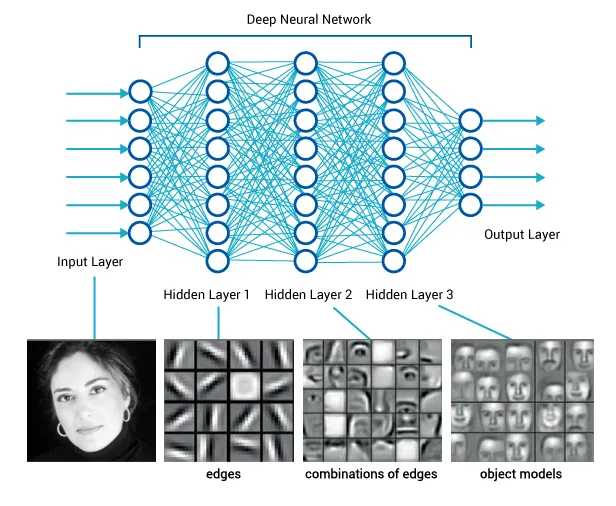
perception network
(often pre-trained)
policy network
other robot sensors
learned state representation
actions
x history
I was forced to reflect on my core beliefs...
- The value of using RGB (at control rates) as a sensor is undeniable. I must not ignore this going forward.
- I don't love imitation learning (decision making \(\gg\) mimcry), but it's an awfully CLEVR way to explore the space of policy representations
- Don't need a model
- Don't need an explicit state representation
- (Not even to specify the objective!)
We've been exploring, and seem to have found something...

Earlier this week...
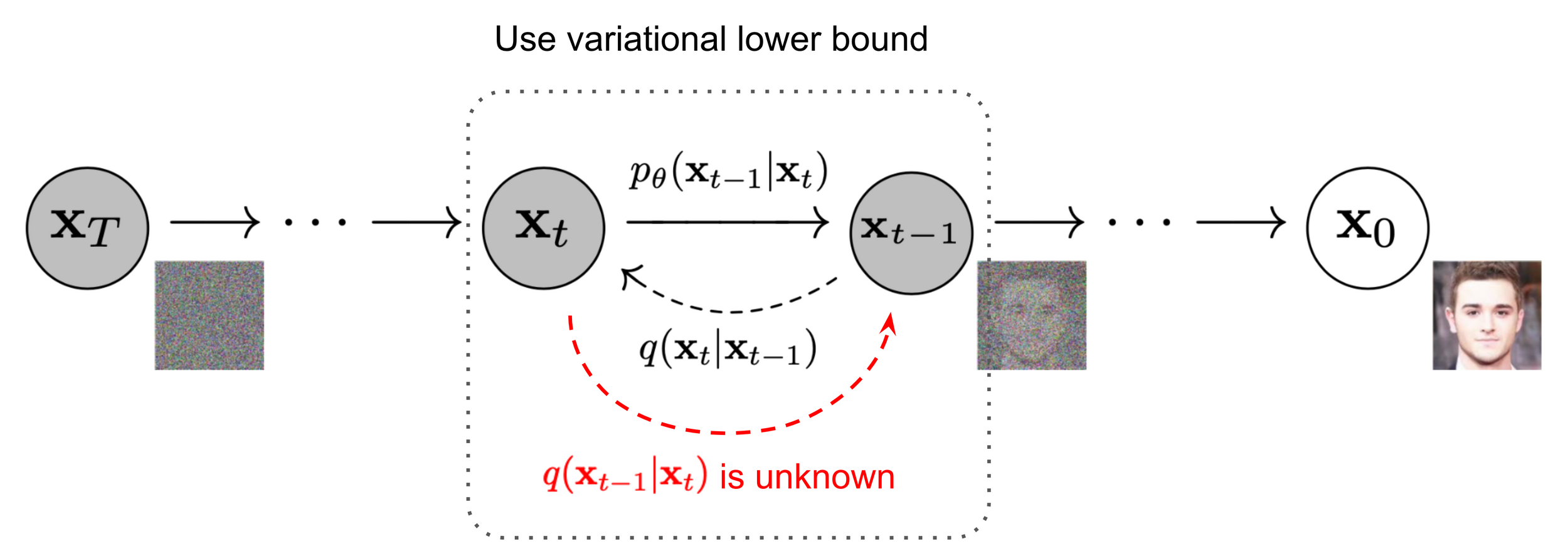
Denoising diffusion models (generative AI)
Image source: Ho et al. 2020
Denoiser can be conditioned on additional inputs, \(u\): \(p_\theta(x_{t-1} | x_t, u) \)
A derministic interpretation (manifold hypothesis)
Denoising approximates the projection onto the data manifold;
approximating the gradient of the distance to the manifold
Representing dynamic output feedback
input
output
Control Policy
(as a dynamical system)
"Diffusion Policy" is an auto-regressive (ARX) model with forecasting
\(H\) is the length of the history,
\(P\) is the length of the prediction
Conditional denoiser produces the forecast, conditional on the history
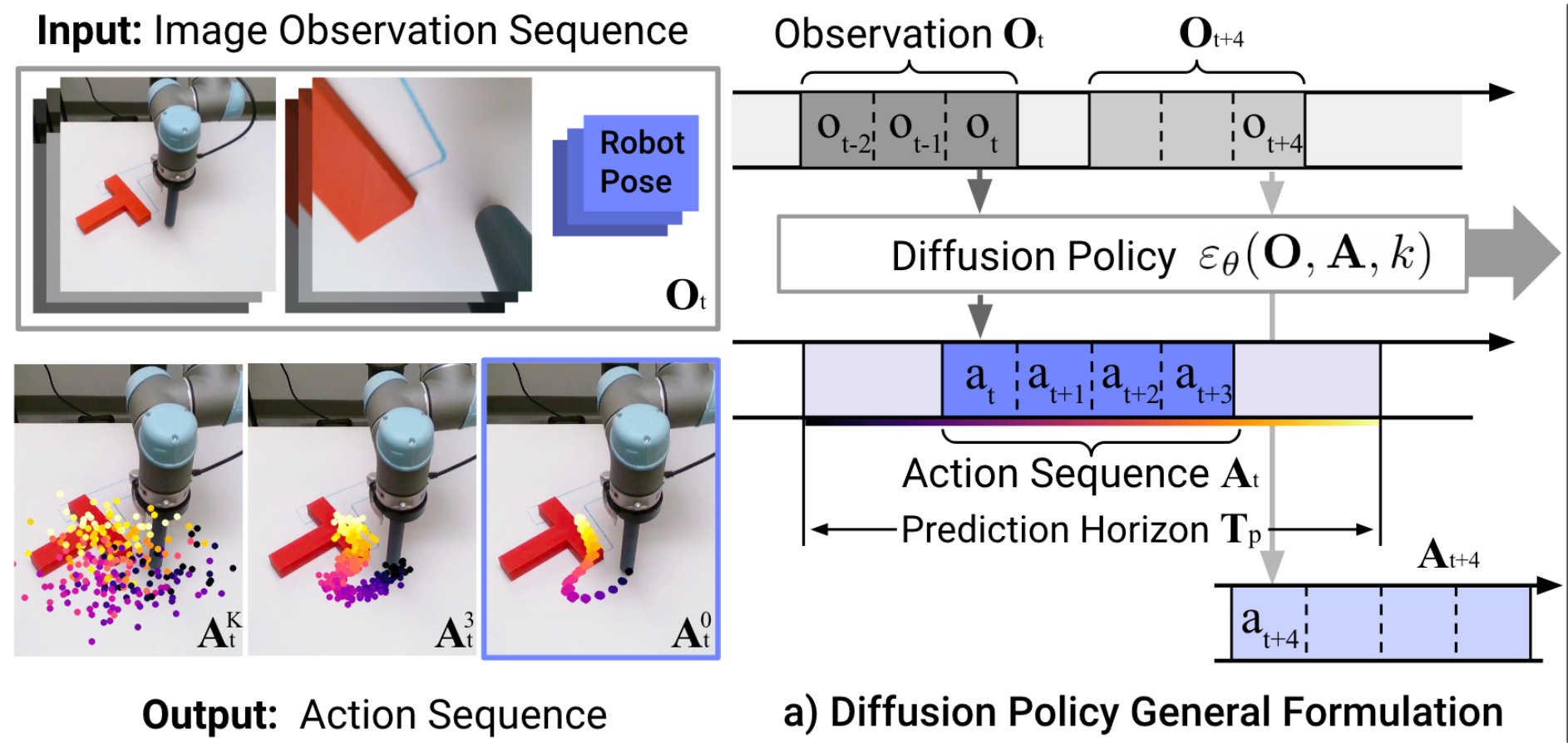
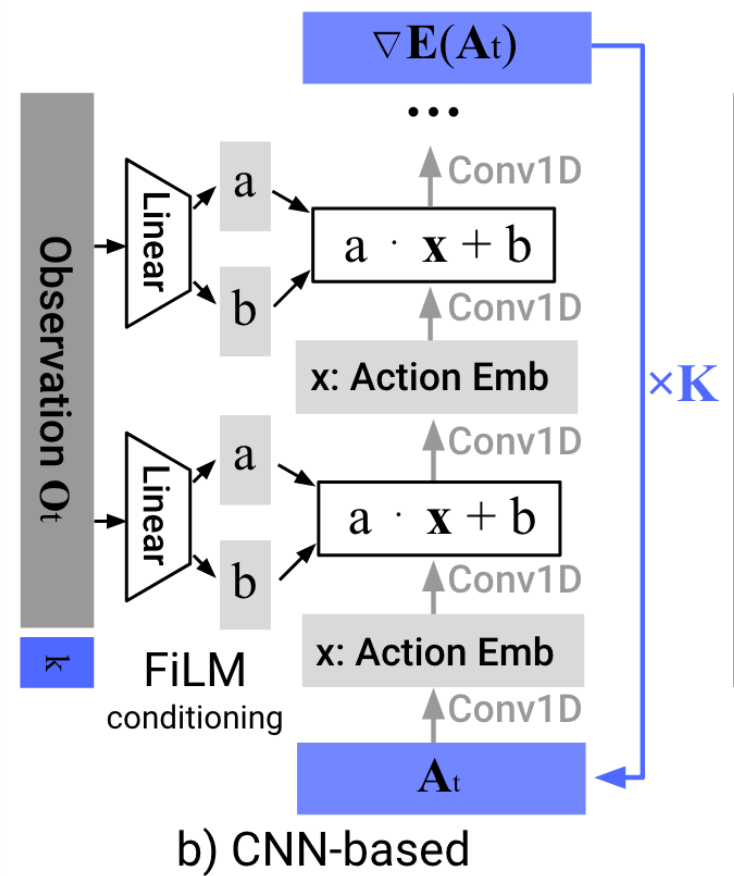
Image backbone: ResNet-18 (pretrained on ImageNet)
Total: 110M-150M Parameters
Training Time: 3-6 GPU Days ($150-$300)

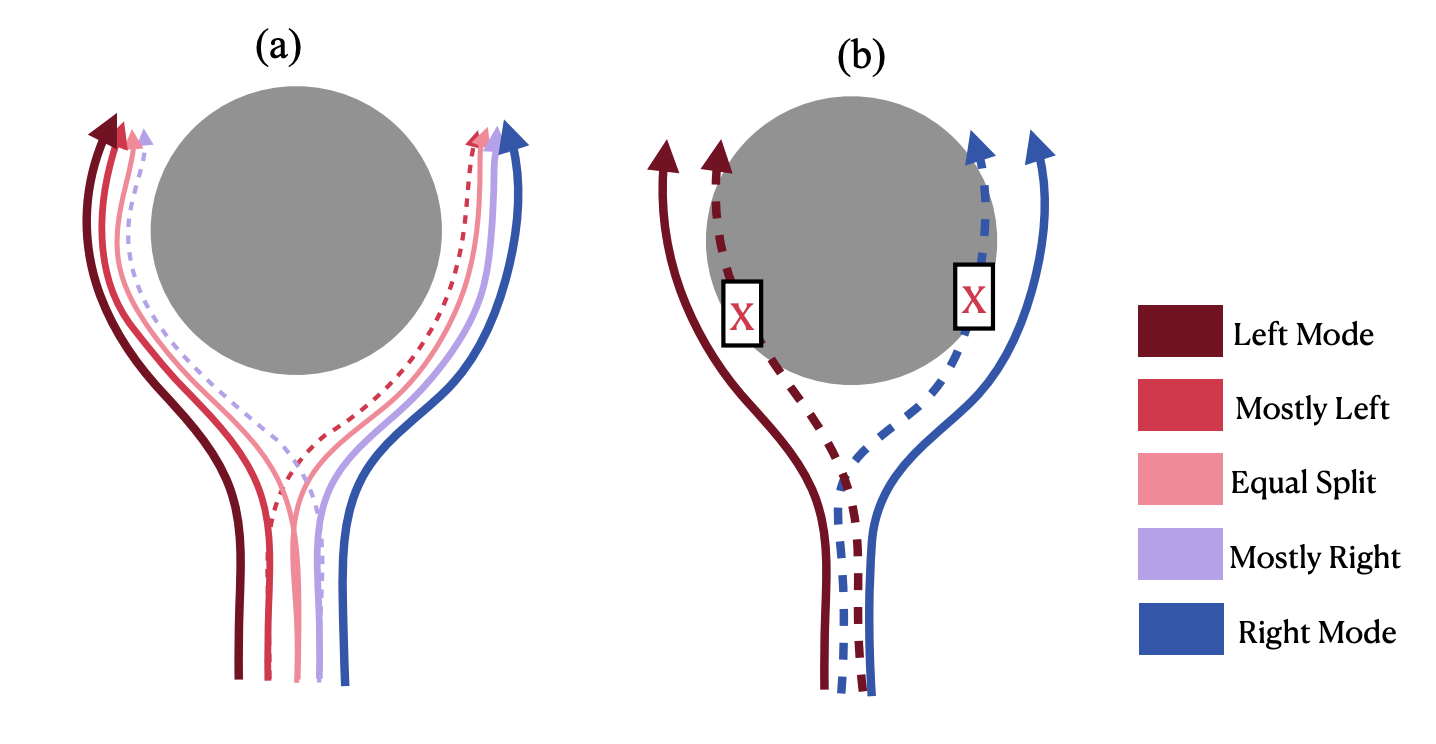
Learns a distribution (score function) over actions
e.g. to deal with "multi-modal demonstrations"
Why (Denoising) Diffusion Models?
- High capacity + great performance
- Small number of demonstrations (typically ~50)
- Multi-modal (non-expert) demonstrations
- Training stability and consistency
- no hyper-parameter tuning
- Generates high-dimension continuous outputs
- vs categorical distributions (e.g. RT-1, RT-2)
- Action-chunking transformers (ACT)
- Solid mathematical foundations (score functions)
- Reduces nicely to the simple cases (e.g. LQG / Youla)
Enabling technologies
Haptic Teleop Interface
Excellent system identification / robot control
Visuotactile sensing

with TRI's Soft Bubble Gripper
Open source:
Scaling Up
- I've discussed training one skill
-
Wanted: few shot generalization to new skills
- multitask, language-conditioned policies
- connects beautifully to internet-scale data
-
Big Questions:
- How do we feed the data flywheel?
- What are the scaling laws?
- I don't see any immediate ceiling
Discussion
I do think there is something deep happening here...
- Manipulation should be easy (from a controls perspective)
- probably low dimensional?? (manifold hypothesis)
- memorization can go a long way
If we really understand this, can we do the same via principles from a model? Or will control go the way of computer vision and language?
Summary
- Dexterous manipulation is still unsolved, but progress is fast
- Visuomotor diffusion policies
- currently via imitation learning from humans
- We need a deeper understanding (e.g. more theory)
- Much of our code is open-source:
pip install drake
sudo apt install drake