Introduction: Anatomy of a
Manipulation System

MIT 6.881: Robotic Manipulation
Fall 2020, Lecture 1

Follow live at https://slides.com/russtedrake/fall20-lec01/live
(or later at https://slides.com/russtedrake/fall20-lec01)
Course Info
Terry Suh
Meng Feng
Remote Teaching
I want lectures to be interactive.
(synchronous will be better!)
Piazza (sign up if you haven't)
Email: manipulation-staff@mit.edu
Open to everyone / anywhere:
- Watch + comment on YouTube
- Annotations on the "textbook"
Remote Teaching
I want lectures to be interactive.
(synchronous will be better!)
Please keep your video ON.
Please ask questions!
- Voice is OK.
- Chat is OK, too.
- You will not show up on YouTube.

Remote Teaching
I hope to lecture better than I have before
(by injecting code into your browser!)
Simulation experiments during lecture.
I'm very open to suggestions / changes
Please forgive my experiments, and give me feedback!
https://itempool.com/MIT-Robotic-Manipulation/live

https://www.pinterest.com/pin/549579960772413472/
Today
- What do I mean by "manipulation"?
- Live experiment (breakout rooms)
- What is drake?
- Anatomy of a manipulation system
- Goals for the course
Matt Mason says
- Definition 1 (etymological). Manipulation refers to the activities performed by hands.
- ...
- Definition 5. Manipulation refers to an agent’s control of its environment through selective contact.
Matthew T. Mason. Toward Robotic Manipulation. Annual Review of Control, Robotics, and Autonomous Systems, 1:1-28, 2018.
Motivation
Why do I study manipulation?
To be clear: we're not just controlling the arm
state of the robot x state of the environment
How important is feedback?
Alternative: Open-loop stability
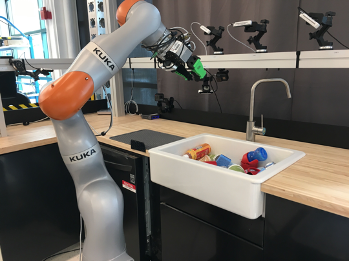
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
OpenAI - Learning Dexterity
kPAM: KeyPoint Affordances for Manipulation

Lucas Manuelli*, Wei Gao*, Peter R. Florence and Russ Tedrake. kPAM: KeyPoint Affordances for Category Level Manipulation. ISRR 2019

Dense Object Nets in Visuomotor Imitation Learning
Peter R. Florence, Lucas Manuelli, and Russ Tedrake. Self-Supervised Correspondence in Visuomotor Policy Learning. RA-L, April 2020

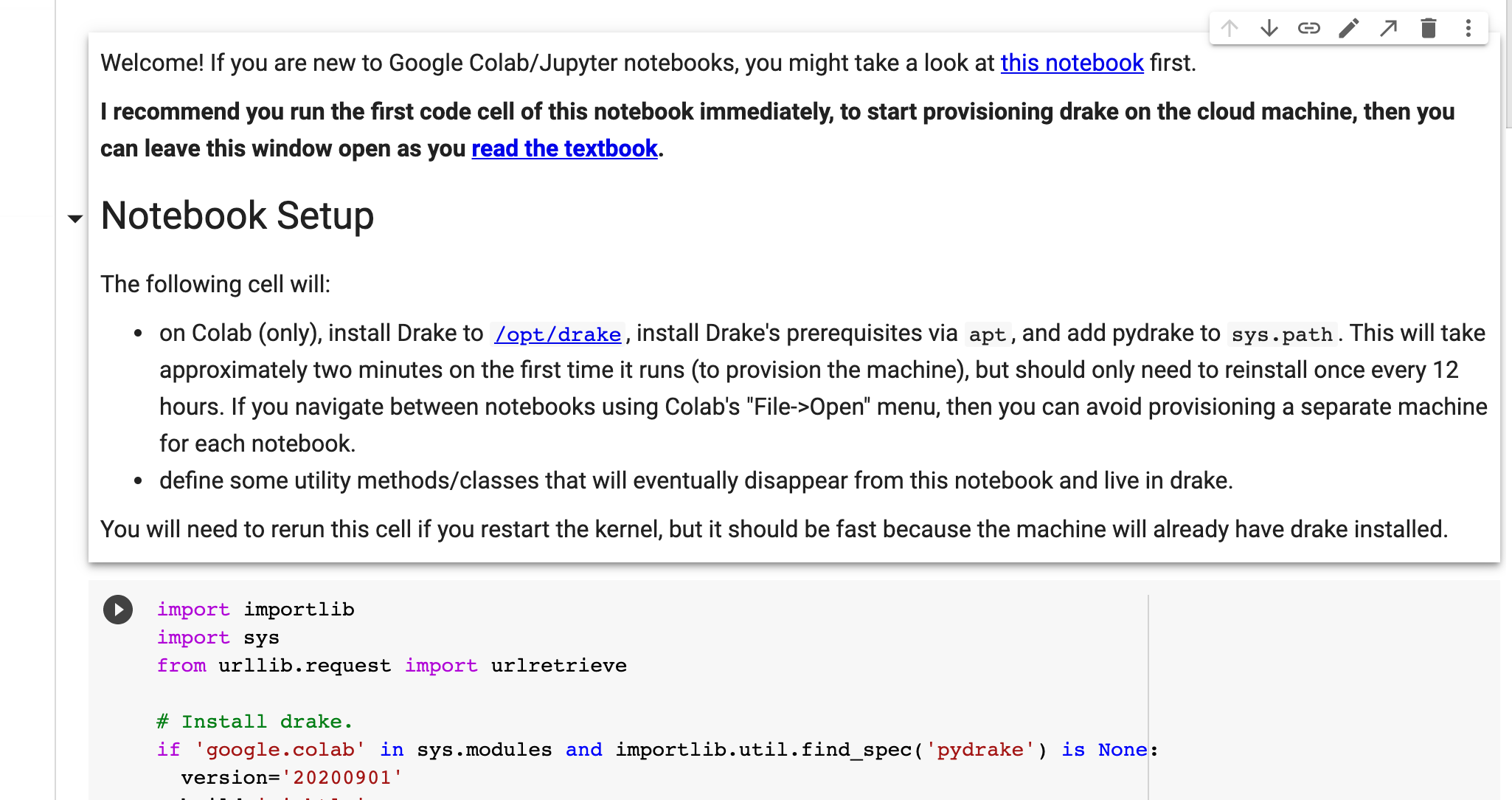
Time to experiment
(Zoom breakout rooms; lecture will continue in ~10 minutes)
also linked from Ch. 1 of http://manipulation.mit.edu
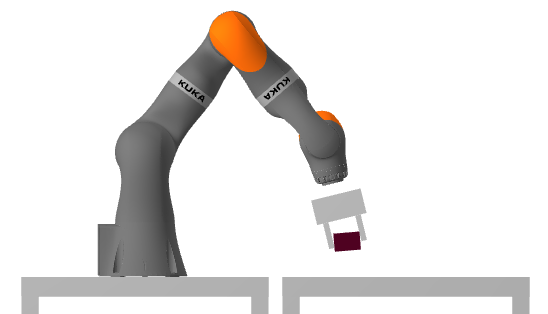
Your task: Run the simulator. Teleop the robot. Can you move the red brick from one bin to the other?
Try the 2D version, too.
What is drake?

|
ManipulationStation |
|
Logistics
- Students: Make sure you're on Piazza
- Read/comment on the lecture notes
- PSet 0 released tomorrow (on the course calendar).
- Due Wed. (Monday is a holiday)
- ~7 PSets throughout the class (approximately biweekly), due Monday (any time).
- Final project.