Motion Planning
Part I: Optimization-based

MIT 6.800/6.843:
Robotic Manipulation
Fall 2021, Lecture 15

Follow live at https://slides.com/d/CnDN410/live
(or later at https://slides.com/russtedrake/fall21-lec15)
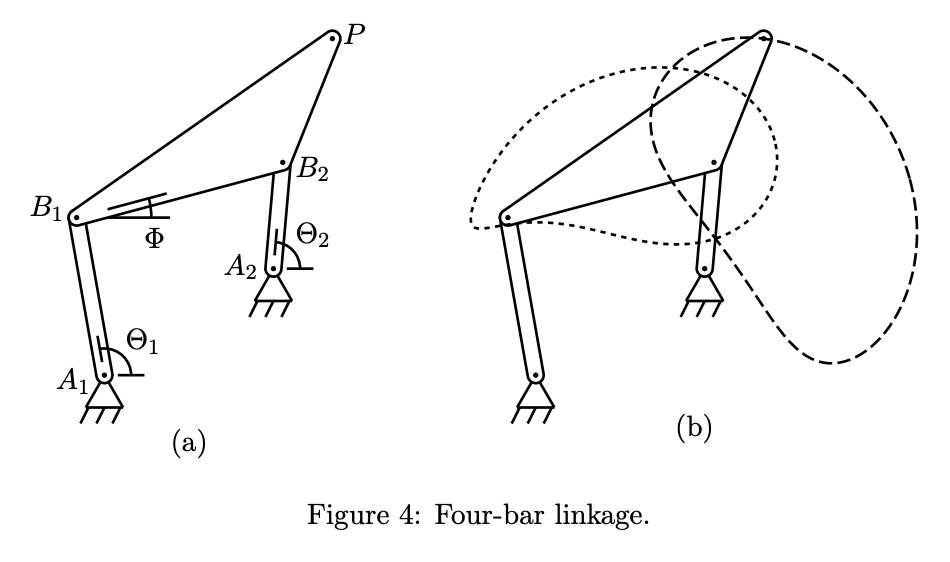
Charles W. Wampler and Andrew J. Sommese. Numerical algebraic geometry and algebraic kinematics. Acta Numerica, 20:469-567, 2011.
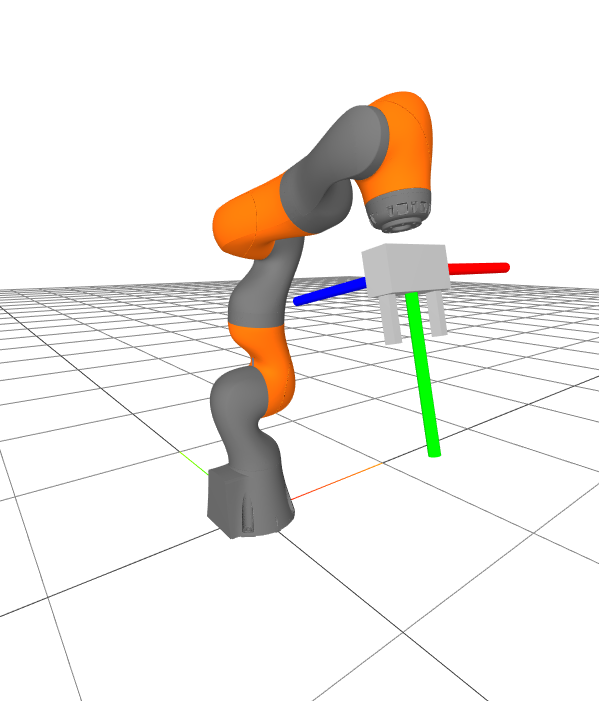
Inverse kinematics as an optimization
\min_q | q-q_{desired}|
subject to:
- rich end-effector constraints
- joint limits
- collision avoidance
- "gaze constraints"
- "feet stay put"
- balance (center of mass)
- ...
work by Hongkai Dai et al. at TRI
Danny Driess and Jung-Su Ha and Marc Toussaint, Deep Visual Reasoning: Learning to Predict Action Sequences for Task and Motion Planning from an Initial
Scene Image, Robotics: Science and Systems (R:SS) 2020.