Introduction: Anatomy of a
Manipulation System

MIT 6.4210/2: Robotic Manipulation
Fall 2022, Lecture 1

Follow live at https://slides.com/d/NNhTngg/live
(or later at https://slides.com/russtedrake/fall22-lec01)
Course Info
Boyuan Chen



Anthony Simeonov
Ria Sonecha
6.4210 is a CI-M (Communication Intensive in the Major)

David Robledo
Nora Jackson
Communications Instructors from Comparative Media Studies/Writing
Recitations Fridays afternoons (starting Sept 16)
Elizabeth Stevens


from the course website:
Logistics
- Students: Make sure you're on Piazza
- Review the course guidelines.
- Read/comment on the lecture notes
- Weekly problem sets throughout the class, due Wed.
- Problem Set 1 released tomorrow (on the course calendar).
- Final project.
Today
- What do I mean by "manipulation"? (with examples!)
- The systems theory perspective
- Anatomy of a manipulation system
- Goals for the course
Matt Mason says
- Definition 1 (etymological). Manipulation refers to the activities performed by hands.
- ...
- Definition 5. Manipulation refers to an agent’s control of its environment through selective contact.
Matthew T. Mason. Toward Robotic Manipulation. Annual Review of Control, Robotics, and Autonomous Systems, 1:1-28, 2018.
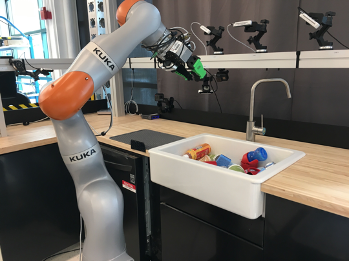
"Open-world" Manipulation
- Definition 5. Manipulation refers to an agent’s control of its environment through selective contact.
-
Even broader: "Open-world" manipulation requires:
- rich perceptual understanding of the environment,
- "common-sense" understanding of objects,
- the ability to make long-term (task-level) plans, and combine them with fine (joint-level) motions.
Motivation
Low-level feedback control from cameras / sensors
(continuous time/state/action)
Scene-understanding +
Task-level Planning
(discrete/symbolic)
From a controls perspective...

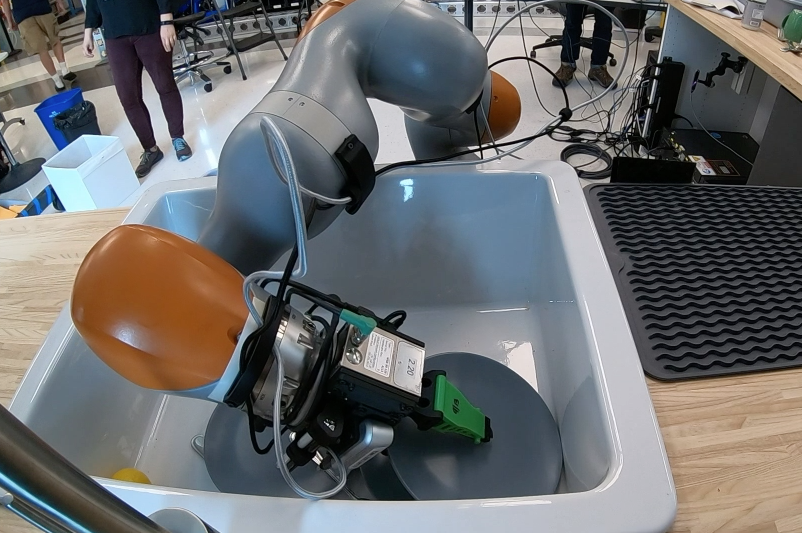
How important is feedback in manipulation?
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
The complexities of grasping in the wild. Nakamura et al, Humanoids, 2017
To be clear: we're not just controlling the arm
state of the robot x state of the environment

Manipulation is much more than "pick and place"!
"some interesting failure cases"
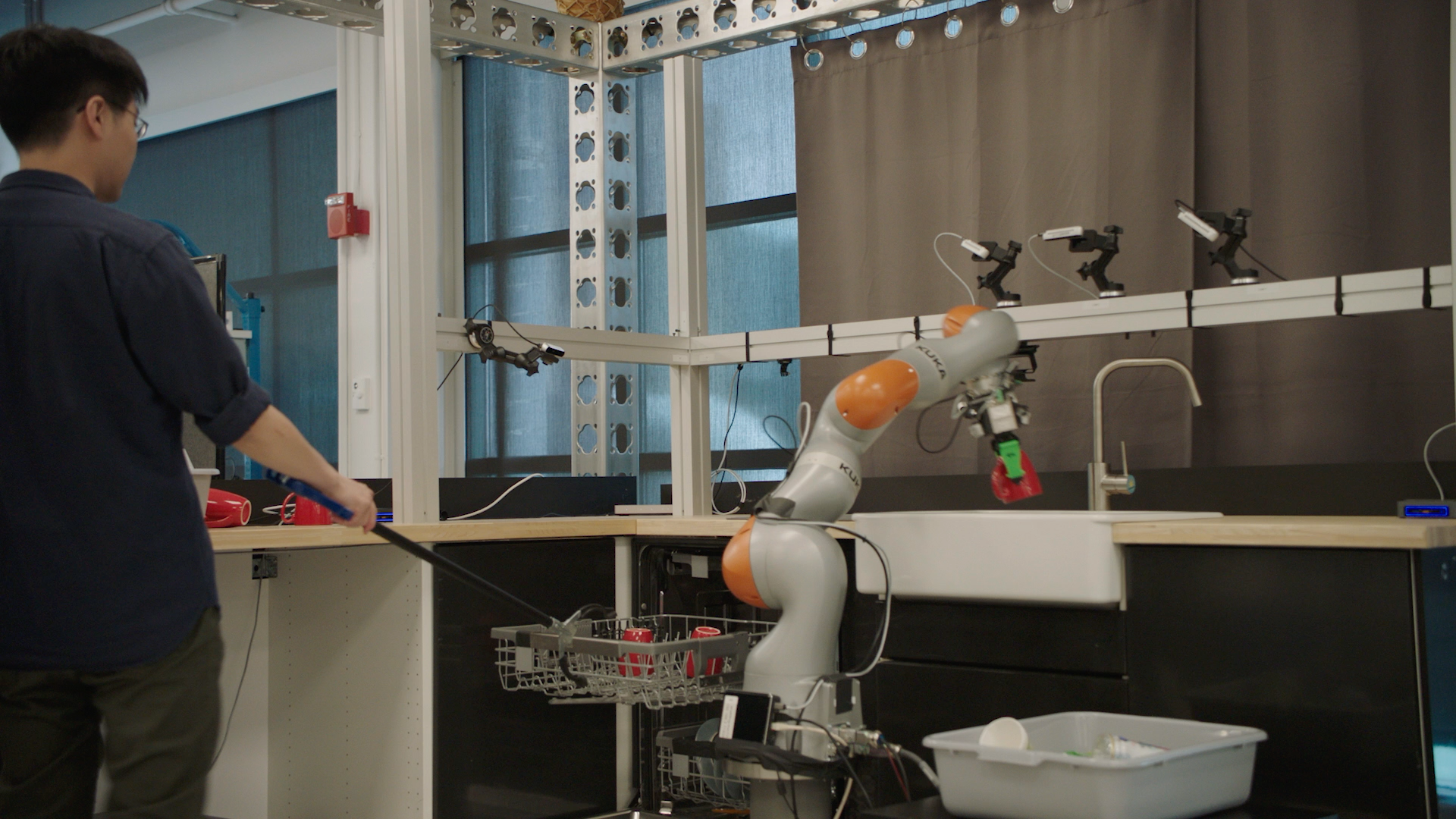
The anatomy of a modern manipulation system
What is Drake?


Logistics
- Students: Make sure you're on Piazza
- Review the course guidelines.
- Read/comment on the lecture notes
- Weekly problem sets throughout the class, due Wed.
- Problem Set 1 released tomorrow (on the course calendar).
- Final project.
(and I promise I'll keep working on getting us a proper room!)