Manipulation in Clutter
Part 2:
Grasp Selection

MIT 6.4210/2:
Robotic Manipulation
Fall 2022, Lecture 9

Follow live at https://slides.com/d/zueY9Ls/live
(or later at https://slides.com/russtedrake/fall22-lec09)
Course Roadmap
- Basic pick and place:
- single known object
- assuming known pose
- Geometric perception
- single known object
- unknown pose
-
This week
- many/diverse unknown objects
- unknown poses
- simple task: "clutter clearing"
"Clutter clearing" (an early project at TRI)
Initial conditions using simulation
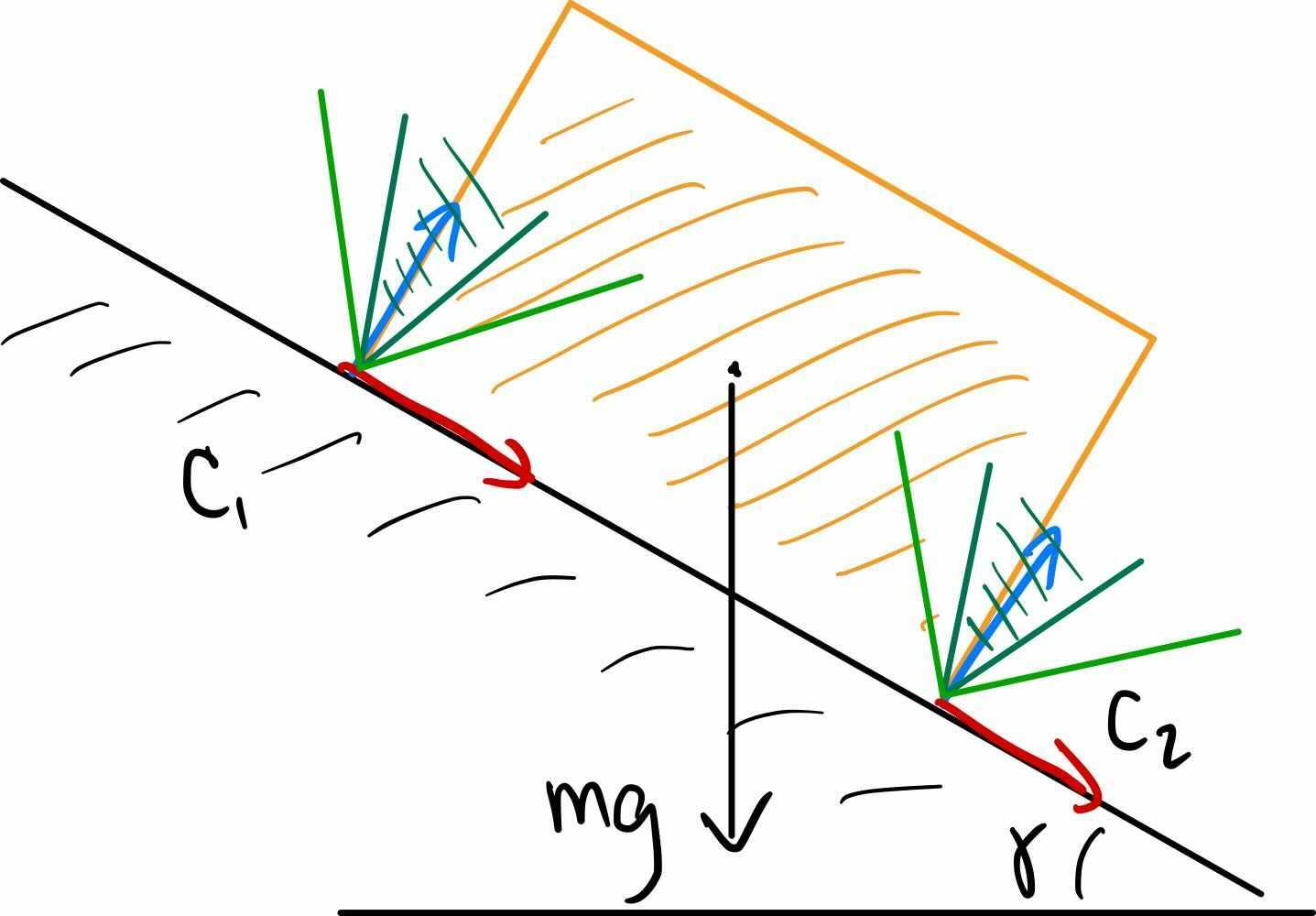
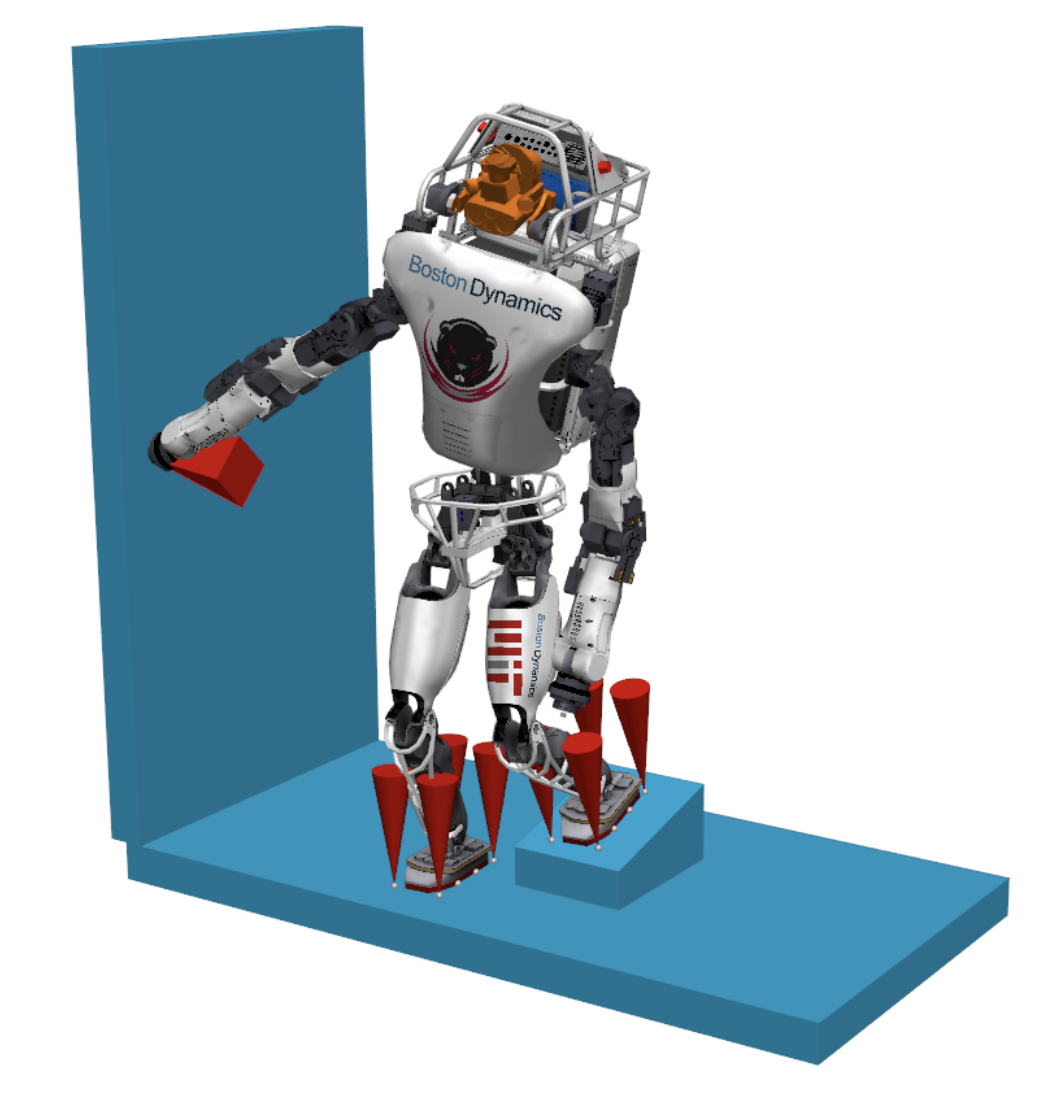
Contact mechanics (friction cones, ...)
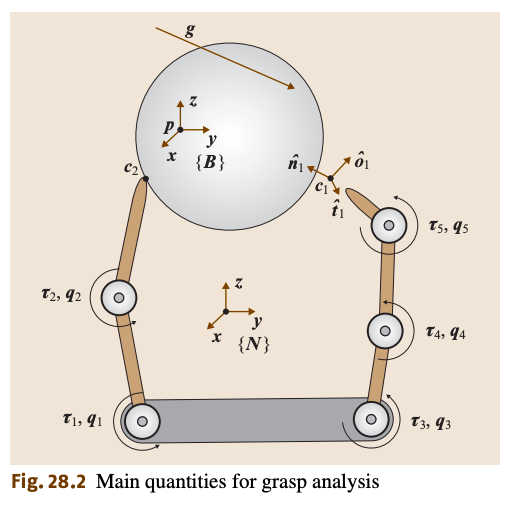
Grasp analysis / optimization

(unpublished) work by Lucas Manuelli ~2017. No deep learning -- this is geometry only.
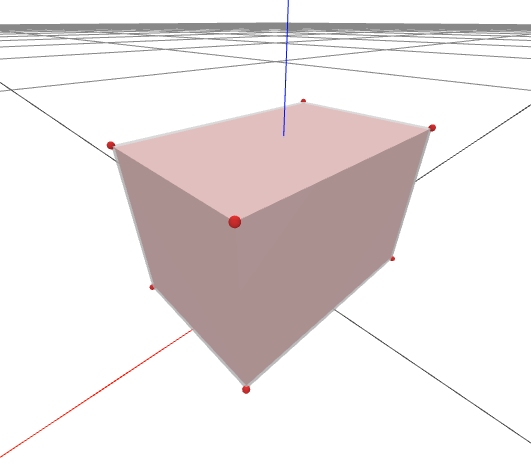
Voxelization
http://www.open3d.org/docs/latest/tutorial/Advanced/voxelization.html
Limitations of using geometry only
- No understanding of what an object is.
- "Double picks"
- Might pick up a heavy object from one corner
- Partial views
- Depth returns don't work for transparent objects
- ...