Large Behavior Models
(Foundation models for dexterous manipulation)
Russ Tedrake
MIT, EECS/CSAIL
russt@mit.edu

DARPA Robotics Competition, 2015
LLMs \(\Rightarrow\) VLMs \(\Rightarrow\) LBMs
large language models
visually-conditioned language models
large behavior models
\(\sim\) VLA (vision-language-action)
\(\sim\) EFM (embodied foundation model)
vision encoder
language encoder
action
decoder
robot joint encoder
Q: Is predicting actions fundamentally different?
Why actions (for dexterous manipulation) could be different:
- Actions are continuous (language tokens are discrete)
- Have to obey physics, deal with stochasticity
- Feedback / stability
- ...
should we expect similar generalization / scaling-laws?

Robotics: Science and Systems, 2023
Diffusion Policy
\(\Rightarrow\) Many new startups (some low-cost, some humanoids)
\(\Rightarrow\) Major new investments by tech giants
&
The opportunity
- Common-sense for physical intelligence
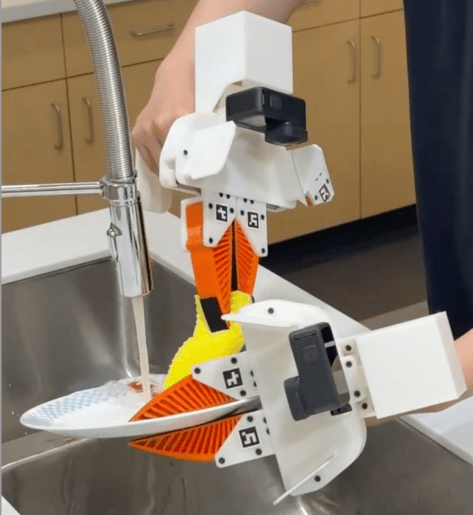
- New levels of dexterity (manipulating cloth, liquids, etc)
- Programmed via imprecise natural language and/or a few demonstrations
- "Common-sense robustness"
- GPT might make mistakes, but it always produces beautiful prose...
Q: Is predicting actions fundamentally different?
Why actions (for dexterous manipulation) could be different:
- Actions are continuous (language tokens are discrete)
- Have to obey physics, deal with stochasticity
- Feedback / stability
- ...
should we expect similar generalization / scaling-laws?
One problem: we don't (yet) have internet scale robot data
The Robot Data Diet

Big data
Big transfer
Small data
No transfer
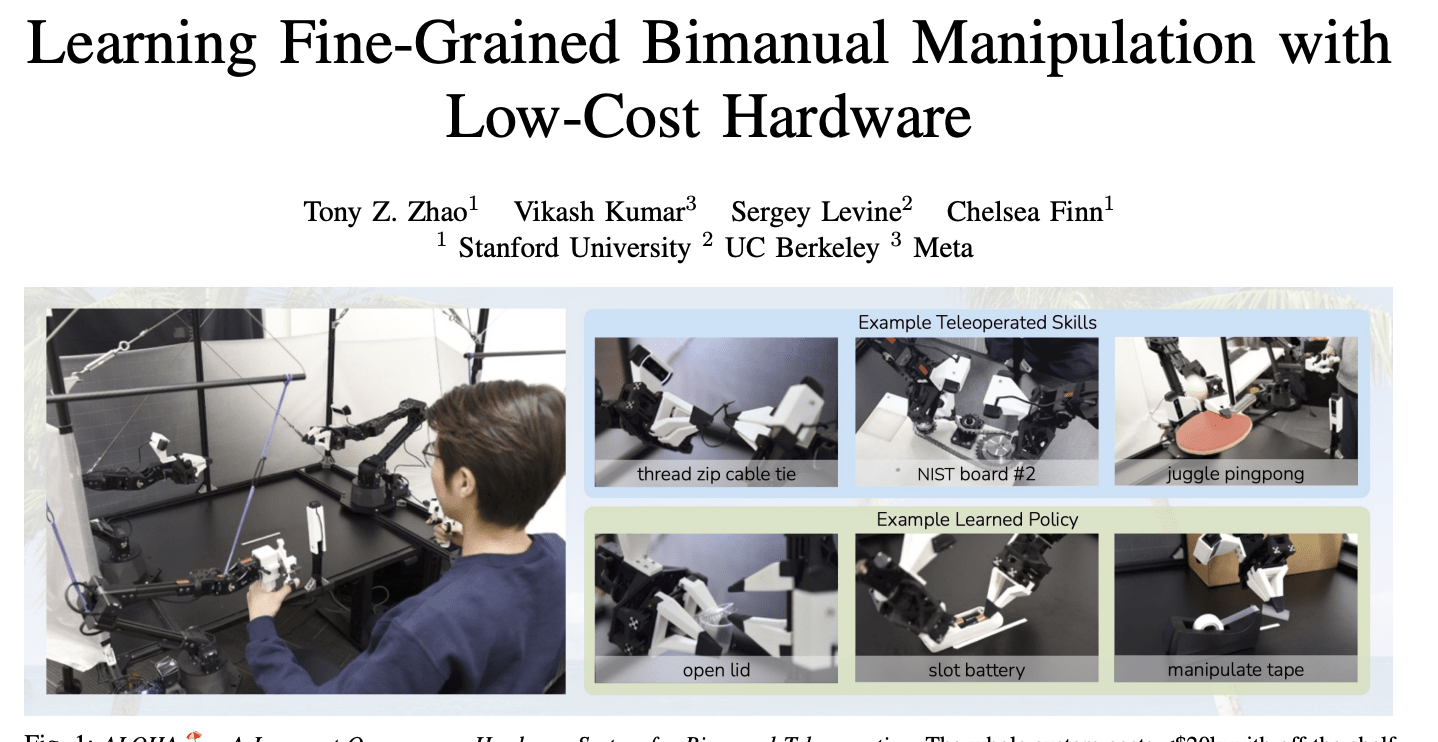
robot teleop

(the "transfer learning bet")

Open-X
simulation rollouts

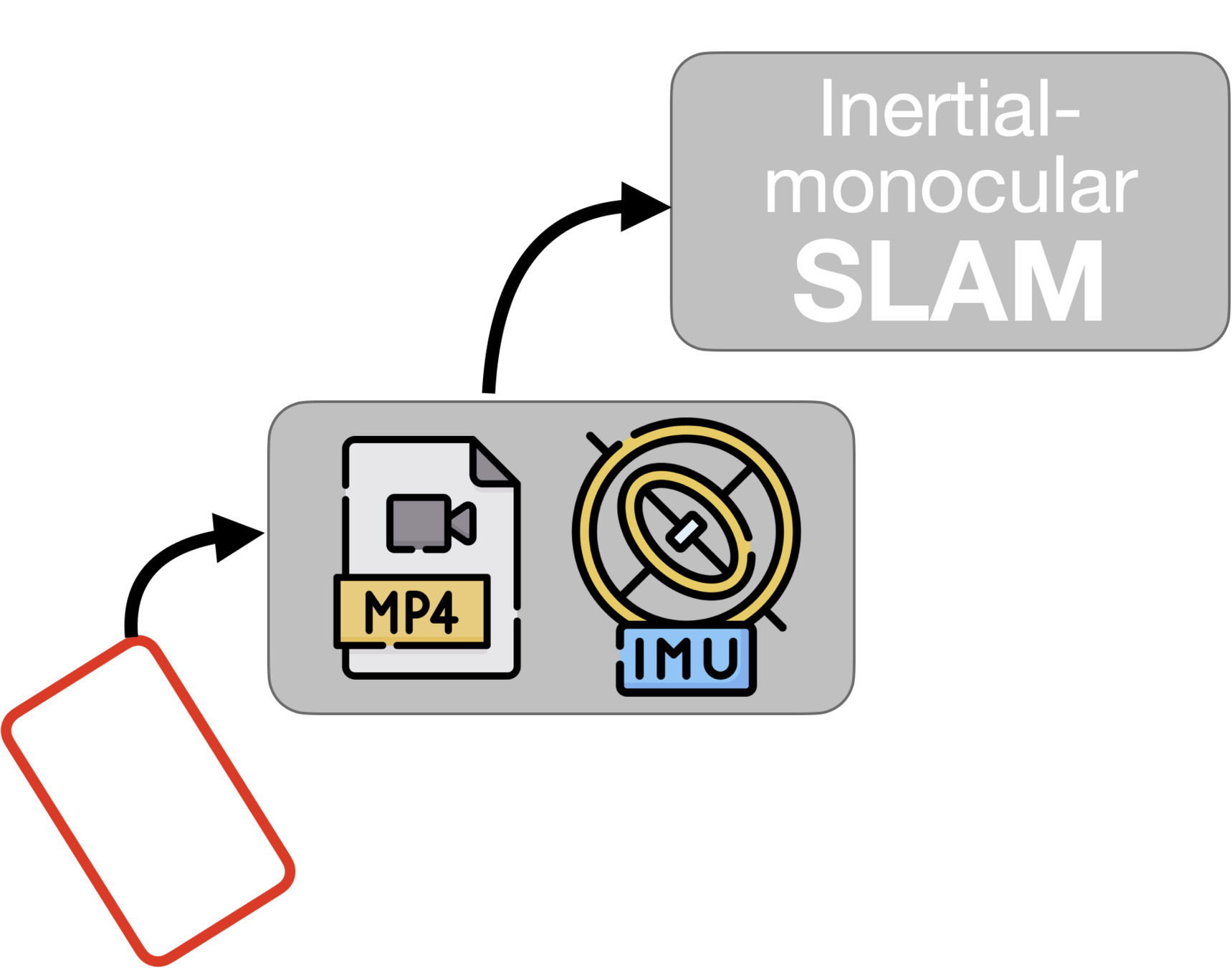
novel devices
simulation for manipulation

NVIDIA selected Drake and MuJoCo
(for potential inclusion in Omniverse)
(Establishing faith in)
Studying the (new) fundamentals requires scale
- Entirely new basic research questions (both theoretical and experimental)
- Robotics is becoming "big science"
- MIT (and academia more generally) has an essential role to play
- need access to compute
- need access to / strategies for scaling data
- strong partnerships with industry
Online classes (videos + lecture notes + code)
http://manipulation.mit.edu